PHEV模式切換中離合器協調控制策略改進設計
2022-02-24 04:02:28孟宇飛高愛云劉少華
河南科技大學學報(自然科學版) 2022年3期
孟宇飛,高愛云,劉少華
(河南科技大學 車輛與交通工程學院,河南 洛陽 471003)
0 引言
并聯式混合動力汽車(parallel hybrid electric vehicle,PHEV)模式切換過程的控制對象主要是發動機、離合器和電機[1-4]。文獻[5]基于汽車部件和復雜工況,提出了一種“發動機動態響應性能識別+發動機動態響應轉矩預估+電動機同步補償”的協調控制方法,減少了模式切換過程中動力源需求轉矩與總輸出轉矩的差值。文獻[6]提出了一種基于干擾補償的切換快速終端滑模控制方法,并根據模式切換過程中不同動作階段內干擾量的不同,分別設計了各階段的動態協調控制器,以減小整個切換過程中的扭矩波動,提高車輛駕駛平順性。文獻[7]基于模型預測控制方法,設計了兼顧發動機啟動速度與平順的轉矩協調控制策略,在保證發動機能快速啟動的前提下,實現動力源間的轉速轉矩協調,從而實現不同模式間的平順切換。文獻[8]從抗干擾協調控制器設計的角度出發,提出了干擾補償的協調控制策略,降低了干擾帶來的沖擊影響。文獻[9]基于混合動力系統理論,建立了一種PHEV功率控制系統的混合輸入輸出自動化模型,并通過基于規則的控制策略,在保證排放和經濟性的前提下,實現了由純電動模式到混合驅動模式的平穩切換。文獻[10]提出了以減小車輛沖擊度和離合器滑摩功為目標的基于模型預測控制的轉矩協調控制策略,實現了離合器接合過程中沖擊和滑摩損失的兼顧。以上研究雖然能保證一般情況下模式切換的平順性,但都沒有考慮到離合器磨損情況對控制策略的影響,而離合器摩擦片磨損后,其動態特性會發生變化[11],即離合器不能再按照控制策略的要求傳遞轉矩,會造成原有控制策略控制效果變差,甚至無法完成模式切換。因此,模式切換的控制策略中應當考慮離合器的磨損情況,以提高控制策略的適應能力。
本文以單軸PHEV為研究對象,提出了一種基于卡爾曼濾波的PHEV模式切換過程中離合器磨損自適應協調控制策略。對以往的模式切換過程中離合器協調控制策略進行了改進設計,考慮到離合器磨損量無法直接得出,利用 PHEV發動機起動過程中離合器傳遞轉矩等于發動機起動阻力這一現象,對離合器的磨損量進行估計;另外,為了提高對離合器磨損量的估計精度,建立了發動機起動阻力模型;最后,根據離合器磨損量的估計值對離合器結合壓力進行補償,以消除離合器磨損對模式切換控制策略的影響。
1 PHEV動力系統結構以及模式切換過程分析
1.1 PHEV動力系統結構
PHEV動力系統結構簡圖如圖1所示。
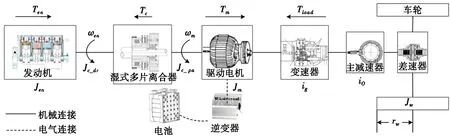
圖1 PHEV動力系統結構簡圖
圖1中,發動機和電機通過濕式多片離合器耦合,動力源發出的轉矩通過變速器-主減速器-差速器傳遞到車輪。Ten為發動機轉矩,Tc為濕式多片離合器傳遞的轉矩,Tm為電機發出的轉矩,Tload為汽車的負載阻力矩,Jen為發動機的轉動慣量,Jm為驅動電機轉動慣量,ωen為發動機轉速,ωm為電機轉速,Jc_dr為濕式離合器發動機端轉動慣量,Jc_pa為濕式離合器驅動電機端的轉動慣量,ig為變速器速比,i0為主減速器速比,Iw為車輪總轉動慣量,rw為車輪半徑。
由于動力源的總需求轉矩在數值上和Tload相等,因此只需要計算出Tload,即可得出動力源的總需求轉矩,Tload的計算如下[12]:
(1)
其中:m為整車質量,kg;f為輪胎滾動阻力因數;Cd為空氣阻力因數;A為迎風面積,m2;ua為車速,m/s;a為汽車縱向加速度,m/s2;γ為道路坡度。
為滿足整車動力性、經濟性的要求,混合動力系統工作模式會隨整車需求轉矩的變化而改變,存在不同工作模式之間的切換。而由于發動機與電機的動態特性不同,如果對模式切換的過程不加以控制,則會引起輸出轉矩產生較大波動。在所有的模式切換過程中,由于由純電動切換到發動機驅動這一模式切換過程,其發動機、電機、離合器的動作更為復雜[13],因此,本文主要針對由純電動切換到發動機驅動這一模式切換過程進行研究。
1.2 純電動切換到發動機驅動過程分析
模式切換的品質通常用沖擊度J=da/dt來評價,德國的沖擊度推薦值為|J|≤10 m/s3,中國的推薦值為|J|≤17.64 m/s3[14],本文的控制策略主要是通過控制濕式離合器的結合與分離來提高模式切換品質,其濕式離合器的動作、各動作的結合壓力變化以及目的如表1所示。

