直接力/氣動力復合控制技術發(fā)展綜述
2022-03-04 08:27:16郭建國彭謙周敏
航空兵器 2022年1期
郭建國 彭謙 周敏
摘 要:直接力/氣動力復合控制的本質(zhì)是利用直接力響應速度快的特性提升被控飛行器的機動性和快速性,能夠有效補償氣動力不足導致的氣動力控制響應慢問題。 本文闡述了直接力/氣動力復合控制系統(tǒng)的特性及關鍵問題,從發(fā)動機配置方式、國內(nèi)外直接力建模研究現(xiàn)狀、以及直接力控制干擾建模三方面介紹了直接力/氣動力復合控制系統(tǒng)建模方法,從控制方式、國內(nèi)外直接力/氣動力復合控制研究現(xiàn)狀、以及脈沖發(fā)動機點火算法三方面介紹了直接力/氣動力復合控制方法,給出了可行的發(fā)動機復合系統(tǒng)穩(wěn)定性分析方法,對直接力/氣動力復合控制未來的發(fā)展趨勢進行了展望,并對其關鍵技術進行了總結(jié)。
關鍵詞:直接力;氣動力;制導控制系統(tǒng);直接側(cè)向力;控制分配;脈沖發(fā)動機;點火算法
中圖分類號:TJ760;V249.1 ?文獻標識碼:?? A ?文章編號:1673-5048(2022)01-0001-13[SQ0]
0 引? 言
直接力控制利用發(fā)動機噴氣的反作用力產(chǎn)生推力,作用于被控對象從而實現(xiàn)控制任務,具有響應速度快、不受大氣環(huán)境影響的特性,適用于臨近空間、大氣層外等飛行環(huán)境[1]。 直接力/氣動力復合控制指直接力控制與氣動力控制復合或多種直接力復合的控制方法,本質(zhì)上是一種多執(zhí)行機構(gòu)組合協(xié)調(diào)控制系統(tǒng),利用直接力控制的快速響應能力補償氣動力不足導致的氣動力控制響應慢問題,進而提高控制精度。
在氣動力不足的場景下,引入直接力控制能顯著提升其被控對象性能。 直接力控制有直接側(cè)向力控制和推力矢量控制兩種。 直接側(cè)向力控制,又稱為反作用噴流控制,通過點燃側(cè)向脈沖發(fā)動機產(chǎn)生側(cè)向推力提供加速度或額外的力矩增量,可以有效地提高可用過載,減小響應時間,改善飛行末段控制性能,是一種成熟可靠的控制方式[2-4]。 推力矢量控制通過控制發(fā)動機推力相對彈軸的方向來產(chǎn)生機動飛行所需的控制力矩[5]。 由直接力控制產(chǎn)生的力/力矩增量與被控對象的飛行高度、速度均無關,大大提高了被控對象的機動性和快速性。
直接力/氣動力復合控制方法的提出與研究具有很強的工程應用價值。 隨著飛行器性能的不斷提升,防空系統(tǒng)面臨的威脅也在不斷升級,從飛機類目標轉(zhuǎn)向飛行速度更快、機動能力更強、威脅更大的目標,如彈道導彈、巡航導彈和高超聲速飛行器等[6-8]。 傳統(tǒng)攔截器采用純氣動的控制方式,調(diào)整舵偏轉(zhuǎn)產(chǎn)生操縱力矩,控制其所受氣動力,實現(xiàn)攔截器飛行控制。 氣動控制在稠密大氣環(huán)境中響應時間一般大于0.1 s;若在攔截末段飛行高度高、大氣稀薄的環(huán)境下,氣動控制的響應時間一般大于1 s,此時,純氣動控制不能及時響應制導指令,從而導致攔截失敗[2, 7, 9-11]。 另一方面,破片殺傷式戰(zhàn)斗部的破片質(zhì)量太小,即使成功命中,也不能對目標造成有效打擊[12]。 碰撞毀傷利用攔截彈與目標在高速碰撞中產(chǎn)生的動能進行毀傷,殺傷能力顯著強于傳統(tǒng)的破片殺傷[13],需要攔截器快速響應指令, 并精準碰撞目標關鍵部位。 直接力控制的響應時間一般為6~10 ms,且不受大氣環(huán)境密度變化影響[14-16]。 因此,提出了直接力/氣動力復合控制技術,將其作為在氣動力不足環(huán)境中工作的飛行器的控制核心。
直接力/氣動力復合控制技術被廣泛應用于氣動力不足的場景中,如防空反導系統(tǒng)中的攔截器和需要再入飛行的可重復使用飛行器。 典型型號有美國的攔截器PAC-3, THAAD, 可重復使用飛行器X-37B;俄羅斯的攔截器S-400系列中的9M96E/E2; 法國、意大利聯(lián)合研制的Aster-15/30等。 PAC-3采用姿控復合控制,在彈體前部加裝姿控發(fā)動機配合自旋來增強機動能力,主要用于對高度在40 km以下的彈道導彈飛行末段進行攔截[17];為了填補PAC-3攔截高度低的缺點,美國研發(fā)了姿軌控復合控制的THAAD導彈,采用軸對稱無翼無舵的設計,可攔截高度范圍為40~150 km[18]。 美國X-37B采用了翼身融合的升力體氣動布局,運行軌道高度為約400 km的低地球軌道[19],其復合控制系統(tǒng)包含氣動舵面、反作用控制系統(tǒng)和軌道機動系統(tǒng),前后RCS共28個,其噴口大小和氣流方向都有特別設計,相較于攔截器更為復雜[20]。 俄羅斯S-400系列中的9M96E/E2導彈采用軌控復合控制,在導彈質(zhì)心加裝微型噴管軌控發(fā)動機,快速修偏能力強[21]。
本文分析了直接力/氣動力復合控制特性及關鍵問題,介紹了直接力/氣動力復合控制系統(tǒng)建模方法、穩(wěn)定性分析方法及控制方法,并在此基礎上展望了直接力/氣動力復合控制技術未來的相關研究及發(fā)展方向。
1 直接力/氣動力復合控制特性及關鍵問題
直接力/氣動力復合控制(簡稱直/氣復合控制)本質(zhì)上是一種多執(zhí)行機構(gòu)協(xié)調(diào)控制系統(tǒng),適用于對系統(tǒng)響應速度、機動能力有較高要求的各種應用場景,特性如下:
(1) 多輸入的多執(zhí)行機構(gòu)組合系統(tǒng)
直/氣復合控制至少有兩種控制量,屬于多輸入系統(tǒng)。 以直接側(cè)向力/氣動力復合控制攔截器為例,控制系統(tǒng)的執(zhí)行機構(gòu)為氣動舵和姿/軌控脈沖發(fā)動機,輸入控制量為舵偏角和脈沖發(fā)動機的開關序列。
(2) 直接力執(zhí)行機構(gòu)存在控制受限問題
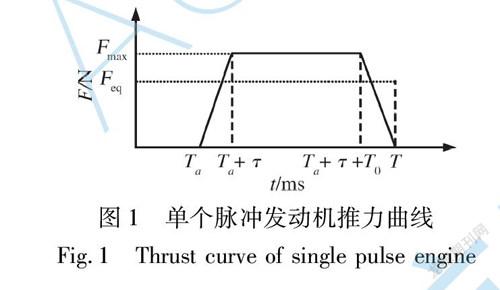
提供直接力控制量的執(zhí)行機構(gòu)以脈沖發(fā)動機最為常見。 脈沖發(fā)動機的基本工作曲線如圖1所示。
由圖可以看出,脈沖發(fā)動機屬于離散控制,可能具有工作時間受限、推力大小受限等控制受限問題;結(jié)合實際工程應用,脈沖發(fā)動機還存在安裝位置受限、使用次數(shù)受限、不可重復使用等控制受限問題。
(3) 異類執(zhí)行機構(gòu)協(xié)調(diào)控制
氣動舵的控制輸入為舵偏角,可以在一定范圍內(nèi)連續(xù)變化,屬于連續(xù)控制執(zhí)行機構(gòu);脈沖發(fā)動機的控制輸入為脈沖發(fā)動機的開關序列,屬于離散控制執(zhí)行機構(gòu);另一方面,姿/軌控發(fā)動機復合控制也會因發(fā)動機工作特性不同,同時存在連續(xù)控制量與離散控制量。 因此,直/氣復合控制系統(tǒng)中往往存在連續(xù)/離散控制量耦合,在其控制系統(tǒng)設計中需要協(xié)調(diào)異類執(zhí)行機構(gòu)。
(4) 存在力/力矩強耦合
力矩控制量影響被控對象的姿態(tài),而力控制量影響被控對象的運動軌跡。 氣動力控制量通過提供力矩增量調(diào)整被控對象姿態(tài),從而實現(xiàn)進一步的控制;直接力控制量根據(jù)執(zhí)行機構(gòu)的配置位置可以提供力/力矩兩種控制量,甚至同時提供力/力矩兩種控制量。
由于以上特性,直/氣復合控制系統(tǒng)研究中存在以下關鍵問題:
(1) 執(zhí)行機構(gòu)工作特性復雜,建模困難;
(2) 控制形式多樣,執(zhí)行機構(gòu)選擇困難;
(3) 同時存在多種異類控制量且控制受限,設計協(xié)調(diào)控制方法并盡可能發(fā)揮復合控制性能;
(4) 耦合問題嚴重,穩(wěn)定性分析難;
(5) 執(zhí)行機構(gòu)間互相影響,干擾復雜;
(6) 力/力矩控制量強耦合,導致制導控制系統(tǒng)耦合。
現(xiàn)有研究在直/氣復合控制系統(tǒng)建模、復合控制方法設計方面有較多的成果,在復合控制系統(tǒng)穩(wěn)定性分析、制導控制系統(tǒng)耦合等方面缺乏研究。
2 姿/軌控發(fā)動機配置及建模
氣動力控制指通過調(diào)整氣動舵產(chǎn)生額外力矩改變導彈姿態(tài),從而改變其氣動力的傳統(tǒng)控制方式。 氣動力控制是一種很成熟的控制方法,本節(jié)主要以復合控制攔截器為例,從發(fā)動機配置方式、直接力建模方法國內(nèi)外研究現(xiàn)狀及控制干擾三方面介紹直接側(cè)向力在復合控制系統(tǒng)中的建模方法。
2.1 姿/軌控發(fā)動機配置方式
側(cè)噴脈沖發(fā)動機是提供直接側(cè)向力應用最廣泛的執(zhí)行機構(gòu),具有開關性質(zhì)[22],點火后能夠快速產(chǎn)生直接側(cè)向推力,但存在嚴重的控制受限問題,如工作時間受限、推力大小受限、安裝位置受限、使用次數(shù)有限、不可重復使用等。
根據(jù)脈沖發(fā)動機的安裝位置,直接側(cè)向力控制又分為姿態(tài)控制與軌道控制兩種。
(1) 姿態(tài)控制通過安裝在相對質(zhì)心一定距離的側(cè)噴發(fā)動機提供直接力產(chǎn)生轉(zhuǎn)動力矩,快速改變導彈姿態(tài),最后依靠氣動力來產(chǎn)生過載。 姿控脈沖發(fā)動機可安裝在質(zhì)心前或質(zhì)心后。 若姿控裝置安裝在質(zhì)心前,在其作用下由彈體姿態(tài)產(chǎn)生的氣動過載與姿控直接力方向相同,控制效率更高;若姿控裝置安裝在質(zhì)心后,在其作用下由彈體姿態(tài)產(chǎn)生的氣動過載與姿控直接力方向相反,控制效率會被抵消一部分,但對流場影響更小[23]。 實際工程應用中,姿控裝置大多安裝在質(zhì)心前。
(2) 軌道控制通過安裝在質(zhì)心附近的側(cè)噴發(fā)動機提供直接力形成橫向推力,快速改變導彈加速度且不受氣動環(huán)境影響,可直接使質(zhì)心移動,從而實現(xiàn)機動。
無論姿控還是軌控,直接側(cè)向力都由垂直于彈體軸線徑向的側(cè)噴發(fā)動機提供。 以直/氣復合控制攔截器為例,氣動舵、姿控發(fā)動機、軌控發(fā)動機在彈體上的典型分布如圖2所示,有xp>xG>xz。
建模方法與配置緊密相關。 基于執(zhí)行機構(gòu)組合的直/氣復合控制典型配置方式有以下幾種:
(1) 姿/軌控發(fā)動機復合控制
