AUV移動探測下基于U-Net網絡的本體噪聲去除
2022-01-19 05:17:56李黎明張微之季子良龐國富宋三明
數字海洋與水下攻防 2021年6期
關鍵詞:信號
李黎明,張微之,季子良,景 嚴,龐國富,王 力,宋三明
(1.中國科學院沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016;2.中國科學院機器人與智能制造創新研究院,遼寧 沈陽 110169;3.中國科學院大學,北京 100049;4.沈陽工業大學人工智能學院,遼寧 沈陽 110870;5.沈陽化工大學信息工程學院,遼寧 沈陽 110142)
0 引言
水下機動目標在航行時會向水中輻射噪聲。因此,可以通過水聽器接收到的噪聲信號對航行器的槳葉數、螺旋槳轉速、噸位數以及推進器類型等運動和物理特性等進行監測[1]。通常情況下,采用艦船搭載舷側陣或拖曳陣采集目標噪聲[2-3]。隨著水下無人系統技術的日漸成熟,采用水下機器人如AUV搭載水聽器(陣列)對目標進行探測開始成為可能(圖1)。
但是,基于AUV的移動探測任務至少面臨如下2方面的挑戰:1)由于本體尺寸的原因,AUV搭載的舷側陣尺寸和孔徑要小得多;2)由于能源和動力的限制,拖曳陣的陣元數規模和孔徑不僅相對較小,而且更加靠近本體,導致目標噪聲淹沒在本體噪聲中。因此,AUV移動探測的一個核心任務是如何消除或者降低本體噪聲的影響,提高目標探測和識別的效率。
針對移動平臺的自噪聲去除問題,現有的研究主要基于自適應濾波和帶通濾波的思想展開。文獻[3]、文獻[4]分別提出了基于自適應噪聲消除和自適應波束形成的算法,用于移動AUV拖曳平臺和拖曳船的本體噪聲消除。文獻[5]根據平臺噪聲和目標噪聲之間的頻譜差異進行帶通濾波,去除本體噪聲,提高目標探測能力。文獻[6]針對矢量舷側陣,根據本體噪聲的方向選擇性設置通、阻帶得到空域矩陣,通過空間濾波抑制本體噪聲的干擾。這些研究均將本體噪聲視為噪聲成分,通過抵消或抑制策略消除或減弱其影響。但是,從聲源的角度看,本體噪聲也是一個聲源,因此自噪聲抑制問題也可以視為聲源分離(一般稱為盲源分離)任務。盲源分離算法在水聲信號處理中主要用于多聲源場景下的分離任務。