智能交通短時預測方法綜述
2022-02-28 22:39:21任正平黃文博
交通科技與管理 2022年3期
任正平 黃文博
摘要 智能交通系統作為工業物聯網最重要的應用之一,旨在提高交通網絡的效率和安全性。文章回顧了當前面向智能交通的研究工作,分析了當前研究的重點方向和挑戰,對當前的交通預測方法進行分類,給出兩種不同類型的預測模型的預測結果,最后提出了智能交通預測領域中潛在的研究方向。
關鍵詞 智能交通;系統框架;預測方法
中圖分類號 U491.112 文獻標識碼 A 文章編號 2096-8949(2022)03-0001-030 引言
由于我國交通設施和交通環境的具體國情和世界上多數發達國家存在差異,國外在智能交通管理系統(ITS)方面的研究偏重于高速公路路網,而在大規模城市地面路網方面的研究成果較少,缺少相應的能夠參考和借鑒的成果。因此,需要研究適合我國大型城市路網的ITS。
ITS的核心技術是短時交通預測算法。交通系統是復雜的時變系統,具有高度的不確定性和非線性特征,交通數據也有著周期性、突發性等特點。短時交通預測是根據當前或歷史信息預測幾分鐘或幾小時后的情況[1],相較于中長期預測,短期預測的影響因素更多,更加難以預測。可以將周期性變化看作中長期預測需要做的預測,而短期預測則是要考慮到突發狀況,而突發性狀況需要根據近期交通數據進行預測。由于ITS用于實時管理交通狀況,因此短時交通預測算法應具有以下特點:
(1)實時性。由于是短時預測,因此算法需要有快速計算能力。
(2)準確性。ITS一般用于動態路徑誘導,不準確的預測會使使用者喪失信息,預測也失去了意義。
(3)可靠性。交通狀況受到的影響因素很多,比如事故、臨時交通管制等等,而交通數據本身由于采集技術的原因也可能不完整或不準確,因此,短時預測算法需要有很強的抗干擾能力。
針對當前短時交通預測中存在的問題,從影響交通數據切入,分析影響交通狀態的因素,梳理并分析當前常用的預測算法的性能、特點及存在的問題,結合交通數據的三個特點,給出最合適的交通預測方法和研究方法架構。
1 系統框架
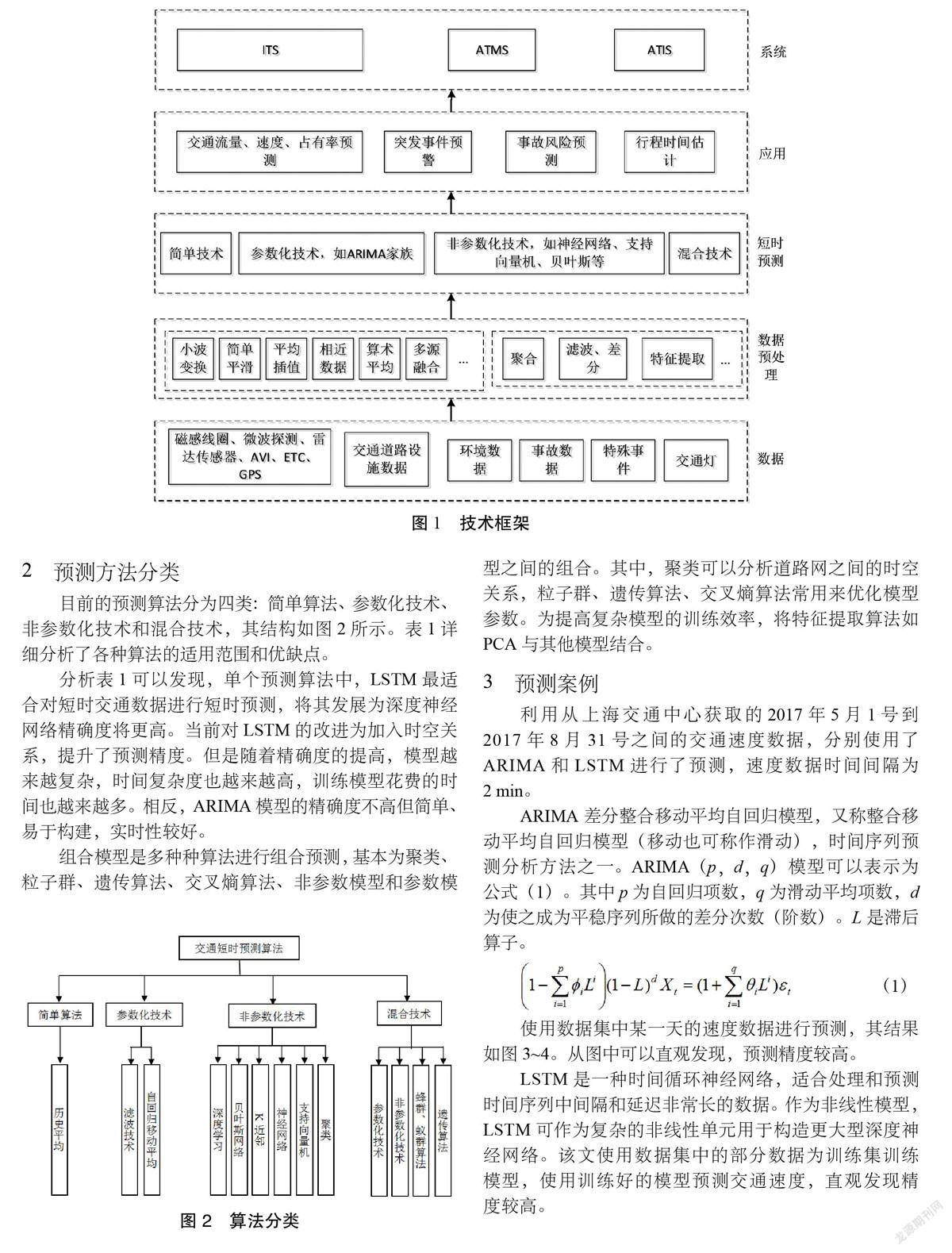
研究地面主干路網交通短時預測與報警的系統化方法,包括數據與處理、數據預測、應用等流程,為后續研究形成一套可應用的方法架構。其架構如圖1所示。
整個地面主干路網交通短時預測與報警研究主要分為五個階段:
(1)數據獲取階段。根據從當前研究現狀中了解到的交通短時預測的影響因素,首先獲取相關數據。數據主要包括磁感線圈、GPS等探測數據,也是進行預測的主數據,包括速度、流量等。