姿/軌控發(fā)動機復合控制方式受氣動環(huán)境影響小,適用于大氣稀薄環(huán)境或真空環(huán)境中。 姿/軌控脈沖發(fā)動機復合控制的典型配置是分通道控制,如大氣層外殺傷飛行體(EKV)。
姿/軌控發(fā)動機復合控制執(zhí)行機構(gòu)配置方式如圖3所示。 噴口2和5負責偏航通道控制,噴口1+4組合、3+6組合負責俯仰通道控制,噴口1+6組合、3+4組合負責滾轉(zhuǎn)通道控制,各噴口共用同一個燃燒室,姿控脈沖發(fā)動機可提供的直接力總沖固定,但各噴口的工作時間可以通過噴口的開關調(diào)整。 軌控脈沖發(fā)動機的噴口1和3負責偏航通道運動,噴口2和4負責俯仰通道運動,其工作時間可調(diào)、推力大小可調(diào)。
(2) 姿控/氣動舵復合控制
姿控/氣動舵復合控制配置方式根據(jù)被控對象飛行方式,可分為滾轉(zhuǎn)與不滾轉(zhuǎn)兩種。
飛行器滾轉(zhuǎn)會造成俯仰/偏航通道的嚴重耦合,發(fā)動機噴口位置隨著彈體滾轉(zhuǎn)而變化,可提供的直接側(cè)向力方向更靈活,但脈沖發(fā)動機的點火策略設計復雜。 姿控/氣動舵復合控制的姿控脈沖發(fā)動機配置如圖4所示,側(cè)噴脈沖發(fā)動機噴口位置固定,數(shù)圈脈沖發(fā)動機噴口交錯分布,各噴口可提供一次脈沖推力。
對于不滾轉(zhuǎn)飛行器,各通道控制可解耦,脈沖發(fā)動機配置及點火策略設計相對簡單,但需要設計控制器保證攔截器的滾轉(zhuǎn)通道穩(wěn)定。 不滾轉(zhuǎn)姿控/氣動舵復合控制的典型配置是美國X-37B飛行器,如圖5所示,其反作用控制系統(tǒng)(RCS)安裝在飛行器后體,氣噴口大小和方向根據(jù)輔助配平和控制需求進行了特別設計[20]。
(3)? 軌控/氣動舵復合控制
軌控/氣動舵復合控制用于對飛行軌跡進行快速修偏,典型型號是法國Aster-15/30[13, 27],其軌控發(fā)動機在飛行器質(zhì)心位置均勻分布4個噴口,與圖3中的軌控發(fā)動機分布類似。
2.2 直接力建模研究現(xiàn)狀
氣動舵屬于連續(xù)的執(zhí)行機構(gòu),建模方式很成熟。 對于復合系統(tǒng)中的直接力控制量,現(xiàn)有研究采用了不同的描述方法。
直接力模型建立在攔截器運動學/動力學模型的基礎上,對于滾轉(zhuǎn)攔截器,則采用準坐標系下的運動學/動力學模型[28]。 在建立直接力控制的數(shù)學模型前,首先明確其執(zhí)行機構(gòu)特性。 脈沖發(fā)動機燃料有固體和液體兩種,固體脈沖發(fā)動機工作時間固定、推力固定;而液體脈沖發(fā)動機可通過控制液體燃料的流量隨意控制發(fā)動機的開啟和關閉,使推力大小精確可調(diào)[23]。 這里主要闡述直/氣復合控制系統(tǒng)建模研究中主流的幾種直接力建模方法。
由于發(fā)動機結(jié)構(gòu)、燃料等不同,其產(chǎn)生的推力有連續(xù)可調(diào)或大小固定兩種作用形式,推力大小固定的情況下又分為脈沖寬度可調(diào)或固定。 脈沖寬度可調(diào)的直接力執(zhí)行機構(gòu)便于驗證一些控制方法的應用,但是從加工工藝和實際應用的角度看,脈沖寬度固定的發(fā)動機占有一定的優(yōu)勢[29]。 研究者根據(jù)需求基于以下幾類直接力工作方式建模。
(1) 大小可調(diào)的連續(xù)直接力控制量
對于直/氣復合控制方法的研究可以追溯到20世紀90年代初期,早期研究對直/氣復合控制系統(tǒng)進行簡化處理,不考慮直接力執(zhí)行機構(gòu)的復雜特性,往往將其視為大小可調(diào)的連續(xù)控制[30-31]或其他類似的形式[32]。 1991年,Weil等[30]在平衡飛行狀態(tài)建立了縱向通道線性化導彈模型,假設直接力控制量是連續(xù)可調(diào)的,利用線性二次型調(diào)節(jié)器(LQR)設計控制律。 研究結(jié)果表明,復合控制響應速度更快,且在不犧牲性能的前提下,對氣動舵效能要求比純氣動控制更低。 1998年,Wise等[31]將側(cè)向推力視為連續(xù)可調(diào)控制量,研究了推力矢量/側(cè)向推力控制(TVC/RCS)交替控制敏捷導彈做大攻角機動的復合控制方法。 Innocenti等[32]是在直/氣復合控制領域研究中采用滑模變結(jié)構(gòu)方法的代表人物,他們分別針對大、小攻角建立控制模型,將直接側(cè)向力視為通過閥門開度調(diào)整的、具有一階系統(tǒng)特性的連續(xù)量,采用滑模變結(jié)構(gòu)設計控制器。
部分研究為了適應基于連續(xù)系統(tǒng)的先進控制方法,忽略了直接力的離散特性而將其視為連續(xù)力[33-38]。 文獻[33-34]將直接力控制量視為具有一階系統(tǒng)響應特性的連續(xù)量,基于固定/有限時間收斂的滑模控制方法設計了復合控制系統(tǒng)。 文獻[35]將直接力視為連續(xù)可調(diào)控制量,以加速度和轉(zhuǎn)速作為輸出變量,采用反饋線性化技術設計復合控制系統(tǒng)。 文獻[36]將直接力視為大小固定、作用時間可調(diào)的連續(xù)量,通過調(diào)整占空比,實現(xiàn)一定范圍內(nèi)任意可調(diào)的連續(xù)直接力控制量,基于執(zhí)行機構(gòu)效能歸一化和終端滑模方法設計了直/氣復合控制器。 文獻[37]將直接力看作是通過閥門調(diào)整的連續(xù)量,基于滑模控制方法,設計了導彈大攻角機動的直/氣復合控制律。 文獻[38]分別用自適應滑模控制和模糊邏輯設計了氣動力、直接力子系統(tǒng),最后利用遺傳算法將其協(xié)調(diào)組合成直/氣復合控制系統(tǒng)。
將直接力視為連續(xù)控制量的復合控制系統(tǒng)設計簡單,且適用于各種控制方法,但卻是一種過于理想的簡化方法,與實際工程應用差距較大。
(2) 通過脈沖調(diào)制器轉(zhuǎn)化為離散的直接力控制量
部分研究著重考慮了直接力的離散特性,同時又兼顧設計的便捷。 先假設直接力是連續(xù)的,通過控制器得到控制量后,再通過脈沖調(diào)制器將連續(xù)控制量轉(zhuǎn)化為離散控制量。 文獻[39]采用智能算法實現(xiàn)控制量分配,并設計了基于模糊控制的姿控發(fā)動機點火算法。 文獻[40]假設直接力是連續(xù)控制量,設計了直接力指令與氣動力指令間的轉(zhuǎn)換關系,利用三回路方法得到混合控制量。 文獻[41]設計了快、慢雙環(huán)回路控制系統(tǒng),利用滑模控制方法得到需用控制力矩,并采用鏈式遞增融合分配直/氣控制量。 文獻[39-41]都是在得到需用直接力控制量后,利用脈沖調(diào)寬調(diào)頻(PWPF),將連續(xù)控制轉(zhuǎn)化為離散控制量傳遞給直接側(cè)向力執(zhí)行機構(gòu)。
先假設直接力為連續(xù)控制量,再通過脈沖調(diào)制器轉(zhuǎn)化為離散控制量輸入執(zhí)行機構(gòu)的方法,具有連續(xù)直接力控制的優(yōu)勢,如設計簡單、適用于各種控制方法等,同時兼顧了執(zhí)行機構(gòu)的離散特性,更貼合實際工程應用。 然而,其使用的執(zhí)行機構(gòu)類型受限,且不能發(fā)揮直/氣復合控制系統(tǒng)的最大效能,尤其是對于推力大小不可調(diào)的脈沖發(fā)動機,這種建模方法會導致控制指令與執(zhí)行機構(gòu)的嚴重不匹配。
(3) 離散的直接力控制量
脈沖發(fā)動機是各類直接力執(zhí)行機構(gòu)中特性最為復雜、控制受限最嚴重的,但由于其成熟的制造工藝和相對低廉的成本,目前被廣泛應用于直/氣復合飛行器。 部分研究盡可能地使直/氣復合控制模型貼合脈沖發(fā)動機的實際特性考慮其控制受限問題,在模型中假設直接力大小固定,且工作周期不可調(diào),具有開關性質(zhì)[42-46]。 文獻[42]認為單個脈沖發(fā)動機推力大小和作用時間都是固定不變的常數(shù),采用自適應高階滑模控制方法和二次規(guī)劃最優(yōu)化方法,得到了氣動舵及脈沖發(fā)動機的控制量。 文獻[43]考慮了脈沖發(fā)動機推力大小和作用時間固定的特性,并在此基礎上,充分利用氣動控制減少消耗脈沖發(fā)動機的數(shù)量。 文獻[45]用梯形剖面近似描述姿控脈沖發(fā)動機推力的離散特性,應用非線性系統(tǒng)理論對俯仰平面內(nèi)姿控系統(tǒng)模型進行分析,詳細闡述了模型簡化原理,采用滑模變結(jié)構(gòu)控制理論設計了復合控制律,并根據(jù)氣動力和直接側(cè)向力控制的特點實現(xiàn)控制指令。 文獻[46]充分考慮了脈沖發(fā)動機的工作特性,包括不可重復使用、推力響應曲線等,當需要的推力積分等于脈沖發(fā)動機單次工作提供的力時,啟動對應的脈沖發(fā)動機。
考慮了脈沖發(fā)動機推力大小和作用時間固定的控制受限問題,并以脈沖發(fā)動機點火個數(shù)作為控制輸入[47-50]。 文獻[47]將氣動舵和脈沖發(fā)動機視為內(nèi)外回路分別設計控制器,其中氣動舵控制回路使用有限時間穩(wěn)定理論,脈沖發(fā)動機控制回路使用Backstepping方法,在整個控制系統(tǒng)中通過控制角速度間接實現(xiàn)攻角的反饋。 文獻[48]除了考慮脈沖發(fā)動機的推力大小和工作時間固定外,還考慮了單個脈沖發(fā)動機使用過后不可重復啟動的特性,并且在建模中引入了側(cè)向噴流氣動干擾及馬格努斯力矩,提出了一種分階段復合控制策略,并利用整數(shù)線性規(guī)劃方法,計算需用脈沖發(fā)動機數(shù)量。 文獻[49]將滑模控制方法與反步法結(jié)合設計控制器,利用離散的脈沖發(fā)動機實現(xiàn)滑模控制的不連續(xù)控制量,通過氣動舵實現(xiàn)滑模控制的連續(xù)控制量,使被控狀態(tài)的有限時間收斂。 文獻[50]采用混合控制系統(tǒng)方法設計控制器,先完成氣動舵連續(xù)系統(tǒng)設計,再完成脈沖發(fā)動機離散控制系統(tǒng)設計。
結(jié)合脈沖發(fā)動機的實際工作特性,離散的直接力控制量的復合控制系統(tǒng)設計復雜,但是能夠充分反映執(zhí)行機構(gòu)特性,發(fā)揮直/氣復合控制系統(tǒng)的最大效能。
2.3 直接力/氣動力復合控制干擾
發(fā)動機復合控制利用直接力控制提升被控對象的性能,但同時引入了側(cè)向噴流氣動干擾、發(fā)動機開關延遲干擾以及各通道間耦合干擾等。
(1) 側(cè)向噴流氣動干擾
