基于無差拍電流預測控制的六相PMSM容錯控制
2022-01-19 04:55:10徐磊,許強
導航與控制 2021年5期
關鍵詞:控制策略
徐 磊,許 強
(華中科技大學,武漢 430074)
0 引言
近年來,大功率化和高可靠性化成為交流電機變頻傳動系統(tǒng)的主要發(fā)展方向之一,而其中較為熱門的提高交流變頻調(diào)速功率和可靠性的方案就是采用多相電機。與三相電機相比,多相電機具有如下優(yōu)勢[1-3]:1)轉(zhuǎn)矩脈動幅值與電機相數(shù)成反比,電機振動和噪聲減小;2)每相輸出功率低,降低了對開關器件的要求,可以實現(xiàn)低壓大功率;3)電機冗余性強,可以實現(xiàn)容錯運行,適合在要求高可靠性的場合下應用;4)具有多個控制自由度,可以施加更多的高性能控制策略。基于多相電機具有以上優(yōu)點,對多相電機的高性能控制策略進行研究具有很大的工程意義和價值。
多相電機的控制主要分為正常運行下的控制和發(fā)生斷相故障情況下的控制。其中,在正常運行下的控制策略方面,國內(nèi)外學者已經(jīng)取得了很多的研究成果。文獻[1]提出多相坐標變換矩陣的方法,實現(xiàn)了六相逆變器供電的感應電機解耦控制。文獻[2]利用多相坐標變換理論,首次將磁場定向矢量控制策略引入到多相電機驅(qū)動系統(tǒng)。而對多相電機缺相故障情況下的容錯控制同樣是近年來較為熱門的研究方向,目前比較常用的容錯控制方式大致分為兩種:一種是基于電流滯環(huán)的控制策略,基于故障前后定子磁動勢不變的原則,以不同的優(yōu)化目標為約束條件求解出缺相后剩余相電流的參考值,然后利用滯環(huán)比較的方式進行控制。這種控制方式會帶來滯環(huán)控制的固有缺點:開關頻率不固定以及電流和轉(zhuǎn)矩的脈動較大。