密集障礙物下無人艇模糊雙窗口DWA避障算法
2022-01-14 01:39:34張金澤趙紅王寧郭晨
中國(guó)艦船研究 2021年6期
張金澤,趙紅,王寧,郭晨
1 大連海事大學(xué) 船舶電氣工程學(xué)院,遼寧 大連 116026
2 大連海事大學(xué) 輪機(jī)工程學(xué)院,遼寧 大連 116026
3 哈爾濱工程大學(xué) 船舶工程學(xué)院,黑龍江 哈爾濱,150001
0 引 言
無人艇(unmanned surface vehicle,USV)是一種輕型智能水面運(yùn)載工具,具有體積小、造價(jià)低、速度快、機(jī)動(dòng)性強(qiáng)等特點(diǎn)[1],在我國(guó)環(huán)境檢測(cè)、科研勘探、水下測(cè)繪、搜索救援、安全巡邏等領(lǐng)域均有應(yīng)用。
自主導(dǎo)航是USV的核心技術(shù)之一。在實(shí)際海洋環(huán)境中,特別是漁船作業(yè)區(qū)、港口、臨海、錨地等復(fù)雜環(huán)境下,僅通過衛(wèi)星拍攝的海圖,很難實(shí)時(shí)獲得環(huán)境的完整信息。例如,無人艇在大型水產(chǎn)養(yǎng)殖區(qū)執(zhí)行餌料投放、水質(zhì)檢測(cè)等任務(wù)時(shí),當(dāng)水面上有臨時(shí)停靠的漁船等障礙物時(shí),就需要無人艇通過船載的雙目視覺、激光雷達(dá)等傳感器實(shí)時(shí)感知周圍環(huán)境,獲取局部的障礙物信息,進(jìn)而應(yīng)用局部路徑規(guī)劃方法使無人艇完成自主避障。經(jīng)過國(guó)內(nèi)外學(xué)者多年的研究,目前已經(jīng)有很多成熟的算法用于無人艇的路徑規(guī)劃問題。局部路徑規(guī)劃常用的算法有人工勢(shì)場(chǎng)法、向量場(chǎng)直方圖(vector field histogram,VFH)法和動(dòng)態(tài)窗口法(dynamic window approach,DWA)等。
人工勢(shì)場(chǎng)法由Khatib[2]提出,其基本思想是建立虛擬的人工力場(chǎng)。障礙物會(huì)對(duì)無人艇產(chǎn)生斥力,目標(biāo)點(diǎn)則對(duì)無人艇產(chǎn)生引力,引力和斥力的合力就會(huì)驅(qū)動(dòng)無人艇運(yùn)動(dòng)。人工勢(shì)場(chǎng)法具有數(shù)學(xué)描述簡(jiǎn)潔、計(jì)算量小、反應(yīng)速度快、實(shí)時(shí)性高、規(guī)劃軌跡平滑的優(yōu)點(diǎn),便于底層的實(shí)時(shí)控制[3]。但同時(shí)也存在一些固有的缺陷,比如存在局部極值點(diǎn)障礙物附近目標(biāo)不可達(dá)等問題。
基于人工勢(shì)場(chǎng)法的思想,Borenstein等[4]提出了VFH法。該算法是一種未知環(huán)境下的局部避障算法,其通過測(cè)距傳感器測(cè)得的信息建立向量場(chǎng)直方圖,進(jìn)行兩級(jí)環(huán)境數(shù)據(jù)壓縮,并考慮無人艇在前進(jìn)運(yùn)動(dòng)過程中產(chǎn)生的代價(jià),進(jìn)而得到最優(yōu)的可行方向,具有實(shí)時(shí)性高、避障可靠等優(yōu)點(diǎn)[5]。但是該算法沒有考慮無人艇自身的運(yùn)動(dòng)學(xué)性能,導(dǎo)致無人艇在實(shí)際環(huán)境中并不能按照規(guī)劃好的路徑航行[6]。
為此,Simmons[7]提出了曲率速度法(curvature velocity method,CVM),即將避障問題轉(zhuǎn)化為約束和優(yōu)化速度空間的問題,考慮了無人艇的速度和加速度的限制。隨后,F(xiàn)ox等[8]提出了更為完善的動(dòng)態(tài)窗口算法(dynamic window approach,DWA)。該算法充分考慮了無人艇的運(yùn)動(dòng)學(xué)性能和環(huán)境約束等因素,已在無人艇避障領(lǐng)域得到廣泛應(yīng)用。