側(cè)噴發(fā)動機噴流和高速飛行的飛行器表面及周圍氣流發(fā)生相互作用,在噴口周圍及其上、下游流場形成復雜的流動,嚴重影響側(cè)噴發(fā)動機效率和導彈表面流場,使作用在導彈上的力分布發(fā)生劇烈的改變,造成側(cè)向噴流氣動干擾[16]。 側(cè)向噴流氣動干擾與噴流、來流及導彈外形等相關,具有很大的非線性及不確定性,嚴重影響直接力控制的精度及響應速度,是直/氣復合控制系統(tǒng)設計中必須考慮的因素[51-52]。 目前,針對直接力側(cè)向噴流的研究包括攻角、噴口數(shù)量和布局、噴口型面和形狀等對側(cè)向噴流干擾流場的影響,以及側(cè)向噴流與舵面的互相干擾等方面已有較成熟的結(jié)論[53]。
在建立動力學模型時引入側(cè)向噴流氣動干擾的影響,以側(cè)向噴流產(chǎn)生的干擾力和力矩放大因子形式表示[48, 54],從而使控制器具備抑制側(cè)向噴流氣動干擾的能力。
(2) 發(fā)動機開關延遲干擾
如圖1所示,發(fā)動機開/關機時存在延遲干擾,包括發(fā)動機響應延遲和性能上升/下降延遲,導致發(fā)動機不能精準執(zhí)行控制指令。
發(fā)動機延遲相關參數(shù)及單個周期內(nèi)的推力曲線可以在彈下通過實驗測算。 通過在控制律設計中引入這些參量,可以最大程度地削弱開關延遲干擾的影響。
(3) 各通道間耦合干擾
由于發(fā)動機噴口相對彈體位置固定,而彈體姿態(tài)在飛行過程中一直維持著動態(tài)穩(wěn)定,導致發(fā)動機很難在期望方向提供準確且穩(wěn)定的直接力,從而引起了各通道間的耦合。
各通道間的耦合干擾是不可避免的,在控制器設計中引入彈體姿態(tài)和當前時刻發(fā)動機噴口朝向,不以完全解耦的方式分別設計各通道控制器,而是將控制量引起的通道間耦合引入控制器設計中,根據(jù)該時刻噴口朝向有針對性地給出控制指令,將不利干擾轉(zhuǎn)化為有利干擾。
3 直/氣復合控制系統(tǒng)穩(wěn)定性分析方法
穩(wěn)定是任何一個系統(tǒng)正常工作的先決條件。 直/氣復合控制系統(tǒng)包含多種、異類執(zhí)行機構(gòu),氣動力控制一般為連續(xù)控制,直接力控制則可能具有離散特性,致使復合系統(tǒng)中不可避免地存在連續(xù)/離散耦合問題;直接力的作用點不同,則會導致力/力矩耦合問題。 因此,傳統(tǒng)的連續(xù)系統(tǒng)單一執(zhí)行機構(gòu)的穩(wěn)定性分析方法不適用于直/氣復合控制系統(tǒng)。 目前,直/氣復合控制領域相關的研究大多僅通過數(shù)學仿真驗證其穩(wěn)定性,對其穩(wěn)定性的理論推導和分析尚不多見,下面將基于現(xiàn)有的研究介紹復合控制系統(tǒng)穩(wěn)定分析的思路和進展。
(1) 切換系統(tǒng)穩(wěn)定性分析
直/氣復合控制系統(tǒng)中存在異類執(zhí)行機構(gòu),啟用不同的執(zhí)行機構(gòu),被控對象的模型隨即發(fā)生改變。 因此,可以采用切換系統(tǒng)穩(wěn)定性分析的有關思路和結(jié)論,分析存在復雜耦合和控制受限問題的直/氣復合控制系統(tǒng)的穩(wěn)定性。 切換系統(tǒng)穩(wěn)定性分析有以下幾種方法[55-56]:
a.基于公共李雅普諾夫函數(shù)的切換系統(tǒng)穩(wěn)定性分析
該方法難點在于確定公共李雅普諾夫函數(shù)。 公共李雅普諾夫函數(shù)一般僅是判斷系統(tǒng)穩(wěn)定的充分條件,在找不到公共李雅普諾夫函數(shù)或證明系統(tǒng)不存在公共李雅普諾夫函數(shù)的情況下,都不能斷言切換系統(tǒng)的穩(wěn)定性[55, 57]。
b.基于多李雅普諾夫函數(shù)的切換系統(tǒng)穩(wěn)定性分析
多李雅普諾夫函數(shù)方法通過為每一個子系統(tǒng)選擇一個李雅普諾夫函數(shù)來避免確定公共李雅普諾夫函數(shù)的問題。 基于多李雅普諾夫函數(shù)研究成果可以得到結(jié)論:假設系統(tǒng)有限時間內(nèi)只能切換有限次,若切換時刻的能量是遞減的,則系統(tǒng)是漸近穩(wěn)定的[55, 58]。
c.基于駐留時間的切換系統(tǒng)穩(wěn)定性
基于駐留時間的判定方法是:系統(tǒng)在每個子系統(tǒng)的駐留時間足夠長時,能保證切換系統(tǒng)的穩(wěn)定性[59-60]。
d.基于矩陣測度的切換系統(tǒng)穩(wěn)定性分析
該方法的優(yōu)點是不需要構(gòu)造李雅普諾夫函數(shù),只需通過計算子系統(tǒng)矩陣測度即可判斷切換系統(tǒng)的穩(wěn)定性; 缺陷是保守性大,判斷結(jié)果不準確[61]。
(2) 基于相平面的穩(wěn)定性分析
相平面分析的方法作為一種圖解法,不用設計函數(shù)或求解方程,通過相軌跡反映系統(tǒng)的運動,即可分析系統(tǒng)的穩(wěn)定性。
文獻[40]和文獻[62]基于描述函數(shù)與相平面分析了直/氣復合控制系統(tǒng)的穩(wěn)定性。 文獻[40]利用脈沖調(diào)制器得到了離散的直接側(cè)向力控制量,給出了脈沖調(diào)制器的非線性描述函數(shù),通過脈沖調(diào)制器的描述函數(shù)與控制系統(tǒng)中線性環(huán)節(jié)的奈奎斯特曲線分析了直/氣復合系統(tǒng)的穩(wěn)定性。 文獻[62]基于描述函數(shù)相關理論和奈奎斯特曲線,分析了具有非線性量化特性和死區(qū)特性的脈沖發(fā)動機對復合控制系統(tǒng)穩(wěn)定性的影響。
4 直/氣復合控制方法
為了在稀薄大氣環(huán)境中實現(xiàn)各種高機動任務,飛行器控制系統(tǒng)設計中越來越多地采用了能夠顯著提高響應速度的直/氣復合控制技術,但也隨之帶來了許多設計上的問題。 本節(jié)以直/氣復合控制攔截器為例,介紹直/氣復合控制方式、國內(nèi)外直/氣復合控制方法研究現(xiàn)狀及脈沖發(fā)動機點火算法。
4.1 直/氣復合控制方式
直接力大小和響應速度不受氣動環(huán)境和導彈飛行速度影響,其高空優(yōu)勢尤為突出,適用空域更大[63];氣動力控制嚴重依賴于氣動環(huán)境,在大氣稠密環(huán)境中優(yōu)勢明顯,且相關控制理論與工程應用都很成熟。 直接力控制響應速度快、不受環(huán)境影響,但相較于力矩控制,需要提供更多的輸入能量來實現(xiàn)[2]。 對于直/氣復合控制來說,各個控制量能否良好地配合,直接決定了復合控制系統(tǒng)的性能優(yōu)劣[2, 64-65]。
根據(jù)執(zhí)行機構(gòu)的不同,直/氣復合控制可分為三種:姿控復合式、軌控復合式和姿/軌控復合式。
(1) 姿控復合式指姿控與氣動舵控制相結(jié)合的復合控制系統(tǒng),采用力矩控制的方式,通過改變導彈的飛行姿態(tài)產(chǎn)生氣動力,進而控制導彈飛行彈道。 現(xiàn)有典型攔截器型號為美國PAC-3。
(2) 軌控復合式指軌控與氣動舵控制相結(jié)合的復合控制系統(tǒng),發(fā)動機與氣動舵分別提供力控制和力矩控制,力控制調(diào)整導彈飛行彈道,力矩控制調(diào)整導彈飛行姿態(tài)。 現(xiàn)有典型攔截器型號為俄羅斯S-400系列中的9M96E/E2、意大利/法國聯(lián)合研制的Aster-15/30。
(3) 姿/軌控復合式指姿控與軌控相結(jié)合的復合控制系統(tǒng),主要用于稀薄大氣或真空環(huán)境中。 軌控發(fā)動機提供力控制來調(diào)整導彈飛行彈道;姿控發(fā)動機提供力/力矩混合控制,其中,以力矩控制為主,用于調(diào)整導彈飛行姿態(tài)。 現(xiàn)有典型攔截器型號為美國THAAD。
4.2 直/氣復合控制方法研究現(xiàn)狀
多執(zhí)行機構(gòu)的復合控制系統(tǒng)與單一執(zhí)行機構(gòu)控制系統(tǒng)不同,除了基于各種控制理論的控制律外,還包含復合協(xié)調(diào)控制模式。 復合協(xié)調(diào)控制模式是多個控制量協(xié)調(diào)工作的框架,從結(jié)構(gòu)上可分為四種模式[55, 66]:控制量串聯(lián)、控制量切換、直接力前饋、控制量并行。 下面以直/氣復合為例,介紹上述四種協(xié)調(diào)控制模式。
(1) 直/氣串聯(lián)工作
直/氣串聯(lián)工作方案考慮到多種執(zhí)行機構(gòu)的工作特性和工作周期不同,將氣動力、直接力控制系統(tǒng)視為內(nèi)、外回路,分別設計控制器[29, 47-48, 50, 67],如圖6所示。
由于氣動舵的采樣控制周期遠小于脈沖發(fā)動機的工作周期,可以視為連續(xù)系統(tǒng)設計,文獻[29]和文獻[50]將氣動舵控制系統(tǒng)視為連續(xù)的內(nèi)環(huán)系統(tǒng)設計了控制器,之后,針對包含舵控系統(tǒng)反饋量的連續(xù)系統(tǒng)設計脈沖發(fā)動機的離散控制器。 在文獻[50]的基礎上,文獻[67]充分考慮了氣動舵的飽和以及脈沖發(fā)動機點火序列與實際需用直接力的偏差,在保證導彈動態(tài)響應能力的情況下,減少了發(fā)動機的消耗。 文獻[47]采用有限時間穩(wěn)定理論設計氣動力控制的內(nèi)回路以求實現(xiàn)最短時間控制,采用反步法設計直接側(cè)向力控制的外回路以求加快控制系統(tǒng)的響應速度,并在整個控制系統(tǒng)中引入“隱攻角反饋”,進一步改善系統(tǒng)的響應性能。 文獻[48]提出了一種分時串聯(lián)的復合控制策略,利用整數(shù)線性規(guī)劃方法得到脈沖發(fā)動機需用數(shù)量作為控制輸入,基于動態(tài)逆控制和自抗擾控制方法設計氣動舵控制律。
將直/氣復合控制分為內(nèi)、外回路分別設計控制器的方法,能夠充分考慮執(zhí)行機構(gòu)工作特性和采樣周期的差異,靈活選擇兩回路的控制器實現(xiàn)方法,同時也降低了復合控制系統(tǒng)設計的復雜性,但缺乏對直/氣協(xié)調(diào)作用的考慮,不能充分發(fā)揮直/氣復合控制系統(tǒng)的性能。
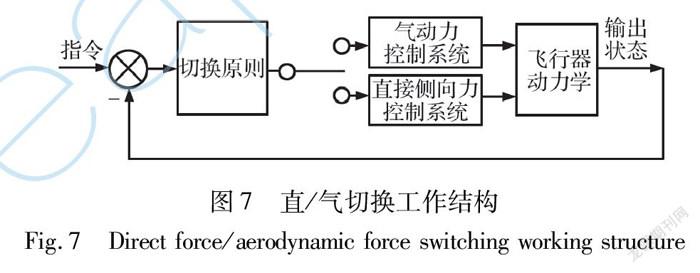
(2) 直/氣切換工作
直/氣切換工作方案中,直接力控制系統(tǒng)與氣動力控制系統(tǒng)不同時工作,而是依據(jù)直接力判別條件選擇其中之一實現(xiàn)控制指令,在采用氣動力執(zhí)行機構(gòu)的控制輸入時,不考慮直接力的作用,反之亦然。 文獻[68]采用切換工作結(jié)構(gòu)分別設計氣動力控制律與直接側(cè)向力控制律,并結(jié)合模糊控制方法設計直接側(cè)向力判別條件,如圖7所示。 文獻[69]在保證氣動力和直接力系統(tǒng)都穩(wěn)定的情況下,分別設計兩系統(tǒng)控制律,并基于狀態(tài)反饋設計切換律,給出了氣動力和直接力系統(tǒng)的切換序列。