Smaragdis等提出了一種基于短時傅里葉譜的Infomax盲源分離算法,在2個聲源卷積混合條件下實現了聲源分離[7]。Gaeta 等對噪聲信號進行局部白化處理,提出了基于神經網絡的盲源分離算法,實現了淺水信道盲源分離[8]。在考慮多水聲信道多途效應的基礎上,文獻[9]開展了多輸入多輸出通道模型的盲源分離研究,在頻域上采用最小化二階統計量對源信號進行估計。截止目前,水聲信號盲源分離算法多基于模型驅動,根據混合噪聲模型設定合適的分離準則,通過優化求解分離矩陣獲得單一聲源數據。且現有研究多基于陣列信號,基于單水聽器信號的盲源分離較為少見。本文將在單水聽器和聲源分離的框架下開展本體噪聲去除研究。
濾波法需要目標噪聲與干擾聲源和背景噪聲之間具有統計獨立性,當本體噪聲或目標噪聲具有非常相似的倍頻特性且存在部分重疊時,濾波法的性能將急劇下降,為此,本文提出了一種基于U-Net[10]深度網絡的本體噪聲去除算法。首先,對水聽器采集到的噪聲信號或仿真信號作短時傅里葉變換(Short Time Fourier Transform,STFT)提取混合噪聲的時頻特征;其次,利用U-Net網絡對時頻譜的幅度譜(以下簡稱頻譜)進行分割,即從混合譜中提取出目標噪聲的頻譜;最后,結合相位信息,經逆變換(Inverse STFT,ISTFT)獲得分離后純凈的目標噪聲。訓練深度網絡需要大量標定好的數據,但真實噪聲數據往往比較稀缺,因此,為了測試算法的可行性,本文首先采用仿真數據集開展水下噪聲分離研究。后續,將進一步通過湖試和海試數據對網絡進行優化,提高系統的實用性和準確性。
本文的主要貢獻如下:
1)面向移動探測場景,在AUV本體噪聲與水中目標噪聲頻譜特性和倍頻關系極其相似的情形下,提出了一種可行的本體噪聲抑制方案;
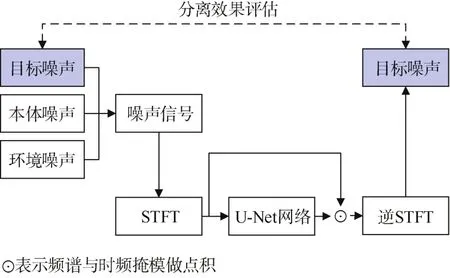
圖2 AUV本體噪聲去除算法流程圖Fig.2 Flow chart of AUV self-radiated noise removal algorithm
2)基于單通道水聽器信號,開展了水下目標噪聲仿真和基于 U-Net深度學習網絡的水下目標噪聲分離研究,實現了目標噪聲與AUV本體噪聲的分離,大幅度提高了目標噪聲的信噪比;