另一種是在求解出剩余相繞組電流參考值的基礎上,建立缺相后五相電機的數(shù)學模型,通過構造新的旋轉(zhuǎn)坐標系實現(xiàn)電機缺相后的矢量解耦控制。這種控制方法的電流內(nèi)環(huán)大多采用的還是PI控制器,但是傳統(tǒng)的PI控制器在階躍響應過程中會有超調(diào),并且在對給定電流的跟隨能力和動態(tài)響應上性能不高,在高功率、低電壓、大電流的應用場合,PI控制器無法兼顧系統(tǒng)的快速響應性和穩(wěn)態(tài)誤差小的要求。
因此,針對六相永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)一相斷路容錯控制中傳統(tǒng)PI控制器的缺陷,本文將無差拍電流預測控制引入了六相永磁同步電機容錯控制,提升了系統(tǒng)的電流環(huán)響應帶寬,改善了電流的超調(diào)和快速響應性能,并通過仿真驗證了方法的可行性。
1 剩余相參考電流求解
本文所述的六相PMSM拓撲結構如圖1所示,兩套定子繞組ABC和UVW之間電角度相移30°并以W相開路為例,缺相故障時兩套繞組中性點連接且不連至逆變器端。
同時為了簡化分析,對六相PMSM做出如下假設:
1)磁路線性,忽略磁滯和渦流損耗;
2)不計定子表面齒槽的影響,轉(zhuǎn)子上無阻尼繞組;
3)繞組正弦分布;
4)忽略電機漏感。
本文采用基于缺相前后定子總磁勢不變原則,雙三相PMSM缺相前定子總磁勢為[4-5]


式(2)中,Im為電流的幅值,θ為A相電流相角。當W相開路時對比式(1)和式(2),為了保持定子總磁勢不變,剩余五相電流必須滿足
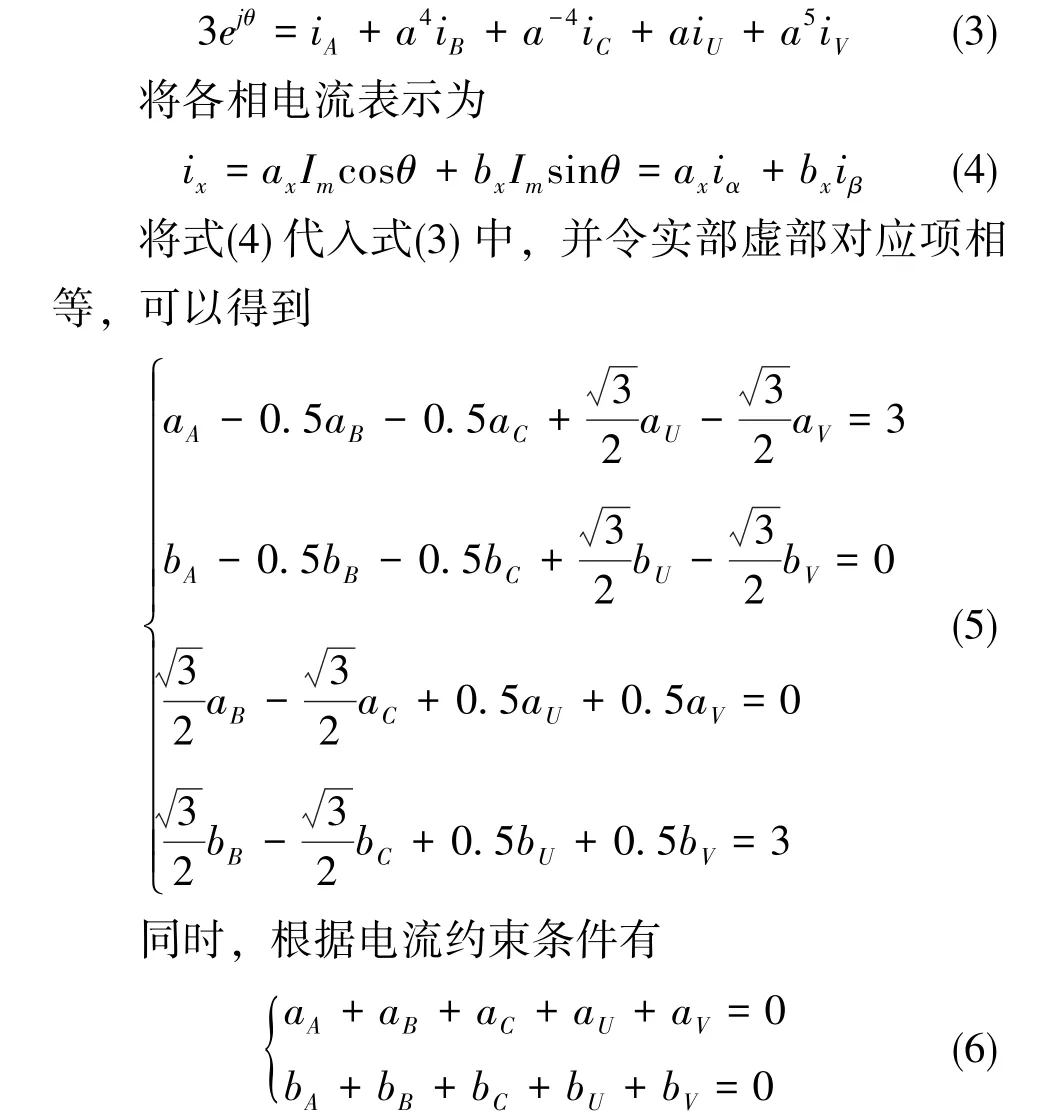
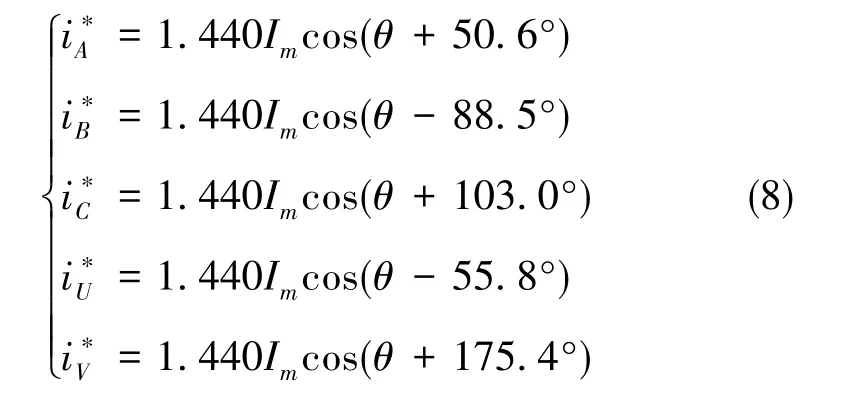
