基于固定時間預設性能的汽車電子節氣門伺服控制
2022-01-13 03:16:36萬春雨焦曉紅
燕山大學學報 2022年1期
萬春雨,焦曉紅
(燕山大學 電氣工程學院,河北 秦皇島 066004)
0 引言
汽車電子節氣門是發動機控制系統中的重要部件,進入發動機氣缸中的空氣量多少取決于節氣門閥片的開度,從而影響到汽車的動力特性。為了提高汽車的駕駛舒適性、燃油經濟和尾氣排放等方面的性能,電子節氣門系統要求較高精度和動態性能的閥片位置跟蹤控制。因此,關于電子節氣門系統控制的研究工作一直在進行著。
近年來,許多控制算法被應用于汽車電子節氣門控制設計。較早采用的方法是改進的PID控制[1-3]。文獻[1]利用神經網絡識別電子節氣門系統,與PID控制相結合設計控制器。文獻[2]針對電子節氣門系統設計了一種模糊PID控制器,通過對目標函數的優化來實現控制器參數的調節。文獻[3]通過增加積分項設計擴張電子節氣門系統等效為PID控制器,并應用自適應技術來自動調節控制器參數,提高了控制系統的魯棒性。除此之外,還有很多控制算法被應用到電子節氣門控制系統中。文獻[4]利用魯棒自適應滑模控制策略,消除了系統非線性特性的影響。文獻[5]針對具有高增益不確定性的非線性系統,提出了一種基于自適應動態滑模和擴展狀態觀測器的汽車電子節氣門魯棒跟蹤控制。文獻[6]基于模糊神經網絡,提出了一種魯棒自適應智能控制方法來實現節氣門開度控制。2008年,希臘Bechlioulis等學者提出了一種稱為預設性能控制[7]的方法,用來解決非線性系統性能約束的問題。因為預設性能控制策略可以通過預先設定系統設計參數來實現系統的暫穩態性能要求,所以預設性能控制成為了熱門研究方向。文獻[8]基于預設性能控制策略對具有全狀態約束的不確定非線性系統進行控制器設計。文獻[9]將自適應控制技術與預設性能控制理論相結合,設計了一種基于神經網絡的非線性系統輸出反饋容錯控制器。文獻[10]針對不確定非線性系統設計了一種有限時間預設性能伺服控制器,確保跟蹤誤差在有限時間內收斂到預定義內。文獻[11]將預設性能理論應用到了電子節氣門系統中,設計了一種自適應預設性能控制器。但隨著對發動機的燃料經濟和排放性能的更高要求,在實際控制中進一步提高發動機的響應能力也是十分重要的,需要尋找能夠保障更快響應的控制方法。