3)通過一系列仿真實驗,測試了算法在不同轉速、槳葉數以及信噪比條件下的性能。
1 算法處理流程
1.1 噪聲信號仿真
為了測試算法的可行性,并獲得深度網絡的初始權值,我們利用現有的艦船噪聲模型生成仿真數據,合成訓練網絡所需要的混合噪聲和目標噪聲。文獻[11]指出,從聲源角度來說,艦船輻射噪聲主要由水動力噪聲、機械噪聲和螺旋槳噪聲3大部分組成,這幾部分決定了組成艦船輻射噪聲頻譜的成分主要有線譜、連續譜和調制譜。這里選用與文獻[12]中相一致的方法生成輻射噪聲仿真數據,其時域信號表述為

式中,gX(t),a(t),gl(t)分別為連續譜分量、調制波形和線譜分量。圖3(a)和圖3(b)分別給出了一段仿真信號的時域波形和頻譜。
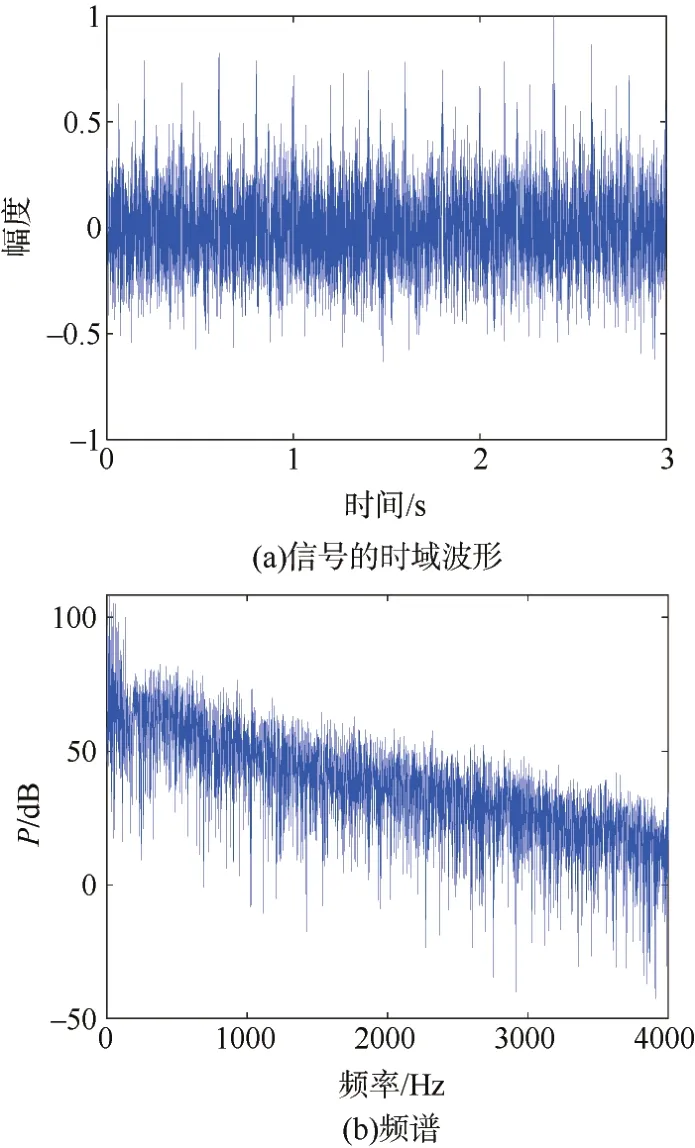
圖3 艦船輻射噪聲仿真Fig.3 An example for the ship-radiated noise simulation
基于上述模型,通過設定船只的槳葉數和轉速,我們可以獲取到不同轉速、不同槳葉數條件下艦船噪聲的時域仿真信號。為模擬混合噪聲,引入線性瞬時混合模型。記目標船只輻射噪聲信號為st(t);母船輻射噪聲信號為ss(t);則混合噪聲的時域表達式記為sm(t)=ss(t)+ηst(t),η表示目標噪聲的相對權值。訓練數據由混合噪聲和與之對應的目標噪聲信號組成,采樣頻率Fs=8 192 Hz,訓練數據包括3 276段混合噪聲和目標噪聲,其中驗證集占20%,單段信號的時長2 s左右。
1.2 時頻特征提取
在水下環境中,當目標距離水聽器較遠時,其傳播過程中的能量衰減會很明顯,這就導致目標噪聲的頻譜在混合噪聲的頻譜中不夠突出,淹沒在了背景噪聲之中。通過時頻變換,可以通過統計的方式對特征頻譜進行增強。短時傅里葉譜是最原始的頻譜特征。出于簡化特征提取和測試網絡可行性的考慮,本文直接通過STFT變換提取短時傅里葉譜。式(2)給出了STFT的定義:

式中:s(t)為源信號;w(t)為窗函數。變換窗長取8 192,步長為64,單段信號頻譜幀數取 128,最終頻譜大小取為4 096× 128。
1.3 U-Net網絡