DWA算法是首先根據(jù)無人艇自身的運(yùn)動(dòng)學(xué)性能建立一個(gè)預(yù)選速度窗口,然后再通過評(píng)價(jià)函數(shù)優(yōu)化得到最優(yōu)速度(包括前進(jìn)速度和艏搖角速度),其中評(píng)價(jià)函數(shù)綜合考慮了艏向角、航速和安全性這3個(gè)因素。采用該算法能夠直接獲得無人艇的最優(yōu)前進(jìn)速度和艏搖角速度,規(guī)劃的航行軌跡平滑,適合無人艇實(shí)際航行過程的特點(diǎn)。但原始DWA算法存在2個(gè)主要的問題:一是會(huì)導(dǎo)致無人艇選擇從密集障礙物群的外圍繞行,而無法從密集障礙物之間穿過,致使無人艇的航行路徑過長(zhǎng);二是算法的評(píng)價(jià)函數(shù)權(quán)值固定,無人艇無法適應(yīng)航行于密集障礙物海域時(shí)的復(fù)雜海況。為解決上述問題,有學(xué)者提出了改進(jìn)的優(yōu)化方法,如程傳奇等[9]將全局路徑規(guī)劃和局部路徑規(guī)劃聯(lián)系在一起,將A*算法與DWA算法融合后提出了一種全局動(dòng)態(tài)路徑規(guī)劃算法,在保證規(guī)劃路徑全局最優(yōu)性的基礎(chǔ)上,可提高平滑性及路徑規(guī)劃的局部避障能力。Tang等[10]根據(jù)DWA算法提出了一種OAABHW(obstacle avoidance algorithm based on heading window)避障算法,該算法將窗口劃分為艏向窗口和速度窗口,并構(gòu)建了2個(gè)評(píng)價(jià)函數(shù)分別選擇最優(yōu)的避障速度和避障方向。Zhang等[11]引入強(qiáng)化學(xué)習(xí)算法,提出了一種基于強(qiáng)化學(xué)習(xí)的自適應(yīng)避障算法,該算法采用自適應(yīng)學(xué)習(xí)模塊處理海風(fēng)和涌流的影響,提高了無人艇的避障性能。田永永等[12-13]針對(duì)稠密障礙物場(chǎng)景和動(dòng)態(tài)障礙物的運(yùn)動(dòng)特性,提出了自適應(yīng)動(dòng)態(tài)窗口法和基于速度方向判定的動(dòng)態(tài)窗口法,在原始算法的基礎(chǔ)上實(shí)現(xiàn)了改進(jìn)優(yōu)化。
上述改進(jìn)措施雖然可以解決原始DWA算法存在的問題,但這些算法有的是基于DWA算法與其他算法相融合,增加了算法的復(fù)雜度,有的沒有考慮無人艇實(shí)際船載傳感器獲取信息的范圍限制,且沒有規(guī)定對(duì)單個(gè)障礙物結(jié)束避障的邊界,無法有效優(yōu)化速度集合。鑒于此,本文擬提出一種雙窗口DWA避障算法,即在常規(guī)速度窗口的基礎(chǔ)上再設(shè)計(jì)一個(gè)基于艇載傳感器的感知窗口,以對(duì)感知范圍內(nèi)的障礙物進(jìn)行處理,并將感知窗口作為結(jié)束當(dāng)前單個(gè)障礙物避障的邊界,障礙物離開感知窗口即結(jié)束對(duì)其的避障。然后,在此基礎(chǔ)上提出基于模糊控制策略的改進(jìn)型雙窗口(fuzzy-based dynamic double-window approach,F(xiàn)DDWA)算法,即利用所設(shè)計(jì)的障礙物密集程度函數(shù)來表征障礙物的分布情況,根據(jù)不同的實(shí)時(shí)海況信息,利用模糊控制策略動(dòng)態(tài)調(diào)整評(píng)價(jià)函數(shù)中的權(quán)值參數(shù),以使算法規(guī)劃的路徑更加安全、合理,提高無人艇的整體運(yùn)行性。
1 原始DWA算法
1.1 原始DWA算法介紹
DWA的基本思想是:計(jì)算在每一個(gè)采樣時(shí)間間隔內(nèi)無人艇的可達(dá)速度,構(gòu)成一個(gè)速度空間的集合,即動(dòng)態(tài)速度窗口,然后通過構(gòu)建的評(píng)價(jià)函數(shù)優(yōu)化動(dòng)態(tài)窗口,并從動(dòng)態(tài)窗口中選擇出最優(yōu)的無人艇可行速度。
由無人艇運(yùn)動(dòng)學(xué)分析可知,其前進(jìn)速度u和艏搖角速度r均存在上限值,分別將其設(shè)為umax和rmax,則無人艇的速度集合Vs(u,r)可以設(shè)置為:

而對(duì)于一個(gè)給定的無人艇推進(jìn)電機(jī)而言,其有限的輸出力矩限制了無人艇在一個(gè)采樣時(shí)間間隔dt內(nèi)可以達(dá)到的最大速度和最小速度,故根據(jù)當(dāng)前采樣時(shí)刻的前進(jìn)速度ucurr和 艏搖角速度rcurr,由式(2)可以得到下一個(gè)采樣時(shí)刻無人艇的實(shí)際可達(dá)速度集合Vd(u,r)為:

式中:u˙為 前進(jìn)加速度;r˙為艏搖角加速度。
通過式(2),即可確定無人艇在下一個(gè)采樣時(shí)刻可選速度的集合范圍。但集合中的元素是連續(xù)的,為此,將集合中的速度離散化,即將集合根據(jù)前進(jìn)速度離散間隔du和 艏搖角速度離散間隔dr離散為M個(gè)前進(jìn)速度u和N個(gè)艏搖角速度r,離散后的每一個(gè)ui和ri組 成一個(gè)速度矢量(ui,ri),則總共有M·N個(gè)速度矢量。
為保證無人艇在未知海域航行時(shí)能安全、有效地避開障礙物,需考慮制動(dòng)距離的約束,即下一采樣時(shí)刻的速度需滿足無人艇與障礙物的距離小于制動(dòng)距離SD。制動(dòng)距離SD和考慮制動(dòng)距離的可達(dá)速度集合VSD(u,r)的計(jì)算如式(3)和式(4)所示,其中,假定經(jīng)過m個(gè)采樣時(shí)段可令無人艇的前進(jìn)速度降至0。

式中,D(u,r)為當(dāng)前無人艇距離最近障礙物的距離。則動(dòng)態(tài)速度窗口Vr(u,r)為Vs(u,r),Vd(u,r)和VSD(u,r)的交集:

無人艇的全部軌跡是由n個(gè) 時(shí)段的n個(gè)小軌跡所組成,其每個(gè)采樣時(shí)間間隔的運(yùn)動(dòng)軌跡方程如下:

式中:x,y為無人艇當(dāng)前采樣 時(shí) 刻的坐標(biāo);x′,y′為無人艇位置信息更新后的坐標(biāo);?為當(dāng)前采樣時(shí)刻無人艇的艏向;?′為下一采樣時(shí)刻無人艇的艏向。
將離散化后的全部速度矢量代入式(6),即可計(jì)算出T個(gè)采樣時(shí)間間隔內(nèi)的全部預(yù)測(cè)軌跡。無人艇在一個(gè)動(dòng)態(tài)窗口內(nèi)的部分預(yù)測(cè)軌跡如圖1所示。