切換工作方案的特點是設計簡單,不存在多執(zhí)行機構(gòu)同時作用的情況,缺陷是缺乏執(zhí)行機構(gòu)間的協(xié)調(diào),不能發(fā)揮直/氣復合控制系統(tǒng)的最大性能。
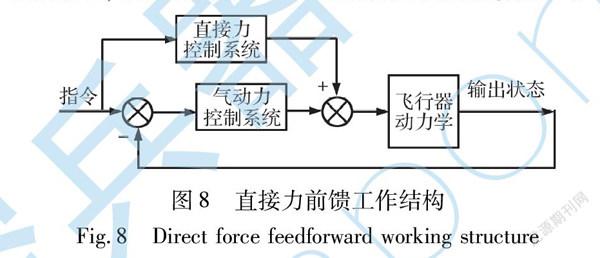
(3) 直接力前饋工作
直接力前饋工作方案以前饋-反饋雙回路的結(jié)構(gòu)設計直/氣復合控制系統(tǒng),氣動力控制作為反饋回路,在此基礎上加入直接力控制作為前饋回路,如圖8所示。 前饋回路的直接力控制主要用于調(diào)整飛行器在大機動運動下的動態(tài)過程,在穩(wěn)態(tài)或者非機動運動情況下則無需使用[70]。
文獻[71]基于反饋和前饋的系數(shù)圖表方法設計控制器,其中氣動力控制作為反饋控制,直接力控制作為前饋控制。 文獻[70]基于前饋-反饋結(jié)構(gòu)設計了直/氣復合控制系統(tǒng),采用進化策略完成了系統(tǒng)參數(shù)的多目標優(yōu)化。
直接力前饋的方案相較于串聯(lián)、切換方案增加了直接力/氣動力控制的配合,但設計略復雜,且同樣沒有將直接力/氣動力控制視為系統(tǒng)的多個輸入同時進行設計,不能發(fā)揮直/氣復合控制系統(tǒng)的最大性能。
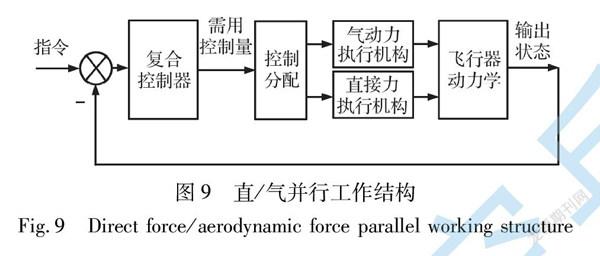
(4) 直/氣并行工作
由于異類執(zhí)行機構(gòu)結(jié)構(gòu)、特性差異較大,多采用復合控制器、控制分配策略以及各執(zhí)行機構(gòu)控制律分別獨立設計的并行工作結(jié)構(gòu)。 這種工作結(jié)構(gòu)泛用性強,設計靈活,是多執(zhí)行機構(gòu)復合控制領域中最常用的方法,也是當前的研究熱點[66, 72-73]。
如圖9所示,直/氣并行工作方案根據(jù)實際控制指令,先通過復合控制器得到整個系統(tǒng)的需用控制量,比如根據(jù)攻角指令得到需用力矩,再依據(jù)控制分配策略,將需用控制量分配到直接力和氣動力兩種執(zhí)行機構(gòu),最后由這兩種執(zhí)行機構(gòu)共同實現(xiàn)系統(tǒng)的需用控制量[74]。
基于并行方案的直/氣復合控制系統(tǒng)可分為復合控制器和控制分配兩部分,在此基礎上,設計者可以分別設計控制器與控制分配策略,即保留控制器結(jié)構(gòu),再通過將所需控制量分配給直接力控制和氣動力控制分別實現(xiàn)[34, 73-74]。 現(xiàn)有研究成果說明,控制分配是并行工作結(jié)構(gòu)的多執(zhí)行機構(gòu)復合控制的核心,控制分配策略的優(yōu)劣會嚴重影響系統(tǒng)的控制效率[34, 75-76]。
控制分配策略是并行工作方案的核心,根據(jù)控制分配策略中是否有實時考慮執(zhí)行機構(gòu)的特性,分為靜態(tài)控制分配和動態(tài)控制分配。
a. 靜態(tài)控制分配
靜態(tài)控制分配沒有考慮執(zhí)行機構(gòu)特性,但相對動態(tài)控制分配計算量小。 常見的靜態(tài)分配方法包括直接分配法[41, 73, 77]、鏈式遞增分配法[78]、線性規(guī)劃分配法[79]和智能算法[39]。
直接分配法基于某一指標給出一個執(zhí)行機構(gòu)選擇方案;鏈式遞增分配法按照一定次序使用控制量,并以飽和為控制量更換條件。 在直/氣復合控制中,一般將氣動力控制作為主控制量,直接力控制作為次控制量,當主控制量飽和后,啟用次控制量。 直接分配法和鏈式遞增分配法都是基于某種規(guī)則的靜態(tài)控制分配方法,具有計算量小、設計簡單、直觀、可以彈上實時解算的優(yōu)勢,但不能發(fā)揮直/氣復合控制的最大性能。 線性規(guī)劃分配法和智能算法則屬于優(yōu)化方法,利用優(yōu)化算法獲得性能指標函數(shù)的最優(yōu)解,設計靈活,可以實現(xiàn)各種復雜約束,相較于前兩者控制性能更好,但往往具有計算量大,需要離散規(guī)劃、在線匹配的特點。
動壓由大氣密度和飛行速度共同決定,能夠有效評估執(zhí)行機構(gòu)效能,是設計直接分配法中最常見的依據(jù),文獻[41,73,77]均以動壓作為標準,設計控制分配規(guī)則。 文獻[41]根據(jù)實際的飛行包線和任務需求確定了動壓分界面,提出了五段控制模式,并詳細規(guī)定了每段控制模式的執(zhí)行機構(gòu)。 文獻[73]采用并行工作結(jié)構(gòu),基于神經(jīng)網(wǎng)絡滑模控制方法設計復合控制器,然后,根據(jù)動壓實時分配氣動舵與發(fā)動機需要提供的控制力矩。 文獻[77]以動壓為依據(jù)設計了直接側(cè)向力控制向氣動力控制的過渡函數(shù)的權(quán)重系數(shù)。 文獻[78]以鏈式遞增分配策略分配力矩,配合二次規(guī)劃的氣動面和整數(shù)線性規(guī)劃的RCS,以求減小執(zhí)行機構(gòu)的能量消耗。 文獻[39]基于自適應遺傳算法設計了控制分配策略。 文獻[79]在考慮位置和速度約束的情況下,基于線性規(guī)劃設計了一種優(yōu)化控制分配方法,將控制指令分配給各執(zhí)行機構(gòu)。
b. 動態(tài)控制分配
文獻[44,80-81]中指出,多數(shù)研究的控制分配策略屬于靜態(tài)分配,其本質(zhì)是一個開環(huán)系統(tǒng),沒有考慮不同執(zhí)行機構(gòu)作用到被控對象后的動態(tài)特性差異。 因此,動態(tài)控制分配在靜態(tài)控制分配的基礎上引入過載偏差、旋轉(zhuǎn)角速度等狀態(tài)及系統(tǒng)動態(tài)特性考慮,實現(xiàn)系統(tǒng)閉環(huán)。 相較于靜態(tài)控制分配,基于動態(tài)控制分配的直/氣復合控制系統(tǒng)性能更優(yōu),但動態(tài)控制分配過程計算量更大,測試狀態(tài)量更多,測量精度要求更高,工程應用中難以實現(xiàn)。
文獻[82]針對執(zhí)行機構(gòu)動態(tài)特性變化問題,采用模糊自適應分配方法設計了控制分配策略。 文獻[34]基于被約束的二次型規(guī)劃的動態(tài)控制分配方法,將控制力矩分配給氣動力和直接側(cè)向力執(zhí)行機構(gòu)。 文獻[33]基于并行工作結(jié)構(gòu)設計復合控制系統(tǒng),采用固定時間滑模控制方法設計復合控制器,基于二次規(guī)劃的動態(tài)最優(yōu)方法設計控制分配策略。 該方法在分配過程中考慮了執(zhí)行機構(gòu)的動態(tài)響應,以求得到更精確的分配結(jié)果。 文獻[80]基于約束二次規(guī)劃設計了一種基于當前時刻控制需求和前一采樣時刻控制輸入的動態(tài)控制分配方法。
4.3 脈沖發(fā)動機點火算法
脈沖發(fā)動機的位置受到彈體結(jié)構(gòu)和安裝工藝的限制,只能提供特定方向的直接力,在控制受限的情況下設計點火算法,盡可能實現(xiàn)需用控制力,是直接力控制的難點和核心之一。 點火算法的優(yōu)劣直接影響直接力的控制效果,決定了被控對象的機動性、快速性和精確度。
脈沖發(fā)動機的點火算法需要依據(jù)點火噴口的分布設計,如圖3~4所示,脈沖發(fā)動機的安裝方案可分為兩種:均勻分布一圈或數(shù)圈安裝脈沖發(fā)動機,多用于旋轉(zhuǎn)的軸對稱被控對象,如旋轉(zhuǎn)導彈;針對俯仰、偏航、滾轉(zhuǎn)三通道控制分別安裝脈沖發(fā)動機,適用于三通道可以解耦設計的被控對象。 脈沖發(fā)動機由于其位置限制,不能提供任意方向的直接力。 因此,需要設計點火算法,規(guī)劃脈沖發(fā)動機的點火噴口,盡可能精確地實現(xiàn)控制指令要求的直接力;同時,減少脈沖發(fā)動機的消耗,避免抖振、反噴等問題。
設計點火算法前,首先需要根據(jù)攔截器的控制方式及脈沖發(fā)動機的分布確定適合的點火方式。 從原理看,脈沖發(fā)動機點火方式主要有區(qū)域點火和推力矢量合成點火兩種。
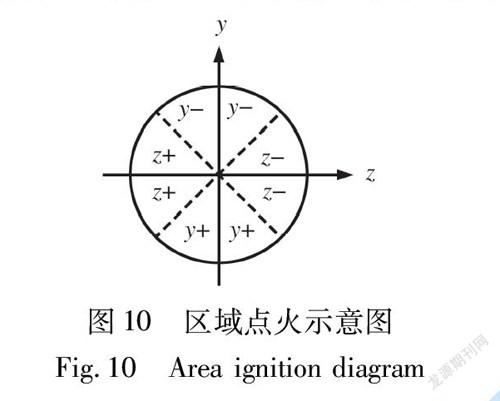
(1) 區(qū)域點火
區(qū)域控制發(fā)動機點火如圖10所示,位于y-和y+位置的發(fā)動機控制被控對象的縱向/俯仰通道機動,位于z-和z+位置的發(fā)動機控制被控對象的側(cè)向/偏航通道機動。 發(fā)動機點火后提供相反方向的推力,所以,點燃上方的位于y-方向的發(fā)動機,可以提供y軸負向的直接力。 其余區(qū)域同理。 此外,由于脈沖發(fā)動機安裝位置限制和被控對象的滾轉(zhuǎn)運動,脈沖發(fā)動機提供的直接力實際方向很難與期望方向完全重合,偏差部分一般視為干擾。
文獻[83-84]基于區(qū)域點火方式設計了點火算法。 文獻[83]將俯仰和偏航通道解耦,在彈頭配置兩組共四臺姿控發(fā)動機,分別控制俯仰通道和偏航通道。 文獻[84]每圈安裝18個姿控脈沖發(fā)動機,分為正、負俯仰和正、負偏航四個控制區(qū)。
區(qū)域點火方式計算簡單,但沒有考慮通道間的耦合,容易造成脈沖發(fā)動機的浪費。 基于其特性,區(qū)域點火適用于滾轉(zhuǎn)通道運動較小,即各通道耦合不嚴重的被控對象。
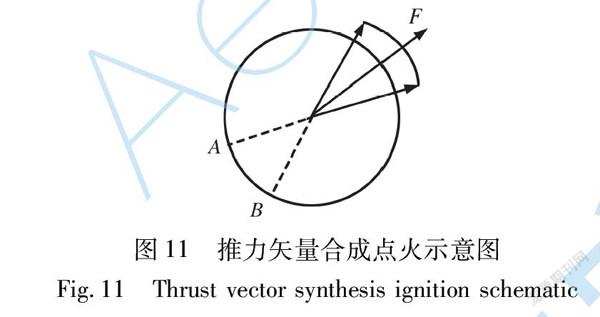
(2) 推力矢量合成點火
在脈沖發(fā)動機工作的一個周期內(nèi),若被控對象存在滾轉(zhuǎn)運動,則直接力掃過一個扇形區(qū)域,最終提供一個矢量合成力,如圖11所示。 當工作的脈沖發(fā)動機隨著被控對象的旋轉(zhuǎn)由A點運動到B點,最終得到合成的直接力F,F(xiàn)的方向在A,B兩點提供的直接力間,F(xiàn)的大小根據(jù)矢量合成原理計算。 同時啟動多個位置的脈沖發(fā)動機也是同理。 按照矢量合成的原理即可計算最終作用的直接力;反之,可通過最終期望獲得的直接力,反向計算點火脈沖發(fā)動機的位置和數(shù)量。