表1 模式切換過程中濕式離合器的動作
表1所示的幾個階段電機與發動機各自需要發出的轉矩如下:
消除空行程階段:
(2)
發動機起動階段:
(3)
轉速同步階段:
(4)
完全結合階段:由于ωen=ωm=ωc_dr=ωc_pa,此時
(5)
對濕式多片離合器的控制主要是對離合器結合壓力的控制。大多采用模糊控制對離合器的初始結合壓力以及結合壓力變化率分別控制[15-16],其結構如圖2所示。
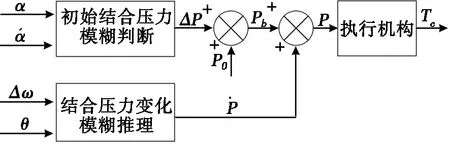
圖2 未考慮磨損情況的離合器結合壓力模糊控制

圖2所示的控制方案雖能很好地控制離合器結合壓力,使模式切換過程中的整車沖擊度在推薦標準內,但由于缺乏對濕式多片離合器摩擦片磨損情況的適應性,隨著離合器摩擦片的磨損,其控制效果會逐漸變差。
2 離合器自適應協調控制策略設計
2.1 自適應模糊控制器設計原理
針對1.2小節中的模式切換控制策略不能適應離合器摩擦片磨損情況的問題,本文提出一種基于卡爾曼濾波的離合器模糊控制改進方法,其設計原理如圖3所示。
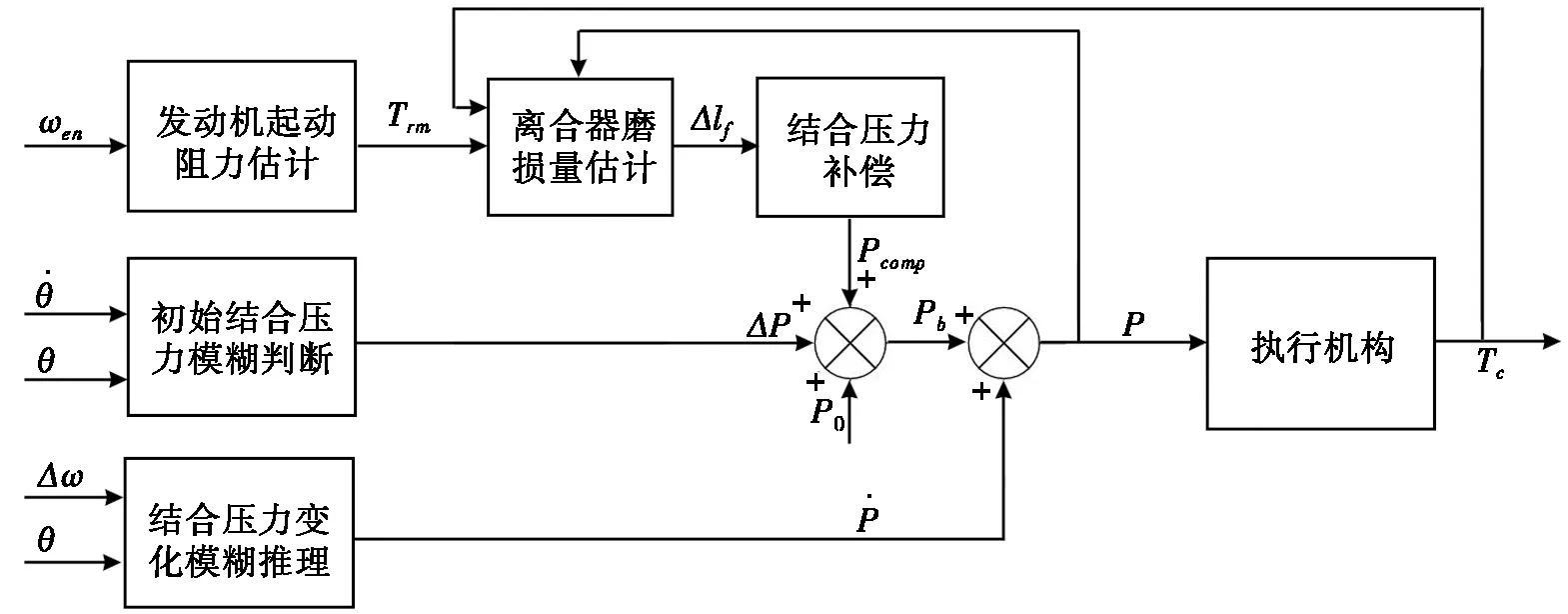
圖3 離合器磨損自適應結合壓力模糊控制
在發動機起動過程中,發動機起動阻力估計模塊利用建立的起動阻力模型,以發動機起動時轉速ωen為輸入,估計發動機實時起動阻力Trm。離合器磨損量估計模塊利用Trm、P和Tc之間的關系估計出離合器的磨損量Δlf。然后,結合壓力補償模塊,根據當前離合器的磨損情況以及離合器動態特性給予相應的結合壓力補償Pcomp。
2.2 濕式多片離合器磨損量估計
離合器在結合與分離過程中所傳遞的轉矩與結合壓力的關系為[17]:
(6)
其中:μ為摩擦片與鋼片之間的摩擦因數;Dclc為離合器活塞外徑,mm;dclc為離合器活塞內徑,mm;Z為摩擦副個數;Rclc為離合器摩擦片外徑,mm;rclc為摩擦片內徑,mm;k為回位彈簧的彈性系數;l0為離合器的空行程,mm。
根據式(6)中離合器傳遞轉矩與控制壓力的關系,可以計算出當前狀態下離合器磨損量的測量值zk:
(7)
由于離合器磨損量無法直接獲取,而通過式(7)簡單計算得到的zk值,由于各種因素的影響,其精度不高,因此需要對其改進。由于卡爾曼濾波具有不斷變化的系統、內存占用較小(只需保留前一個狀態)和速度快的特點,十分適合用于估計離合器的磨損狀態。假設在電機起動發動機過程中發動機達到ωkal時,離合器控制壓力為Pkal,此時發動機起動阻力為Tkal,則當前狀態下離合器磨損量的測量值zk為:
即
Zk=HXk+vk,
(8)
由于單次離合器結合帶來的離合器磨損量可以忽略不計,因此可以認為
xk=xk-1+ωk-1,
(9)
即
Xk=AXk-1+wk-1,
(10)
式(8)和式(10)中:vk,wk分別為誤差,均服從正態分布,p(v)~(0,R) ,p(w)~(0,Q)。A為單位矩陣。
由于vk,wk均為不可測量,因此式(8)可以寫為
Zk=HXk,
(11)
式(10)可以寫為
(12)
(13)
令G=KkH,則
(14)
由于p(Xk)~(0,w),p(Zk)~(0,v),因此p(ek)~(0,p)。

