蜘蛛機器人梯度投影法的運動分析和仿真
2022-01-13 03:34:30楊書麟
機械設計與制造 2021年12期
唐 軍,秦 智,楊書麟
(江西理工大學機電工程學院,江西 贛州 341000)
1 引言
仿生機器人功能強大、可靠性高、應用廣泛,使得該領域成為中國制造2025關注的熱點。因爬行類機器人具有獨立的支撐點而使得爬行機器人的機動性、可靠性比輪式或履帶式機器人高,在惡劣環境中四足機器人可以代替人類開展救災、滅火、核輻射區救援等專項工作。因此,對仿生足式機器人的運動和控制研究,具有較強的現實意義[1]。
20 世紀60 年代初,國外科學家開始致力于腿式結構機器人的研究,文獻[2]研制出兩自由度簡單對角線爬行的“Phoney pony”機器人。隨后文獻[3]仿照哺乳動物研制出簡單機械結構的四足機器人,文獻[4]公司的研究人員開發出在崎嶇道路快速行走的可承載較高載荷的四足步行機器人[5]。國內,文獻[6]開發了伺服電機驅動的三自由度機器人JTUWM-III;文獻[7]開發了TIM1 仿哺乳動物四足機器人;文獻[8]研制了電力驅動大型四足機器人。但是,以上研究和開發的四足機器人體積龐大、慣性大、控制困難[9-12]。針對以上問題,這里設計了一款慣性小、體積小、移動可靠、易于控制的仿生四足機器人。當它運動時,足部運動的控制精度成為判定機器人性能的關鍵,而機身各關節的角位移、轉矩、接觸力是軀體控制的關鍵點。因此,通過機器人關節變量和運動軌跡的關系進行仿真模擬,找出爬行四足機器人的控制方程,并利用梯度投影算法求解,驗證設計結構的合理性。
2 蜘蛛類生物結構及運動特性
昆蟲種類繁多,不同的昆蟲身體構造和運動方式有明顯差異,以蜘蛛類昆蟲為例,其身體構造,如圖1所示。
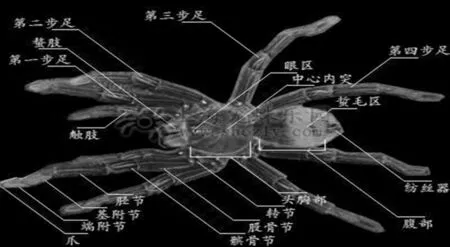
圖1 蜘蛛結構圖Fig.1 Spider Structure