文獻[28,85-89]基于推力矢量合成點火方式設計了點火算法。 基于推力矢量點火方式的點火算法有三種設計思路:根據(jù)脈沖發(fā)動機安裝位置與需用直接力的幾何關系[28, 85-87];控制被控對象滾轉(zhuǎn)通道[88];利用優(yōu)化算法[89]。 文獻[85]建立了簡化的脈沖發(fā)動機的數(shù)學模型,根據(jù)數(shù)學模型及各通道需用直接力的幾何關系,設計了一種基于單純形的點火算法。 文獻[28]在旋轉(zhuǎn)導彈頭部安裝了10圈脈沖發(fā)動機,每圈均勻分布16個姿控脈沖發(fā)動機,根據(jù)所需直接力的方向就近選擇一個脈沖發(fā)動機點火。 文獻[86]基于極坐標的形式設計點火算法,并規(guī)定了姿控脈沖發(fā)動機的啟動順序:按照距離質(zhì)心的遠近,從遠到近使用。 文獻[87]通過單個點火或組合點火脈沖發(fā)動機產(chǎn)生直接力,設計了脈沖發(fā)動機點火個數(shù)確定及點火序號選擇策略。 文獻[88]優(yōu)化了彈體滾轉(zhuǎn)角速度,基于直接力的動態(tài)響應設計了滾轉(zhuǎn)扇掃點火偏差補償算法。 文獻[89]將點火算法轉(zhuǎn)化為0-1規(guī)劃問題,基于貪心算法對該問題進行了快速近似求解。 為了在確保精度的前提下減少脈沖發(fā)動機的消耗,基于幾何關系設計點火算法的方式具有計算量小且不需要控制被控對象滾轉(zhuǎn)通道的優(yōu)勢,在工程應用中最為廣泛。
雖然不可避免地存在期望控制力與實際控制力方向的偏差,但相較于區(qū)域點火,推力矢量合成點火的控制力方向準確度更高,對脈沖發(fā)動機造成的浪費更小,但要求脈沖發(fā)動機以一圈或數(shù)圈的形式均勻分布,每圈分布的脈沖發(fā)動機噴口越多,提供的控制力方向越準確。 考慮到單個脈沖發(fā)動機無法重復使用的特性,推力矢量合成點火一般用于軸對稱的滾轉(zhuǎn)被控對象,在滾轉(zhuǎn)過程中脈沖發(fā)動機相對空間方向一直變化,避免了由于發(fā)動機耗盡無法提供特定方向直接力的問題。
5 直/氣復合控制的展望
直/氣復合控制主要應用于對飛行器性能、命中精度、響應速度等要求較高的情況,面臨著異類執(zhí)行機構(gòu)組合導致的模型復雜、大氣環(huán)境稠密變化大導致的飛行階段復雜、執(zhí)行機構(gòu)控制受限嚴重等問題,給其制導控制系統(tǒng)設計帶來了困難和挑戰(zhàn)。 為了在實際工程問題下發(fā)揮直/氣復合控制的最大性能,為相關工程應用提供理論指導,基于現(xiàn)有的研究現(xiàn)狀,仍有以下問題等待完善:
(1) 多輸入混合異構(gòu)控制系統(tǒng)建模
由于直接力、氣動力控制量特性不同,直/氣復合控制系統(tǒng)本質(zhì)上是一種多輸入混合異構(gòu)控制系統(tǒng),多控制量之間的協(xié)調(diào)直接影響復合控制系統(tǒng)性能。 現(xiàn)有研究為了便于設計,采用分別設計直接力控制系統(tǒng)、氣動力控制系統(tǒng)的策略,再依據(jù)規(guī)則或優(yōu)化策略將二者組合。 這種方法沒有將多執(zhí)行機構(gòu)復合系統(tǒng)視為統(tǒng)一的多輸入系統(tǒng),導致異類控制量配合時存在一定的損耗,不能實現(xiàn)復合控制的最大性能,且忽略了執(zhí)行機構(gòu)間的相互作用,對復合控制的多輸入特性缺乏理論分析和深入研究。
直/氣復合控制系統(tǒng)的多輸入控制量形式與執(zhí)行機構(gòu)配置緊密相關。 為發(fā)揮多執(zhí)行機構(gòu)協(xié)調(diào)的最大性能,考慮將直/氣復合控制系統(tǒng)視為多輸入系統(tǒng)進行設計研究;另一方面,多輸入復合控制系統(tǒng)設計方法具有較強的泛用性,可以在統(tǒng)一的控制框架下結(jié)合具體的執(zhí)行機構(gòu)配置方案實現(xiàn)復合控制,更便于工程應用。
(2) 直/氣復合控制穩(wěn)定性分析
異構(gòu)執(zhí)行機構(gòu)導致了連續(xù)/離散耦合問題,現(xiàn)有研究在直/氣復合控制模型中考慮了氣動力的連續(xù)特性和直接力的離散特性,但在穩(wěn)定性分析方面尚缺乏相關研究。 后續(xù)研究中,可以考慮在選取穩(wěn)定性分析的李雅普諾夫函數(shù)時將連續(xù)控制量與離散控制量相結(jié)合。
(3) 直/氣復合控制系統(tǒng)容錯
直接力執(zhí)行機構(gòu)配置方式靈活多樣,且其工作特性與氣動舵有較大差異。 現(xiàn)有容錯方法大多基于傳統(tǒng)的氣動控制設計,對于直/氣復合控制,尤其是直接力控制的容錯方法關注較少。
后續(xù)研究中可以考慮設計點火算法容錯策略,在有脈沖發(fā)動機故障的情況下,通過調(diào)整點火脈沖發(fā)動機噴口位置或推力大小,靈活地補償故障脈沖發(fā)動機應提供的直接力。
(4) 直/氣復合系統(tǒng)制導控制一體化
直接力的作動器脈沖發(fā)動機由于安裝位置不同,存在力矩控制和力控制兩種工作形式,其中,力控制可以為被控對象提供加速度,效果直接作用于其飛行彈道,造成制導控制系統(tǒng)的耦合。 傳統(tǒng)的制導控制系統(tǒng)設計通常采用分別設計制導系統(tǒng)和控制系統(tǒng)的方式,令控制系統(tǒng)跟蹤制導系統(tǒng)生成制導指令,使控制系統(tǒng)嵌入到制導系統(tǒng)中。 制導控制一體化設計方法作為傳統(tǒng)方法的改進和替代,不再區(qū)分制導系統(tǒng)或控制系統(tǒng),而是將其作為一個整體考慮,根據(jù)測量信息與被控對象本身的狀態(tài)直接產(chǎn)生控制指令,減少制導控制系統(tǒng)耦合造成的控制偏差,在兼顧傳統(tǒng)制導控制系統(tǒng)性能的同時,提高整體的制導品質(zhì),具有更快的響應速度和更高的命中精度,能夠進一步增強直/氣復合控制系統(tǒng)的機動性和快速性。 然而,一體化設計通常面臨著系統(tǒng)階數(shù)較高的問題,其在直/氣復合制導控制方面的應用還有待后續(xù)的深入探索。
(5) 直/氣復合控制系統(tǒng)的能量控制
氣動舵本質(zhì)上屬于舵機,提供連續(xù)的控制量,且不需要消耗燃料;直接力執(zhí)行機構(gòu)本質(zhì)屬于發(fā)動機,需要通過燃燒燃料獲得直接推力。 因此,在使用直接力時需要考慮能量控制問題,即如何在消耗盡可能少的燃料的情況下完成控制任務。
現(xiàn)有直/氣復合控制領域的研究在能量控制方面的成果較少且缺乏系統(tǒng)性,未來可以考慮從執(zhí)行機構(gòu)選擇策略、執(zhí)行機構(gòu)配置優(yōu)化、直/氣復合控制系統(tǒng)的智能化能量控制等方面入手,研究直/氣復合控制系統(tǒng)的能量控制方法,提高燃料的利用效率。 另外,需用燃料的多少是評估直/氣復合控制系統(tǒng)效能的重要指標,在工程應用中備受關注,后續(xù)研究可以基于能量控制提出直/氣復合控制系統(tǒng)的評估指標,為工程實踐中的執(zhí)行機構(gòu)配置提供理論指導。
除此之外,直接力控制的典型執(zhí)行機構(gòu)脈沖發(fā)動機在開關狀態(tài)切換時可能引起抖振,導致能量的浪費,在后續(xù)研究中可以考慮對此進行針對性的優(yōu)化。
6 總? 結(jié)
相對于傳統(tǒng)的純氣動控制系統(tǒng),直/氣復合控制系統(tǒng)能夠顯著提升被控對象的機動性和快速性,多用于對系統(tǒng)響應速度、機動能力有較高要求的應用場景中。 然而,直/氣復合控制系統(tǒng)屬于包含多輸入的混合異構(gòu)執(zhí)行機構(gòu)組合系統(tǒng),導致其在建模、制導控制方法、穩(wěn)定性分析等方面都存在一定的困難。
在對直/氣復合控制方式及執(zhí)行機構(gòu)進行概述的基礎上,對直/氣復合系統(tǒng)國內(nèi)外研究現(xiàn)狀進行了綜述,并分析了直/氣復合系統(tǒng)中的關鍵技術,可得到結(jié)論如下:
(1) 在直/氣復合控制系統(tǒng)建模中將直接力簡化為連續(xù)控制量,便于在控制系統(tǒng)中使用各種復雜控制方法,但這種假設在工程應用中存在較大限制,無法實現(xiàn)。 若盡可能在直/氣復合系統(tǒng)建模中體現(xiàn)直接力的工作特性,則給后續(xù)設計帶來了極大的挑戰(zhàn)。
(2) 采用控制量并行模式可以將復合控制系統(tǒng)分為復合控制器和控制分配兩部分獨立進行設計,具有泛用性強、設計靈活的優(yōu)勢,是現(xiàn)有研究中最常用的模式。 并行模式下控制器設計與一般的純氣動控制系統(tǒng)相同,而根據(jù)被控對象的作動器特點、使用環(huán)境、計算能力、任務需求等設計的控制分配策略則是此模式的核心,直接影響最終的控制效果。
(3) 脈沖發(fā)動機作為應用最廣泛的直接力執(zhí)行機構(gòu),具有工作時間受限、推力大小受限、安裝位置受限、數(shù)量有限等控制受限問題。 結(jié)合上述控制受限問題以及脈沖發(fā)動機啟控方式,基于需用直接力方向和脈沖發(fā)動機幾何關系、控制滾轉(zhuǎn)通道、利用優(yōu)化算法來設計點火算法。
參考文獻:
[1] Hong J H, Lee C H. Nonlinear Autopilot Design for Endo-and Exoatmospheric Interceptor with Thrust Vector Control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 796-810.
[2] Kim S, Cho D, Kim H J. Force and Moment Blending Control for Fast Response of Agile Dual Missiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(2): 938-947.
[3] Yeh F K, Cheng K Y, Fu L C. Variable Structure-Based Nonlinear Missile Guidance/Autopilot Design with Highly Maneuverable Actua-tors[J]. IEEE Transactions on Control Systems Technology, 2004, 12(6): 944-949.
[4] Hahn P V, Frederick R A, Slegers N. Predictive Guidance of a Projectile for Hit-to-Kill Interception[J]. IEEE Transactions on Control Systems Technology, 2009, 17(4): 745-755.
[5] 沈昭烈, 吳震. 空空導彈推力矢量控制系統(tǒng)[J]. 戰(zhàn)術導彈控制技術, 2002(2): 1-6.
