船舶領域粒子圖像測速技術的發展及應用
2022-01-14 01:39:56郭春雨徐菁菁韓陽王超鄶云飛
中國艦船研究 2021年6期
郭春雨,徐菁菁,韓陽,王超,鄶云飛
哈爾濱工程大學 船舶工程學院, 黑龍江 哈爾濱 150001
0 引 言
流場測試試驗為流場結構分析、流動規律認識、流場控制等研究提供了有力支撐。在現代船舶水動力實驗中,流場測量主要包括煙線法、紋影法以及熱線/熱膜流速測量、超聲波多普勒測速、激光多普勒測速、激光散斑全場測速、相位多普勒粒子分析等方法技術。然而,這些流場測速方法技術往往無法定量研究流場、干擾流場或者只能用于單點測量等。隨著對船舶流場的深入研究,對于水面、水下船舶的設計優化、推進器的性能等研究也逐漸深入,學者們愈加關注細觀流場的物理特性,精確獲取流場全面信息的需求更加迫切。流場的精細獲取是實現流場流動信息精細化和深入揭示流場物理現象、流動細節及作用機理的必要手段。在第25屆國際拖曳水池會議(ITTC)[1]上,為便于全球學者開展流體力學的基礎研究,成立了精細流場測量研究組。對于船舶領域精細流場的研究,粒子圖像測速(particle image velocimetry, PIV)技術可在不擾亂流場的情況下準確測量流場的瞬態流動信息。PIV可獲取三維瞬時速度場以量化流場精細流動信息與流動特征,使船舶設計及水動力性能優化更加簡便易行。
本文將介紹PIV的方法原理、概述PIV圖像處理技術的研究進展,并分析PIV技術在船舶領域的應用情況。
1 PIV介紹
1984年Adrian[2]提出了一種非接觸式精細流場測量技術,即PIV技術。PIV測試原理是在布滿均勻示蹤粒子的待測流場中通過激光器發射激光,并使用柱面透鏡形成激光片光源;片光源將帶有示蹤粒子的流場照亮,由圖像采集設備進行光學成像以記錄流場中粒子的運動。最后,由計算機及各種圖像處理算法對采集到的圖像進行處理分析,即可得到待測流場的流動信息,如圖1所示[3]。圖中,Δt為時間變量,ΔX為粒子的位移距離,l1和l2為測試中的任意2張圖像,S為光學成像時的物距,S′為光學成像時的像距。d1A為一個像素的邊長。

圖1 PIV原理[3]Fig.1 Principle of PIV[3]
粒子圖像測速系統主要由圖像采集系統及激光照明系統組成。圖像采集系統最初基于膠片成像,通過雙重圖像曝光來獲取流場信息,而這種基于膠片的成像技術通常1天只能獲取1~2幅二維流場數據,流場信息獲取效率很難滿足對復雜流場的細致分析需求。20世紀90年代,電荷耦合元件(CCD)相機成像技術問世,10 幀/s的圖像采集速度(每秒傳輸幀數(fps))甚至更高的圖像采集效率極大拓展了粒子圖像測試技術的應用領域。進入21世紀,隨著CCD相機的發展以及互補金屬氧化物半導體(CMOS)相機的出現,相機的圖像采集速度有了質的飛躍,每秒傳輸幀數可達106量級。圖像采集系統的發展使PIV在獲取高分辨率圖像的同時增加了時序流動特性捕捉能力。此外,激光照明系統的發展同樣支撐了PIV的飛躍:由連續激光器逐步發展為具有高能量輸出、高激發頻率、低脈沖間隔的雙脈沖高頻激光器;銅蒸汽激光、氦?氖激光、紅寶石激光、半導體激光以及氬離子激光等照明技術的發展,也從光學波長角度極大豐富了PIV在實驗室環境下的應用場景。如今,PIV系統可以輕易地在1 s內紀錄成千甚至上萬張高分辨率的粒子圖像。這種PIV系統被稱為時間分辨粒子成像測速系統(time-resolved PIV,TR-PIV),它不僅大大提高了流場測量效率,而且可以通過時間分辨率的解析解決測量過程中的瞬態問題。飛速發展的硬件系統為大批量、高精度的圖像處理帶來了更大的挑戰。在TR-PIV試驗過程中,需要保證高速相機的充分曝光,進而需要保證激光器的脈沖能量充足,這對激光器的要求較高。同時,在試驗過程中會產生大量的試驗數據圖像,然而目前無法實現數據的實時高速傳輸。