蜘蛛每條腿的結構分布相似,均由六個關節組成,六個關節依次為端附節、基附節、脛節、髕骨節、股骨節、轉節。由于端附節、基附節、髕骨節的相對較短,脛節、股骨節、轉節較長,這樣可以使腿部運動更加靈活,在運動時能起到主導作用。蜘蛛類昆蟲一般采取直線型的靜態運動方式,運動時都采用腿部交叉的運動方式,第一步足、第三步足、第五步足運動,第二步足、第四步足、第六步足處于靜止狀態,結構上維持三角形來保持身體平衡。端附節、基附節、髕骨節以及爪的轉動幅度較小,軀體運動主要通過脛節、股骨節、轉節橫擺轉動,其余關節運動可忽略不計。
3 四足爬行機器人的結構分析
通過分析蜘蛛類昆蟲的身體結構及運動方式可知,端附節、基附節、髕骨節轉動幅度較小。為了方便機器人的關節設計,將轉動較小的關節自由度去掉并對腿部數量進行選擇,從而確定四足仿生機器人的單腿三自由度結構,四足爬蟲機器人仿照蜘蛛運動機理,機器人腿部結構,如圖2所示。將腿部結構分為三節式,轉節、股骨節、脛節的連接采用正交連接方式,三關節采用舵機驅動模式實現繞軸旋轉,實現三關節多角度運動。
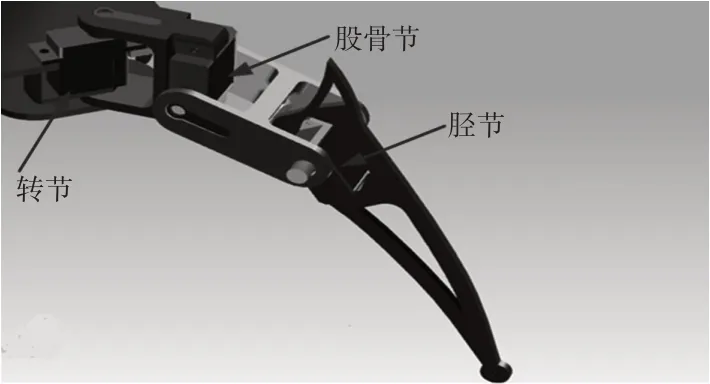
圖2 機器人腿部結構圖Fig.2 Robot Leg Structure
四足爬蟲機器人的結構原理圖與模型圖,如圖3、圖4所示。圖3各條腿的轉節用字母K1、K2、K3、K4表示,股骨節用字母X1、X2、X3、X4表示,脛節用字母H1、H2、H3、H4表示,腿尖用字母f1、f2、f3、f4表示,腿的具體編號用Leg1、Leg2、Leg3、Leg4 表示,轉節K1旋轉產生角位移推動股骨節產生位移,股骨節X1旋轉產生一定角位移推動脛節的方位發生變化,脛節H1旋轉改變f1的橫向位移,轉關節K1、股骨節X1、脛節H1的角位移量的矢量和構建出爬蟲機器人單腿足尖f1的運動軌跡。Leg2機構各關節運動前后驅使機架產生角位移θ2,機身逆時針產生總角位移α,Leg3機構前后共產生角位移-α驅使機身順時針偏轉,機身結構豎直方向相對之前位置前進位移l,因此,機身前進位移l為四足爬蟲機器人的單元擺動前進位移。四足爬蟲步態規劃簡圖,如圖5所示。
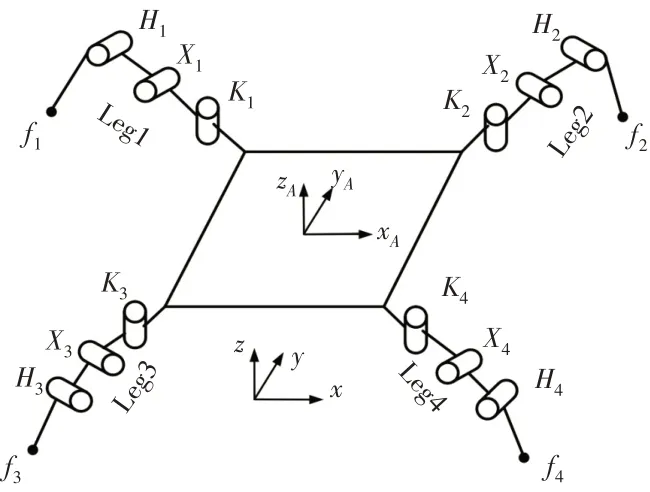
圖3 機器人結構圖Fig.3 Robot Structure Diagram
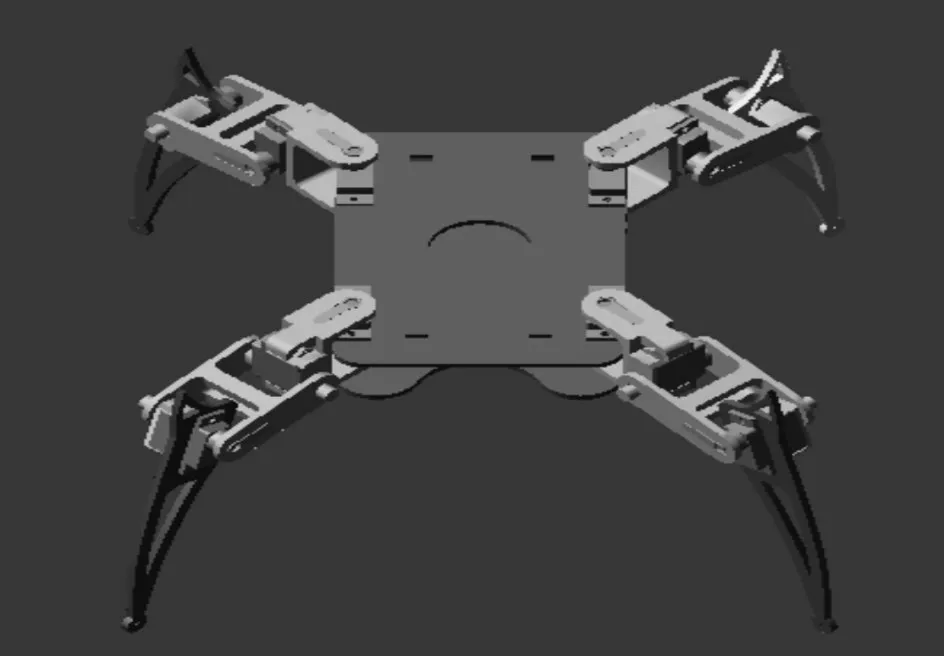