Shen Zhaolie, Wu Zhen. Air-to-Air Missile Thrust Vector Control System[J]. Tactical Missile Control Technology, 2002(2): 1-6. (in Chinese)
[6] Na H, Lee J I. Optimal Arrangement of Missile Defense Systems Considering Kill Probability[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 972-983.
[7] 陳海建. 先進防空導彈關鍵技術分析及發(fā)展啟示[J]. 現(xiàn)代防御技術, 2020, 48(4): 60-66.
Chen Haijian. Key Technology Analysis and Development Enligh-tenment of Advanced Air Defense Missile[J]. Modern Defence Technology, 2020, 48(4): 60-66.(in Chinese)
[8] 劉野, 袁欣, 張蕾. 美國多方位防御-快速攔截彈交戰(zhàn)系統(tǒng)發(fā)展情況分析[J]. 飛航導彈, 2020(3): 1-4.
Liu Ye, Yuan Xin, Zhang Lei. Development Analysis of the U S? Multi-Directional Defense-Rapid Interceptor Engagement System [J]. Aerodynamic Missile Journal, 2020(3): 1-4.(in Chinese)
[9] Zhang Y A, Wu H L, Liu J M, et al. A Blended Control Strategy for Intercepting High-Speed Target in High Altitude[J].? Journal of Aerospace Engineering, 2018, 232(12): 2263-2285.
[10] Yeh F K. Adaptive-Sliding-Mode Guidance Law Design for Missiles with Thrust Vector Control and Divert Control System[J]. IET Control Theory & Applications, 2012, 6(4): 552.
[11] Yeh F K, Chien H H, Fu L C. Design of Optimal Midcourse Guidance Sliding-Mode Control for Missiles with TVC[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 824-837.
[12] 李權(quán). 導彈直接側(cè)向力與氣動力復合控制系統(tǒng)分析與設計方法[D]. 哈爾濱: 哈爾濱工業(yè)大學, 2014.
Li Quan. Performance Analysis and Autopilot Design for a Missile with Blended Lateral Thrust and Aerodynamic Force[D]. Harbin: Harbin Institute of Technology, 2014. (in Chinese)
[13] 李玉林, 楊樹興. 先進防空導彈直接力/氣動力復合控制關鍵技術分析[J]. 兵工學報, 2007, 28(12): 1523-1527.
Li Yulin, Yang Shuxing. Key Technology Analysis of Blended Control Caused by Lateral/Aerodynamic Forces for Air Defense Missile[J]. Acta Armamentarii, 2007, 28(12): 1523-1527. (in Chinese)
[14] 徐敏. 大氣層內(nèi)攔截彈側(cè)向噴流控制技術研究[D]. 西安: 西北工業(yè)大學, 2003.
Xu Min. Studies of Lateral Jet Control on Endoatmospheric Interceptor[D]. Xi’an: Northwestern Polytechnical University, 2003. (in Chinese)
[15] Liu L J, Zhu C H, Yu Z, et al. Guidance and Ignition Control of Lateral-Jet-Controlled Interceptor Missiles[J]. Journal of Gui-dance, Control, and Dynamics, 2015, 38(12): 2455-2460.
[16] Choi K, Lee S, Oh K, et al. Numerical Investigation of Jet Interactions for a Lateral Thrust Jet Controlled Interceptor Operating at Medium Altitudes[J]. International Journal of Aeronautical and Space Sciences, 2020, 21(1): 39-49.
[17] 廖新華. 美利堅神箭——愛國者PAC-3反導攔截系統(tǒng)終極報告[J]. 國際展望, 2006(18): 28-35.
Liao Xinhua. America’s Arrow: Patriot PAC-3 Anti-Missile Interceptor System Final Report [J]. World Outlook, 2006(18): 28-35.(in Chinese)
[18] 雍恩米, 趙良玉, 趙暾. 薩德導彈攔截防御作戰(zhàn)彈道設計與仿真分析[J]. 空天防御, 2020, 3(2): 65-71.
Yong Enmi, Zhao Liangyu, Zhao Tun. Design and Simulation of THAAD Missile Defence Trajectory[J]. Air & Space Defense, 2020, 3(2): 65-71.(in Chinese)
[19] 特日格樂, 王楠楠, 姚源, 等. 美國X-37B發(fā)展情況簡析[J]. 中國航天, 2020(4): 37-40.
Terigele, Wang Nannan, Yao Yuan, et al. A Review on US Air Force X-37B Vehicle[J]. Aerospace China, 2020(4): 37-40.(in Chinese)
[20] 孫宗祥, 唐志共, 陳喜蘭, 等. X-37B的發(fā)展現(xiàn)狀及空氣動力技術綜述[J]. 實驗流體力學, 2015, 29(1): 1-14.
Sun Zongxiang, Tang Zhigong, Chen Xilan, et al. Review of the State-of-Art and Aerodynamic Technology of X-37B[J]. Journal of Experiments in Fluid Mechanics, 2015, 29(1): 1-14.(in Chinese)
[21] 李欣. 國際第四代中程防空導彈特性分析[J]. 中國新技術新產(chǎn)品, 2019(6): 15-16.
Li Xin. Characterization of International Fourth-Generation Me-dium-Range Air Defense Missiles [J]. New Technology & New Products of China, 2019(6): 15-16.(in Chinese)
[22] 梁棟, 宋建梅, 蔡高華. 高速飛行器直接力/氣動力復合控制技術綜述[J]. 航空兵器, 2013(4): 15-19.
Liang Dong, Song Jianmei, Cai Gaohua. Survey of Compound Control Methods of Reaction Thrust and Aerodynamic Fin of Flight Vehicle[J]. Aero Weaponry, 2013(4): 15-19.(in Chinese)
[23] 肖科, 雷虎民, 張維剛, 等. 防空導彈直接側(cè)向力與氣動力復合控制技術綜述[J]. 飛航導彈, 2013(1): 72-77.
Xiao Ke, Lei Humin, Zhang Weigang, et al. Review of Composite Control Technology of Air Defense Missile Direct Lateral Force and Aerodynamic Force [J]. Aerodynamic Missile Journal, 2013(1): 72-77.(in Chinese)
[24] Aydin A T. Orbit Selection and EKV Guidance for Space-Based ICBM Intercept[EB/OL]. (2005-09-01)[2021-07-12]. https:∥core.ac.uk/download/pdf/36695751.pdf.
[25] 紀彥宇. 直/氣復合控制攔截彈控制策略研究[D]. 哈爾濱: 哈爾濱工業(yè)大學, 2018.
Ji Yanyu. Research on Control & Strategy Method of Side-Jet & Aerodynamic Fins Compound of Interceptor Missile[D]. Harbin: Harbin Institute of Technology, 2018. (in Chinese)
[26] 戰(zhàn)略前沿技術. 空空導彈技術未來發(fā)展方向展望[EB/OL].(2021-06-29)[2021-07-12]. https:∥mp.weixin.qq.com/s/ 3EgVGSoX09qAUqYeN7 EP0A.
