上海設施內生菜全程機械化生產方式的研究
2022-03-13 04:56:02范良俊
農業開發與裝備 2022年2期
范良俊
(上海市農業機械研究所,上海市 201100)
0 引言
近年來,在上海市政府和各級相關企事業單位的共同努力下,以雞毛菜、米莧為代表的葉菜類蔬菜已經基本實現了“耕種收”的機械化,這也為其他蔬菜機械化生產提供了堅實的基礎。在十四五開局之年,上海市劃定了3.33萬hm2蔬菜生產保護區,其中包括了6 666.67 hm2生菜種植面積,因此大力推廣生菜綠色種植技術,提高生菜全程機械化生產能力,是保證市民“菜籃子”工程的主要任務之一。
上海種植的生菜品種根據其物理性狀大致可分為皺葉生菜、結球生菜、直立生菜、奶油生菜等,其中以結球生菜和皺葉生菜最為常見,種植面積也相對較大。結球生菜俗稱西生菜,是美國最流行的生菜類型,常見的結球生菜有凱撒、大湖118等,其特點為根系發達,葉片大,葉柄短,單球可重達400~750 g,是生食生菜的主要品種之一;而皺葉生菜最主要的特征就是不結球,莖極為短縮,節間不明顯,葉柄較長,葉面皺縮,單顆重約300~450 g。上海地區種植的生菜品種有意大利生菜、玻璃生菜和結球生菜,由于生菜較耐寒、不耐熱的特點,上海一般從8月下旬~來年5月份都可以在設施內種植。
為了提高生菜生產效率,需要完善相關農機設備的選型和研制,從而不斷提升生菜生產的機械化水平。生菜的生產主要包括整地、作畦、育苗、移栽和收獲等環節,每個環節都要需要采用相關的專業設備來實現作業。
1 旋耕
旋耕作業可以使田土充分細碎、平整種床、恢復土壤耕層結構,通過作業將土肥摻和均勻,提高土壤肥力,同時消滅一部分雜草、減少蟲害,也為下一步農業機械化操作提供保障。旋耕機作業幅寬從1.2~2.2 m不等,所需拖拉機動力也有不同。
設施種植生菜一般為8 m跨度的連棟溫室和8 m單棚為主,設施種植一般采用1.2 m幅寬的旋耕機為最佳,旋耕機的作業深度需達到10 cm以上。采用2 m左右的大型旋耕機雖然可以旋耕作業的時間,但是所需拖拉機動力較大,且機具在設施內掉頭困難,因此不建議采用。
2 作畦
上海現有設施溫室所設計的跨度均為8 m,根據這一現狀對機械化作畦做如下分析和試驗:為了提高土壤的利用率,也為了滿足后續移栽、收獲機械化操作的可行性,對不同畦面進行理論分析,現常用設施內作業的作畦機多為1 m、1.1 m和1.2 m幅寬規格(見圖1,圖2,圖3),通過比較分析,三種不同幅寬在8米跨度作5條畦,上述三種規格每667 m2土地有效種植面積分別為62.5%、68.8%和75%。但考慮到拖拉機輪胎寬度一般從16~20 cm不等,所以相鄰兩個畦底間距一般大于20 cm。綜上所述,1.1 m的幅寬的作畦機更加適合設施內的作業,也更具有可操作性。

圖1 作畦分布圖(1 m)

圖2 作畦分布圖(1.1 m)
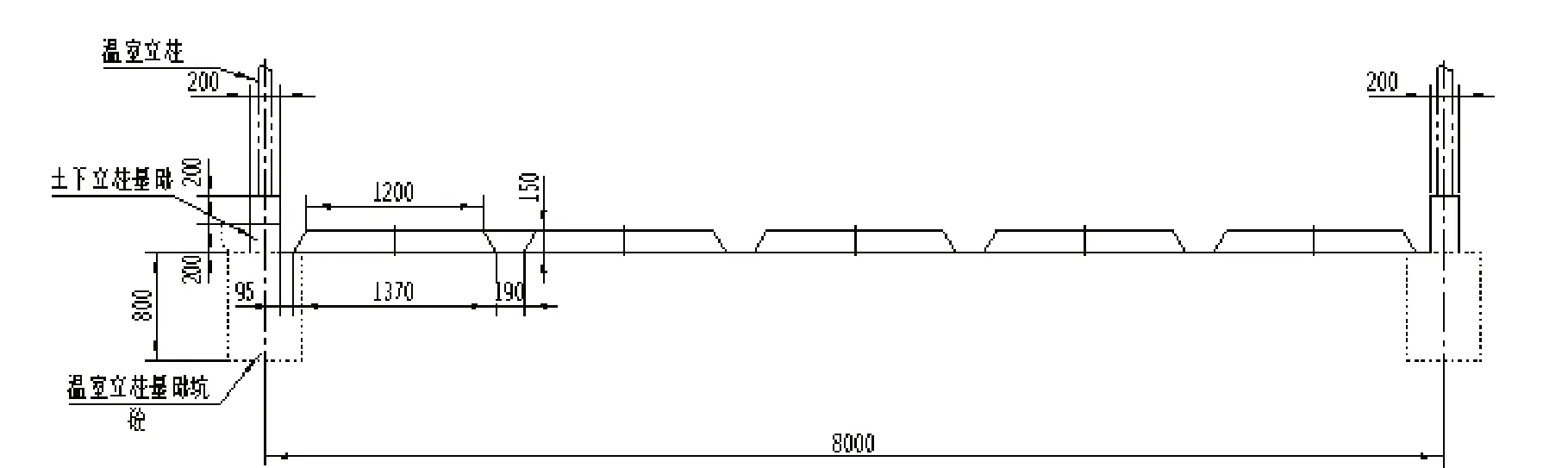
圖3 作畦分布圖(1.2 m)
通過選取了兩種不同形式的作畦機進行作業對比,對畦面緊實度、平整度、效率等數據進行比較分析。常用的作畦機有兩種成型模式,一種為成型板拖拽成型,另一種為液壓滾筒成型。具體型號參數如表1所示:

表1 兩種作畦機各項參數
通過作畦作業后對畦面的比較發現,由于成型板拖拽成型的作畦機屬于被動式成型,對于畦面沒有施加壓力,畦面和兩側面相對松散,表面有一定的魚鱗狀,而帶液壓作畦輪做的作畦機屬于主動式,通過液壓滾筒的擠壓而使畦面成型,所以畦面相對平整且不易塌陷,更有利于機械化的移栽和采收環節。兩種畦面效果如圖4所示,圖中左側畦為成型板拖拽成型的畦面,右側為液壓滾筒成型的畦面。

圖4 兩種作畦機作畦效果
此外,通過溫濕度儀器和堅實度儀對兩種畦面的堅實度進行了測試,測試數據見圖5,圖6。

圖5 兩種作畦機前后含水量對比
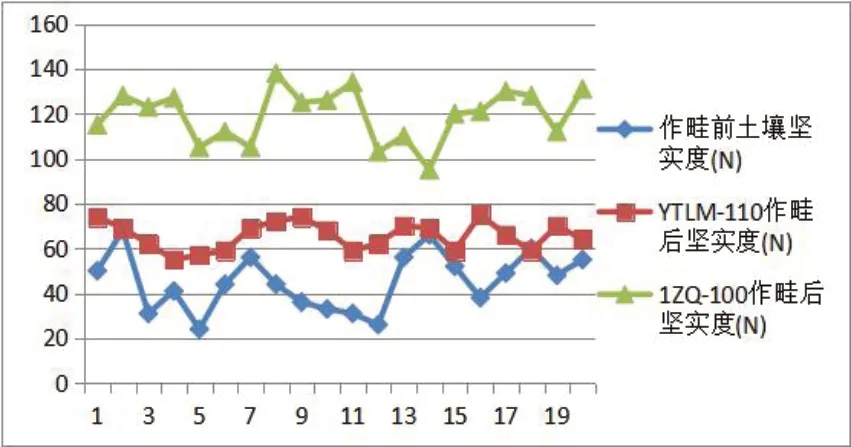
圖6 兩種作畦機前后堅實度對比
由于生菜對水分要求非常嚴格,所以栽培上必須經常保持土壤濕潤,通過對兩種作畦機在作畦前后含水量和堅實度的對比發現,在相同旋耕深度情況下,帶液壓鎮壓的作畦機由于對畦面有鎮壓功能,作業時需要控制一定速度來保持一定堅實度,行走速度相對慢,但因此其碎土效果反而會更好,保水效果也更高。更加適意生菜的生長,其次堅實度相對較高也會使得畦面平整度有所提升,這樣為之后的機械化收獲也帶來一定的優勢。
3 育苗及移栽
生菜的種子非常小,而且發芽時間一般在5~10天,同時生菜的種子價格昂貴,采用撒播方式播種用種量較大,尤其是大面積種植時,難以保證田間幼苗生長一致性,也無法培育壯苗,對生菜后期生長一致性不好控制。所以育苗移栽種植更加適合,播種可采用蔬菜精量播種流水線,播種效率可以高達400~500盤/h,播種精度最高可以達到99%。播種后的生菜需要在催芽室放置一至兩天,再移到設施內進行育苗,根據天氣情況一般15~30天可以進行移栽種植。
經過調研,以加州大速生為例,可在1.1 m畦面上種植4~6行,通過篩選選擇兩種適合1.1米畦面種植的移栽機進行移栽對比試驗,具體參數見表2。