因此考慮到固定時間穩定性理論在許多方面得到了應用[12-15]。文獻[12]對一類嚴格反饋的不確定非線性系統進行可預先確定的固定時間控制。文獻[13]研究了具有參數不確定性和外部擾動的航天器繞飛定時跟蹤和姿態同步控制問題。近期關于固定時間預設性能控制器的設計研究也有了成果,文獻[14]針對一類具有擾動和執行器飽和的二階非線性系統,提出了一種預設性能固定時間跟蹤控制方法。文獻[15]針對不確定非線性系統進行了固定時間預設性能遞歸神經網絡控制器設計。同時,考慮到電子節氣門輸入電壓在實際中的限制條件,控制器的飽和約束性也是一個需要重視的問題。文獻[16]針對一類不確定非線性系統,通過引入輔助函數補償輸入飽和的影響,進行自適應跟蹤控制。文獻[17]采用相似的方法,針對具有輸入飽和約束的電子節氣門系統進行自適應滑模控制。
基于以上分析,本文基于預設性能控制策略和固定時間穩定性理論,針對電子節氣門系統的非線性特性和飽和特性,提出了一種預設性能固定時間控制策略,用以提高系統節氣門開度軌跡跟蹤的瞬態響應和穩態響應,通過對控制設計參數的選取,保證系統在固定時間內收斂到預定域內,同時,通過引入輔助函數來解決控制輸入飽和的問題。
1 電子節氣門系統
1.1 系統數學模型
電子節氣門系統包括發動機電子控制單元(Electronic Control Unit,ECU)、直流電機驅動器、電子節氣門體和油門踏板等結構。其中節氣門體包括直流電機、電壓位置傳感器、減速齒輪組、節氣門閥片和反向彈簧,其結構如圖1所示。
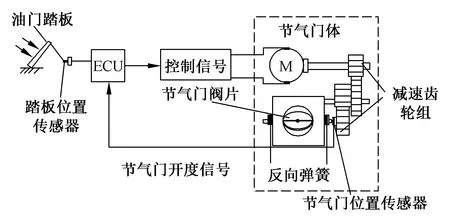
圖1 電子節氣門體結構原理圖Fig.1 Structural schematic of the electronic throttle
當踏板位置傳感器將駕駛員意圖傳遞給發動機ECU,控制單元結合當前路況、車速等因素進行綜合分析得到所需期望信號,然后通過控制算法程序將期望信號與節氣門位置傳感器采集的閥片當前實際開度信號進行處理,從而得到了驅動電機旋轉的脈寬調制(Pulse Width Modulation,PWM)電壓信號,直流電機通過減速齒輪箱和反向彈簧的作用帶動節氣門閥片進行翻轉達到并維持在最佳開度位置上,此時ECU再次收集節氣門位置傳感器反饋回來的當前開度信號。因此,形成了電子節氣門系統的閉環控制。