Strategic Frontier Technology. Future Development of Air-to-Air Missile Technology[EB/OL]. (2021-06-29)[2021-07-12]. https:∥ mp.weixin.qq.com/s/3EgVGSoX09qAUqYeN7 EP0A.(in Chinese)
[27] 劉海霞. 法意聯(lián)合研制系列化防空導彈[J]. 中國航天, 2001(3): 32-34.
Liu Haixia. France and Italy Jointly Develop Series of Air Defense Missiles [J]. Aerospace China, 2001(3): 32-34.(in Chinese)
[28] 鄒勇, 劉鈞圣, 馬駿, 等. 基于脈沖推力/氣動力復合控制的高速動能導彈控制方法研究[J]. 彈箭與制導學報, 2019, 39(1): 65-68.
Zou Yong, Liu Junsheng, Ma Jun, et al. Compound Control with Pulse Thrust and Aerodynamic Force for Kinetic Energy Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2019, 39(1): 65-68.(in Chinese)
[29] 邵春濤, 周荻. 大氣層內(nèi)攔截彈采樣系統(tǒng)H∞混合靈敏度設計[J]. 系統(tǒng)工程與電子技術, 2009, 31(5): 1138-1141.
Shao Chuntao, Zhou Di. H-Infinity Mixed Sensitivity Design for Sampled-Data System of Endoatmospheric Interceptors[J]. Systems Engineering and Electronics, 2009, 31(5): 1138-1141.(in Chinese)
[30] Weil R D, Wise K A. Blended Aero and Reaction Jet Missile Autopilot Design Using VSS Techniques[C]∥30th IEEE Conference on Decision and Control, 1991: 2828-2829.
[31] Wise K A, Roy D J B. Agile Missile Dynamics and Control[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(3): 441-449.
[32] Innocenti M, Thukral A. Simultaneous Reaction Jet and Aerodynamic Control of Missile Systems[C]∥Guidance, Navigation and Control Conference, 1993.
[33] 劉祥, 李愛軍, 郭永, 等. 固定時間收斂的空空導彈直接力/氣動力復合控制[J]. 哈爾濱工業(yè)大學學報, 2019, 51(9): 29-34.
Liu Xiang, Li Aijun, Guo Yong, et al. Fixed-Time Convergence Blended Control for Air-to-Air Missile with Lateral Thrusters and Aerodynamic Force[J]. Journal of Harbin Institute of Technology, 2019, 51(9): 29-34.(in Chinese)
[34] Guo Y, Guo J H, Liu X, et al. Finite-Time Blended Control for Air-to-Air Missile with Lateral Thrusters and Aerodynamic Surfaces[J]. Aerospace Science and Technology, 2020, 97: 105638.
[35] Zhou D, Shao C T. Dynamics and Autopilot Design for Endoatmospheric Interceptors with Dual Control Systems[J]. Aerospace Science and Technology, 2009, 13(6): 291-300.
[36] 郭建國, 張?zhí)肀#?周軍, 等. 可重復使用飛行器歸一化復合控制系統(tǒng)設計[J]. 宇航學報, 2016, 37(6): 639-645.
Guo Jianguo, Zhang Tianbao, Zhou Jun, et al. Compound Control System Design for RLV Based on Normalization Method[J]. Journal of Astronautics, 2016, 37(6): 639-645.(in Chinese)
[37] Thukral A, Innocenti M. A Sliding Mode Missile Pitch Autopilot Synthesis for High Angle of Attack Maneuvering[J]. IEEE Tran-sactions on Control Systems Technology, 1998, 6(3): 359-371.
[38] 董朝陽, 王楓, 高曉穎, 等. 基于自適應滑模與模糊控制的導彈直接力/氣動力復合控制系統(tǒng)優(yōu)化設計[J]. 航空學報, 2008, 29(1): 165-169.
Dong Chaoyang, Wang Feng, Gao Xiaoying, et al. Missile Reaction-Jet/Aerodynamic Compound Control System Design Based on Adaptive Sliding Mode Control and Fuzzy Logic[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(1): 165-169.(in Chinese)
[39] 史震, 馬文橋, 王飛, 等. 直接力/氣動力復合控制導彈智能控制算法[J]. 南京理工大學學報, 2014, 38(4): 481-489.
Shi Zhen, Ma Wenqiao, Wang Fei, et al. Intelligent Control Algorithm for Missile with Lateral Jets and Aerodynamic Surfaces[J]. Journal of Nanjing University of Science and Technology, 2014, 38(4): 481-489.(in Chinese)
[40] 閆亮, 段朝陽, 張公平, 等. 一種采用脈沖調(diào)制器的空空導彈直/氣復合控制系統(tǒng)穩(wěn)定性研究[J]. 導航定位與授時, 2017, 4(1): 42-48.
Yan Liang, Duan Chaoyang, Zhang Gongping, et al. Research on the Stability of an Air-to-Air Missile Lateral Thrust and Aerodynamic Compound Control System with a Pulse Modulator[J]. Na-vigation Positioning and Timing, 2017, 4(1): 42-48.(in Chinese)
[41] 余光學, 程興, 耿光有. RLV雙環(huán)滑模RCS/氣動舵復合控制器設計[J]. 宇航總體技術, 2018, 2(6): 42-49.
Yu Guangxue, Cheng Xing, Geng Guangyou. A RLV Dual-Loop Sliding Mode RCS/Aerosurfaces Compound Controller Design[J]. Astronautical Systems Engineering Technology, 2018, 2(6): 42-49.(in Chinese)
[42] 金一歡, 馮昊, 林俊, 等. 基于自適應高階滑模的直氣復合控制律設計[J]. 空間控制技術與應用, 2020, 46(1): 31-36.
Jin Yihuan, Feng Hao, Lin Jun, et al. Adaptive Continuous Higher Order Sliding Mode Control for Dual Aero/Propulsive Missile[J]. Aerospace Control and Application, 2020, 46(1): 31-36.(in Chinese)
[43] 邵春濤, 周荻. 大氣層內(nèi)攔截彈脈沖發(fā)動機消耗量離線計算[J]. 航天控制, 2009, 27(4): 57-61.
Shao Chuntao, Zhou Di. Off-Line Calculation for Consumed Impulse Thrusters of Endoatmospheric Interceptors[J]. Aerospace Control, 2009, 27(4): 57-61.(in Chinese)
[44] 楊寶慶, 馬杰, 姚郁, 等. 基于預測控制的直接側(cè)向力氣動力復合控制方法研究[J]. 系統(tǒng)科學與數(shù)學, 2010, 30(6): 816-826.
Yang Baoqing, Ma Jie, Yao Yu, et al. Blended Control Method with Lateral Thrust and Aerodynamic Force Based on Predictive Control[J]. Journal of Systems Science and Mathematical Sciences, 2010, 30(6): 816-826.(in Chinese)
[45] 馬克茂, 趙輝, 張德成. 導彈直接側(cè)向力與氣動力復合控制設計與實現(xiàn)[J]. 宇航學報, 2011, 32(2): 310-316.
Ma Kemao, Zhao Hui, Zhang Decheng. Control Design and Implementation for Missiles with Blended Lateral Jets and Aerodynamic Control Systems[J]. Journal of Astronautics, 2011, 32(2): 310-316.(in Chinese)
[46] Ashrafiuon H. Guidance and Attitude Control of Unstable Rigid Bodies with Single-Use Thrusters[J]. IEEE Transactions on Control Systems Technology, 2017, 25(2): 401-413.
[47] 趙明元, 魏明英, 何秋茹. 基于有限時間穩(wěn)定和Backstepping的直接力/氣動力復合控制方法[J]. 宇航學報, 2010, 31(9): 2157-2164.
Zhao Mingyuan, Wei Mingying, He Qiuru. Research on Method of Lateral Jet and Aerodynamic Fins Compound Control Based on Finite Time Stability and Backstepping Approach[J]. Journal of Astronautics, 2010, 31(9): 2157-2164.(in Chinese)
[48] 姚郁, 畢永濤. 姿控式直接側(cè)向力與氣動力復合控制策略設計[J]. 航空學報, 2010, 31(4): 701-708.
Yao Yu, Bi Yongtao. Design of Blended Control Strategy for Missiles with Lateral Jets and Aerodynamic Surfaces[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(4): 701-708.(in Chinese)
[49] 馬克茂, 趙輝. 一類多執(zhí)行機構(gòu)系統(tǒng)的滑模控制設計及其應用[J]. 控制理論與應用, 2011, 28(4): 556-560.
Ma Kemao, Zhao Hui. Sliding Modes Control Design for a Class of Systems with Multiple Actuators and Its Applications[J]. Control Theory & Applications, 2011, 28(4): 556-560.(in Chinese)
[50] 周荻, 邵春濤. 大氣層內(nèi)攔截彈直接側(cè)向力/氣動力混合控制系統(tǒng)設計[J]. 宇航學報, 2007, 28(5): 1205-1209.
Zhou Di, Shao Chuntao. Hybrid Control System Design for an Atmospheric Interceptor Controlled by Lateral Jet Thrusters and Aerodynamic Surfaces[J]. Journal of Astronautics, 2007, 28(5): 1205-1209.(in Chinese)
[51] 楊彥廣. 高超聲速主流中的橫向噴流干擾效應研究[D]. 綿陽: 中國空氣動力研究與發(fā)展中心, 2003.
Yang Yanguang. Study of Transverse Jet Interference Effects in the Hypersonic Mainstream[D]. Mianyang: China Aerodynamics Research and Development Center, 2003. (in Chinese)
[52] 劉君, 楊彥廣. 帶有橫噴控制的導彈非定常流場數(shù)值模擬[J]. 空氣動力學學報, 2005, 23(1): 25-28.
Liu Jun, Yang Yanguang. Numerical Simulation of Lateral Jet Control Induced by Impulse Rocket Motor for a Supersonic Missile[J]. Acta Aerodynamica Sinica, 2005, 23(1): 25-28.(in Chinese)
[53] 白濤濤, 曹軍偉, 王虎干, 等. 有/無尾噴流效應影響的導彈側(cè)向噴流干擾數(shù)值研究[J]. 航空兵器, 2020, 27(3): 83-87.
Bai Taotao, Cao Junwei, Wang Hugan, et al. Numerical Investigation on Interactions of Lateral Jet with/without Plume for Missiles[J]. Aero Weaponry, 2020, 27(3): 83-87.(in Chinese)
[54] 張友安, 吳華麗, 梁勇. 考慮復合控制系統(tǒng)動態(tài)特性的前向攔截制導律[J]. 宇航學報, 2015, 36(2): 158-164.
Zhang You’an, Wu Huali, Liang Yong. Head Pursuit Guidance Law Considering Dynamic Characteristic of Hybrid Control System[J]. Journal of Astronautics, 2015, 36(2): 158-164.(in Chinese)
[55] 李陟, 魏明英, 周荻. 防空導彈直接側(cè)向力/氣動力復合控制技術[M]. 北京: 中國宇航出版社, 2012.
Li Zhi, Wei Mingying, Zhou Di. Direct Lateral Force/Aerodynamic Composite Control Technology for Air Defense Missile [M]. Beijing: China Aerospace Publishing House, 2012.(in Chinese)
[56] 何文敏, 李實, 向崢嶸. 切換非線性系統(tǒng)采樣控制的研究現(xiàn)狀與進展[J]. 信息與控制, 2020, 49(2): 129-138.