表2 兩種移栽機參數
井關(2ZY-2A)兩行移栽機由一人操作,在1.1 m畦面作業需要掉頭一次,而禾田(A5-1200)八行高密度移栽機可以通過改變移栽行距實現四行移栽。在相同前提情況下作了作業對比,具體數據見表3。

表3 兩種移栽機作業參數比較
由上述數據導致機械化移栽不合格的原因一般是由于缽苗在下苗的過程不暢,出現堵苗的情況,所以為例避免這一情況,在育苗時控制苗的大小尤為重要;其次現有的移栽機大部分采用鴨嘴式的投苗裝置,再通過覆土滾輪覆土,投苗裝置的頻率、開合大小等參數和覆土裝置的合理性直接決定了是否存在倒苗的情況;關于移栽效率,在1.1 m畦面移栽,由于A5-1200移栽機需要兩人作業,實際操作時無法保證兩個人速度同步,所以單程移栽效率方面,2ZY-2A的效率更高,但是由于所移栽的行數限制,兩行比四行需要多走一次,總體效率較低。
4 收獲
生菜相比其他綠葉菜而言,生根較淺、單球重、節間不明顯,割刀需要緊貼土壤進行切割作業,因此在割頭的形式上選擇,擺刀更適合生菜的采收作業。相比較剪切式和帶刀式,擺刀可以入土或實現貼地收割,將生菜完整收獲。擺刀的運動軌跡一般由偏心軸承和連桿機構實現,擺動刀頻率應控制在合理范圍內,由于生菜單顆重量較重,在割臺的傾斜角不能過大,輸送帶要有一定阻力,防止生菜下落。根據上述特點和要求,選擇了兩款典型收割機,在上海嘉定百蒂凱生菜專業生產的合作社進行收獲試驗。詳細參數見表4。

表4 兩種作收割機各項參數
兩款綠葉菜收割機無論從結構、行走方式、控制方式等方面都有很大不同,因此我們對生菜采收設備的每個環節做了比較試驗,結論如下。
4.1 行走方式
4UM-120A葉菜收獲機為壟上行走的手扶式收割機,4GCZ-100葉菜收獲機為壟下行走的乘坐式收割機,前者的轉向通過人工轉向和糾偏,行走部件除了后輪差速器驅動,前輪為導向輪,在工作時容易發生偏轉,對人為糾偏的過程產生一定影響,但整體結構相對簡單;后者為履帶自走式,通過電動手柄控制電比例泵來實現轉向,操控相對簡單,但設備體積較大。
4.2 割刀參數
兩臺收割機均為擺動式鋸齒刀,在設計時擺動幅度和頻率尤為重要,頻率過高使整個機身都產生晃動,降低設備使用壽命,頻率太低無法有效切割菜根,作業效果大打折扣,其次,過大的擺動幅度也會導致設備機構晃動過大,使設備整體的穩定性降低,控制在5 cm以內即可。經過多次收割試驗,擺動頻率達到500次/min,就可實現生菜的切割作業。相比兩款收獲機,4UM-120A手扶式收割機擺動頻率可調可以因地制宜的根據不同菜品調整割刀的擺動頻率,實現無級調速。
4.3 前進速度
由于生菜株距較大,無法靠后排菜的擠壓實現收獲,且割刀不同的收獲高度也應該采用不同的前進速度。以4UM-120A手扶式葉菜收獲機為例,由于沒有仿形系統,一般采用土下收割的方式,這樣收割高度基本恒定,且土下收割收獲的菜品相對完整;而4GCZ-100自走式葉菜收獲機帶后置式仿形系統,不建議土下收割,一旦土下切割就會將基準破壞,仿形作用也隨之失效,只可貼地切割。由于生菜單顆重,根莖較粗,速度太慢會推到生菜導致菜品不完整,所以前進速度要相對快,經過測試,速度控制在30 mm/s以上收獲效果較理想。但速度不宜過快,過快后設備的操作性難度上升,作業難度加大。
4.4 割臺參數
割臺輸送帶的輸送速度和收獲角度也尤為重要,且與前進速度有一定的關系,割臺輸送帶的線速度基本與前進速度一致,且割臺與地面的角度小于30°,根據不同生菜品種角度應該適當降低,生菜單顆重量越大,高度越小。
4.5 收獲效果
綜合對比兩款收割機的作業效果(表5,圖7,圖8),得出如下結論。