本文將U-Net網絡用于本體噪聲去除任務,圖4給出了網絡的詳細結構。降采樣部分采用卷積層和池化層來減小輸入圖像的尺寸并增加特征通道數,從而方便捕獲全局信息;升采樣部分采用轉置卷積來增加圖像尺寸并減少特征通道數,用于精確定位。
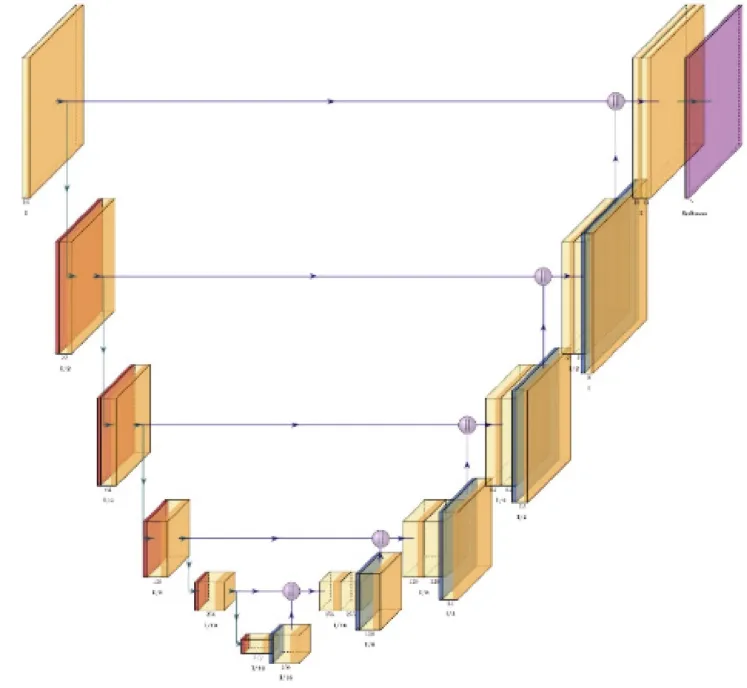
圖4 U-Net網絡結構圖Fig.4 Network structure of U-Net
U-Net網絡配置如下:降采樣部分的二維卷積每層卷積核大小為3× 3、步長為2,激活函數采用ReLU,引入批歸一化策略加速網絡的收斂;升采樣的每層使用與降采樣層對稱的卷積核大小和卷積步長從而保證輸入輸出維度一致,其中卷積層采用的是反卷積,或稱轉置卷積。我們舍棄了文獻[10]中的 Dropout層,因為批歸一化的引入可以在一定程度上抑制過擬合的出現,不需要額外引入 Dropout。網絡經最后的 Sigmoid層輸出時頻掩模。
網絡訓練的目標是獲取準確的時頻掩模。任意給定混合噪聲的頻譜,經過“編碼–解碼”之后輸出掩模矩陣的維度與輸入一致,將時頻掩模與混合噪聲頻譜做點積便可獲得去除本體噪聲后的頻譜。記輸入混合信號的頻譜為M,期望輸出目標噪聲的頻譜為T。訓練過程的優化器選用Adam,損失函數為輸出頻譜與期望頻譜差值的L1,1范數:

式中:f(M,Θ)為輸入頻譜;權重參數為Θ時對應輸出的掩模;⊙表示按位相乘。
2 評價指標
混合信號經短時傅里葉變換后獲得的頻譜作為輸入特征,網絡對輸入頻譜進行編解碼后獲得時頻掩模矩陣,其與輸入混合頻譜做點積之后即可獲得期望的目標噪聲頻譜,再經ISTFT即可獲取到時域目標信號。
為了對本體噪聲去除效果進行評估,我們引入盲分離中常用定量評價指標SDR[13],用以評估分離結果的優劣[14]。記se為經算法處理過后輸出的噪聲信號,其可以看作目標信號與多種干擾信號之間的混合,即

式中:starget表示目標噪聲;einterf,enoise,eartif分別為干擾、噪聲和偽影誤差。SDR定義為

分離前后目標噪聲SDR的差值可以反映本體噪聲的去除效果,該指標記為

式中:sr為目標噪聲的參考值;sm為混合噪聲。這里SDR的具體計算基于mir_eval工具箱[16]。進一步,為了衡量整體的分離效果,定義 GNSDR(Global NSDR):
3 實驗