He Wenmin, Li Shi, Xiang Zhengrong. Research Status and Progress in Sampled-Data Control for Switched Nonlinear Systems[J]. Information and Control, 2020, 49(2): 129-138.(in Chinese)
[57] Liberzon D, Tempo R. Common Lyapunov Functions and Gradient Algorithms[J]. IEEE Transactions on Automatic Control, 2004, 49(6): 990-994.
[58] Peleties P, DeCarlo R. Asymptotic Stability of M-Switched Systems Using Lyapunov-Like Functions[C]∥American Control Conference, 1991.
[59] Hespanha J P, Morse A S. Stability of Switched Systems with Ave-rage Dwell-Time[C]∥38th IEEE Conference on Decision and Control,1999.
[60] Morse A S. Supervisory Control of Families of Linear Set-Point Controllers[J].IEEE Transactions on Automatic Control,1997: 1500-1515.
[61] Zong G D, Wu Y Q. Exponential Stability of a Class of Switched and Hybrid Systems[C]∥ 8th Control, Automation, Robotics and Vision Conference, 2004.
[62] 凡國龍, 梁曉庚, 楊軍. 直接側(cè)向力/氣動力復合控制系統(tǒng)穩(wěn)定性分析[J]. 計算機仿真, 2011, 28(6): 96-100.
Fan Guolong, Liang Xiaogeng, Yang Jun. Stability Analysis of Reaction-Lateral-Jet / Aerodynamic Complex Control System[J]. Computer Simulation, 2011, 28(6): 96-100.(in Chinese)
[63] 管再升, 阮文華, 劉偉, 等. 軌控推力矢量技術在防空導彈上的應用研究[J]. 空天防御, 2020, 3(2): 1-7.
Guan Zaisheng, Ruan Wenhua, Liu Wei, et al. Study of Trajectory-Controlled Thrust Vector Technology Application in Air Defense Missile[J]. Air & Space Defense, 2020, 3(2): 1-7.(in Chinese)
[64] Lin I F, Huang C I, Fu L C. Flight Controller Design for Intercepting Missiles with Multiple TVC Systems and DCS[C]∥American Control Conference, 2007.
[65] Ridgely D, Drake D, Triplett L, et al. Dynamic Control Allocation of a Missile with Tails and Reaction Jets[C]∥AIAA Gui-dance, Navigation and Control Conference and Exhibit, 2007.
[66] 董添, 趙長見, 宋志國. 直接力/氣動力復合控制系統(tǒng)設計方法研究[J]. 導彈與航天運載技術, 2019(3): 58-62.
Dong Tian, Zhao Changjian, Song Zhiguo. A Survey on Compound Control System Design for Aircraft with Lateral Thrusters and Aerodynamic Fins[J]. Missiles and Space Vehicles, 2019(3): 58-62.(in Chinese)
[67] 胥彪, 周荻. 受輸入飽和約束的導彈直接側(cè)向力/氣動力復合控制[J]. 宇航學報, 2012, 33(11): 1630-1635.
Xu Biao, Zhou Di. Dual Aero/Propulsive Missile Control Subject to Input Saturation[J]. Journal of Astronautics, 2012, 33(11): 1630-1635.(in Chinese)
[68] 劉凱, 宋曉娜, 劉躍敏. 導彈復合控制系統(tǒng)的切換控制器設計[J]. 電光與控制, 2017, 24(7): 33-36.
Liu Kai, Song Xiaona, Liu Yuemin. Switching Controller Design for Missile Compound Control System[J]. Electronics Optics & Control, 2017, 24(7): 33-36.(in Chinese)
[69] 王宏利. 導彈復合控制系統(tǒng)切換控制方法[D]. 哈爾濱: 哈爾濱工業(yè)大學, 2010.
Wang Hongli. Switching Control for Blended Controled Missiles[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese)
[70] 周銳, 高曉穎. 導彈復合控制系統(tǒng)的多目標優(yōu)化設計[J]. 航天控制, 2007, 25(2): 9-12.
Zhou Rui, Gao Xiaoying. Blended Control System Design of Missile with Aerodynamic Fin and Side Thruster Using Multi-Objective Optimization[J]. Aerospace Control, 2007, 25(2): 9-12.(in Chinese)
[71] Hirokawa R, Sato K, Manabe S. Autopilot Design for a Missile with Reaction-Jet Using Coefficient Diagram Method[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
[72] Johansen T A, Fossen T I. Control Allocation-A Survey[J]. Automatica, 2013, 49(5): 1087-1103.
[73] 李愛軍, 王瑜, 郭永, 等. 空天飛行器姿態(tài)直接力/氣動力復合控制[J]. 西北工業(yè)大學學報, 2019, 37(3): 532-540.
Li Aijun, Wang Yu, Guo Yong, et al. Attitude Blended Control for Aerospace Vehicle with Lateral Thrusters and Aerodynamic Fins[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 532-540.(in Chinese)
[74] Liu Y, Gao Z H, Shang C Y. Control Allocation for an Over-Actuated Aircraft Based on Within-Visual-Range Air Combat Agility[J]. IEEE Access, 2018, 6: 14668-14675.
[75] Yang P F, Fang Y W, Chai D, et al. Fuzzy Control Strategy for Hypersonic Missile Autopilot with Blended Aero-Fin and Lateral Thrust[J]. Journal of Systems and Control Engineering, 2016, 230(1): 72-81.
[76] Ridgely D, Drake D, Triplett L, et al. Dynamic Control Allocation of a Missile with Tails and Reaction Jets[C]∥AIAA Gui-dance, Navigation and Control Conference and Exhibit, 2007.
[77] 寧國棟, 張曙光, 方振平. 跨大氣層飛行器再入段RCS控制特性[J]. 飛行力學, 2005, 23(3): 16-20.
Ning Guodong, Zhang Shuguang, Fang Zhenping. Research on the Reaction Control System for Spacecraft Re-Entry Flight[J]. Flight Dynamics, 2005, 23(3): 16-20.(in Chinese)
[78] 賀成龍, 陳欣, 楊一棟. 一種動態(tài)逆解算的RLV混合規(guī)劃控制分配研究[J]. 系統(tǒng)工程與電子技術, 2010, 32(9): 1973-1976.
He Chenglong, Chen Xin, Yang Yidong. Mixed Programming Control Allocation for Reusable Launch Vehicles Using Dynamic Inverse Calculating[J]. Systems Engineering and Electronics, 2010, 32(9): 1973-1976.(in Chinese)
[79] Zang X H, Tang S. Combined Feedback Linearization and Sliding Mode Control for Reusable Launch Vehicle Reentry[C]∥12th International Conference on Control Automation Robotics & Vision (ICARCV), 2012.
[80] Hrkegrd O. Dynamic Control Allocation Using Constrained Quadratic Programming[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(6): 1028-1034.
[81] Gai W D, Liu J, Zhang J, et al. A New Closed-Loop Control Allocation Method with Application to Direct Force Control[J]. International Journal of Control, Automation and Systems, 2018, 16(3): 1355-1366.
[82] 周銳, 王軍. 導彈氣動力/直接力自適應控制分配及優(yōu)化設計[J]. 航空學報, 2007, 28(1): 187-190.
Zhou Rui, Wang Jun. Adaptive Control Allocation between Aerodynamic Fin and Side Thruster and Controller Design Using Multi-Objective Optimization[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(1): 187-190.(in Chinese)
[83] 馬文橋. 直接力/氣動力復合控制導彈幾個問題研究[D]. 哈爾濱: 哈爾濱工程大學, 2014.
Ma Wenqiao. Investigations on Some Problems of Missile with La-teral Jet and Aerodynamic Surfaces[D]. Harbin: Harbin Engineering University, 2014. (in Chinese)
[84] 畢永濤. 直/氣復合控制導彈制導控制問題研究[D]. 哈爾濱: 哈爾濱工業(yè)大學, 2010.
Bi Yongtao. Research on Guidance and Control for Missile with Lateral Jets and Aerodynamic Surfaces[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese)
[85] 于喜河, 單家元, 劉藻珍. 基于脈沖推力控制的超高速動能導彈控制算法設計[J]. 戰(zhàn)術導彈控制技術, 2006(1): 14-17.
Yu Xihe, Shan Jiayuan, Liu Zaozhen. An Algorithm Design for Hyper-Velocity Kinetic Missile Based on Micro-Pulsed Propeller[J]. Tactical Missile Control Technology, 2006(1): 14-17. (in Chinese)
[86] 沈明輝, 陳磊, 吳瑞林, 等. 大氣層內(nèi)動能攔截彈脈沖矢量發(fā)動機點火控制算法研究[J]. 宇航學報, 2007, 28(2): 278-281.
Shen Minghui, Chen Lei, Wu Ruilin, et al. Investigation of Ignition Control Algorithm of the Pulse Vector Motors of the Endoatmospheric Kinetic Interceptor[J]. Journal of Astronautics, 2007, 28(2): 278-281.(in Chinese)
[87] 劉鵬云, 孫瑞勝, 李偉明. 復合控制火箭彈脈沖點火算法研究[J]. 彈道學報, 2012, 24(4): 27-30.
Liu Pengyun, Sun Ruisheng, Li Weiming. Algorithm Study on Impulse Ignition for Rocket with Compound Control[J]. Journal of Ballistics, 2012, 24(4): 27-30.(in Chinese)
[88] 董杰, 王法棟, 劉宗福. 大氣層內(nèi)動能攔截器微型脈沖發(fā)動機點火算法[J]. 導彈與航天運載技術, 2013(2): 46-49.
Dong Jie, Wang Fadong, Liu Zongfu. Ignition Algorithm of Micro Pulse Engines for the Endo-Atmosphere Kinetic Kill Vehicle[J]. Missiles and Space Vehicles, 2013(2): 46-49.(in Chinese)
[89] 楊銳, 徐敏, 陳士櫓. 動能攔截彈姿控發(fā)動機組合點火算法研究[J]. 西北工業(yè)大學學報, 2006, 24(1): 15-18.
Yang Rui, Xu Min, Chen Shilu. An Approximate but Fast Combined Ignition Algorithm for Attitude Control Thrusters System(ACTS) of Kinetic Interceptor(KI)[J]. Journal of Northwestern Polytechnical University, 2006, 24(1): 15-18.(in Chinese)
[HJ*3][HJ][JZ(]Review on Development of Direct Force/Aerodynamic Force
Compound Control Technology
Guo Jianguo*,Peng Qian,Zhou Min
(Institute of Precision Guidance and Control,Northwestern Polytechnical University,Xi’an 710072,China)
[HT]? Abstract:
The essence of direct force/aerodynamic force compound control is to improve the maneuverability and rapidity of controlled aircraft by using the fast response speed of direct force, which can effectively compensate the slow response of aerodynamic control caused by insufficient aerodynamic force. This paper describes the characteristics and key problems of?; direct force/aerodynamic force compound control system, and introduces the modeling method of? direct force/aerodynamic force compound control system from three aspects: the configuration of? engine, the existing research of? direct force modeling at home and abroad, and the disturbance modeling of? direct force control.The direct force/aerodynamic force compound control method is introduced from three aspects: the control method, the existing research of direct force/aerodynamic force compound control method at home and abroad, and the ignition algorithm of pulse engine. The feasible direct force/aerodynamic force compound system stability analysis method is given, the future development trend of direct force/aerodynamic force compound control is prospected, and its key technologies are summarized.
Key words: direct force;aerodynamic force;guidance and control system;direct lateral force;control distribution;pulse engine;ignition algorithm
收稿日期: ?2021-07-13
基金項目: 國家自然科學基金項目(61973254;62003270)
作者簡介: 郭建國(1975-), 男, 河南南陽人, 博士, 教授。