圖1 無人艇部分預(yù)測(cè)軌跡Fig.1 Partially predicted trajectory of USV
構(gòu)建一個(gè)兼顧無人艇航速、艏向以及安全性的評(píng)價(jià)函數(shù)G(u,r),如式(7)所示,從動(dòng)態(tài)速度窗口的Vr中 選擇使評(píng)價(jià)函數(shù)G(u,r)值為最大的速度矢量 (u,r),視為最優(yōu)速度。

式中:H(u,r)用于評(píng)價(jià)無人艇的艏向,無人艇艏向完全指向目標(biāo)區(qū)域位置時(shí)有最大值;S(u,r)用于評(píng)價(jià)無人艇的安全性,即預(yù)測(cè)軌跡中無人艇與障礙物間的最小距離,這個(gè)距離越大,發(fā)生碰撞的危險(xiǎn)就越小;v(u,r)用于評(píng)價(jià)無人艇的速度,結(jié)果盡量選擇動(dòng)態(tài)速度窗口Vr中前進(jìn)速度大的值;α,β,γ為對(duì)應(yīng)的3個(gè)權(quán)值參數(shù)。而且,評(píng)價(jià)函數(shù)中H(u,r),S(u,r),v(u,r)的值都被歸一化處理到[0,1]之間,以避免任何一項(xiàng)值過大。
對(duì)障礙物進(jìn)行圓形包圍體建模。對(duì)于船類障礙物,選擇圓形包圍體建模可以提高安全性,簡(jiǎn)化計(jì)算量,縮短計(jì)算時(shí)長(zhǎng),有利于算法的實(shí)時(shí)性和反應(yīng)速度。外包圓具體的取值方法為:當(dāng)傳感器探測(cè)到障礙物位置時(shí),以其探測(cè)位置作為原點(diǎn),其直徑取1.5倍的本艇長(zhǎng)度,即R=1.5L。
1.2 基于原始DWA算法避障時(shí)存在的問題
在密集障礙物海況下,無人艇基于原始DWA算法進(jìn)行避障時(shí),主要存在2個(gè)方面的問題:
1) 原始DWA算法會(huì)導(dǎo)致無人艇選擇從密集障礙物群的外圍繞行,而無法從密集障礙物之間穿過,致使無人艇航行路徑過長(zhǎng)。
2) 無人艇在任務(wù)海域航行時(shí)其整體避障性能無法做到最優(yōu)。無人艇為保證艏向和前進(jìn)速度,通常會(huì)出現(xiàn)選擇過激速度的情況,令無人艇與障礙物靠得非常近,從而威脅無人艇的安全。
將 α,γ參數(shù)固定,僅調(diào)節(jié)安全性權(quán)值參數(shù)β的對(duì)比仿真實(shí)驗(yàn)結(jié)果如圖2所示,并將整個(gè)航行的軌跡長(zhǎng)度、運(yùn)行時(shí)間、安全距離(無人艇距離障礙物的最短距離)等具體實(shí)驗(yàn)數(shù)據(jù)列于表1中。當(dāng)β=1時(shí),由圖2(a)及表1中的數(shù)據(jù)可見,無人艇在航行過程中若距離障礙物較近,容易造成無人艇與障礙物發(fā)生碰撞;但當(dāng)β=15時(shí),雖然安全性得到了提高,但航行軌跡長(zhǎng)度增加了,運(yùn)行時(shí)間增加了12.86%,算法的計(jì)算效率明顯下降。

圖2 基于原始DWA算法的無人艇航行避障軌跡Fig.2 Obstacle avoidance trajectory of USV based on original DWA algorithm