根據電子節氣門的機電特性,系統的動力學方程為
(1)
式中,u(v)為電機輸入電壓,ia為電樞繞組電流,R和L分別為電機電樞電阻和電感,Ke為電機反電動勢常數,ωm和ω分別為電機角速度和節氣門閥片角速度,θ為節氣門閥片開度,Jm和Bm分別為電機軸側轉動慣量和電機軸黏性摩擦常數,Jt和Bt分別為閥片側轉動慣量和閥片側黏性摩擦常數,Kt為電機轉矩常數,Tm和Tl分別為電機軸負載轉矩和齒輪組輸出轉矩,TL為負載轉矩,包括擾動轉矩,Tf和Tsp分別為節氣門摩擦力轉矩和反向彈簧轉矩,描述為
Tf(ω)=Fcsgn(ω),
(2)
Tsp(θ)=TLHsgn(θ-θ0)+ks(θ-θ0),
(3)
其中,Fc為靜態摩擦系數,TLH和ks分別為彈簧預緊力矩和扭矩系數,θ0為節氣門跛行回家角。
考慮到控制器實際應用,系統(1)中輸入電壓u(v)受到以下形式的飽和約束:
(4)
其中,Umax和Umin是u(v)的界值,為已知常數,v是實際輸入電壓值。
另外,由于電機電樞值非常小,因此可以忽略掉電流部分的動態特性,可以得到電子節氣門系統的數學模型:
(5)

1.2 控制問題
為了使節氣門開度θ跟蹤期望信號θr,系統獲得到更好的暫態和穩態跟蹤性能,本文基于固定時間穩定性理論,同時結合預設性能控制策略,設計滿足以下條件的控制器:
1)在任何運行工況和參考信號變化的條件下,系統的調節時間要求小于100 ms[3]。
2)穩態跟蹤誤差小于0.11°[3]。
3)系統的跟蹤誤差被限定在預設性能函數上下界之間,本文選取如下有限時間預設性能函數[10]:
(6)
4)所設計的控制器符合實際應用中對系統控制輸入的物理限制安全條件。
2 預設性能固定時間控制
在本節中,我們將設計一個預設性能固定時間控制器,首先給出固定時間穩定性理論的定義以及設計過程中所需要的引理。
引理1[12]考慮如下系統

(7)
其中,x∈Rn,f(x):U0→Rn在原點的開鄰域內是連續的。假設系統(7)對于所有初始條件,在正向時間內具有唯一解。
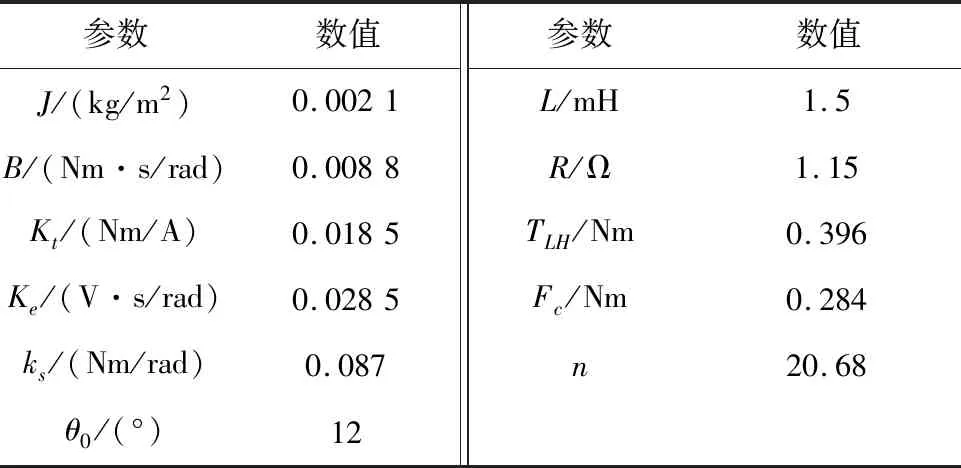
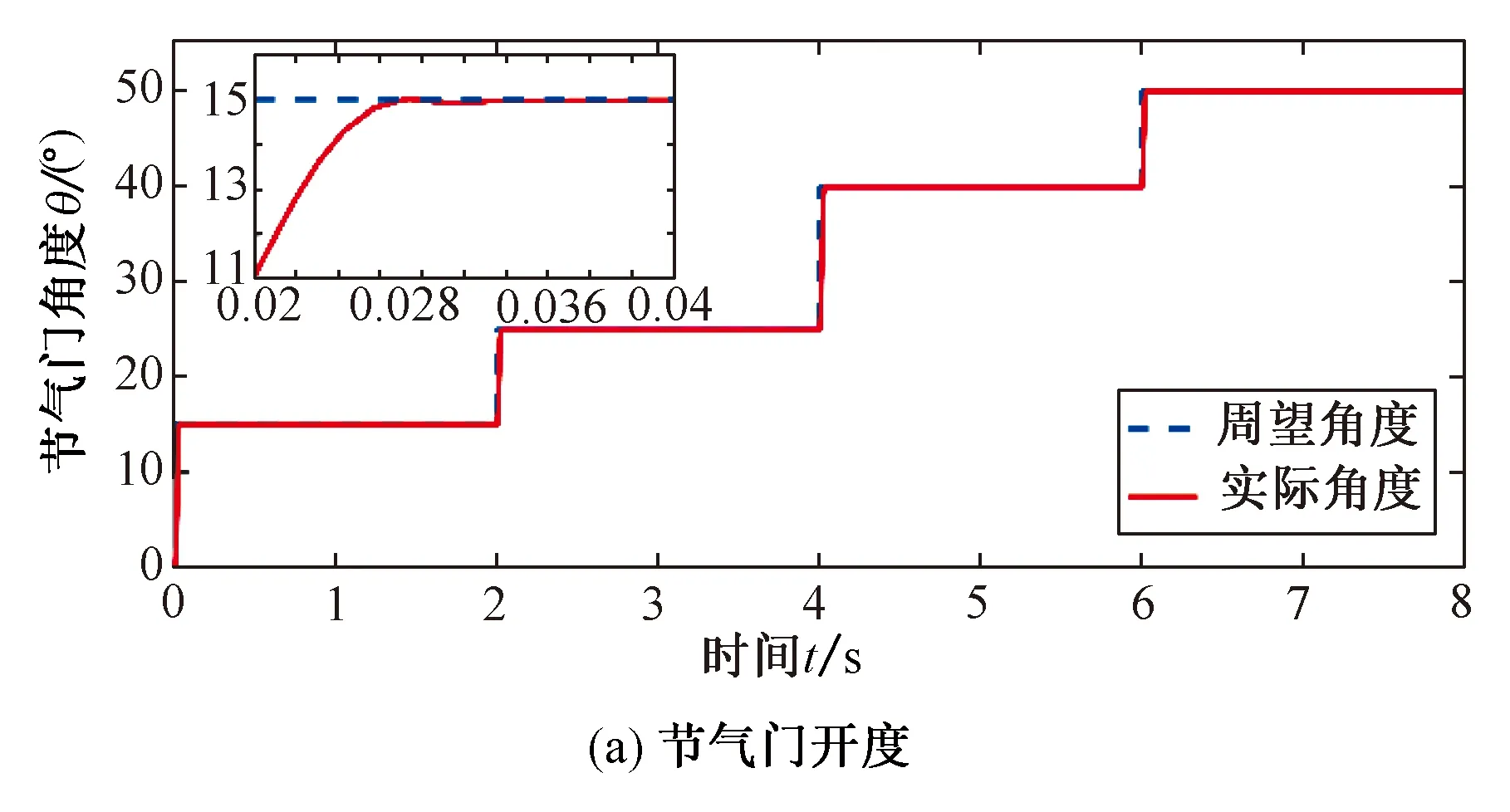
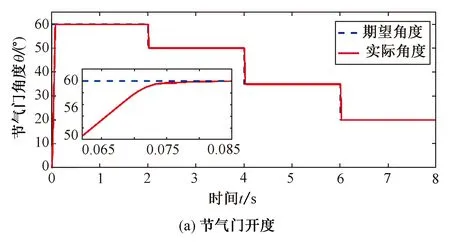
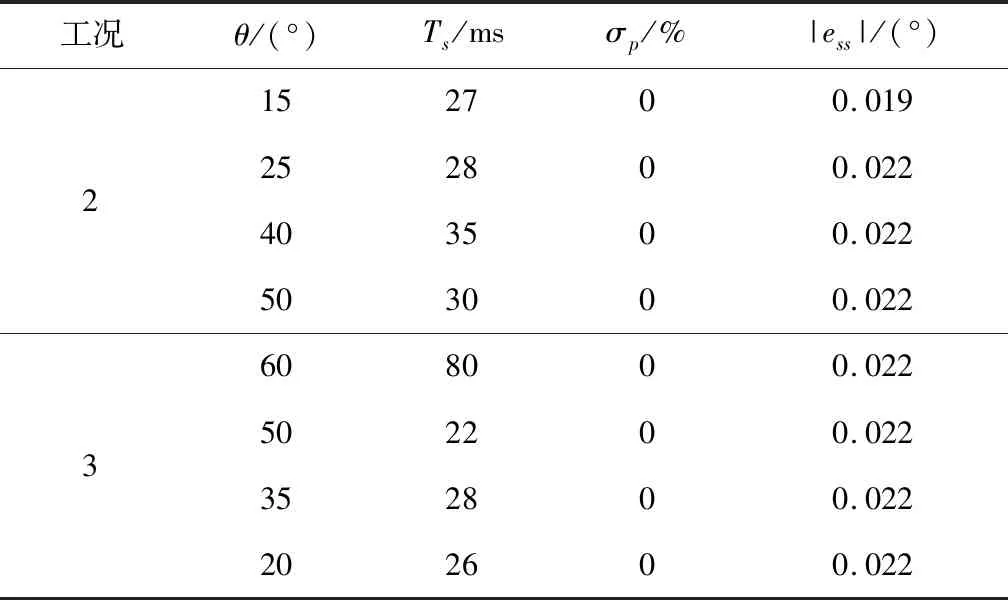