隨著對精細流場信息需求的不斷增長和相機成像技術及計算機圖像解析技術的快速發展,PIV由二維發展到三維。三維PIV分為立體PIV( stereoscopic particle image velocimetry,SPIV)、全息PIV ( holography PIV,HPIV)、層析PIV(tomographic PIV,Tomo-PIV)。立體PIV技術運用2個相機進行流場圖像采集,采用片光照明方式,進行圖像處理重構,得到三維流場速度分量。這種PIV本質上依舊是二維PIV。而全息PIV結合了PIV和全息技術,是真正意義上的三維流場測速技術。但全息PIV使用過程中存在粒子定位信息不精準、位移精度不高、光學元件產生噪聲等問題,使全息圖像質量較低,試驗結果精度下降。如何提高全息PIV技術的測量精度還有待研究。
層析PIV是運用多個相機進行流場圖像采集,并通過光學層析成像算法及三維互相關算法進行圖像重建,得到流場的三維速度矢量場。層析PIV原理如圖2所示[4]。在層析PIV測試中,存在如何充分利用光源能量、使照明區域亮度均勻、合理確定照明區域面積等問題,如何獲取清晰有效的待測流場圖像信息亟需研究。

圖2 層析PIV原理示意圖[4]Fig.2 Schematic diagram of tomographic PIV [4]
2 PIV圖像處理
PIV圖像處理方法主要有楊氏條紋法、相關分析法[5]等。由于采用楊氏條紋法進行圖像處理存在速度方向的二義性、速度測量范圍小等問題,而相關分析法的原理簡單且流場計算精度更高,因此相關分析法被廣泛應用并被不斷改進。
相關分析法包含自相關分析法、互相關分析法及光學相關分析法。自相關分析法是通過條紋圖案的傅里葉變換產生空間自相關函數:

式中:I為光的強度;r為平面中測量點的位置;?r為圖像中各粒子之間的位移向量。
自相關算法測得的流場速度方向具有二義性[6]。而Marzouk等[7]提出的非對稱自相關函數很好地解決了PIV圖像中速度方向的二義性問題。
Westerweel[8]對互相關分析法進行了較為全面的分析,互相關分析法可用于2個序列相似性的度量,以一維離散信號為例,相關函數的定義為

式中:f1(i)和f2(i+x)為2個一維離散信號。
互相關分析法的原理是對于連續曝光的2幀圖像,在第1幀圖像中定義一個詢問窗口,通過互相關函數式(2)查找相關性最大的匹配方向,來確定第2幀圖像搜索區域中與之匹配的第2個窗口的位置。

式中:f和g為不同時刻的圖像函數。
采用互相關分析法時,需要將圖像劃分成多個窗口,通過互相關函數對每個窗口進行計算,由此可見,該方法的計算量十分龐大,需要大量的窗口匹配及函數計算。為提高互相關分析計算的效率,鮑曉利等[9]提出了一種改進的基于快速傅里葉變換(FFT)的互相關算法,并利用CCD相機連續采集多幀粒子圖像進行了算法對比驗證及分析。實驗結果表明,改進算法的運算效率提高了約12.25%。