表1 實(shí)驗(yàn)結(jié)果數(shù)據(jù)Table1 Experimental result data
2 基于模糊控制策略的改進(jìn)型動(dòng)態(tài)雙窗口算法
針對(duì)原始DWA算法存在的2個(gè)主要問題,本文提出了基于模糊控制策略的改進(jìn)型動(dòng)態(tài)雙窗口(FDDWA)算法:
1) 提出了雙窗口概念,即在原始動(dòng)態(tài)速度窗口的基礎(chǔ)上又設(shè)計(jì)一個(gè)扇形動(dòng)態(tài)感知窗口,也即速度與感知雙窗口,通過對(duì)感知窗口內(nèi)障礙物的局部分布狀態(tài)進(jìn)行分析與處理,不僅可以有效提高算法的速度優(yōu)化效率,而且還規(guī)定了局部障礙物結(jié)束避障的邊界,可以避免無人艇過度繞行障礙物的問題,使避障軌跡更加平滑、合理。同時(shí),通過設(shè)置最小安全距離Dmin,可避免算法選擇過激速度。
2) 將模糊控制策略應(yīng)用于雙窗口DWA算法。根據(jù)復(fù)雜海況的不同障礙物信息,基于模糊控制策略動(dòng)態(tài)調(diào)整評(píng)價(jià)函數(shù)中的安全性權(quán)值參數(shù)β和速度權(quán)值參數(shù)γ,可令無人艇在避障航行時(shí)兼顧安全性與航行速度,從而提高算法的整體運(yùn)行性能。
2.1 感知窗口
實(shí)際應(yīng)用中的無人艇可通過艇載的雙目視覺、激光雷達(dá)來獲取無人艇及障礙物的位置、距離等信息,通過這些傳感器共同工作獲得障礙物的完整信息。這些傳感器通常只能探測(cè)一定范圍內(nèi)的信息,而原始DWA算法并未考慮傳感器的這種局限性,為此,本文設(shè)計(jì)了一個(gè)如圖3所示的扇形區(qū)域,即動(dòng)態(tài)感知窗口來表示船載傳感器的探測(cè)范圍,不僅使算法更加適用于實(shí)際應(yīng)用場(chǎng)景,而且還提高了算法優(yōu)化效率。由于同時(shí)還規(guī)定了對(duì)單個(gè)靜態(tài)障礙物結(jié)束避障的邊界,因此當(dāng)障礙物離開感知窗口時(shí),即會(huì)停止對(duì)其避障,這樣可避免過度避障行為,使避障軌跡更加合理。

圖3 感知窗口示意圖Fig.3 Schematic diagram of sensing window
圖4所示為無人艇分別基于原始DWA與本文改進(jìn)型雙窗口DWA算法所進(jìn)行的航行避障對(duì)比仿真實(shí)驗(yàn)。由圖可見,在固定權(quán)值參數(shù)α,β,γ的情況下,相比原始DWA算法,改進(jìn)型雙窗口DWA算法令無人艇在密集障礙物分布的復(fù)雜海域內(nèi)航行時(shí)具有更加安全、合理的航行軌跡,航行軌跡長(zhǎng)度縮短了24.62%,總運(yùn)行時(shí)間減少了18.18%,算法的整體運(yùn)行性能得到了顯著提高。

圖4 基于原始DWA與本文雙窗口DWA算法的對(duì)比仿真實(shí)驗(yàn)Fig.4 Comparison experiment based on original DWA and improved dual-window DWA algorithm
2.2 設(shè)置最小安全距離
在密集障礙物分布的海域內(nèi)航行時(shí),無人艇的安全是根本,在任何情況下都不允許出現(xiàn)過激速度情況。為此,本文提出設(shè)置最小安全距離Dmin,以對(duì)速度集合進(jìn)行進(jìn)一步的篩選,將無人艇與障礙物之間距離小于Dmin的速度組合舍棄,確定新的速度窗口集合Vr′,如式(8) 和式(9)所示。

式中,VDmin為考慮最小安全距離的速度集合。
2.3 改進(jìn)型模糊自適應(yīng)雙窗口FDDWA算法
2.3.1 密集度計(jì)算方法
船載傳感器可以獲取無人艇感知窗口內(nèi)局部障礙物的完整信息,當(dāng)采用模糊控制進(jìn)行算法參數(shù)動(dòng)態(tài)調(diào)整時(shí),需根據(jù)任務(wù)海域內(nèi)進(jìn)入感知窗口的障礙物實(shí)時(shí)分布情況進(jìn)行決策,因此,本文設(shè)計(jì)了一個(gè)表征障礙物密集度的函數(shù)I(n,d,s),其定義如式(10)所示:

式中:n為障礙物個(gè)數(shù);d為感知窗口內(nèi)距離無人艇最近的2個(gè)障礙物之間的距離;s為在感知窗口內(nèi)探測(cè)到的由所有障礙物組成的多邊形的面積;δ,ε,μ為 各個(gè)部分的權(quán)重系數(shù);a,b為指數(shù)函數(shù)的底數(shù)系數(shù)。密集度函數(shù)I(n,d,s)的值越大,表示感知窗口內(nèi)障礙物的分布情況越密集,圖5所示為針對(duì)不同障礙物分布情況的仿真分析結(jié)果。
當(dāng)視覺窗口中障礙物的分布如圖5(a)所示時(shí),密集度函數(shù)的值為0.615 7;當(dāng)視覺窗口中障礙物的分布如圖5(b)所以時(shí),密集度函數(shù)的值為1.960 0;當(dāng)視覺窗口中障礙物的分布如圖5(c)時(shí),密集度函數(shù)的值為2.560 0。實(shí)驗(yàn)結(jié)果表明,本文所提的密集度函數(shù)可以有效地表示感知窗口內(nèi)障礙物的密集程度。

圖5 密集度示意圖Fig.5 Schematic diagram of density
2.3.2 模糊自適應(yīng)雙窗口FDDWA算法
模糊控制是以模糊集理論、模糊語言變量和模糊邏輯推理為基礎(chǔ),將人的經(jīng)驗(yàn)應(yīng)用于控制規(guī)則的智能控制方法,具有魯棒性好、可以增強(qiáng)控制系統(tǒng)自適應(yīng)能力的優(yōu)點(diǎn)。為解決前述原始DWA算法固定權(quán)值參數(shù)所引發(fā)的問題,本文提出了一種基于模糊控制策略的FDDWA算法,可根據(jù)無人艇在航行中的實(shí)時(shí)海況自適應(yīng)動(dòng)態(tài)調(diào)整權(quán)值參數(shù)β 和γ,令其在復(fù)雜海域內(nèi)的航行路徑轉(zhuǎn)折更小,同時(shí)兼顧速度和安全性因素,采用該算法后,其整體運(yùn)行性能更高。
設(shè)計(jì)的模糊控制器采用的是雙入雙出結(jié)構(gòu),輸入變量為密集度函數(shù)值I及無人艇與最近障礙物間的距離D,輸出變量為權(quán)值參數(shù)γ 與β,各輸入、輸出子集如表2所示,對(duì)應(yīng)的論域及隸屬度函數(shù)如圖6所示,模糊控制規(guī)則如表3和表4所示。

圖6 模糊邏輯變量的隸屬度函數(shù)Fig.6 Membership function of fuzzy logic variables

表2 模糊邏輯控制輸入輸出子集Table2 Fuzzy logic control input and output subset

表3 輸出量γ的模糊規(guī)則Table3 Fuzzy rules of γ

表4 輸出量β的模糊規(guī)則Table4 Fuzzy rules of β
2.4 FDDWA算法流程
FDDWA算法的流程步驟如下:
1) 確定無人艇的起點(diǎn)和目標(biāo)范圍,計(jì)算動(dòng)態(tài)速度窗口;
2) 更新動(dòng)態(tài)速度窗口,計(jì)算預(yù)測(cè)軌跡;
3) 通過艇載傳感器更新動(dòng)態(tài)感知窗口內(nèi)障礙物信息,計(jì)算I和D;
4) 由模糊控制器根據(jù)當(dāng)前的I和D計(jì)算γ和β,代入評(píng)價(jià)函數(shù);
5) 根據(jù)評(píng)價(jià)函數(shù)選擇最優(yōu)速度;
6) 執(zhí)行速度,更新位置,判斷是否到達(dá)目標(biāo)區(qū)域,若是,則結(jié)束,否則,返回步驟1),進(jìn)入下一循環(huán)。
3 無人艇避障仿真實(shí)驗(yàn)
為了驗(yàn)證本文所提FDDWA算法的有效性與優(yōu)越性,在一片障礙物密集分布的任務(wù)海域內(nèi),對(duì)無人艇基于固定權(quán)值參數(shù)的雙窗口DWA算法和FDDWA算法進(jìn)行了對(duì)比仿真實(shí)驗(yàn)。有關(guān)無人艇和算法的一些參數(shù)如表5~表8所示。