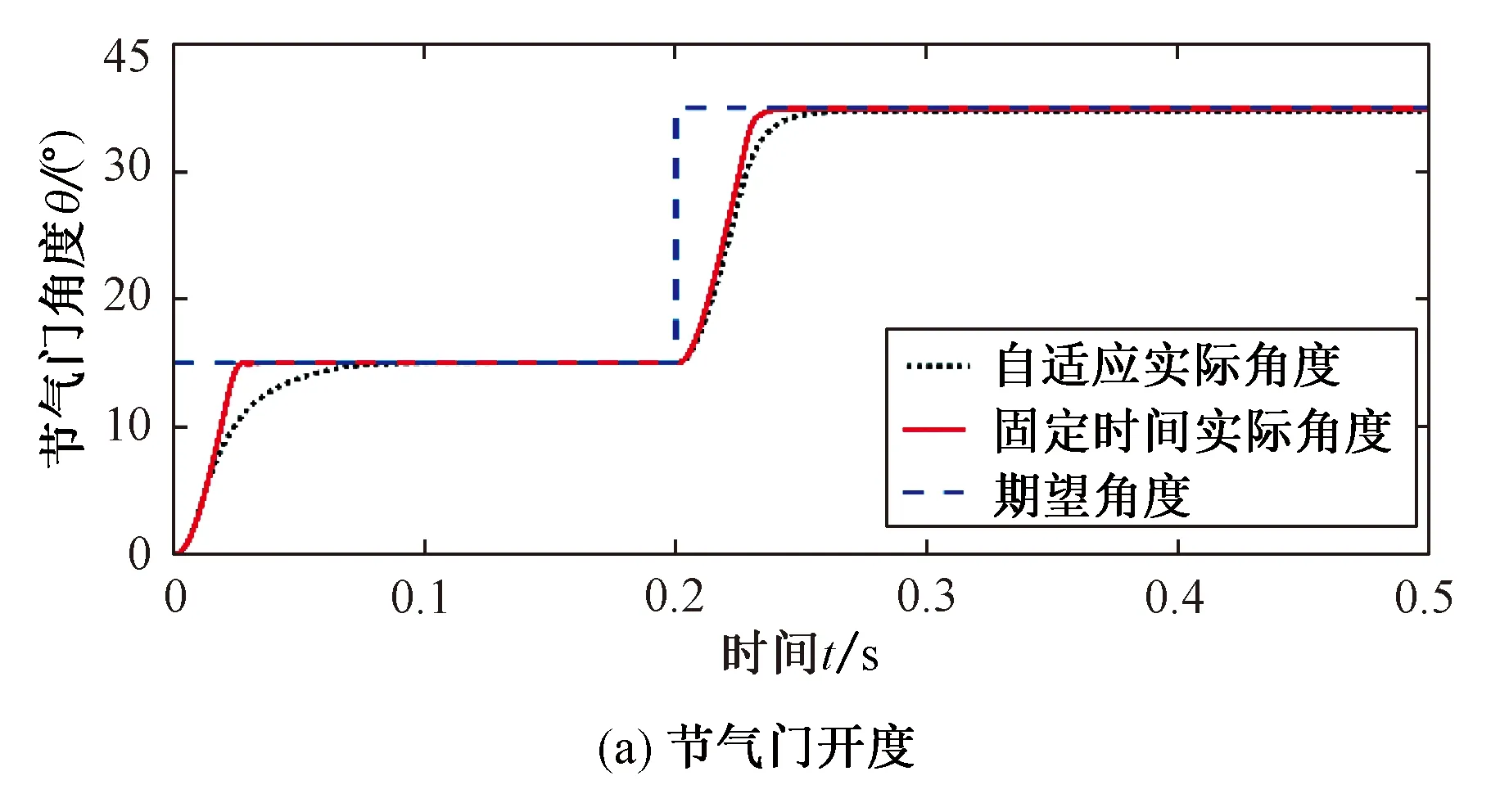
對任意實數α,β>0,p>1,0 (8) 則系統(7)是全局固定時間穩定的,并且穩定時間函數有界為 (9) 引理2對任意實數xi(i=1,2,…,n),并且有實數0 (|x1|+…+|xn|)q≤|x1|q+…+|xn|q, (10) 其中,q=q1/q2,且q1和q2均為正奇數。 引理3對任意實數xi(i=1,2,…,n),并且有實數p>1,則下列不等式成立 (11) 定義如下轉換誤差函數 ψ(ε(t))=e(t)/ρ(t), (12) 其中,-δ1<ψ(ε(t))<δ2,δ1和δ2為正的可調參數,ψ(ε(t))選擇為 (13) 則有 (14) 根據跟蹤誤差e(t)=θr-θ,通過坐標變換,將原系統數學模型轉換成如下形式: (15) Step 1:首先定義z=ω-α,選擇李雅普諾夫函數為 (16) 對V1求時間導數得 (17) 設計虛擬控制器為 (18) 其中,k11、k12、p、q為正的設計參數,并且p>1,0.5 (19) Step 2:通過引入輔助設計函數η來處理控制器飽和約束性問題[16] (20) 其中,Δu=u-v,k4>0是一個可調參數,σ是一個很小的常數,N>b>0。 因此,選擇李雅普諾夫函數為 (21) 可以得到 z(-a1θ-a2ω+a3+bu(v)- (22) z(-a1θ-a2ω+a3+b(v+Δu)- (23) 因此,選擇控制器為 βε+a1θ+a2ω-a3+c1sgn(θ-θ0)+ (24) 其中,k21、k22、k3為正的設計參數,將式(24)代入式(23)得到 (25) (26) 根據引理2和引理3,選擇k1=min{k11,k21,1},k2=min{k12,k22,1},可得 (27) 此時由引理1可知,系統(13)是全局固定時間穩定的,并且保證收斂時間范圍為 (28) 定理1對于帶有飽和約束(4)的電子節氣門系統(1),設計了一個預設性能固定時間控制器(24),則閉環系統的跟蹤誤差能夠在固定時間內進入預定義穩態,并在輔助函數(20)的作用下解決了系統輸入飽和約束的問題。因此,所得到的控制器滿足性能要求。 為了驗證本文所提出的控制策略的有效性和優越性,在MATLAB/Simulink環境下進行了仿真驗證。