為了測試上述算法在本體噪聲去除中的可行性和有效性,我們開展了以下3個實驗:
1)母船與被探測船只槳葉數相同、轉速不同情形下的本體噪聲去除實驗。該實驗考察網絡分離2個不同轉速目標的能力。在槳葉數相同的情況下,兩船轉速越接近,其頻譜的重合度越高,因此分離難度會隨轉速差的大小發生變化。
2)母船及被探測船只轉速均固定、槳葉數不相同情況下的本體噪聲去除實驗。該實驗考察網絡分離2個不同槳葉數目標的能力。轉速固定時,隨槳葉數的變化目標的頻譜特征也會發生變化,且槳葉數差異越大,其頻譜特征變換也越大。
3)固定頻率、固定槳葉數,目標噪聲信噪比不同情形下的本體噪聲去除實驗。該實驗考察網絡分離2個噪聲強度不同的目標的能力。當目標與母船相距較遠時,目標噪聲在傳播過程中會有一定程度的能量損失,合成混合信號時可通過調整η值改變混合噪聲中目標噪聲的信噪比。
3.1 不同轉速差下分離效果評估
圖5給出了一個混合頻譜分割結果的例子。由于高頻部分包含的頻譜信息較少,這里只展示了512 Hz以下的頻譜。圖5(a)為混合噪聲的頻譜,混合噪聲由槳葉數均為Nblades=3的2段噪聲信號疊加而成,其中母船的轉速為RS=4r/s,目標轉速為RT=13r/s,目標噪聲信噪比0。圖5(b)為本文算法取得的結果,圖5(c)為參考目標噪聲的頻譜。分析圖5不難看出來,在槳葉數相同、轉速差為dR=9r/s的情況下,本體噪聲的頻譜成分得到了有效去除。
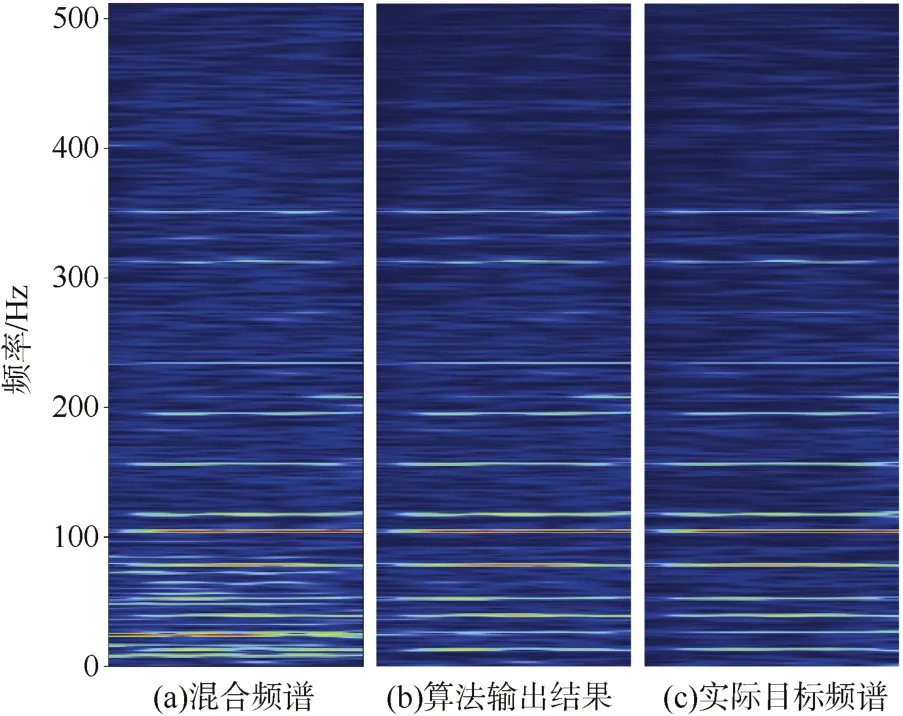
圖5 算法效果示例Fig.5 An example for target noise separation
頻譜基頻對應目標螺旋槳的轉速。從圖5可以看出,分離混合噪聲頻譜時,由于目標和本體2大主要聲源均為艦船輻射噪聲,均具有倍頻特性且存在部分重疊。因此,本體噪聲去除的質量與兩船的轉速差直接相關。圖6給出了不同轉速差下本文提出的算法在本體噪聲去除上的性能,此時兩船槳葉數為NS=NT=3葉,給定母船轉速RS=4r/s,目標轉速從RT={12,13,14,15,16}r/s各值中選取從而設定不同轉速差,信噪比設為0。給定轉速差下各生成20組測試數據,驗證算法性能。
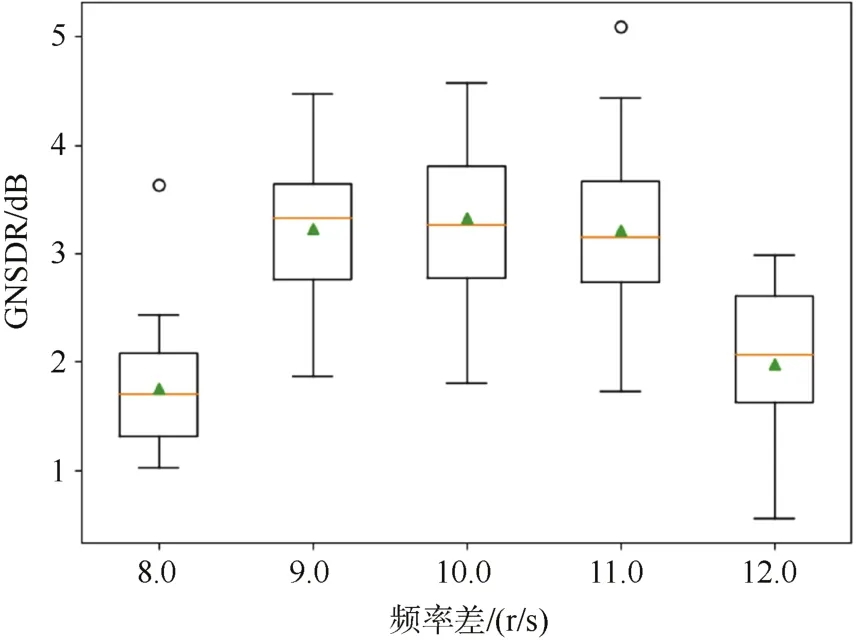