表5 無人艇速度限制Table5 Speed limit of USV
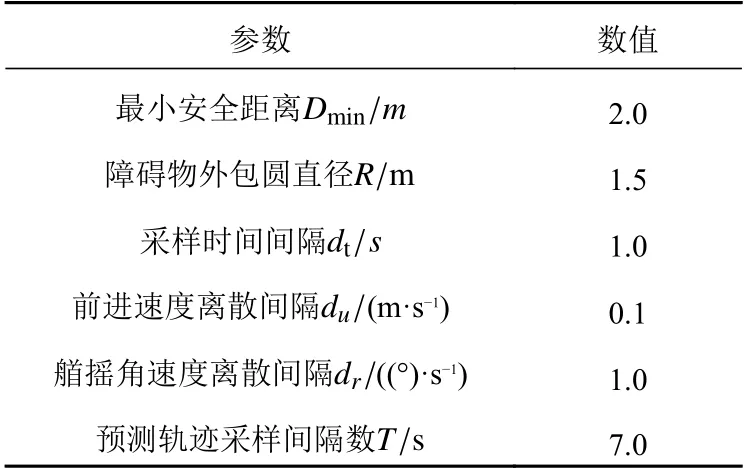
表6 算法參數(shù)設(shè)置Table6 Parameter settings of algorithm

表7 密集度函數(shù)參數(shù)設(shè)置Table7 Parameter setting of density function

表8 無人艇及感知窗口初始狀態(tài)設(shè)置Table8 Initial state setting of USV and sensing window
3.1 基于固定權(quán)值參數(shù)雙窗口DWA算法的無人艇避障仿真實(shí)驗(yàn)
1) 權(quán)值參數(shù)選取 α =2,β=1,γ=15。
由圖7所示的仿真實(shí)驗(yàn)結(jié)果可見,無人艇的航行軌跡相對(duì)平滑,沒有出現(xiàn)較大的轉(zhuǎn)彎現(xiàn)象,但通過密集障礙物區(qū)域時(shí)安全性較低,安全距離僅3.34 m。無人艇在整個(gè)航行過程中基本保持全速航行,受障礙物影響的航速波動(dòng)及艏搖角速度波動(dòng)均較小。因此,若需強(qiáng)調(diào)無人艇的航行速度,可將β設(shè)置得較小,γ設(shè)置得較大,但這樣安全性會(huì)較差。