顯然,對于式(5)和式(6)組成的方程組,其解并不唯一,這時一般采用最優(yōu)化方法進行求解,通常使用的優(yōu)化目標有兩個,一是定子銅損最小,二是定子電流幅值最小。本文以定子電流幅值最小為目標,構造出如下的目標函數(shù)

利用Matlab的最優(yōu)化工具箱來求解出滿足上述方程組并使得目標函數(shù)J達到最小的解,可以得到基于磁動勢不變原則下以定子電流幅值最小為優(yōu)化目標的六相PMSM缺相后剩余五相繞組參考電流值
2 矢量解耦控制
2.1 變換矩陣的確定
根據(jù)矢量空間解耦的建模理論[3],缺相后六相電機的電壓、電流、磁鏈矢量可以通過式(9)所示的靜止變換矩陣變換到一個參與機電能量轉(zhuǎn)換的α-β子平面和一個只產(chǎn)生銅損的z1-z2-z3諧波子平面。

根據(jù)坐標變換的磁動勢不變和功率不變原則,α、β繞組總磁勢和剩余五相繞組總磁勢應該相等,如式(10)所示。根據(jù)定子繞組之間的位置關系,向量α、β可以很容易確定下來。
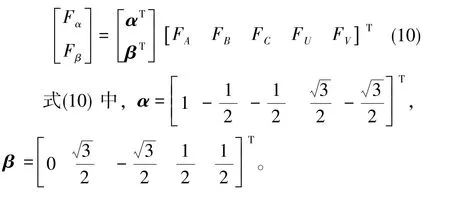
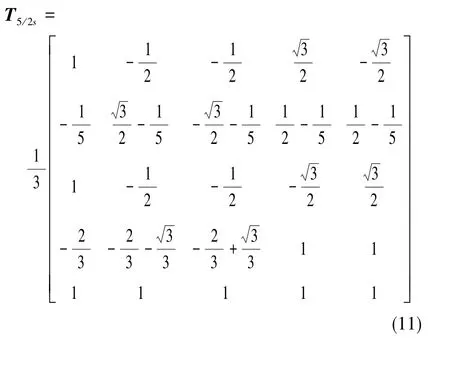
再由向量z1、z2、z3和向量α、β之間的正交關系以及電流約束條件,可以求解出式(11)所示的靜止變換矩陣[6-7]
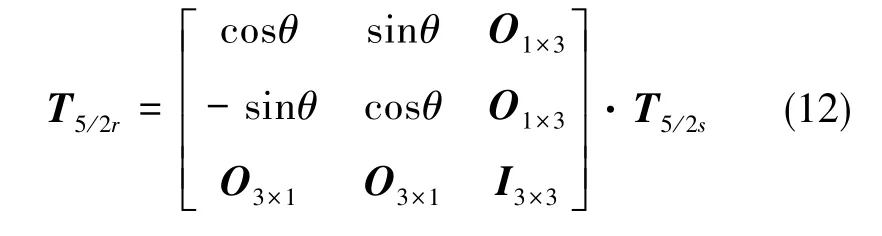
得到靜止變換矩陣后,由于只有α-β子空間參與機電能量轉(zhuǎn)換,因此只需對α-β子空間的變量進行Park變換。所以,從五相自然坐標系變換到兩相旋轉(zhuǎn)坐標系的總變換矩陣T5/2r為
2.2 缺相六相PMSM的數(shù)學模型
電機W相開路時,剩余五相在自然坐標系下的電壓和磁鏈方程可以寫為
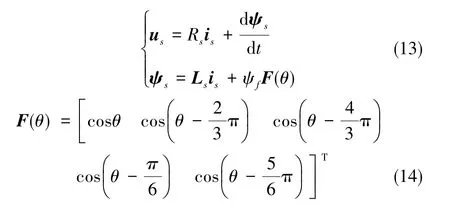