圖6 不同轉速差情況下本體噪聲去除性能Fig.6 Performance of self-noise removal under different rotational speed difference
從圖6可看出,在轉速差從dR=8r/s增加到dR=10r/s過程中,GNSDR指標明顯提升,即轉速差越大,分離效果越好。在轉速差繼續增大至dR=12r/s過程中,分離指標值逐漸下降,這是因為此時目標噪聲基頻愈發靠近本體噪聲的倍頻,導致二者頻譜產生重疊,給分離帶來了一定挑戰。
3.2 不同槳葉數差下分離效果評估
不同槳葉數對應不同的葉頻特征,兩船轉速固定時,槳葉數對頻譜的影響主要體現在葉頻上。圖7給出了不同槳葉數差下本文算法去除本體噪聲的性能,實驗在兩船轉速固定條件下展開。本體和目標轉速分別對應為RS=8r/s和RT=11r/s,母船槳葉數NS=3葉,目標槳葉數在NT={4,5,6,7}各值中選取從而設定不同槳葉數差,信噪比設為0。給定槳葉數差條件下,分別生成20個片段的測試數據。圖7的結果表明,隨著槳葉數差的增加,本體噪聲的分離效果不斷改善。這是因為隨著槳葉數差的增加,兩噪聲成分的葉頻特征的區分愈發明顯。
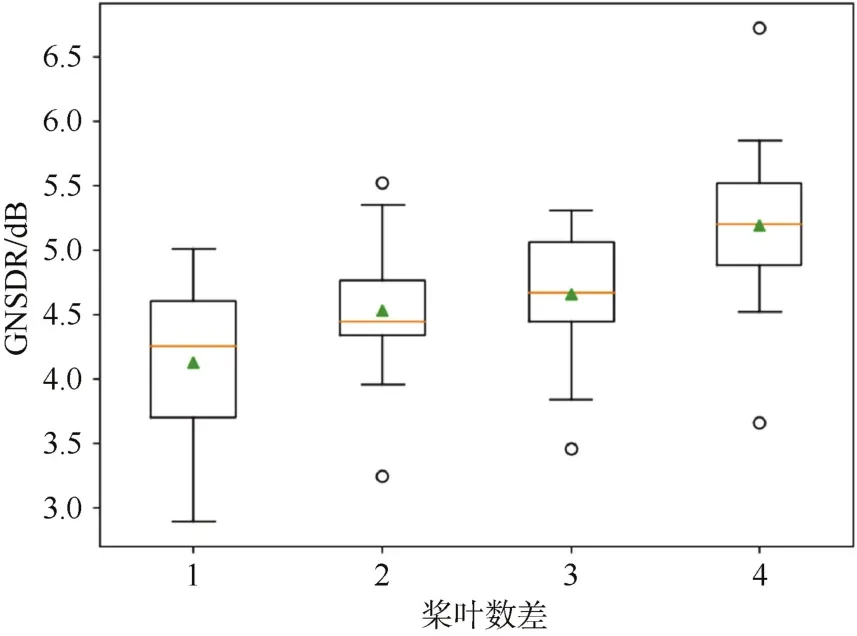
圖7 不同槳葉數差條件下本體噪聲去除性能Fig.7 Performance of self-noise removal under different blade number difference
3.3 不同信噪比條件下分離效果評估
在給定探測場景下,當目標和本體船只槳葉數和轉速確定后,影響分離效果的另一主要因素當屬目標信號的信噪比。當混合譜中二者強度相差不大時,聲源分離更容易開展,而實際場景中目標信號強度一般較低。因此,對二者進行混合時,可以設定不同的信噪比,驗證低信噪比條件下算法去除本體噪聲的性能。圖 8給出了目標信號不同信噪比條件下算法去除本體噪聲的性能。圖9給出了信噪比為–10 dB時分離效果的一個實例,圖9(a)表示的混合譜中目標信號幾乎被完全淹沒,圖9(b)為本文算法輸出的目標噪聲的頻譜,其與圖9(c)表示的目標噪聲真實頻譜在特征譜線處基本一致。