基礎的互相關算法雖然原理較簡單,但存在一定的不足。由于代入函數中數的取值問題,其計算結果只能是近似值。一般采用質心法、拋物線擬合法及高斯擬合法等計算相關函數峰值的亞像素差值,以提高測量精度[10]。在互相關計算分析中,由于存在噪聲等問題,一些窗口的估計值與真實值有出入,使得在流場計算中存在較大誤差。王燦星等[11]在二維PIV圖像處理中通過互相關技術針對誤對應速度向量的判斷和消除準則問題進行了研究。孫鶴泉等[12]基于PIV的頻域實現了利用頻域濾波技術對速度矢量合理構造后的錯誤矢量進行了修正。阮曉東等[13]從流體的連續性角度出發,提出了一種自動檢測粒子圖像測速數據中誤矢量的算法,該算法采用Delaunay網格技術對刪除點進行插值,進而得到全流場的瞬態速度矢量。在圖像處理中,速度場中壞矢量的識別與修正通常是分開實現的。高琪等[14]介紹了一種基于本征正交分解(POD)的粒子圖像處理技術,該技術通過迭代方法實現了速度場壞點的統一識別和修復算法。為獲得更高空間分辨率的速度場,Scarano等[15]提出了基于圖像變形的多重網格迭代算法 (window deformation iterative multi-grid,WIDIM)。這種算法通過圖像變形來縮小迭代過程中判讀窗口的尺寸和間隔,進而提高速度場的空間分辨率。Jia等[16]提出了一種PIV圖像預處理方法,該方法能在圖像處理過程中將彎曲界面周圍的粒子圖像條拉伸成矩形,然后在指定處通過自適應算法進行計算。這種圖像預處理方法比傳統的WIDIM方法具有更高的空間分辨率。
相關分析法中的光學相關分析是采用光學變換產生粒子圖像的自相關,通過對光學數據進行二次光學變換得到圖像處理需要的相關函數,對待測流場進行計算分析。
隨著成像技術的發展和計算機軟件算法的不斷更新,精細流場的三維流場測量技術逐漸成為流場測量的主要研究對象,三維流場的圖像處理算法研究也成為熱門課題。王燦星等[17]對三維PIV圖像后處理進行了研究,建立了一種基于互相關技術的三維PIV圖像處理方法。孫凱[18]結合實際PIV測量的需要,在傳統體視PIV算法的基礎上提出了一種新的角度位移布局的體視PIV算法。該算法在對原始圖像進行校正的基礎上,結合標定計算切面的三維速度。針對運動粒子在具有一定體積的流場中透視成像后易出現的運動重疊問題,以及粒子測速系統中空間點立體匹配難、空間信息難以表示的問題,杜海等[19]根據空間粒子圖像的特點,基于雙目視覺原理對粒子圖像測速儀的匹配技術進行了研究,并提出了基于遺傳算法的三維粒子圖像匹配方法及優化設計方法。
隨著人工智能技術的發展,蔡聲澤等[20]提出了基于深度神經網絡的粒子圖像測速算法。該算法借鑒用于運動估計的光流神經網絡,采用人工合成的粒子圖像數據集進行監督學習訓練,從而獲得適用于流體運動估計的深度神經網絡模型。試驗證明,該算法的測量精度更高,計算時間更短,空間分辨率更高。
3 PIV在船舶中的應用
船舶的流場測量分析是一個復雜而重要的問題。船舶的繞流場、伴流場等是評價其穩性、快速性、操縱性等性能的重要依據。PIV將流體力學中宏觀的力與力矩的研究問題轉變為精細流場的研究,這為學者研究流動機理和流動細節等提供了很大幫助。PIV技術也為船舶的設計優化、船舶推進器的性能優化等提供了重要技術支持。
3.1 基于PIV的水面船舶繞流場研究