式(13)中,Rs為電機電阻,Ls為剩余五相的電感,ψf為轉(zhuǎn)子磁鏈。對式(13)的電壓和磁鏈方程兩邊同時乘以旋轉(zhuǎn)變換矩陣T5/2r,得到d-q坐標系和z1-z2-z3平面下的電壓和磁鏈方程,如式(15)和式(16)所示[8]。
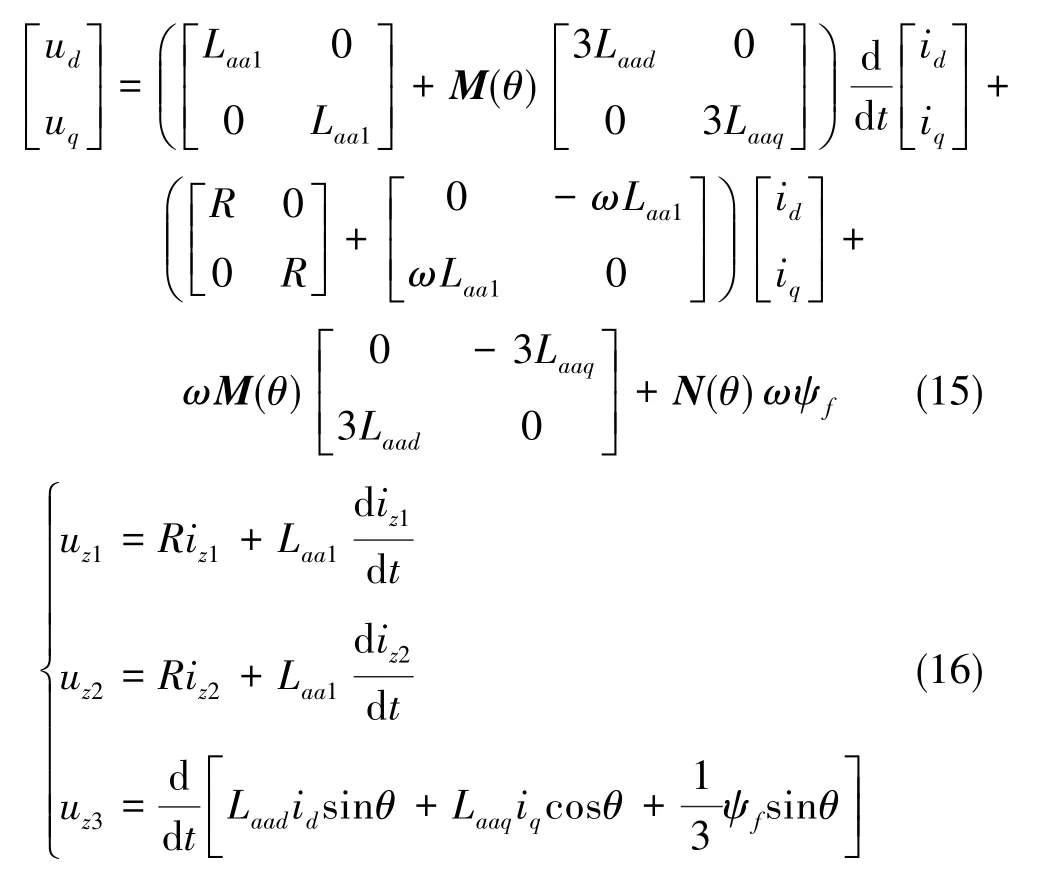
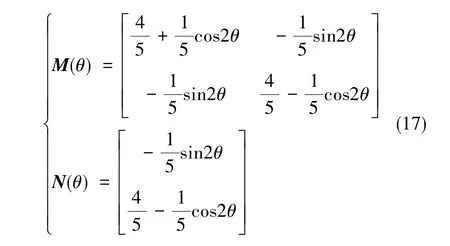
式(15)、 式(16)中, Laa1為定子繞組的漏自感,Laad和Laaq分別為d軸、q軸主自感,ω為電機轉(zhuǎn)速, M(θ)和 N(θ)滿足
2.3 缺相后的解耦容錯控制
由式(15)可知,由于電感系數(shù)矩陣和永磁體磁鏈投影矩陣的不對稱性,導致d軸、q軸之間仍然含有較多交叉耦合項,無法直接進行矢量控制,因此需要引入新的旋轉(zhuǎn)坐標系來實現(xiàn)解耦控制,對式(15)兩邊同乘 M-1(θ), 可得
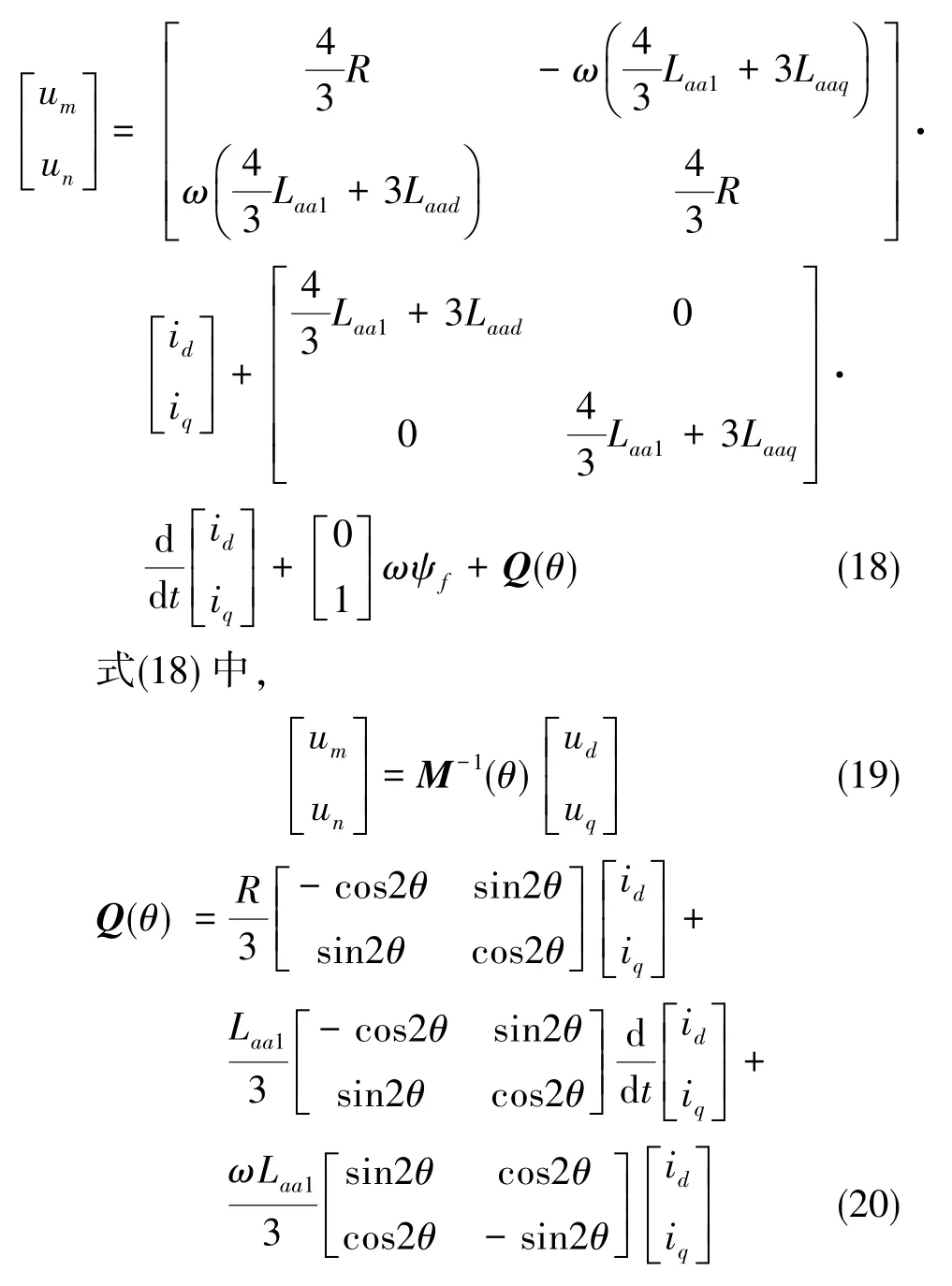
觀察式(20), 如果 Q(θ)=0, 則 m 軸、 n軸之間實現(xiàn)完全解耦。所以為了消除Q(θ)的影響,可以將Q(θ)視作擾動項,通過提高電流環(huán)帶寬的方法來克服擾動的影響,從而實現(xiàn)W相開路故障下六相PMSM的矢量控制,控制系統(tǒng)框如圖2所示。
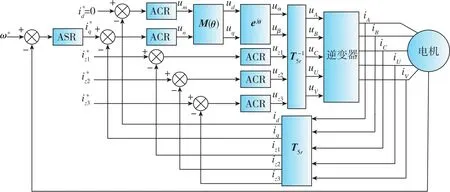
圖2 缺相故障下六相PMSM矢量控制系統(tǒng)Fig.2 Six-phase PMSM vector control system in the case of the single-phase open circuit fault
3 無差拍電流預測控制
