輸電線路無人機自主巡檢航跡優(yōu)化研究
2022-01-17 08:55:22國網(wǎng)福建省電力有限公司漳州供電公司湯奕琛沈如榕
電力設(shè)備管理 2021年15期
國網(wǎng)福建省電力有限公司漳州供電公司 孫 嬙 湯奕琛 沈如榕
輸電線路分布在城市、鄉(xiāng)村、山地等各個區(qū)域,為了保障居民安全,當(dāng)前新建的輸電線路通常會選擇地勢更加惡劣的區(qū)域。由于輸電線路、桿塔部件等所處環(huán)境十分惡劣,在長期惡劣環(huán)境的威脅下,會出現(xiàn)不同程度的磨損、自爆等嚴(yán)重的損害,導(dǎo)致輸電線路的運行質(zhì)量嚴(yán)重降低,更會進一步出現(xiàn)輸電安全事故問題。因此,對不同環(huán)境下的輸電線路進行定期或不定期地檢查和維護,其在維護輸電安全中具有十分重要的價值和意義。通過合理的巡檢可以對輸電線路的運行情況以及被保護區(qū)域內(nèi)環(huán)境的變化情況等實時掌握,從而在最短的時間內(nèi)找出存在的潛在問題,以此防止事故的進一步擴大,保障供電的安全和穩(wěn)定[1]。當(dāng)前,隨著航空工業(yè)領(lǐng)域的發(fā)展速度不斷加快,采用無人機作為線路巡檢的裝置設(shè)備之一,是近幾年來相關(guān)領(lǐng)域研究人員重點關(guān)注的話題。當(dāng)前無人機在220kV 及以上典型輸電線路上對輸電線路進行檢測已經(jīng)十分常見,并且具備成本低、自動化程度高、靈活性強等優(yōu)勢。但由于當(dāng)前部分無人機在進行巡檢的過程中其軌跡的規(guī)劃上存在問題,進而使得巡檢的質(zhì)量和效率都受到了不同程度上的影響[2]。因此,針對這一問題,本文開展輸電線路無人機自主巡檢航跡優(yōu)化研究。
1 輸電線路無人機自主巡檢航跡優(yōu)化設(shè)計
1.1 確定巡檢航跡規(guī)劃約束條件
為了實現(xiàn)對無人機巡檢航跡的全面優(yōu)化,應(yīng)在開展相關(guān)設(shè)計研究前,進行其巡檢航跡規(guī)劃約束條件的確定。在此過程中,應(yīng)提取影響無人機巡檢航跡的因素,作為性能參數(shù),具體包括巡檢航跡執(zhí)行的任務(wù)、無人機在初始化狀態(tài)下與執(zhí)行任務(wù)狀態(tài)下的性能參數(shù),將提取的參數(shù)值作為約束條件指令集合,進行約束條件的進一步描述[3]。選定的巡檢航跡規(guī)劃約束條件之一為最大航程,將此條件表示為Vmax,設(shè)定無人機巡檢航跡的整條航跡上一共存在m 個轉(zhuǎn)接點,則無人機的巡檢航跡規(guī)劃可用下述圖1表示。
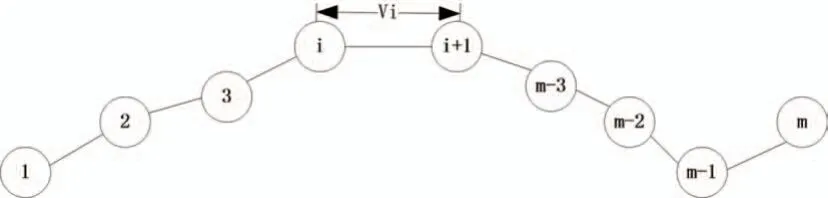
圖1 無人機巡檢航跡規(guī)劃最大航線
假設(shè)無人機在執(zhí)行任務(wù)時,其中第i 段(例如1→2)的航程距離表示為vi,則對應(yīng)的總里程應(yīng)當(dāng)滿足下述條件:

公式中:V 表示為無人機飛行總里程,計算單位為km。除上文提出的約束條件,還應(yīng)當(dāng)根據(jù)前端執(zhí)行任務(wù)的需求,進行無人機最小步長的設(shè)計。例如,無人機在飛行時或執(zhí)行某項巡檢任務(wù)時,機體直線飛行會受到慣性與風(fēng)阻等外界作用力的影響,而在此過程中機體方向移動的最小距離可以表示為最小步長,使用L 表示,在進行步長約束時,應(yīng)當(dāng)滿足的條件為:lj≥Lmin,其中l(wèi)j表示為最小步長節(jié)點;Lmin表示為最小步長。綜合上述內(nèi)容,完成對約束條件的設(shè)計。