圖7 雙窗口DWA算法下α =2,β=1,γ=15 時(shí)的仿真實(shí)驗(yàn)結(jié)果Fig.7 Simulation experiment results when α =2,β=1,γ=15 under the dual-window DWA algorithm
2) 權(quán)重參數(shù)選取 α =2,β=15,γ=15。
由圖8所示的仿真實(shí)驗(yàn)結(jié)果可見,與圖7的結(jié)果相比,無人艇通過密集障礙物區(qū)域的安全性得到了改善(安全距離增至3.56 m),但航行軌跡轉(zhuǎn)彎較多,無人艇在整個(gè)航行過程中難以保證全速前進(jìn),且受障礙物影響的航速波動(dòng)及艏搖角速度波動(dòng)均較大,需頻繁轉(zhuǎn)向變速。因此,若需強(qiáng)調(diào)無人艇航行的安全性,可將β設(shè)置得較大,γ設(shè)置得較小,但這樣避障路徑不盡合理,且運(yùn)行時(shí)間會(huì)變長(zhǎng)。
圖8 雙窗口DWA算法下α =2,β=15,γ=15時(shí)的仿真實(shí)驗(yàn)結(jié)果Fig.8 Simulation experiment results when α =2,β=15,γ=15 under the dual-window DWA algorithm
3.2 基于FDDWA算法的無人艇避障仿真實(shí)驗(yàn)
基于FDDWA算法的無人艇避障仿真實(shí)驗(yàn)結(jié)果如圖9和圖10所示,其中的實(shí)時(shí)動(dòng)態(tài)權(quán)值參數(shù)用 βd,γd表示。與圖7和圖8相比,基于FDDWA算法的無人艇的航行路徑更加平滑、合理,無人艇通過密集障礙物區(qū)域時(shí)的安全性更高(安全距離增加至4.09 m),且在整個(gè)航行過程中幾乎是保持全速航行,受障礙物影響的航速波動(dòng)及艏搖角速度波動(dòng)均較小,一些相關(guān)的算法運(yùn)行數(shù)據(jù)如表9所示。

圖9 基于FDDWA算法的無人艇避障仿真實(shí)驗(yàn)結(jié)果 (α =2,β=βd,γ=γd)Fig.9 Simulation experiment results of obstacle avoidance for USV based on FDDWA algorithm (α =2,β=βd,γ=γd)

圖10 不同權(quán)值參數(shù)下的無人艇避障軌跡對(duì)比Fig.10 Comparison of USV's obstacle avoidance trajectory under different weight parameters
由表9中的數(shù)據(jù)可知,相比固定權(quán)值參數(shù)設(shè)置( α=2,β=15,γ=1)的雙窗口算法,采用動(dòng)態(tài)參數(shù)的FDDWA避障算法的迭代次數(shù)降低了28.24%,運(yùn)行時(shí)間降低了43.43%,軌跡長(zhǎng)度降低了2.58%,算法效率明顯得到提高;而相比α=2,β=1,γ=15的參數(shù)設(shè)置,F(xiàn)DDWA的迭代次數(shù)、運(yùn)行時(shí)間和軌跡長(zhǎng)度基本不變,但安全距離提高了22.46%,安全性得到顯著提高。仿真結(jié)果充分驗(yàn)證了本文所提FDDWA算法的有效性與優(yōu)越性。

表9 實(shí)驗(yàn)數(shù)據(jù)Table9 Experimental data
4 結(jié) 語
本文首先針對(duì)原始DWA算法未考慮各傳感器探測(cè)范圍的限制,也未規(guī)定對(duì)單個(gè)障礙物結(jié)束避障邊界的問題,設(shè)計(jì)了一個(gè)扇形動(dòng)態(tài)感知窗口,然后與速度窗口一起構(gòu)成速度與感知雙窗口模型,用于對(duì)感知窗口內(nèi)的障礙物分布情況進(jìn)行分析與處理,待單個(gè)障礙物離開感知窗口即結(jié)束對(duì)其的避障。同時(shí),通過設(shè)置最小安全距離Dmin,避免了算法選擇過激速度。然后,針對(duì)算法評(píng)價(jià)函數(shù)權(quán)值固定、無人艇在任務(wù)海域航行時(shí)的整體避障性能無法做到最優(yōu)的問題,提出了基于模糊控制策略的FDDWA算法,通過動(dòng)態(tài)調(diào)整評(píng)價(jià)函數(shù)中的參數(shù)β 和γ來適應(yīng)變化的環(huán)境,用以優(yōu)化算法的避障性能。仿真實(shí)驗(yàn)結(jié)果證明,本文提出的FDDWA算法不僅可以避免無人艇過度繞行密集障礙物群的問題,還可以大幅改進(jìn)算法的運(yùn)行效率和避障性能,使避障軌跡更加合理、安全,對(duì)無人艇自主避障技術(shù)研究有一定的參考價(jià)值。