為了提高電流內(nèi)環(huán)的跟隨性能,針對傳統(tǒng)PI控制器會產(chǎn)生電流超調(diào)且動態(tài)響應性能較差的缺點,對電流環(huán)采用電流預測控制,設計無差拍電流預測控制器代替PI控制器,對式(20)采用一階Euler公式進行離散化處理并化簡,可得

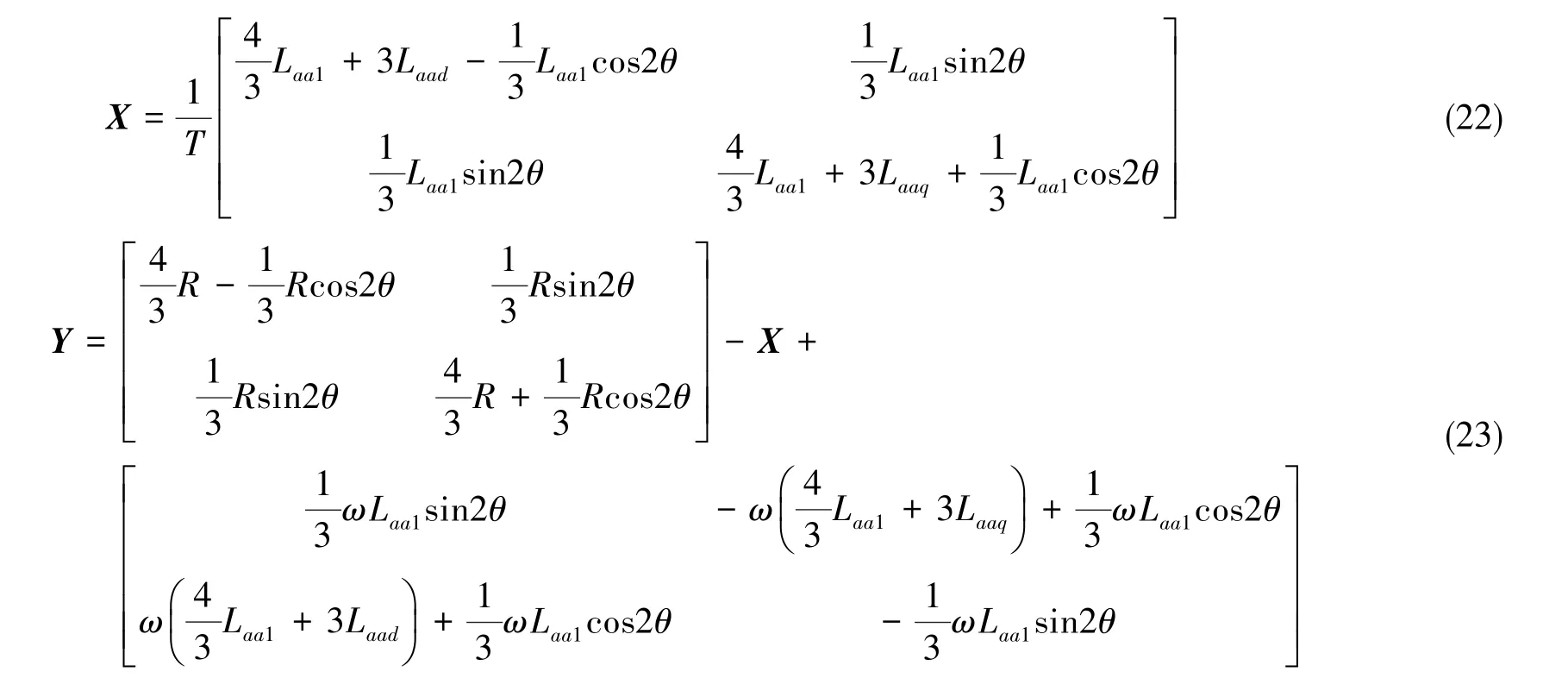
式(22)中, T采樣時間。 令id(k+1)=、 iq(k+1)=, 再采樣kT時刻的電流值id(k)和iq(k), 代入式(21)中,即可計算出當前時刻應當施加的電壓參考值。利用SVPWM或SPWM調(diào)制方法合成出電壓參考值,在理想情況下kT~(k+1)T時刻施加在電機上的電壓就是應該施加的電壓參考值,從而使得(k+1)T時刻的電流值跟蹤上參考電流。無差拍電流預測控制框圖如圖3所示。
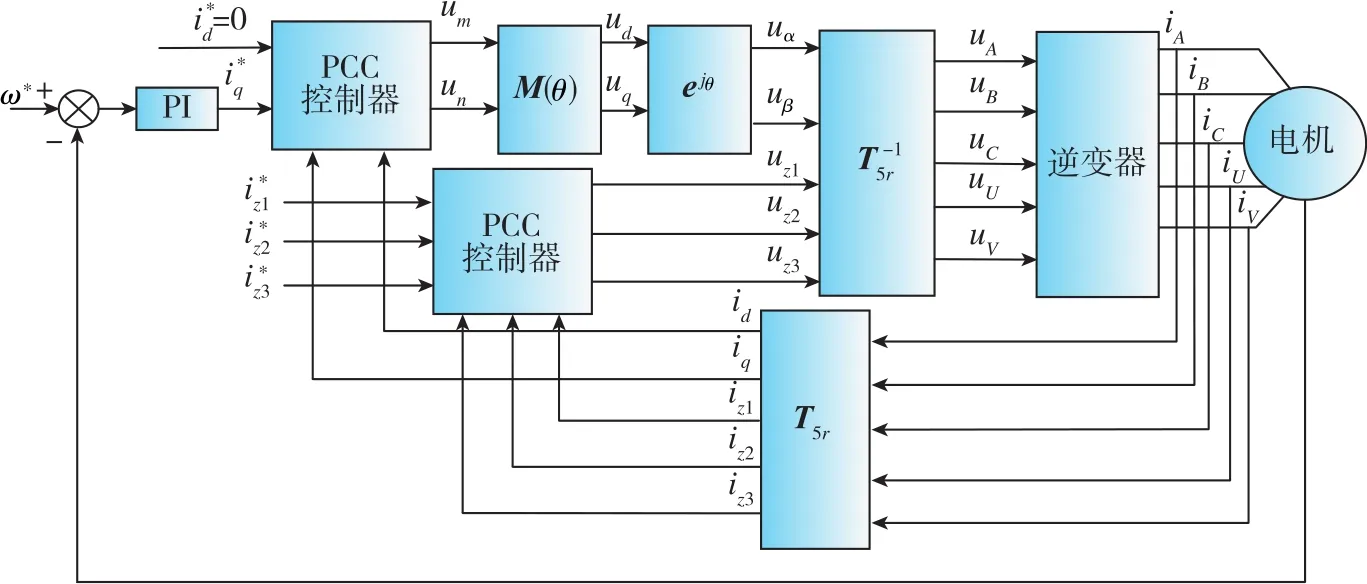
圖3 一相開路六相PMSM無差拍電流預測控制系統(tǒng)Fig.3 Six-phase PMSM deadbeat predictive current control system in the case of the single-phase open circuit fault
在實際控制系統(tǒng)中,由于電流采樣時刻和PWM占空比實際更新時刻存在固有的一拍延時,因此理想的無差拍控制算法應用在實際系統(tǒng)中需要考慮當前周期施加的電壓對電流造成的影響,所以需要對固有一拍延時進行延時補償。首先,根據(jù)當前周期施加的電壓值和kT時刻的電流采樣值,代入電壓方程得到(k+1)T時刻的電流預測值,再利用預測的電流值來進行無差拍控制,將(k+2)T時刻希望達到的電流值用當前周期的id和iq參考值來代替,從而可以得到(k+1)T時刻應該施加的電壓值。這樣改進之后,理想情況下,電流在滯后兩個周期后跟蹤上指令值,而兩拍跟蹤也是目前電機實際控制系統(tǒng)中所能達到的最優(yōu)效果。但同時這種算法對電機參數(shù)十分敏感,控制的魯棒性較差。在實際控制系統(tǒng)中,需要結合在線參數(shù)辨識和自抗擾控制技術來增強算法的魯棒性。