(2)數據預處理。數據的質量直接影響預測算法的精確度,但直接采集到的數據質量較差,存在噪聲、數據缺失等情況,需要對采集到的數據進行濾噪、數據補全等處理,將數據處理成可以使用的高質量數據。常用的提高數據質量的方法有小波變化、使用相近數據補全、多源數據融合等。不同的算法也需要不同的數據形式,聚合是對速度、占有率和交通流等采集數據的處理,濾波和差分是將交通數據轉換為平穩數據的技術,特征提取是某些算法為提高效率對交通數據進行降維處理。
(3)使用短時預測算法預測交通狀態。短時預測算法是地面主干道路網短時預測與報警技術的核心。目前使用的算法主要包括四類:簡單算法(又叫簡單技術)、參數化技術、非參數化技術和混合技術。每種技術都有其優缺點,目前最常用的是ARIMA系列和LSTM相關的混合技術。每種算法都有其優缺點,針對不同的數據和目的可選用不同的算法。該文對這些算法的特點進行研究,結合大城市地面交通的特點進行相應的改進,最終得到更加適用的算法。
(4)功能。基于這些預測算法可以產生許多應用,如交通流量、速度和占有率預測、突發事件預警、事故風險預測、行程時間估計等。這些功能是ITS等系統的核心。
(5)系統。通過對這些功能的集成可以實現如ITS、ATIS等系統,應用到現實中。最終達到協助交通管理部門進行決策,高效有序地管理交通的目的。
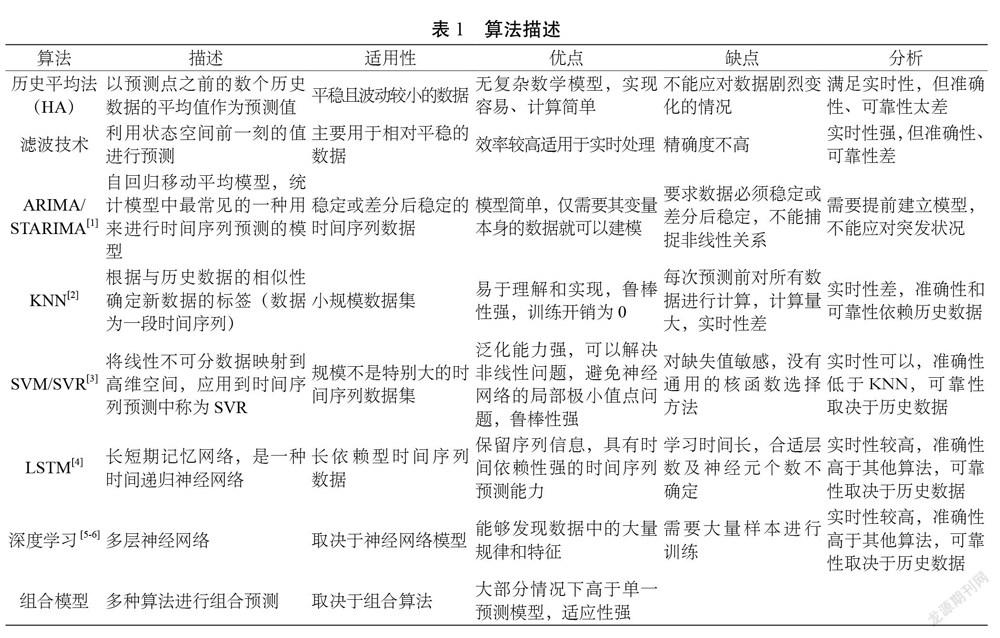
2 預測方法分類
目前的預測算法分為四類:簡單算法、參數化技術、非參數化技術和混合技術,其結構如圖2所示。表1詳細分析了各種算法的適用范圍和優缺點。
分析表1可以發現,單個預測算法中,LSTM最適合對短時交通數據進行短時預測,將其發展為深度神經網絡精確度將更高。當前對LSTM的改進為加入時空關系,提升了預測精度。但是隨著精確度的提高,模型越來越復雜,時間復雜度也越來越高,訓練模型花費的時間也越來越多。相反,ARIMA模型的精確度不高但簡單、易于構建,實時性較好。
組合模型是多種種算法進行組合預測,基本為聚類、粒子群、遺傳算法、交叉熵算法、非參數模型和參數模型之間的組合。其中,聚類可以分析道路網之間的時空關系,粒子群、遺傳算法、交叉熵算法常用來優化模型參數。為提高復雜模型的訓練效率,將特征提取算法如PCA與其他模型結合。
3 預測案例
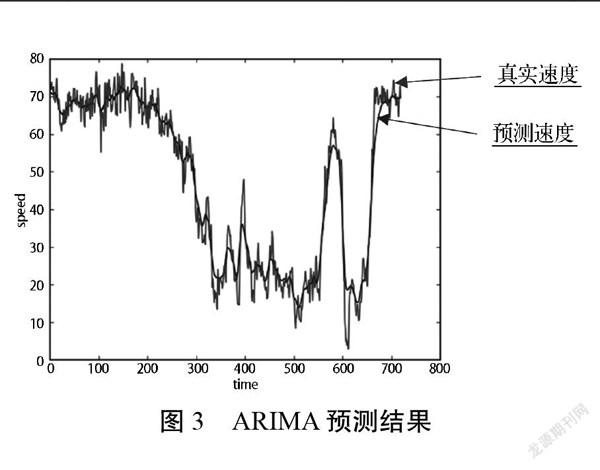
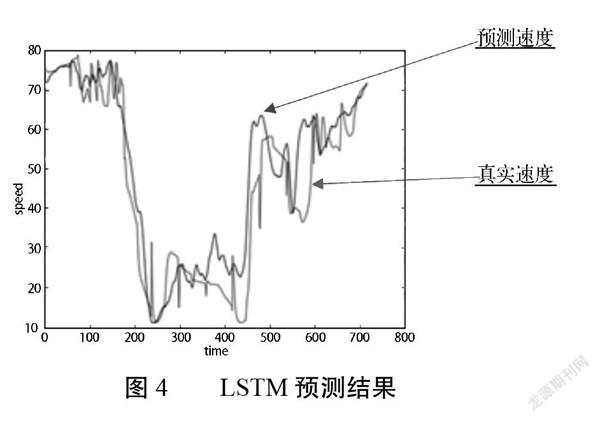
利用從上海交通中心獲取的2017年5月1號到2017年8月31號之間的交通速度數據,分別使用了ARIMA和LSTM進行了預測,速度數據時間間隔為2 min。
ARIMA 差分整合移動平均自回歸模型,又稱整合移動平均自回歸模型(移動也可稱作滑動),時間序列預測分析方法之一。ARIMA(p,d,q)模型可以表示為公式(1)。其中p為自回歸項數,q為滑動平均項數,d為使之成為平穩序列所做的差分次數(階數)。L是滯后算子。
(1)
使用數據集中某一天的速度數據進行預測,其結果如圖3~4。從圖中可以直觀發現,預測精度較高。