電子節氣門系統的模型數如表1所示[3]。 表1 節氣門系統參數Tab.1 Throttle system parameters 本文考慮了如下3種工況,并考慮系統的負載干擾為TL=0.1 sin (2πt): Case1:節氣門期望輸出信號為單個階躍信號; Case2:節氣門期望輸出信號為不同幅值遞增變化的階躍信號組成; Case3:節氣門期望輸出信號為不同幅值遞減變化的階躍信號組成。 在仿真中,為了使控制器獲得良好的控制性能,對可調控制參數的選取進行如下思考。通過預設性能函數的坐標變換,轉換誤差ε的初始值與期望角度的初始值有很大的關系,參數k11和k12關系著控制系統的響應速度,保證系統的跟蹤誤差被限定在預設性能函數界內,因此不宜過大。而參數k21和k22對控制系統的穩態誤差有很大影響,若選取不合適則會出現超調。 綜合上述理論分析,控制器可調參數選為:p=99/97,q=97/99,k11=1,k12=450,k21=0.1,k22=7 500,k3=1,k4=1。在上述3種工況下,帶有所設計控制器的電子節氣門系統的運行仿真曲線分別如圖2~4所示。 從圖2可以看出,節氣門開度在單個階躍信號運行時,系統跟蹤誤差響應曲線始終在性能函數界內,調節時間約為60 ms,且無超調,穩態誤差幾乎為零,在輔助函數η的作用下控制電壓始終保持在±12 V之間,滿足系統實際要求。 圖2 工況1下的仿真結果Fig.2 Simulation result in case 1 從圖3可以看出,節氣門開度以不同幅值遞增變化運行時,系統輸出跟蹤誤差響應曲線始終在性能函數界內,調節時間約為30 ms,且無超調,穩態誤差幾乎為零,控制電壓在±12 V之間,滿足實際要求。 圖3 工況2下的仿真結果Fig.3 Simulation result in case 2 從圖4可以看出,節氣門開度以不同幅值遞減變化運行時,系統輸出跟蹤誤差響應曲線始終在性能函數界內,調節時間約為80 ms,超調和穩態誤差幾乎為零,控制電壓在±12 V之間,滿足實際要求。 圖4 工況3下的仿真結果Fig.4 Simulation result in case 3 為了方便分析仿真運行結果,表2總結了工況2和工況3下系統的暫態性能和穩態性能。從表中可以看出,在此種控制策略下調節時間很短,最大不超過80 ms,穩態誤差極小,且沒有超調。 