4 仿真結果分析
為了驗證本文提出的解耦矢量容錯控制方式和無差拍電流預測控制的有效性,在Matlab/Simulink中搭建系統(tǒng)仿真模型。電機參數(shù)如表1所示。
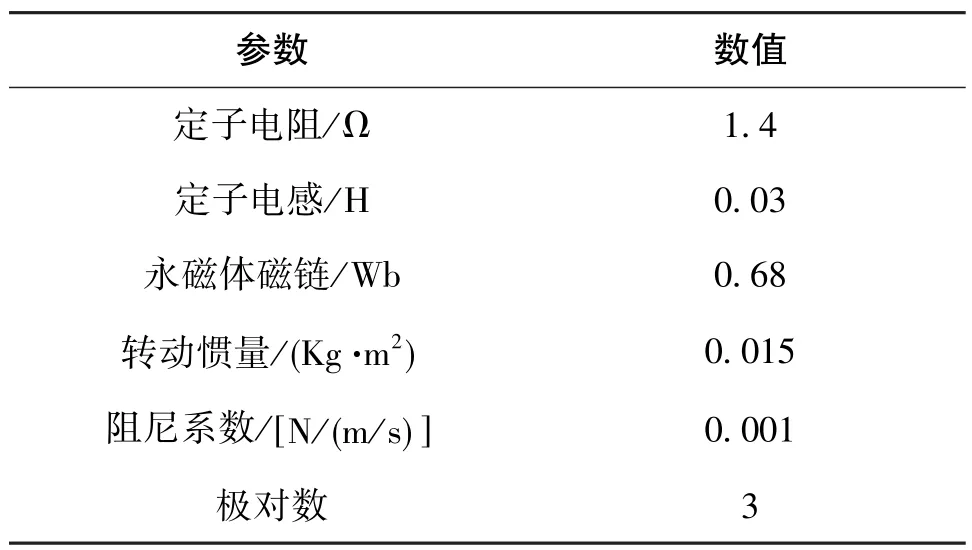
表1 電機參數(shù)Table 1 Parameters of PMSM
首先,為了驗證本文提出的容錯控制方式的有效性,六相PMSM正常空載起動,電機給定機械角速度設為50rad/s,0.2s時突加50N·m恒定負載,并在發(fā)生缺相故障之前采用基于雙d-q坐標系下的矢量控制正常運行,在0.4s時系統(tǒng)發(fā)生W相斷相故障,系統(tǒng)沒有施加任何優(yōu)化的容錯控制方法,在0.8s時直接切換為施加本文提出的容錯控制策略,采用傳統(tǒng)PI控制器,仿真結果如圖4~圖6所示。
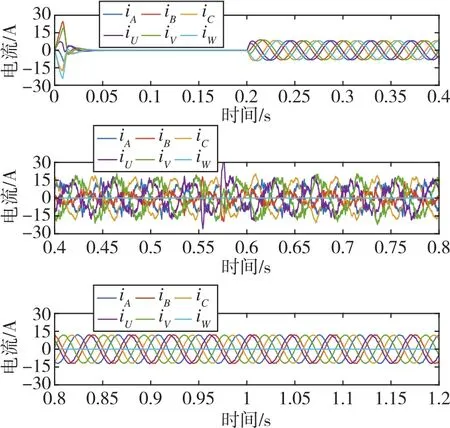
圖4 定子端的六相電流曲線Fig.4 Six-phase current curves at stator end
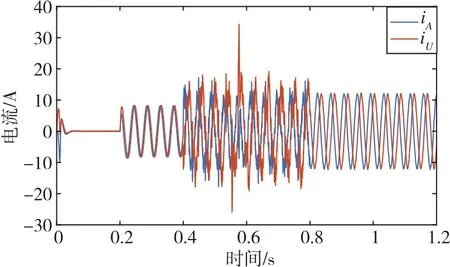
圖5 定子端的A相和U相電流波形Fig.5 Current waveforms of phase A and phase U at stator end
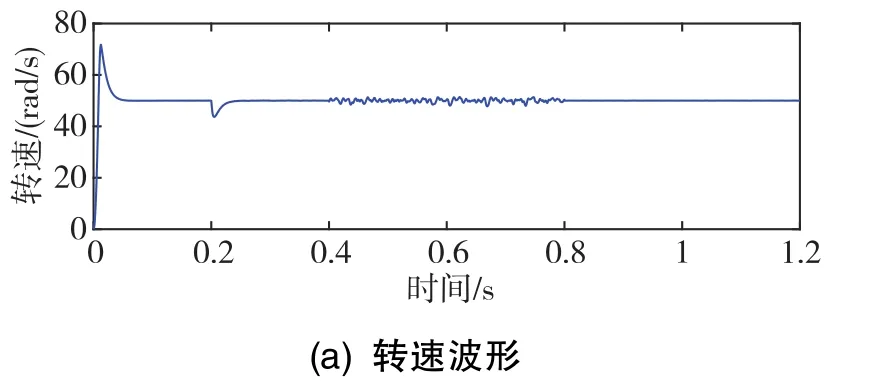
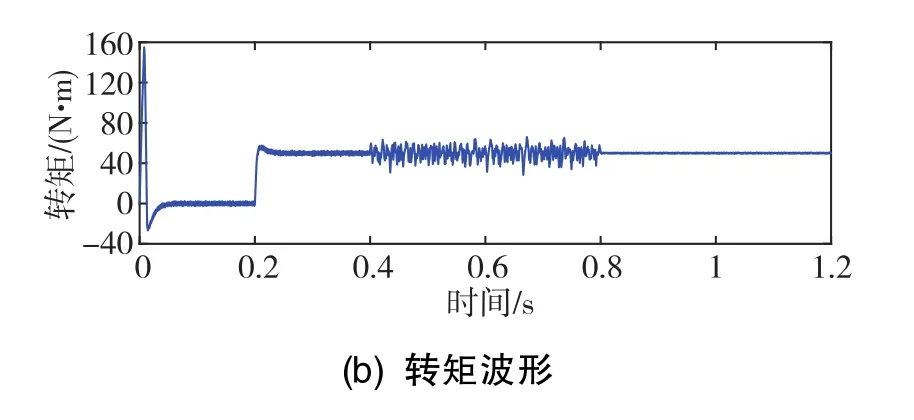
