動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)技術(shù)研究
2022-01-11 08:33:46李連峰張曉磊
鐵道車輛 2021年6期
李連峰,張曉磊,劉 林
(中車青島四方機(jī)車車輛股份有限公司,山東 青島 266111)
開展“全產(chǎn)業(yè)鏈、全壽命周期、全溯源鏈、前瞻性”的計(jì)量測試技術(shù)研究,提升高速列車產(chǎn)業(yè)關(guān)鍵領(lǐng)域、關(guān)鍵設(shè)備的計(jì)量測試和量值傳遞技術(shù)能力,是支撐、促進(jìn)、引領(lǐng)和創(chuàng)新發(fā)展高速列車產(chǎn)業(yè)計(jì)量測試體系的關(guān)鍵。本文通過對動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)技術(shù)的研究,形成了規(guī)范的校準(zhǔn)方案,解決了動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)的校準(zhǔn)難題。
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)主要用于動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn),是配合動(dòng)車組轉(zhuǎn)向架生產(chǎn)組裝及相關(guān)尺寸檢測的試驗(yàn)設(shè)備。動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)采用電液伺服加載方式模擬車體質(zhì)量,通過對輪重差、軸距、保壓以及各種功能的檢測或參數(shù)的測量,實(shí)現(xiàn)對動(dòng)車組轉(zhuǎn)向架的性能檢測[1]。動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)的性能穩(wěn)定可靠至關(guān)重要,為此開展動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)技術(shù)的研究,通過周期校準(zhǔn)保證動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)性能,以滿足生產(chǎn)需求和保障動(dòng)車組的運(yùn)營安全。
1 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)的組成
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)是具有焊接機(jī)座的框架結(jié)構(gòu),在此基礎(chǔ)上安裝了鐵軌和車輪測量單元,在結(jié)索中安裝有液壓測試汽缸,通過手輪可使其橫向移動(dòng)。具體組成如圖1所示。

1.測試汽缸 1;2.測試汽缸 2;3.輔助結(jié)索;4.設(shè)備基座;5.車輪測量單元C;6.車輪測量單元D;7.車輪測量單元A;8.車輪測量單元B;9.結(jié)索。
如圖2所示,動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)配備了控制箱和工業(yè)電腦,安裝了專用測試軟件,通過觸摸屏或鍵盤控制所有設(shè)備功能及機(jī)械測試。

圖2 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)控制箱和工業(yè)電腦
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)配備了液壓動(dòng)力裝置,通過可調(diào)節(jié)軸向柱塞泵調(diào)節(jié)設(shè)備壓力[2]。電子監(jiān)控系統(tǒng)可通過對油位和油溫進(jìn)行檢測防止油溫持續(xù)過熱;次級(jí)泄壓閥可有效防止液壓過大;內(nèi)置過濾器可防止設(shè)備污染,從而確保機(jī)器長期無故障運(yùn)行。液壓動(dòng)力裝置結(jié)構(gòu)如圖3所示。