(15)
其中:
(16)
由式(11)可得:
(17)
將式(17)代入式(15)可得:
(18)

(19)

(20)

(21)

(22)
(23)
對式(23)求導可得
(24)

(25)
由式(12)、式(21)、式(24)和式(14)可估計出當前采樣時刻的Xk,即當前采樣時刻濕式離合器的磨損量Δlfk。得到當前時刻的Xk后,由式(22)可得當前時刻的誤差協方差Pk,為下一次濾波做準備。通過多次濾波,Δlfk將逐漸逼近濕式離合器的真實磨損量Δlf。由于獲取zk要獲得當前濕式離合器傳遞的轉矩與控制壓力,而濕式離合器傳遞的轉矩雖然不直接可測,但在發動機起動過程中其數值等于發動機的起動阻力。
3 獲取發動機起動阻力
發動機起動阻力主要分為曲柄連桿機構等的往復慣性力矩、氣缸的泵氣阻力矩和發動機內部的摩擦力矩。根據文獻[18-20]的研究,結合本文研究對象的發動機結構參數,得出發動機曲軸上的起動阻力與起動轉速、曲軸轉角之間的關系如圖4所示。
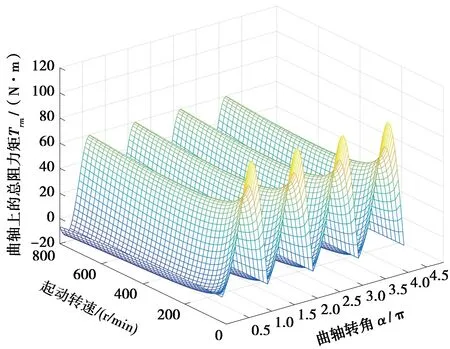
圖4 發動機曲軸上總的阻力矩
由圖4可知:當轉速一定時,發動機曲軸上的阻力矩伴隨曲軸角度變化呈周期性變化。因此取固定轉速下單個周期Trm的平均值作為該轉速下發動機曲軸上的起動阻力矩Trm_a,如圖5所示。