圖4 爬蟲機器人Fig.4 Reptile Robot
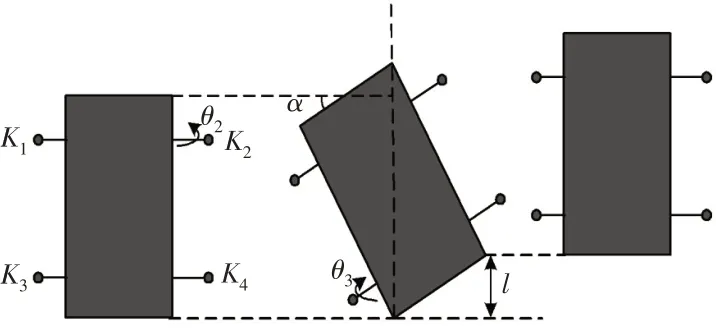
圖5 機器人步態規劃簡圖Fig.5 Robot Gait Planning Sketch
4 運動學模型的建立
4.1 單腿MDH運動方程建立
為了便于對機器人足部軌跡研究控制和關節分析,可將機器人的各個關節的銜接處的長度忽略不計,利用MDH方法(modified Denavit-Hartenberg)建立機器人運動學方程,即機器人的腿部MDH 模型。腿部MDH 模型,如圖6 所示。對機器人左前腿(FL)建立關節坐標系。
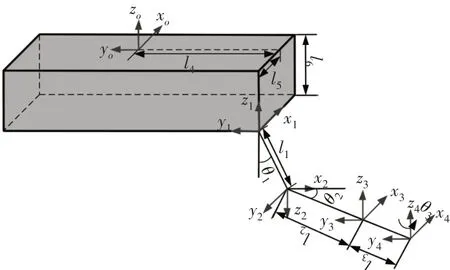
圖6 機器人的腿部機構MDH坐標系Fig.6 Robot Leg Mechanism MDH Coordinate System
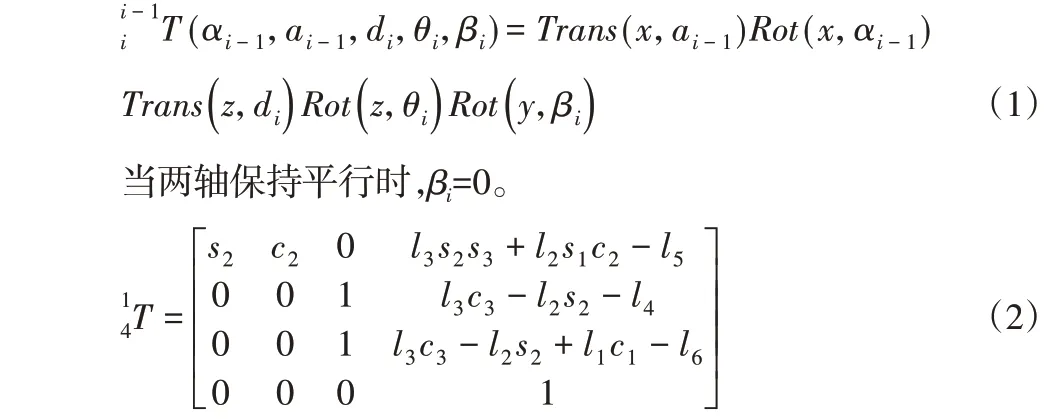
機器人左前腿的結構參數,如表1所示。基于MDH模型在扭角αi-1、連桿長度ai-1、偏距di、關節角θi,為了解決D-H法僅能應用于兩軸近乎平行的缺陷,引入附加轉動項Rot(y,βi)來修正關節坐標系變換引起的偏差。機器人腿部關節變換矩陣為:
由此可得到機器人足端f相對于坐標軸oo-x0y0z0的坐標向量[fx fy fz]T為:

機器人左腿MDH的參數表,如表1所示。
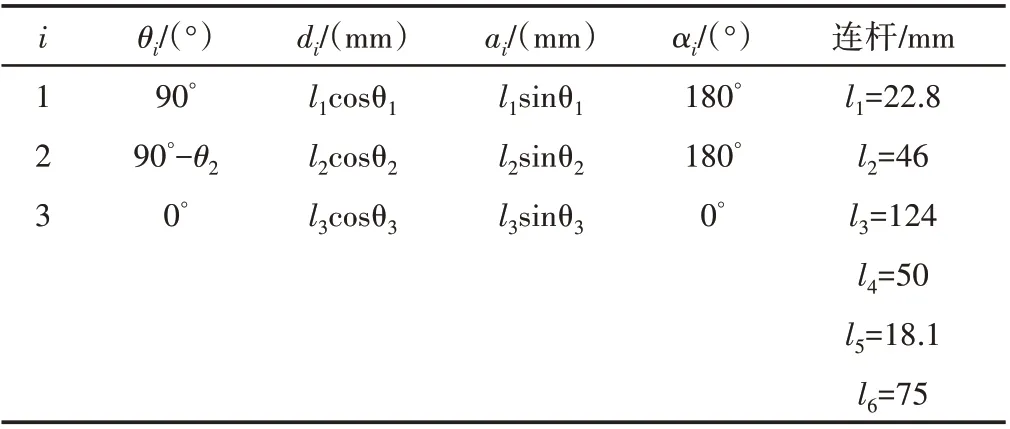
表1 左腿MDH的參數表Tab.1 Parameter Table of Left Leg MDH
由表1可知,可得出機器人各連桿的坐標系之間的關系,根據機器人運動學坐標系的建立方式,可依次確定第i根連桿的齊次坐標變換矩陣Ti-1。下列字母l1-大腿長度、l2-膝骨長度、l3-小腿長度,l5、l6表示距離機器人質心的距離,s1=sinθ1,c1=cosθ2。