Dong等[21]在拖曳水池中應用二維 PIV技術對船模艏波的流場結構進行了研究,該研究開啟了精細流場測試在船舶領域的廣闊天地。自2009年起,每2年舉行1次的先進模型測量技術國際會議,展示了PIV等先進流場測試方法在船舶與海洋工程領域的應用成果。
愛荷華大學水利科學與工程研究院(IIHR)[22]對不同工況下的DTMB5415船模精細流場進行了測量,獲得大量的精細流場數據。首先,應用二維二速度分量(2D-2C)PIV技術,對DTMB 5415船模在靜水、波浪及橫搖工況下的繞流場進行了測試研究;并重構測量數據,得到了三方向的速度、雷諾應力及湍流特征等參數。此外,IIHR應用二維三速度分量(2D-3C)PIV技術,對DTMB 5415船模在動態操縱下的流場進行了測量,水下PIV測試裝置如圖3所示[22]。IIHR的研究團隊[23-27]基于以上測試研究結果建立了試驗流體動力學(EFD DATA)數據庫。Seo等[28]應用PIV對KVLCC標準船模多截面的二維速度場進行了測量,并對其速度場和流動特征等進行了分析。Falchi等[29]應用PIV對雙體船斜航狀態下的精細流場進行了測量,測量結果顯示了船體斜航下的瀉出渦結構等流動特征。

圖3 水下PIV裝置[22]Fig.3 Underwater PIV device[22]
層析PIV可用于研究船舶的三維流動精細流場,測量空間內所有方向的速度、雷諾應力等流動特征。IIHR的Yoon等[30]在拖曳水池中應用三維三速度分量(3D-3C)層析PIV對DTMB 5415船模繞流場進行了測量。
應用PIV技術進行船模繞流場測試的試技術相對成熟。近年來,隨著PIV技術的發展,其開始被應用于實船繞流場精細測量。為探索實船航行性能,意大利學者基于PIV 技術對Nave Bettica號軍艦舭龍骨繞流場進行了測量[31-33],這對PIV技術在實船中的應用具有重要意義。 同時,需指出的是,實船流場測試也存在諸多問題。例如,實船實尺度條件下拍攝范圍和激光強度受限、實際海域環境雜質難以剔除、目標區域系統標定問題、實海域粒子圖像的自適應優化問題等。基于PIV的實船繞流場進行測試分析有待進一步研究。
艉流場是船舶繞流場中非常重要的部分,其體現了船舶推進器的性能。基于PIV技術對船舶艉流場進行測量,可以為船舶快速性能、推進性能評估提供重要依據。同時,通過PIV,螺旋槳盤面伴流場分布特征、艉流場區域的流動分離、漩渦結構的空間分布等研究也有了新進展。Felli等[34]應用層析PIV對螺旋槳轂渦、梢渦以及槳后流場進行了測量。佘文軒等[35]為了解決船舶艉流場復雜流動機理認知難題,在拖曳水池中應用大型水下三維粒子圖像測速系統(圖4),對設計工況下不同截面處的船舶艉流場進行了測量,結果如圖5所示。圖中,Y軸與Z軸坐標、螺旋槳半徑R、軸線速度u與航速U均做了無量綱處理,由圖可見舭渦、螺旋槳轂帽渦以及“鉤狀”速度等值線等流動結構。
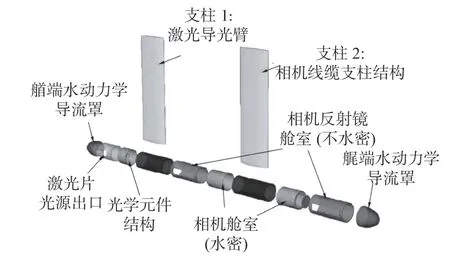
圖4 SPIV系統結構分解示意圖[35]Fig.4 SPIV system structure decomposition[35]

圖5 不同截面位置處的船舶艉流場PIV測量圖[35]Fig.5 PIV measurement diagram of ship stern flow field at different section positions[35]