圖5 發動機曲軸上的起動阻力矩
4 仿真計算
4.1 離合器磨損量估計卡爾曼濾波效果
由于濕式離合器磨損是一個相當緩慢的過程,達到過度磨損以至于影響到模式切換控制效果的程度需要的結合次數過多,為了便于觀察離合器過度磨損后對模式切換控制效果的影響,本文將離合器磨損量設置為4 mm。為了減少運算量,本文采樣設置為發動機起動轉速每隔50 r/min進行一次采樣,離合器磨損量卡爾曼濾波效果如圖6所示。
從圖6中可以看出:由卡爾曼濾波器得到的Δlfk隨著采樣次數的增加,其數值逐漸逼近離合器磨損量的真實值,雖然Δlfk最終結果(4.1 mm)相較于真實值(4.0 mm)有一定誤差,但誤差僅為2.5%,濾波效果良好。

圖6 離合器磨損量卡爾曼濾波效果
4.2 模式切換過程仿真分析
將未考慮離合器磨損情況的離合器結合壓力模糊控制策略記為控制策略1,本文的控制策略記為控制策略2。在離合器磨損前控制策略1的控制效果如圖7所示。結合圖7a和圖7b可以看出:16.4 s車輛發出模式切換信號后,離合器初始結合壓力模糊控制器控制離合器油壓P迅速上升接近Pc_a,此時離合器逐漸開始傳遞轉矩,然后離合器結合壓力P逐漸上升以帶動發動機轉速上升,電機與發動機的轉速差于16.4 s時,開始減小。發動機點火后P逐漸下降至滑磨壓力點Pc_a,此時發動機不輸出轉矩,離合器并未分離而是仍傳遞一定轉矩,由于電機仍可帶動發動機提速,兩者的轉速差得以繼續減小,并于17.8 s完成轉速同步,轉速同步后P迅速上升直至離合器完全結合。與此同時,如圖7c所示,在轉速同步后發動機轉矩緩慢上升,電機轉矩緩慢下降,于18.6 s完成轉矩切換,模式切換完成。整個模式切換過程的沖擊度如圖7d所示,最大值為4.5 m/s3,小于德國的沖擊度推薦值。
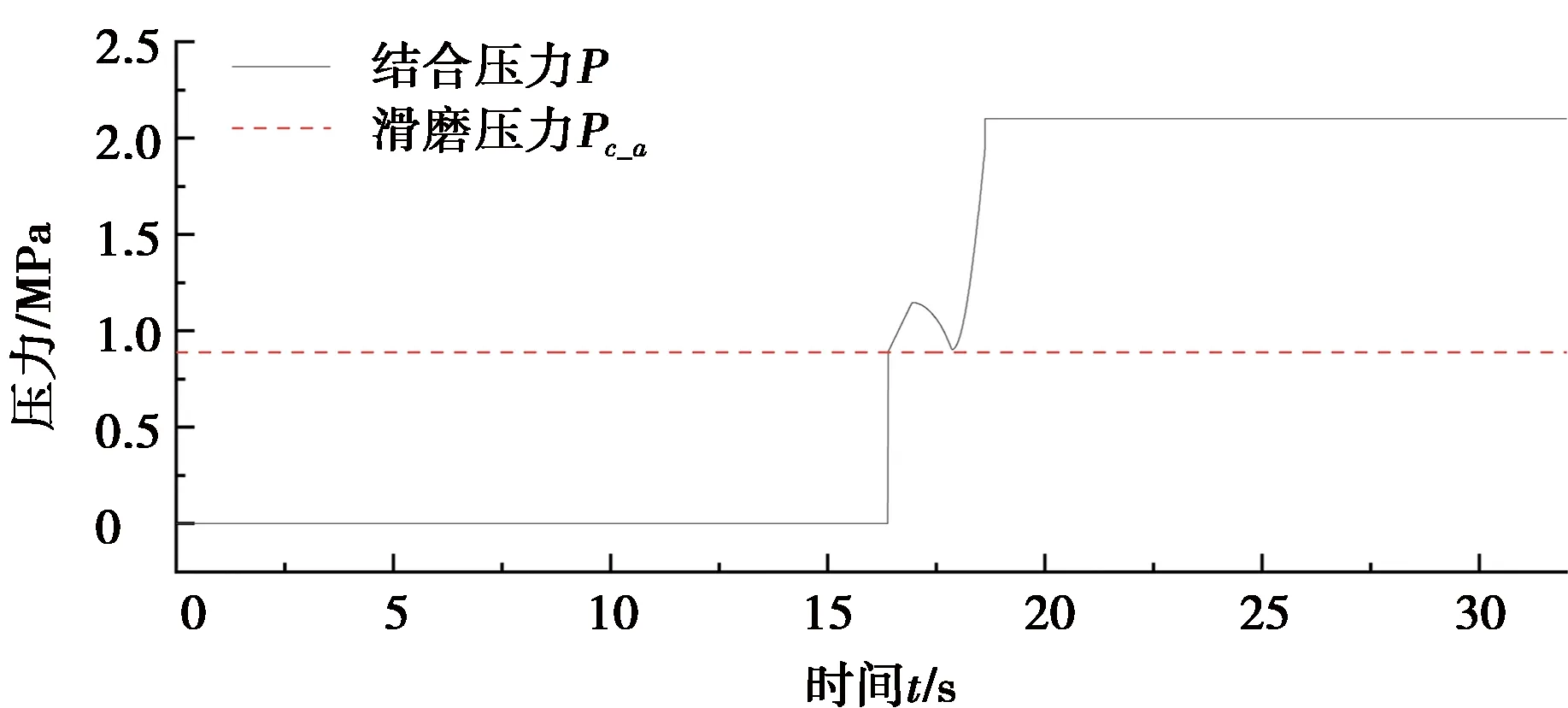
(a) 結合壓力和滑磨壓力
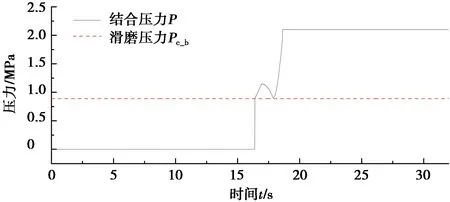