祖父家鄉觀念重。那時廣東在外謀生的人不少,喜歡聚集而居,互相往來以廣東人自豪。祖父八個兒子找的全是廣東媳婦。二伯父病重,祖父從廣東找來一個女孩給他結婚沖喜,未等圓房二伯父就死了。祖父很傷心,準備將這個兒媳當女兒嫁出去,但她堅決不離開我們家,于是祖父在廣東老家為我的這位二伯母立了貞節牌坊,并給她抱養了個兒子。兒子長大,祖父送他去國外留學,豈料染上肺病,回國不久就病故了。二伯母悲嘆自己命太硬,把保姆當作養女,一直在廬山居住,活到97歲,故后葬在廬山。
4.2 四足爬蟲機器人腿部步態規劃
為了近似描述四足機器人的運動軌跡,滿足機器人運動平穩,能適應崎嶇道路行走且保持足尖與地面接觸時速度和加速度為零的特點,可采用一種修正后的復合擺線的軌跡方程,其足尖在x方向的軌跡方程為:

式中:S0-單位擺動前進位移;Ty-單位運動周期;H0-擺動最高
高度;h0-落地點高度;k-時間系數。
腿部運動時,在y軸方向沒有位移,x、z軸的軌跡曲線,如式(4)~式(8)所示。
四足機器人的仿真步態運動,如圖7所示。按如下方式進行,其步驟如下:
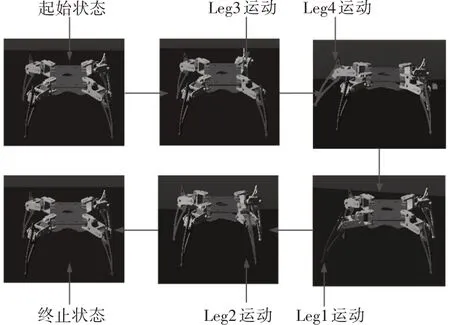
圖7 機器人的仿真步態運動圖Fig.7 Simulated Gait Motion Diagram of Robot
(1)當機器人的Leg4、Leg1、Leg2 為支撐相時,Leg3 為擺動相,機身旋轉一定角度,機身向前運動距離S1,消耗時間為0.2T。
(2)當機器人的Leg1、Leg2、Leg3 為支撐相時,Leg4 為擺動相,機身旋轉一定角度,機身向前運動距離S2,消耗時間為0.2T;
(3)當機器人的Leg2、Leg3、Leg4 為支撐相時,Leg1 為擺動相,機身旋轉一定角度,機身向前運動距離S3,消耗時間為0.2T;
(5)當機器人的Leg1、Leg2、Leg3、Leg4支撐相時,機身旋轉一定角度,機身向前運動距離S5,消耗時間為0.2T。
4.3 梯度投影算法的逆運動學求解
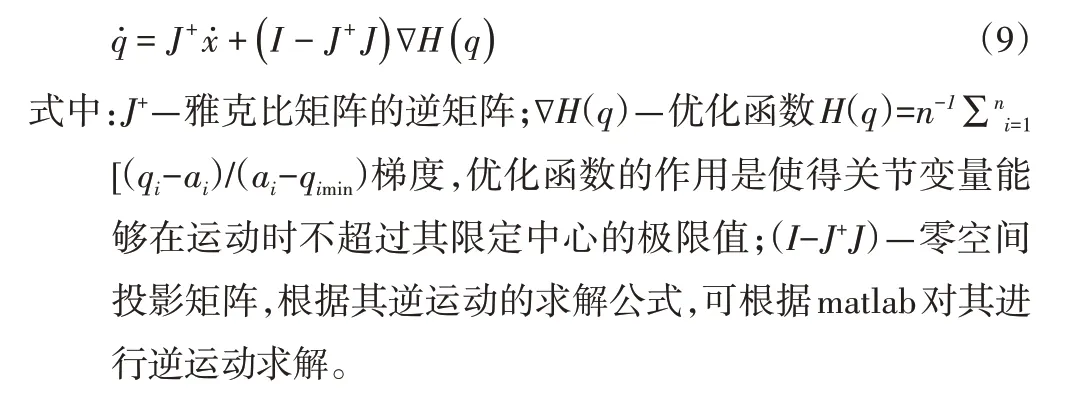
通過上述的動力學的正運動的求解可得出機器人足端的運動坐標,而機器人的逆運動求解是從笛卡爾坐標到關節空間坐標的求解,而機器人的逆運動求解分為封閉解法和數值解法,這里采用基于梯度投影算法的方式求解[fx fy fz]T動力學逆運動的解域,通過給定的足端坐標值來進行對其關節變量的求解,避免產生運動冗余的問題,使得其逆運動有多個運動解,通過雅克比矩陣的逆矩陣反求出其關節變量。