3.2 基于PIV的水下航行器繞流場研究
潛艇作為典型的水下航行器,在水下航行時,其各項性能(操縱性、隱蔽性、快速性等)尤為重要。應用PIV技術對潛艇在水下航行時的精細流場進行測量,可以獲得潛艇周圍流場的速度場、渦量場等。
在潛艇精細流場測量中,潛艇在自由表面下的浸深、潛艇的適航裝置、粒子的布撒、激光器的角度、PIV測量系統中的高速攝像機等都影響著精細流場的測量。Fu等[36]應用PIV在旋臂水池中對美國海軍研究局(ONR)的Body-1潛艇模型進行了精細流場測試,并研究了潛艇的流場控制。相較于隨車式PIV,固定式PIV試驗的測量截面與船舶坐標系的橫截面不一致,導致固定式PIV具有一定的局限性。Fureby等[37]對于水下航行器精細流場的測量研究也具有指導意義(圖6)。
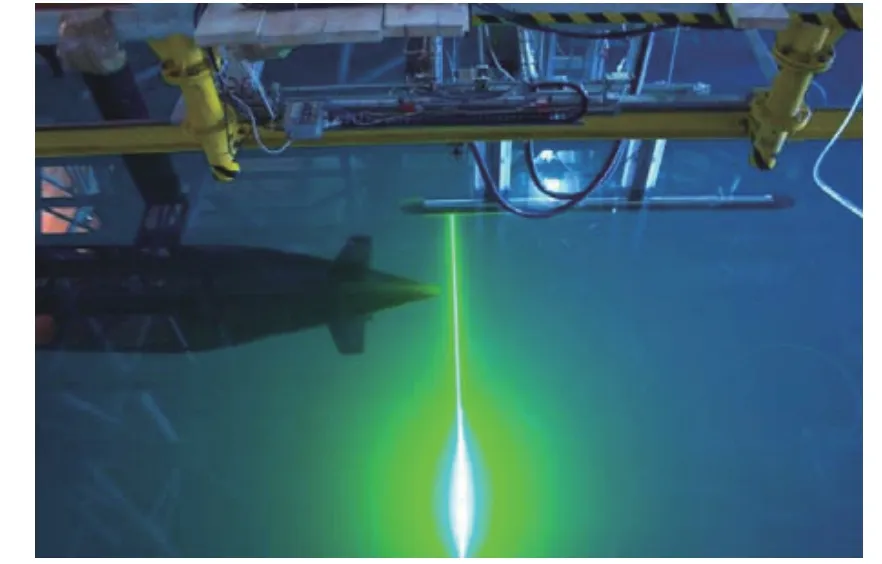
圖6 基于SPIV的水下航行器流場測量[37]Fig.6 Flow field measurement of underwater vehicle based on SPIV[37]
除了在水池中對水下航行器的流場進行研究外,di Felice[38]在低速風洞中應用PIV對不同工況下潛艇的周圍流場、湍流特性及渦結構等流場特性進行了測量研究,并將測量結果與數值模擬結果進行了對比分析。
在國內對于水下航行器的PIV測試研究中,趙峰等[39]應用PIV對水下航行體5種細部變化的艉附體與主回轉體連接形式的設計模型進行了測試分析,并且借助流場不均勻度系數定量評估了推進器所在剖面的伴流場。其研究結果對水下航行器艉附體和推進器的設計優化具有指導意義。
3.3 基于PIV的船舶空氣流場研究
以艦船為例,其空氣流場是艦載機的起降環境及艦載機海上作業的主要場所。在作業中由于受到自然風、艦船運動及其上層建筑等因素的影響,空氣流場十分復雜。復雜的空氣流場為艦載機起降增加了難度,其中“徒壁效應”和“臺階效應”等現象的空氣流場使艦載機的操縱變得尤為困難。應用PIV準確測量艦船空氣流場,對于保障艦載機海上作業的安全性及艦船空氣流場的特性研究具有重要意義。
艦船空氣流場研究為艦載機起降的安全性提供了保障,包括為艦載機的起降路線提供指導、規避起降風險。Wadcock等[40]應用PIV技術對串聯旋翼直升機和艦船空氣流場進行了三維速度場測量,詳細描述了串聯旋翼直升機在同一著陸點和不同零偏航角下機?艦耦合的空氣流場的流動特性,測量結果為旋翼機艦上作業的規劃提供了指導。趙維義義[41]應用PIV測試技術在實驗室的風洞中對艦船空氣流場進行了測量。試驗表明機庫及上層建筑物對飛行甲板上方區域的流場影響較大。
船舶空氣流場研究也為船舶設計優化做出了貢獻,對于一部分船舶而言,空氣流場的品質是影響其水動力性能的重要因素。Rahimpour等[42]采用1:522的極地破冰船模型,對甲板上方空氣流場進行了試驗研究,應用PIV獲得了多個截面的定量流場數據,并比較了均勻流和模擬大氣邊界層對破冰船空氣流場流動結構的影響。Bardera等[43]應用PIV對不同風向下的LHD模型的船舶空氣流場進行了測量研究,對比分析了數值計算與試驗結果,試驗裝置如圖7所示。孫寒冰等[44]應用PIV對在相同風速、不同風向角下的某型客滾船的空氣流場進行了研究,分析船舶所受阻力的變化,得到了不同風向角下流場速度矢量圖,試驗時相機安裝如圖8所示。