圖3 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)液壓動(dòng)力裝置
2 校準(zhǔn)條件要求
2.1 環(huán)境要求
校準(zhǔn)環(huán)境要求如下:
(1) 校準(zhǔn)環(huán)境溫度為0~30 ℃;
(2) 校準(zhǔn)環(huán)境相對濕度≤80% RH;
(3) 校準(zhǔn)環(huán)境周圍無影響校準(zhǔn)結(jié)果的震源、電磁干擾和腐蝕性介質(zhì);
(4) 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)不得有影響校準(zhǔn)結(jié)果的外觀缺陷。
2.2 主要測量標(biāo)準(zhǔn)器要求
(1) 標(biāo)準(zhǔn)測力儀主要用于動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)力值的校準(zhǔn),要求精度等級(jí)為0.3級(jí)及以上;測量范圍應(yīng)覆蓋試驗(yàn)臺(tái)滿量程的要求;示值重復(fù)性相對誤差和長期穩(wěn)定度均不大于0.3%;示值進(jìn)程、回程相對誤差不大于1.5%。
(2) 激光干涉儀通過與不同的光學(xué)組件結(jié)合,可以實(shí)現(xiàn)對動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)直線度、垂直度、角度、平面度、平行度等多種幾何精度的測量,要求測量范圍不小于40 m,最大允許誤差為(0.5×10-6L) μm,線性分辨力為0.001 μm。
(3) 水準(zhǔn)儀用于測量動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)輪重單元高度差、聯(lián)軸節(jié)高度尺導(dǎo)軌高度差等,要求測微器最小分格值為0.05 mm,水準(zhǔn)管軸與視準(zhǔn)軸投影在垂直面上所形成的夾角誤差(以下簡稱i角誤差)不大于12″。
(4) 量塊用于聯(lián)軸節(jié)高度尺示值誤差的測量,精度等級(jí)為5等及以上可滿足校準(zhǔn)要求。
3 校準(zhǔn)項(xiàng)目
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)項(xiàng)目如表1所示。
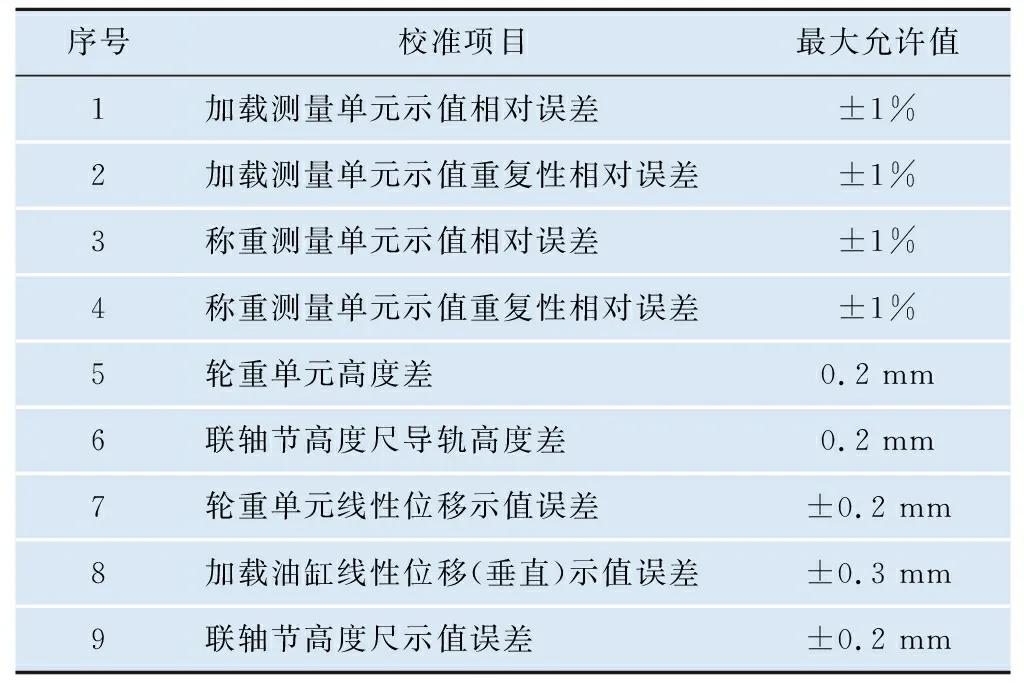
表1 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)項(xiàng)目
4 校準(zhǔn)方法
4.1 加載和稱重測量單元的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)加載和稱重測量單元校準(zhǔn)時(shí),選取校準(zhǔn)點(diǎn)不得少于5個(gè),一般按測量范圍的20%、40%、60%、80%、100%均勻分布選取。采用液壓式加載,校準(zhǔn)時(shí)將標(biāo)準(zhǔn)測力儀和試驗(yàn)臺(tái)的示值調(diào)至零點(diǎn),沿標(biāo)準(zhǔn)測力儀受力軸線逐點(diǎn)遞增施加試驗(yàn)力值,至校準(zhǔn)點(diǎn)保持穩(wěn)定后讀取進(jìn)程示值,校準(zhǔn)過程連續(xù)重復(fù)進(jìn)行3次,其校準(zhǔn)技術(shù)指標(biāo)計(jì)算方法如下:
示值相對誤差q按式(1)計(jì)算:
(1)