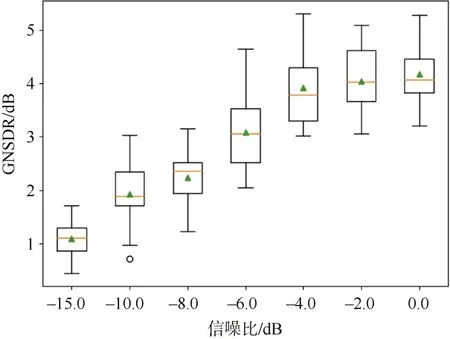
圖8 不同信噪比條件下分割效果的對比圖Fig.8 Performance of self-noise removal under different signal-to-noise ratio
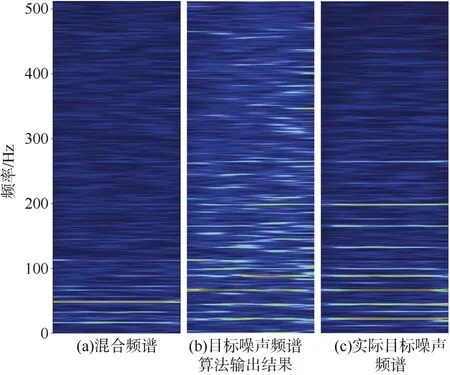
圖9 目標信號信噪比為-10 dB條件下本體噪聲去除效果示例Fig.9 An example of target noise separation when the SNR of target noise is -10dB
實驗結果表明,在目標信號信噪比不低于–10 dB的條件下,應用本文算法可以取得良好的本體噪聲去除效果。需要指出的是,網絡訓練階段所用數據中目標信號信噪比均為0(η=1),這也表明本文算法在低信噪比條件下具有一定的魯棒性。
4 結束語
本文面向水下移動探測場景,開展了AUV本體噪聲去除算法研究。提取噪聲信號的時頻譜,輸入U-Net深度學習網絡,實現了單水聽器噪聲信號下的盲源分離,初步達到了去除本體噪聲的目標。不同實驗條件下的仿真結果表明,在母船與目標船只特征存在細微差異的情形下,本文的算法可以很好地對本體噪聲進行去除,且該算法在低信噪比條件下表現良好。
盡管實驗結果初步驗證了算法的可行性,但是無論是特征提取、網絡結構還是數據集都還需要開展進一步的研究。后續,將主要在以下3個方面開展工作:
1)盡管 GNSDR指標可以在一定程度上對盲源分離效果做定量說明,但是實際應用中我們無法獲取目標的真實噪聲數據,無法使用該指標對結果進行評估。因此,在后續工作中我們考慮將采集到的混合噪聲在去除背景噪聲前后分別輸入到識別模塊中,通過對比識別精度進一步驗證本體噪聲去除效果。
2)基頻信息是表征目標特性的重要參數,其對聲源分離有著一定指導作用。后續工作中將引入多任務學習策略,實現聲源分離與基頻檢測的同步完成。
3)多目標情形是AUV移動探測中不可避免的場景,該條件下的盲源分離算法也是之后研究的重點。后續考慮使用聚類或及獨立成分分析的方法處理多目標場景下的盲源分離任務。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06