圖7 自走式綠葉菜收獲機

圖8 手扶式綠葉菜收獲機
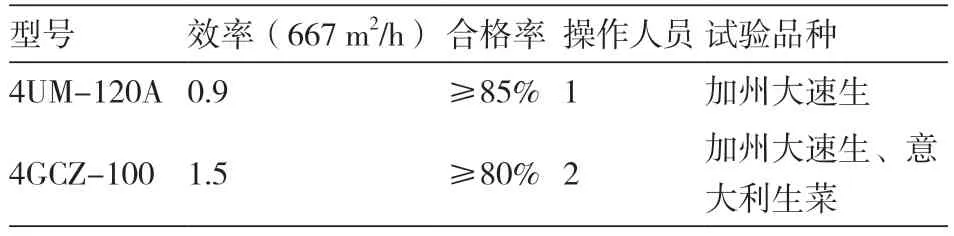
表5 兩種作收割機作業參數
1)擺刀的割刀形式最適宜生菜的收割,且擺動頻率不低于500次每分;
2)割臺角度不易過大,否則會導致生菜運輸時下落影響收獲效果;
3)相比手扶式,自走式地盤的操控性更高;
4)土下收割方式不適宜帶后置式仿形系統,會破壞基準影響收獲效果;
5)土上或貼地收割方式可以帶仿形系統,來提高收獲效果;
6)無論是否帶有仿形系統,為保證采收質量,一定要有相對平整的畦面。
5 制約因素
通過本次調研及各項測試,基本總結了適用于生菜機械化生產的機械設備。但由于各個生菜生產的合作社并沒有統一生產標準,所以要想實現生菜機械化生產還有一些制約因素。
5.1 傳統設施制約
上海現有的設施以傳統的8 m單棚為主,還有不少6 m單棚,棚門高不足2 m,兩側斜度較大,機械設備操作空間小、難度大。
5.2 土地利用率低
傳統單棚長度一般不超過50 m,由于機械操作需要一定的調頭空間,所以土地利用率相對傳統人工生產還有一定差距。
5.3 機械設備自身存在缺陷
帶整壓的作畦機雖然作畦平整度高,但是要求作畦速度慢;半自動移栽機雖然能夠改變人工彎腰工作的狀態,但是效率較低,省力不省功;收獲機械相對于人工收獲的合格率還是存在一定差距。
5.4 對機械化生產需求不平衡
由于上海各個地區勞動密度不同,有些地區勞動人員相對充足,這就導致很多合作社還是采用最傳統的人工為主的生產模式。但有些地區的合作社已經很難招到合適的大量的人員,對于機械化作業相當迫切。
5.5 農機人才培養滯后
傳統生菜生產人員對于農機的操作還停留在操作拖拉機的階段,且年齡較大,對于新型機械化生產設備消化能力較慢;而青年農機機手人數較少,整個人才梯隊培養滯后。
6 生菜機械化生產建議
6.1 加快設施宜機化改造
對于設施單棚改造刻不容緩,過溝板的加寬,端門的擴大,甚至全開式端門都利于機械化的操作,且一定程度上增加了土地的利用率。
6.2 推動農機農藝融合
有些生菜品種單顆重、生根較淺、節間不明顯,這些都不利于機械化的作業,所以可以從農藝上選育一些產量高、抗病強且適合于機收的品種。
6.3 加強機械化整體生產模式推廣
生菜生產過程中,部分環節已經實現了機械化作業,但是要實現整體機械化生產模式,還需要將每個環節相互配套,特別是為了采收環節的機械作業,前期的整地、作畦等工序就應該選擇相應配套的設備,來保證采收時畦面的平整度和堅實度等問題。
6.4 提高機械化設備適應性
針對不同生菜的物理特性,在機械設備的設計上應該多考慮不同品種的通用性和適用性,實現一機多用,滿足合作社不同品種生菜機械化生產的需求。
6.5 提升機械化設備自動化水平
在設備設計和選用過程中,應不斷提升設備自動化水平,特別是生菜機械化移栽、收獲的環節中,解決省力不省功的情況,提高作業合格率的問題,努力提升設備可靠性和自動化水平,也為將來智能化轉型做好充足準備。
7 結語
上海作為一個2 400萬常住人口的超大型城市,保證蔬菜自供能力是基本前提,而機械化作業的生產方式是最好的方法之一。上海的生菜的機械化生產還在起步階段,存在種植方式差異化、設施和機械配套難度大和各個環節設備相對較少等情況,還需要不斷的試驗優化,加大推廣力度,為實現生菜機械化生產做足準備。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國化肥信息(2020年7期)2020-03-19 01:54:02
電子制作(2018年11期)2018-08-04 03:26:08
中國軍轉民(2017年6期)2018-01-31 02:22:28
故事大王(2016年7期)2016-09-22 17:30:08
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
機械制造文摘(焊接分冊)(2014年5期)2014-03-20 13:57:44