F——與力標(biāo)準(zhǔn)器示值對應(yīng)的試驗(yàn)力。
示值重復(fù)性相對誤差b按式(2)計(jì)算:
(2)
式中:Fimax、Fimin——分別為試驗(yàn)臺(tái)第i校準(zhǔn)點(diǎn)3次進(jìn)程示值的最大值和最小值;
4.2 輪重單元高度差的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)輪重單元高度差校準(zhǔn)時(shí),校準(zhǔn)點(diǎn)應(yīng)在輪重單元使用范圍內(nèi)均勻選取不少于2個(gè)點(diǎn)。校準(zhǔn)時(shí)將平尺和靶標(biāo)放置在稱重單元支撐輪上,分別測量每個(gè)輪重單元高度,測量的最大值和最小值之差即為輪重單元高度差。
4.3 聯(lián)軸節(jié)高度尺導(dǎo)軌高度差的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)聯(lián)軸節(jié)高度尺導(dǎo)軌高度差校準(zhǔn)時(shí),校準(zhǔn)點(diǎn)應(yīng)在輪對軸距方向使用范圍內(nèi)均勻選取不少于3個(gè)點(diǎn),校準(zhǔn)時(shí)將水準(zhǔn)儀固定安裝,并調(diào)試至水平,將靶標(biāo)放置在被測軌道使用點(diǎn)上,通過水準(zhǔn)儀讀取數(shù)值并記錄,測量的最大值和最小值之差即為聯(lián)軸節(jié)高度尺導(dǎo)軌高度差。
4.4 輪重單元線性位移的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)輪重單元線性位移校準(zhǔn)時(shí),校準(zhǔn)點(diǎn)應(yīng)在其使用量程范圍內(nèi)均勻選取不少于4個(gè)點(diǎn),校準(zhǔn)時(shí)將輪重單元在導(dǎo)軌上移動(dòng),將移動(dòng)的距離與激光干涉儀顯示距離進(jìn)行比較,其差值即為輪重單元線性位移示值誤差。
4.5 加載油缸線性位移(垂直)的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)加載油缸線性位移(垂直)校準(zhǔn)時(shí),校準(zhǔn)點(diǎn)應(yīng)在其使用范圍內(nèi)均勻選取不少于3個(gè)點(diǎn),校準(zhǔn)時(shí)將橫梁由上向下移動(dòng),將移動(dòng)的距離與激光干涉儀顯示距離進(jìn)行比較,其差值即為加載油缸線性位移(垂直)示值誤差。
4.6 聯(lián)軸節(jié)高度尺示值誤差的校準(zhǔn)
動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)聯(lián)軸節(jié)高度尺示值誤差校準(zhǔn)時(shí),校準(zhǔn)點(diǎn)應(yīng)在其測量范圍內(nèi)均勻選取不少于3個(gè)點(diǎn),校準(zhǔn)時(shí)使用5級(jí)及以上量塊,在每個(gè)選取的測量點(diǎn)讀取尺身讀數(shù)并記錄,其測量值與量塊標(biāo)稱值之差即為聯(lián)軸節(jié)高度尺示值誤差。
由上圖6可見,方法1其色譜圖的分離程度不高,方法2色譜圖的峰形較好,因此選擇第二種方法進(jìn)行進(jìn)一步的優(yōu)化。
5 測量不確定度評定
校準(zhǔn)測量結(jié)果是否準(zhǔn)確,通常根據(jù)被測量和測量值的誤差來描述,然而被測量的真值不是已知的,所以準(zhǔn)確定量的難度很大。測量不確定度是與測量結(jié)果關(guān)聯(lián)的一個(gè)參數(shù),用于表征合理賦予被測量值的分散性,是對測量結(jié)果質(zhì)量和水平的科學(xué)表達(dá),可以評價(jià)校準(zhǔn)方法的合理性。動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)的校準(zhǔn)同樣需要給出測量不確定度的評價(jià)[3]。
5.1 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)線性位移定位精度測量結(jié)果的不確定度評定
5.1.1 評定方法
在環(huán)境溫度在10~35 ℃、相對濕度不大于80%的條件下,將激光干涉儀(最大允許誤差為±(0.5×10-6L) μm)反光鏡固定在導(dǎo)軌桁架上,激光發(fā)射方向與導(dǎo)軌運(yùn)行方向相同。零位同時(shí)清零后,每運(yùn)行50 mm,導(dǎo)軌系統(tǒng)與激光干涉儀分別記錄一次數(shù)據(jù),導(dǎo)軌系統(tǒng)記錄的數(shù)據(jù)減去激光干涉儀的數(shù)據(jù)即為該位置的定位精度,建立數(shù)學(xué)模型如式(3)所示:
ΔL=L-L0
(3)
式中:ΔL——導(dǎo)軌定位精度;
L——被測位置導(dǎo)軌系統(tǒng)讀數(shù);
L0——被測位置激光干涉儀讀數(shù)。
5.1.2.1測量重復(fù)性引入的標(biāo)準(zhǔn)不確定度μ1的評定
在重復(fù)性條件下對400 mm尺寸連續(xù)測量10次,測量值分別為400.07 mm、400.05 mm、400.07 mm、400.07 mm、400.04 mm、400.08 mm、400.05 mm、400.07 mm、400.09 mm、400.11 mm。單次試驗(yàn)標(biāo)準(zhǔn)偏差s為:
式中:Li——第i次被測位置導(dǎo)軌系統(tǒng)讀數(shù);
n——連續(xù)測量次數(shù),n=10。
則μ1=s=0.020 5 mm。
5.1.2.2激光干涉儀示值誤差引入的標(biāo)準(zhǔn)不確定度μ2的評定
激光干涉儀本身精度受環(huán)境的影響變化可以忽略不計(jì),還可根據(jù)被檢導(dǎo)軌的環(huán)境變化進(jìn)行數(shù)據(jù)的修正,因此不考慮溫度對測量結(jié)果的影響。
5.1.3 合成不確定度評定
5.1.3.1主要測量標(biāo)準(zhǔn)不確定度分量
線性位移定位精度主要測量標(biāo)準(zhǔn)不確定度分量如表2所示。