假設其足尖在的坐標矢量為f,關節變量用q表示,根據梯度投影算法可得:
5 運動學仿真
5.1 腿的正運動學與工作空間
機器人的運動軌跡為足端相對于機器人基節坐標系oox0y0z0的工作空間,為了求出機器人的腿部工作域,可設其工作的初始條件:θ1=(-15°50°),θ2=(70°120°),θ3=(-60°0°)。根據其初始條件,可通過matlab 計算出其腿部軌跡域的范圍,如圖8所示。圖8(a)、圖8(b)所示,可得出機器人在x軸的運動范圍為(-150mm,110mm),y軸的運動范圍為(-230mm,120mm),x與y的運動軌跡近乎復合擺線,由此可確定機器人與地面接觸時x與y軸的運動速度與加速度為零,機器人y與z軸的位移方向軌跡圖,如圖8(c)所示。其軌跡為斜率為1.2 的直線,z軸的運動范圍為(-280mm,100mm)。機器人在空間的合成位移圖,如圖8(d)所示。其曲線的空間分布與復合擺線相符,表明仿生機器人的運動分解是可行的,其空間運動坐標可進行adams 仿真步態規劃。
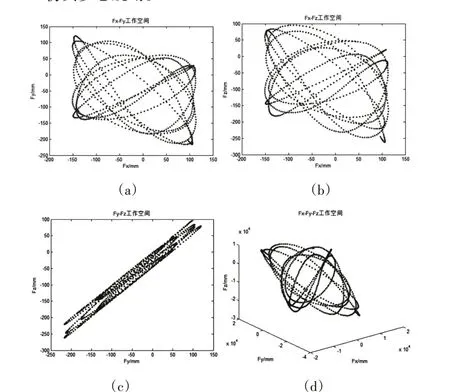
圖8 足尖軌跡圖Fig.8 Foot Tip Trajectory
5.2 腿的逆運動學仿真
通過對參數設定,設置H0=87mm,S0=217mm,S1=S2=S3=S4=S5=38mm,Ty=0.5s,對式(4)~式(8)進行逆運動學求解,利用matlab 對其步態軌跡進行仿真,可求出其關節變量的取值范圍,并將機器人的步態軌跡作為仿真的輸入條件,可輸出機器人關節變量的取值范圍,仿真的時間為3s,其時間與角位移的關系,如圖9 所示,圖9 的q1、q2、q3分別表示其關節的角度θ1、θ2、θ3在(0~3)s 的角位移的變化量,關節變量q1、q2、q3與時間的運動軌跡為正弦函數,q1的范圍為(-38~9)°,q2的范圍為(63~94)°,q3的范圍為(-53~24)°。從上述求解的解集可知梯度投影算法消除了機器人冗余運動解的存在,有效的找出機器人逆運動的解域。