表2 工況2和工況3仿真下的暫態和穩態性能Tab.2 Transient and static performance in simulation case 2 and case 3 為了驗證所提出的固定時間預設性能控制器在改善系統暫態性能方面的優越性,與文獻[11]的自適應預設性能控制器進行對比。選取幅值變化的階躍信號為參考信號,仿真結果如圖5所示。 由圖5可知,系統輸出跟蹤誤差和控制電壓始終滿足性能要求,本文提出的固定時間預設性能控制方法具有更快的響應速度,調節時間更短。 圖5 本文控制器與自適應預設性能控制器對比仿真結果Fig.5 The simulation result of the proposed controller and the adaptive prescribed performance controller 通過以上3種典型工況運行情況以及對比仿真結果分析可知,所設計的預設性能固定時間控制器能夠使系統獲得良好的暫態性能和穩態性能,滿足系統在實際應用中的要求。 本文設計了一種針對汽車電子節氣門系統的預設性能固定時間控制器,克服了節氣門系統的非線性特性,并且改善了節氣門閥片位置跟蹤的精度和響應速度。在控制器設計中,將預設性能控制策略集成到固定時間穩定性理論框架中,通過對控制設計參數的選取,優化了控制器的暫穩態跟蹤性能。并且通過設計的輔助系統處理輸入飽和受限的問題,使電子節氣門系統擁有更好的穩態性能。仿真結果表明,在不同工況的情況下,該控制策略能夠有效跟蹤參考信號,對運行過程中參數的變化和負載擾動具有較強的魯棒性。


3 仿真驗證

4 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58現代裝飾(2020年7期)2020-07-27 01:27:42流行色(2020年1期)2020-04-28 11:16:38裝備制造技術(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(2019年4期)2019-05-11 09:27:34藝術啟蒙(2018年7期)2018-08-23 09:14:18家庭影院技術(2017年9期)2017-09-26 03:41:45海峽姐妹(2017年7期)2017-07-31 19:08:17