圖6 轉(zhuǎn)速和轉(zhuǎn)矩的波形圖Fig.6 Diagram of speed waveform and torque waveform
從仿真結果可以看出,在0.4s發(fā)生W相開路故障并未施加容錯控制策略時,剩余五相電流均產(chǎn)生了不同程度的畸變和增大,并且電機轉(zhuǎn)速和電磁轉(zhuǎn)矩均出現(xiàn)波動,特別是轉(zhuǎn)矩會出現(xiàn)明顯的兩次諧波分量,轉(zhuǎn)矩脈動很大,這是由于缺相后導致磁場不再對稱,仍然采用正常工況的控制方法無法再實現(xiàn)解耦的d軸、q軸電流控制,因此會有很大的諧波電流產(chǎn)生。而在0.8s施加了容錯控制策略后,定子剩余相電流幅值近似相等,近似為正常運行時電流幅值的1.44倍,與本文采用定子幅值最小的優(yōu)化目標理論分析結果相一致,并且電流諧波分量也被控制的相對較少。同時,轉(zhuǎn)速和電磁轉(zhuǎn)矩在施加容錯控制之后得到明顯改善,也進一步驗證了控制策略的有效性。
接著,為了驗證本文提出的無差拍電流預測控制的有效性,在電機參數(shù)和速度環(huán)參數(shù)均相同的前提下均采用id=0控制策略,使用電流預測控制器代替PI控制器,六相逆變器采用SPWM調(diào)制方式,兩種控制策略的結果對比如圖7~圖9所示。
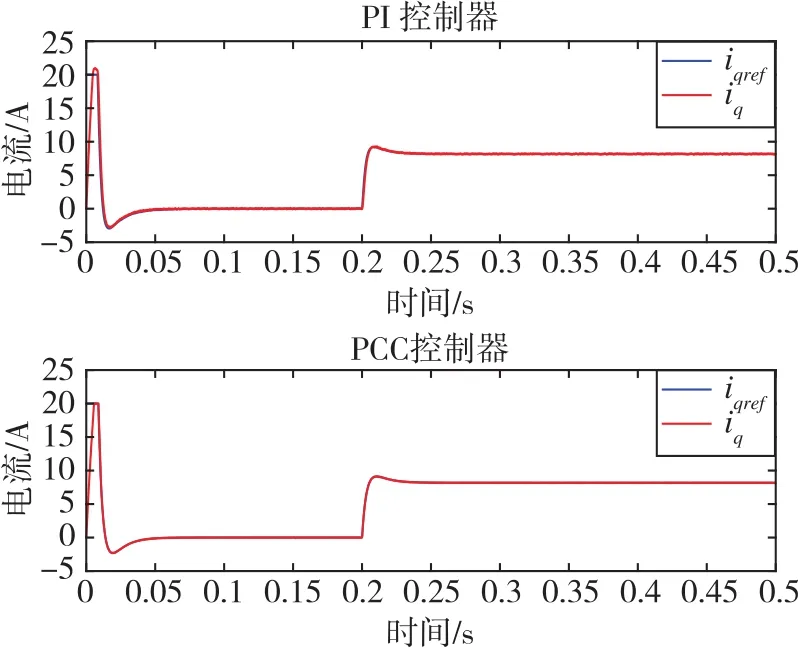
圖7 PI控制下的iq跟隨給定波形圖Fig.7 Waveform of iqfollowing the given value under PI control
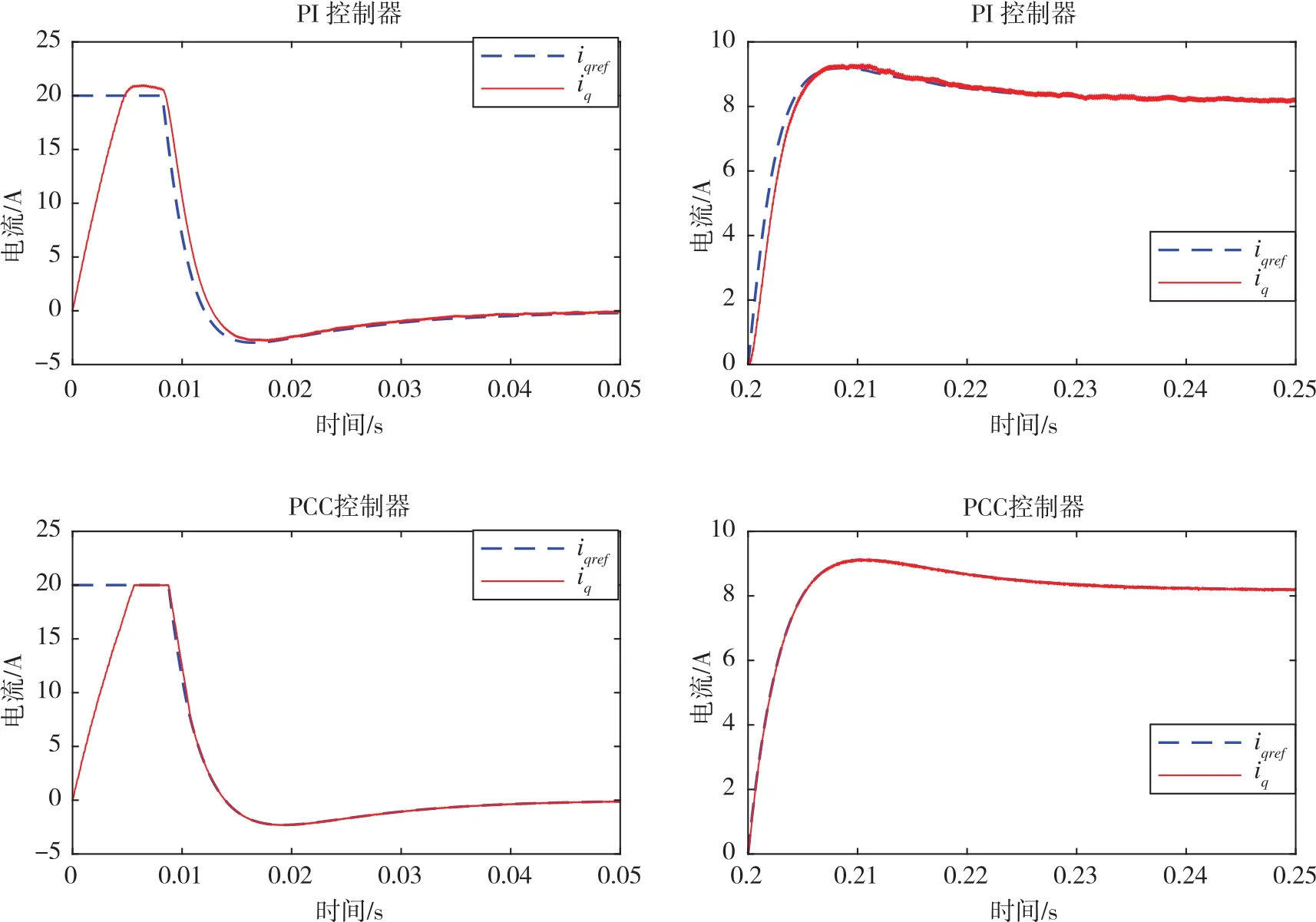
圖8 PI控制下iq的局部放大圖Fig.8 Partial enlarge diagram of iqunder PI control
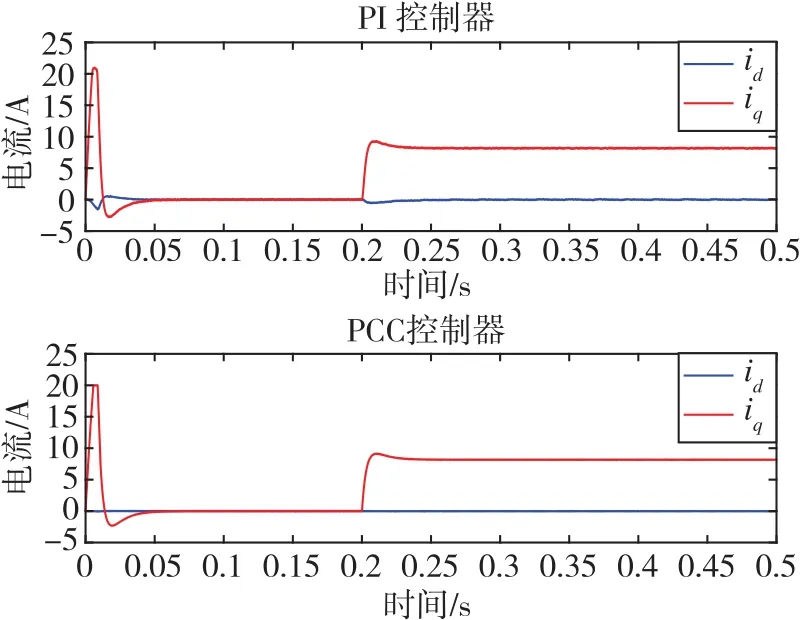