通過matlab 將機器人運動軌跡模型導入adams 進行步態規劃分析,可得出機械腿足端的速度和機器人重心位移與時間的變化曲線。機器人行走速度,如圖10 所示。可看出機器人腿部的速度呈現一個個脈沖的形式,時間間隔小,運動速度均勻。機器人重心位移,如圖11 所示。可知機器人每秒位移為25mm,3s 內機器人重心向前運動了75mm,且運動具有連續性,表明該運動平穩且步態位移均勻,避免了因速度波動大對機器人有較大的沖擊,從而驗證了運動控制方程是正確的,結構設計是合理的,仿生機器人的動作分解是可行的。
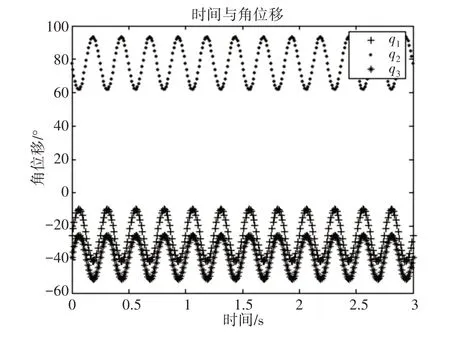
圖9 關節變量變化圖Fig.9 Joint Variable Change Chart
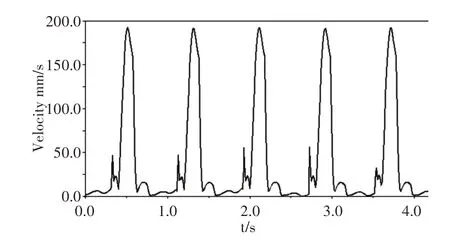
圖10 機器人行走速度圖Fig.10 Robot Walking Speed Chart
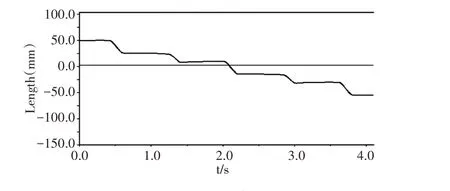
圖11 機器人重心位移圖Fig.11 Displacement of Robot Center of Gravity
6 結論
(1)仿照蜘蛛結構對機器人的結構進行設計,提出一種修正系數的復合擺線運動軌跡來規劃機器人的步態,確保機器人腿部與地面接觸無沖擊。
(2)通過MDH 法建立機器人的足端的運動軌跡方程,對關節變量q1、q2、q3進行參數化設置,求解出機器人足端的x方向的最大距離為250mm,y軸的最大距離為300mm,z軸方向的極限高度為367mm。
(3)運用梯度投影法對足端軌跡為復合擺線形式的機器人進行關節變量q1、q2、q3的求解,求解出的q1的范圍為(-38~9)°,q2的范圍為(63~94)°,q3的范圍為(-53~-24)°,滿足關節變量的初始值范圍。
(4)利用matlab將機器人的運動學模型導入adams中進行聯合仿真,仿真結果表明機器人腿部的速度呈現一個個脈沖的形式,時間間隔小,運動速度均勻、平穩,運動軌跡與復合擺線方程相符。從而驗證了運動控制方程是正確的,結構設計是合理的,仿生機器人的動作分解是可行的。