1.2 建立巡檢航跡的表達式及目標(biāo)函數(shù)
確定巡檢航跡規(guī)劃約束條件后,在設(shè)定的空間當(dāng)中找出符合上述約束條件的巡檢航跡,并在相同空間當(dāng)中找出一系列航跡節(jié)點,計算得出其相應(yīng)的路徑,將任意兩個相鄰的航跡節(jié)點用線段進行連接。其中,每一條巡檢航跡均可以利用L 集合表示,L集合的表達式為:

公式(3)中,S 表示為起點;E 表示為終點;Di表示為巡檢航跡中的各個點,i=1,2,3,……,n-1。采用一系列節(jié)點用來對無人機的巡檢航跡進行表示能夠結(jié)合無人機在真實作業(yè)環(huán)境中的需要,結(jié)合其期望值對巡檢航跡上的規(guī)劃節(jié)點數(shù)量進行動態(tài)調(diào)整。同時,通過上述公式(3)的構(gòu)建,能夠?qū)⒀矙z航跡優(yōu)化問題,轉(zhuǎn)變?yōu)閷Χ鄠€軌跡節(jié)點優(yōu)化問題,實現(xiàn)對其優(yōu)化復(fù)雜程度的進一步降低。同時,在進行問題劃分的過程中,還應(yīng)當(dāng)在明確上述規(guī)劃約束條件的基礎(chǔ)上完成,從初始問題提出到實現(xiàn)整個巡檢航跡的優(yōu)化,均需要對其是否滿足相應(yīng)的約束條件進行判斷。假設(shè)在一條包含n+1個的目標(biāo)點巡檢航跡當(dāng)中,已知該路徑的某一段的具體長度值時,其起飛點為無人機自主巡檢航跡作業(yè)的起飛基地,則其目標(biāo)函數(shù)可表示為:

公式(4)中,f 表示為目標(biāo)函數(shù);pi表示為某一路徑i 段的長度值;h 表示為懲罰函數(shù),根據(jù)上述論述可知為實現(xiàn)對巡檢航跡的優(yōu)化,需要求解出上述公式(4)目標(biāo)函數(shù)的最小值,以此實現(xiàn)對無人機自主巡檢航跡優(yōu)化目標(biāo)函數(shù)的構(gòu)建。
1.3 生成最優(yōu)巡檢航跡路線
按照本文上述論述內(nèi)容,通過相應(yīng)的運算,實現(xiàn)對巡檢航跡表達式和目標(biāo)函數(shù)的建立后,為了方便無人機自主巡檢對航跡的識別,將最終得到的最優(yōu)巡檢航跡路線以文件的形式生成。生成的最優(yōu)巡檢航跡路線文件必須是無人機內(nèi)部控制裝置能夠識別的文件格式,同時為了確保生成的效率,選擇對上述完成處理的航跡數(shù)據(jù)進行預(yù)處理操作。將數(shù)據(jù)當(dāng)中存在使航跡出現(xiàn)短時間內(nèi)移動量較大的數(shù)據(jù)點清除[4-6]。同時,在完成對數(shù)據(jù)的預(yù)處理后,還應(yīng)當(dāng)將各個保留的航跡數(shù)據(jù)與對應(yīng)的路網(wǎng)結(jié)構(gòu)進行匹配,并根據(jù)具體無人機作業(yè)的實際要求,通過上報次數(shù)、可行度等參數(shù),對生成的航跡路線是否存在誤差進行判斷,并將存在的相同航跡進行合并處理。將無人機與無人機控制平臺以無線傳輸?shù)姆绞竭B接,在控制平臺上明確無人機在巡檢過程中的路網(wǎng)數(shù)據(jù)交點、設(shè)施標(biāo)注點等,并以上述航跡數(shù)據(jù)為基礎(chǔ),生成未審核的巡檢航跡規(guī)劃數(shù)據(jù),在數(shù)據(jù)發(fā)生改變的過程中,涉及的航跡規(guī)劃應(yīng)當(dāng)進行相應(yīng)的更新,以此實現(xiàn)對航跡的自主調(diào)節(jié),得到最優(yōu)的巡檢航跡路線[7-8]。