圖9 id、iq波形圖對比Fig.9 Comparison between idwaveform and iqwaveform
由圖7、圖8可知,采用PI控制器時iq總體上來說可以較好地跟隨給定值,但在電機啟動和突加負載轉(zhuǎn)矩時會出現(xiàn)超調(diào)以及動態(tài)響應性能較差的問題。從圖8的局部放大圖對比來看,上面兩張是傳統(tǒng)PI控制的iq波形圖,下面兩張是采用電流預測控制器的iq波形圖,可以看到無論是動態(tài)過程還是穩(wěn)定后,iq都可以始終相對更好地跟隨給定值,并且無超調(diào)產(chǎn)生。因此,采用電流預測控制器后,電流環(huán)的性能得到了改善,驗證了無差拍電流預測控制算法的可行性。
5 結論
本文以中心點相連且不與逆變器端相接、兩套繞組相移30°的六相PMSM為研究對象,當電機發(fā)生一相開路故障時,采用了一種基于矢量解耦的容錯控制策略,為了提高電流環(huán)性能,提出了使用無差拍電流預測控制器來代替?zhèn)鹘y(tǒng)PI控制器,并通過仿真對比分析得到如下結論:
1)通過建立缺相后六相PMSM的數(shù)學模型并引入新的旋轉(zhuǎn)坐標系來實現(xiàn)矢量解耦的容錯控制策略,可以明顯改善缺相后電機的電流畸變和轉(zhuǎn)矩波動,保證電機斷相之后的正常運行。
2)將無差拍電流預測控制算法引入容錯控制之后,相較于傳統(tǒng)PI控制,該算法提升了電流環(huán)跟隨性能和動態(tài)響應性能,克服了傳統(tǒng)PI控制無法兼顧快速響應和穩(wěn)態(tài)性能的缺點,在電機參數(shù)準確的前提下可以達到理論上的最優(yōu)控制效果。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36