圖7 模型船在風洞中的試驗示意圖[43]Fig.7 Schematic diagram of model ship test in wind tunnel[43]

圖8 PIV試驗時相機安裝[44]Fig.8 Camera installation during PIV test [44]
4 結論及展望
為了通過更高效率、更精確的方式獲取真實的流場信息,使PIV能更有效地服務于船舶工程領域,PIV硬件系統、PIV圖像處理技術、以及PIV技術在船舶領域的應用方面仍有待改進。
在PIV測速硬件系統方面,圖像采集系統及激光照明系統的參數條件較成熟,但設備成本較高,導致高端PIV系統的普及陷入瓶頸。目前,國內外常用的PIV系統有2種:一種是由連續激光器和高速相機組成的具有高時間分辨率的TRPIV系統,其可高效、高精度地對非定常流場進行動態二維測量;另一種是由雙脈沖激光器、2臺高速相機組成的低頻SPIV系統,其可實現待測定常流場平面內的時均三維速度矢量的獲取。高端PIV系統,例如全息PIV、層析PIV等僅在國內外極少數大型實驗室得以應用。未來硬件系統的發展趨勢將集中在2個方向:其一,降低硬件設備成本,這將是PIV系統廣泛應用于中小研究機構的必要途徑;其二,在保證時序測量的基礎上,大力發展可獲取高分辨率大范圍體空間流場信息的PIV系統,以擴展圖像獲取的空間分辨率和空間尺度水平,尤其在體空間流場的測試領域,目前層析PIV的測量區域普遍較小(空間厚度在10 mm左右),近壁面流場獲取困難,無法獲取具有強烈三維空間特性的流場信息。
PIV系統的應用擴展不僅僅依賴于硬件設備的發展及設備成本的降低,更重要的是圖像處理算法的精進與普及。目前,PIV圖像處理普遍采用的是WIDIM算法,但該算法以判讀窗口為最小單位進行速度矢量計算,針對小尺度流動結構與近壁面流動細節的計算精度并不理想。各PIV系統公司在這些方面也爭相取得突破,但擁有應用于空間流場信息計算算法的研究機構少之又少,如果可降低空間流場算法的計算門檻與資源消耗,將會極大程度地推動各類PIV系統的普及與應用。上述算法僅針對速度矢量這種最低階的流場信息的計算,在未來的算法發展中,更高階流動信息的獲取,例如漩渦分布、壓力分布、湍流特性、模態分解等,將更有利于流場本質的獲取與分析。此外,流場分析與信號處理技術的交匯碰撞、深度學習在PIV粒子圖像處理領域的應用、多相流邊界層的自動掩膜等,均有可能實現更高效、更高精度的流場信息捕捉。
在國內船舶與海洋工程領域,PIV在精細流場的測試與研究中的應用仍處于起步階段,還存在一些復雜的流動問題有待進一步研究。例如:物體抨擊入水、近自由面氣液兩相流動、螺旋槳及泵噴等旋轉機械內流場測試、流動機理角度分析空泡空化、高速射流與微氣泡流動測試、水下爆炸沖擊載荷及氣泡脈動等問題。應用PIV可深入探索上述問題,進行復雜流場精細化測量,從流動機理的角度探究及優化流場品質。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
船舶(2021年4期)2021-09-07 17:32:22
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
科技傳播(2019年22期)2020-01-14 03:06:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