表2 線性位移定位精度主要測量標(biāo)準(zhǔn)不確定度分量
5.1.3.2合成標(biāo)準(zhǔn)不確定度μc
以上各項(xiàng)標(biāo)準(zhǔn)不確定度分量相互獨(dú)立不相關(guān),則:
5.1.3.3擴(kuò)展不確定度U
取置信因子k=2(置信概率為95%),當(dāng)L=400 mm時(shí),U=0.02×2=0.04 mm。
5.2 動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)測力示值誤差測量結(jié)果的不確定度評定
5.2.1 評定方法
在規(guī)定環(huán)境條件下,用0.1級(jí)標(biāo)準(zhǔn)測力儀對動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)進(jìn)行直接測量,可得到與標(biāo)準(zhǔn)值相對應(yīng)的試驗(yàn)臺(tái)負(fù)荷示值。該過程連續(xù)進(jìn)行3次,3次示值的算術(shù)平均值與標(biāo)準(zhǔn)測力儀示值之差,即得到該測量點(diǎn)的示值誤差,建立數(shù)學(xué)模型如式(4)所示:
(4)
式中:Δ——測量單元的示值誤差。
5.2.2 輸入量的標(biāo)準(zhǔn)不確定度評定
5.2.2.1測量重復(fù)性引入的標(biāo)準(zhǔn)不確定度μ1
對轉(zhuǎn)向架綜合試驗(yàn)臺(tái)100 kN點(diǎn)進(jìn)行測量,在重復(fù)條件下連續(xù)測量10次,測量結(jié)果分別為100.30 kN、100.26 kN、100.27 kN、100.27 kN、100.28 kN、100.24 kN、100.29 kN、100.23 kN、100.24 kN、100.29 kN。
通過計(jì)算得到標(biāo)準(zhǔn)偏差為0.024 kN,3次平均值的標(biāo)準(zhǔn)偏差為0.014 kN,則測量重復(fù)性帶來的標(biāo)準(zhǔn)不確定度分量μ1=0.014 kN。
標(biāo)準(zhǔn)偏差s(x)為:
則測量重復(fù)性帶來的標(biāo)準(zhǔn)不確定度分量μ1=0.014 kN。
5.2.2.2標(biāo)準(zhǔn)測力儀示值誤差引入的標(biāo)準(zhǔn)不確定度μ2
5.2.3 合成不確定度評定
5.2.3.1主要測量標(biāo)準(zhǔn)不確定度分量
測力示值誤差主要測量標(biāo)準(zhǔn)不確定度分量如表3所示。

表3 測力示值誤差主要測量標(biāo)準(zhǔn)不確定度分量
5.2.3.2合成標(biāo)準(zhǔn)不確定度μc
由于以上各量彼此獨(dú)立,互不相關(guān),則:
5.2.3.3擴(kuò)展不確定度U

6 結(jié)束語
經(jīng)過實(shí)踐證明,上述動(dòng)車組轉(zhuǎn)向架靜載試驗(yàn)臺(tái)校準(zhǔn)的方法切實(shí)可行,檢測及校準(zhǔn)精度滿足預(yù)期使用的要求,滿足設(shè)備現(xiàn)場校準(zhǔn)、校準(zhǔn)設(shè)備安裝攜帶方便、測量準(zhǔn)確度高、檢測數(shù)據(jù)處理簡單快捷等技術(shù)要求和特點(diǎn),適合在軌道交通領(lǐng)域廣泛應(yīng)用。該項(xiàng)校準(zhǔn)技術(shù)研究,也填補(bǔ)了高速列車產(chǎn)業(yè)校準(zhǔn)技術(shù)領(lǐng)域的空白,有力支撐了高速列車產(chǎn)業(yè)計(jì)量的創(chuàng)新發(fā)展。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術(shù)與機(jī)床(2019年12期)2020-01-06 03:17:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
當(dāng)代陜西(2019年8期)2019-05-09 02:22:48
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
動(dòng)漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
西南交通大學(xué)學(xué)報(bào)(2018年5期)2018-11-08 10:58:26
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