2 優(yōu)化前后應(yīng)用效果對比
結(jié)合本文上述論述的內(nèi)容,為實現(xiàn)對優(yōu)化后無人機自主巡檢軌跡在真實環(huán)境當(dāng)中是否具備更高的可行性和精度,本文選擇以某供電企業(yè)當(dāng)前正在開展的項目為例,該項目名稱為輸電線路輕量化無人機智能巡檢系統(tǒng)示范應(yīng)用,將本文上述優(yōu)化后的無人機自主巡檢航跡應(yīng)用到該項目當(dāng)中,并將其與優(yōu)化前巡檢航跡的應(yīng)用效果進行對比,實現(xiàn)在現(xiàn)場驗證本文優(yōu)化后的巡檢軌跡條件下,巡檢數(shù)據(jù)的可行性及精度。假設(shè)在輸電線路上包含12個待測點,已知無人機起飛的坐標(biāo)為(0,0),降落點的坐標(biāo)為(3.8,4.6)。在每個待測點之間僅選擇兩個點作為研究對象,按照本文上述優(yōu)化思路,對該線路上的無人機自主巡檢航跡進行優(yōu)化。完成優(yōu)化后,將優(yōu)化前后巡檢航跡輸入到無人機的控制中心,并按照航跡完成飛行,對比優(yōu)化前后無人機能夠?qū)崿F(xiàn)在待測點上方精準(zhǔn)飛過的待測點個數(shù),并將實驗結(jié)果記錄如表1所示。
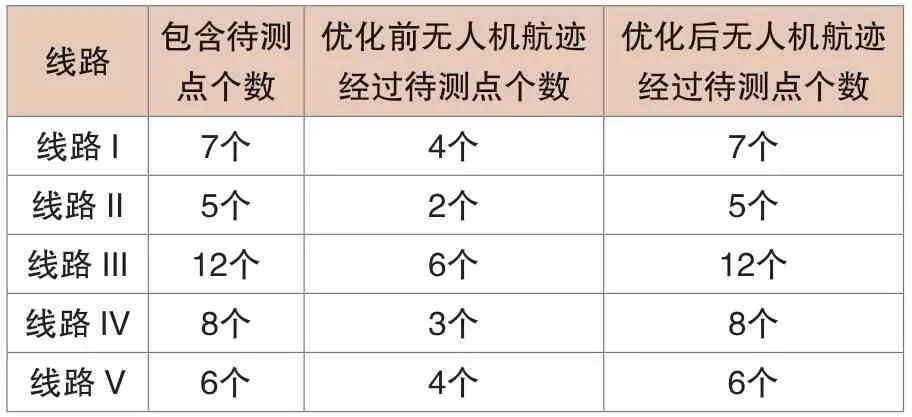
表1 巡檢航跡優(yōu)化前后實驗結(jié)果記錄表
從表1記錄的數(shù)據(jù)可以看出,優(yōu)化后無人機的航跡能夠經(jīng)過所有該線路上包含的待測點,而優(yōu)化前無人機航跡僅能夠經(jīng)過少部分線路上包含的待測點。因此,通過上述應(yīng)用實驗證明,本文優(yōu)化后的無人機自主巡檢航跡能夠?qū)崿F(xiàn)對各個待測點的精準(zhǔn)定位,并生成精度更高的巡檢航跡,本文上述設(shè)計的優(yōu)化思路具有較高的可行性和精度。除此之外,將本文上述實現(xiàn)輸電線路無人機自主巡檢航跡優(yōu)化的思路應(yīng)用到實際輸電線路的巡檢工作當(dāng)中,能夠進一步形成輸電線路無人機智能巡檢標(biāo)準(zhǔn)化作業(yè)流程,從而在一定程度上提高供電企業(yè)對輸電線路的巡檢效率,確保巡線的安全[9-10]。
3 結(jié)語
無人機巡檢一直是220kV 及以上典型輸電線路智能化應(yīng)用的必要手段之一,并且逐漸受到人們的關(guān)注。但當(dāng)前階段無人機的巡檢作業(yè)仍然存在缺乏規(guī)范巡檢路徑,缺乏合理作業(yè)流程的問題。針對這一問題,本文開展輸電線路無人機自主巡檢航跡優(yōu)化研究,并設(shè)計了一種全新的航跡優(yōu)化思路,通過實驗證明了其可行性和精度。在今后的研究中,針對無人機巡檢航跡的實時飛行高度改變、三維巡檢路徑規(guī)劃等問題進行更加深入的研究,從而保證無人機巡檢與各個目標(biāo)物之間的高度穩(wěn)定,實現(xiàn)無人機巡檢的自動化和智能化。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41