LSTM是一種時間循環神經網絡,適合處理和預測時間序列中間隔和延遲非常長的數據。作為非線性模型,LSTM可作為復雜的非線性單元用于構造更大型深度神經網絡。該文使用數據集中的部分數據為訓練集訓練模型,使用訓練好的模型預測交通速度,直觀發現精度較高。
4 總結
交通狀況影響因素很多,早期預測模型可以有效預測單一數據的變化,但在城市交通中,道路復雜,不能僅針對某一路段的歷史數據進行預測。神經網絡模型可以有效捕捉復雜情況下的特征,是以后智能交通系統中的重要組成技術。
參考文獻
[1]Kehagias D,Salamanis A,Tzovaras D. Speed pattern recognition technique for short-term traffic forecasting based on traffic dynamics[J]. Intelligent Transport Systems Iet,2015(6):646-653.
[2]Xia D,Wang B,Li H,et al. A distributed spatial-temporal weighted model on MapReduce for short-term traffic flow forecasting[J]. Neurocomputing,2016(C):246-263。
[3]Wu C H,Ho J M,Lee D T. Travel-time prediction with support vector regression[J]. IEEE Transactions on Intelligent Transportation Systems,2004(4):276-281.
[4]Ma X,Tao Z,Wang Y,et al. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data[J]. Transportation Research Part C,2015(54):187-197.
[5]Lv Y,Duan Y,Kang W,et al. Traffic Flow Prediction With Big Data: A Deep Learning Approach[J]. IEEE Transactions on Intelligent Transportation Systems,2015(2):865-873.
[6]Zhao Z,Chen W,Wu X,et al. LSTM network: a deep learning approach for short-term traffic forecast[J]. Iet Intelligent Transport Systems,2017(2):68-75.