控制策略1在離合器磨損后控制效果如圖8所示。由圖8a和圖8b可以看出:由于離合器磨損后其滑磨壓力點由Pc_a上升到Pc_b,而離合器結合壓力控制器仍控制離合器初始結合壓力為Pc_a,導致離合器不能馬上開始傳遞轉矩,而是等結合壓力上升至接近Pc_b才開始傳遞轉矩,電機與發動機轉速差于18.2 s才開始減小,相較于離合器磨損前延遲了1.8 s。另外,由于P在發動機起動后需退回至Pc_a,而又由于離合器的磨損,P退回至Pc_b時,離合器轉矩傳遞已接近中斷,致使發動機與電機在轉速即將同步時轉速差又逐漸變大,而未能完成轉速同步,模式切換無法繼續進行。
由于控制策略2在離合器未磨損時,其Δlf與結合壓力補償Pcomp均為0,因此仿真結果與控制策略1的仿真結果相同,不再贅述。對離合器磨損量Δlf進行估計,根據Δlf對P進行補償后的仿真結果如圖9所示。結合圖9a和圖9b可以看出:P在模式切換指令發出后迅速上升至接近Pc_b,電機與發動機的轉速于16.41 s開始減小,相較于磨損前幾乎沒有遲滯。而Pa在發動機起動后退回至接近Pc_b,離合器傳遞轉矩沒有中斷,電機可以繼續帶動發動機提速,模式切換過程得以繼續進行并于17.85 s完成轉速同步,之后轉矩切換過程于18.61 s結束,模式切換完成。整個模式切換過程的沖擊度如圖9d所示,由于卡爾曼濾波器的估計值與實際值存在誤差,導致模式切換過程出現了較大沖擊,達到8.5 m/s3,雖然沖擊度較大,但仍然在德國的沖擊度推薦值之內。
(a) 壓力
5 結論
(1)對離合器協調控制策略進行了改進,通過添加結合壓力補償模塊,使其具備了對離合器磨損情況的適應能力。
(2)本文基于卡爾曼濾波原理,根據PHEV發動機起動過程中離合器傳遞轉矩等于發動機起動阻力這一現象,對濕式離合器的磨損量進行了估計,提高了磨損量的估計精度。
(3)在離合器磨損量達到4 mm時,改進前的控制策略未能完成模式切換,本文改進的模式切換控制策略仍能完成模式切換,雖然最大沖擊度從4.5 m/s3增大到8.5 m/s3,但仍然在德國的沖擊度推薦值以內,可以認為,本文改進的控制策略在離合器過度磨損時仍能保證良好的控制效果。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15