航空反潛魚雷搜捕概率分析?
2022-03-14 15:18:22韓建立李新成呂照富周云飛李軍東
艦船電子工程 2022年2期
郭 聚 韓建立 李新成 呂照富 周云飛 李軍東
(1.海軍航空大學 煙臺 264001)(2.中國人民解放軍65529部隊 遼陽 111000)(3.中國人民解放軍61267部隊 北京 101123)
1 引言
隨著潛艇威脅的增加,高效的反潛措施變得異常重要。潛艇具有較低的噪聲輻射、其依賴隱蔽性高的特性潛伏在海中難以被發現,而相比之下,它可以很容易地識別攻擊水面艦艇或來襲魚雷[1]。因此,為了提高攻潛效率,攻潛魚雷必須相對潛艇較近的距離發射,使得潛艇沒有足夠時間完成機動或對抗。這使得空投魚雷成為最有效的攻擊潛艇的武器之一[2]。在航空反潛作戰中,攜帶空投魚雷的航空反潛機接收到吊放聲吶探測定位到的潛艇位置信息后,迅速攜帶魚雷飛往指定坐標進行投雷,由于多種誤差共同作用,使得魚雷落水點與理想落點存在誤差[3],落點誤差、投雷點與潛艇的方位、距離都會影響空投魚雷的搜索概率。本文將結合落點誤差討論空投魚雷投雷距離與方位對搜索概率的影響。
2 魚雷模型建立
2.1 坐標系轉換
魚雷坐標系中od為魚雷的重心或形心。令軸沿魚雷運動航向;軸與魚雷運動航向垂直并定義向上為正;軸與軸和軸構成的平面垂直并服從右手系。
將魚雷坐標系轉換到地理坐標系中,可以通過魚雷質心在地理坐標系中的三個坐標點和兩坐標系之間的夾角可以用魚雷三個姿態角來描述,如圖1所示。
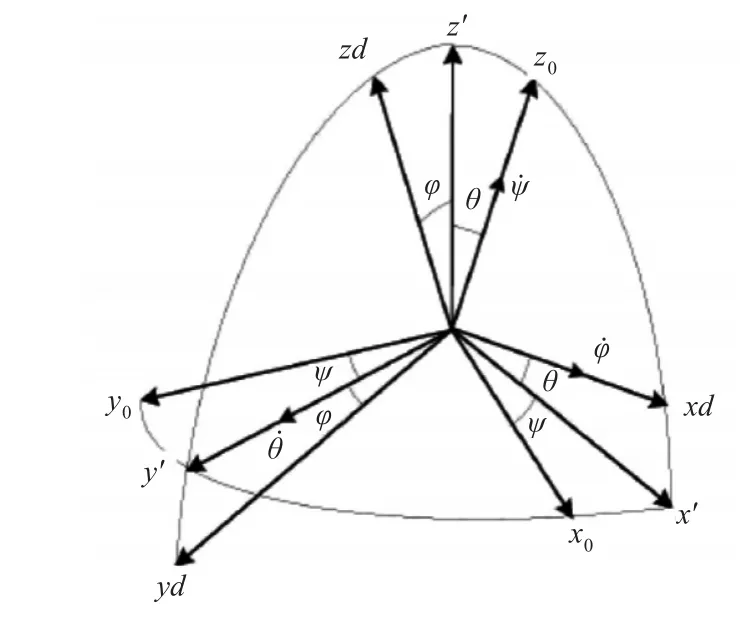
圖1 魚雷姿態角
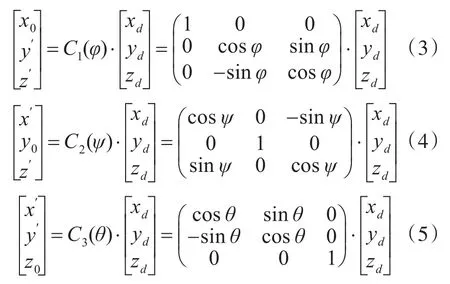
圖1中θ為魚雷的俯仰角、ψ為魚雷的偏航角、φ為魚雷的橫滾角。(xd,yd,zd)為魚雷在魚雷坐標系中的坐標,(x0,y0,z0)為魚雷在地理坐標系中的坐標,故有:
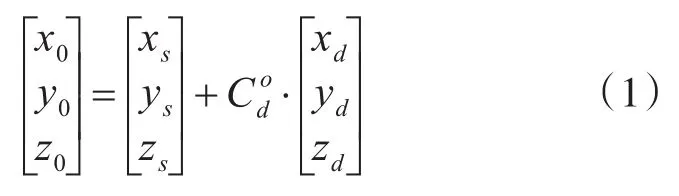
式中:
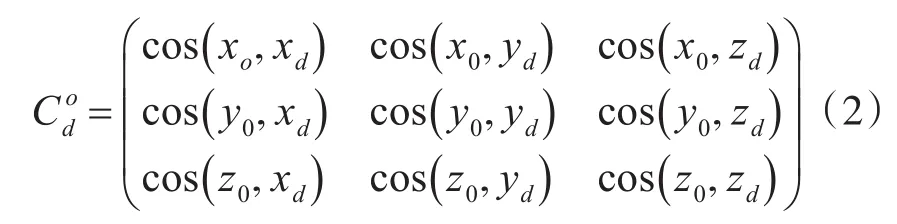
稱式(2)中各元素為方向余弦,表示兩坐標系之間相應各軸的夾角的余弦,坐標系的轉換可以理解為魚雷姿態角的旋轉,即:

2.2 環型彈道模型
由于魚雷運動在垂直面的運動狀態比較單一,為簡化考慮在模擬中只考慮水平面的運動,如果需要可對垂直面的運動進行分解[4]。假設魚雷環形角速度為ωT(定義向左運動為正向,)tc時刻在坐標(Xc,Yc,Zc)點進行環形搜索,定義魚雷初始位置為原點,初始時刻魚雷航向為y1軸。所建環形搜索模型如圖2所示。
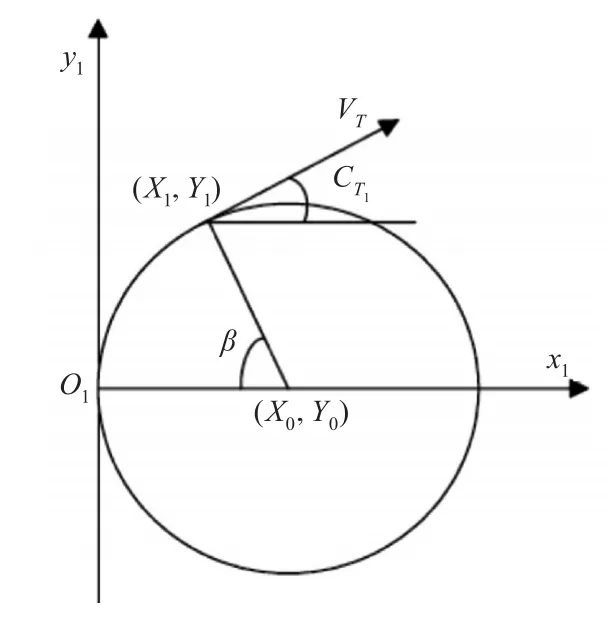
圖2 環形彈道模型
環形彈道半徑Rat=Vt/ωT,環形彈道圓心(-ωT?Rat,0,Zc),魚雷在t1時刻的回旋角度為β=ωT(t1-tc),魚雷在t1時刻在魚雷坐標系中的坐標和航向為
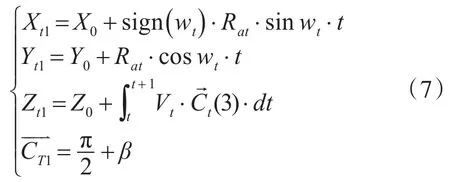
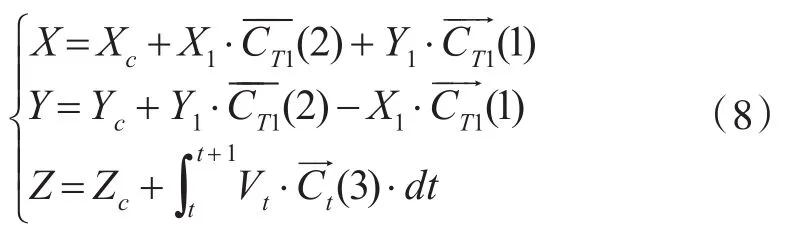
相應可得t1時刻魚雷在地理坐標系中的位置(X,Y,Z):
2.3 空投魚雷散布誤差
空投魚雷對潛攻擊時,火控系統根據聲吶反饋到的目標信息解算投雷點,由于影響投雷的因素較多如:降落傘參數、投放條件、火控系統、聲吶定位等,這些條件在整個復雜的投雷過程中均會存在誤差,故空投魚雷落點存在誤差[5]。圖3是以400m高度,200km/h速度前飛投雷時的投雷誤差散點圖。
圖3 空投魚雷散布點圖
根據已有的研究可得,空投魚雷誤差服從正態分布,并且落點誤差可分解為與航向平行、垂直兩個方向并且相互獨立。由投雷誤差經驗公式可得,魚雷在雷體坐標系中x軸方向(平行于魚雷航向)和y軸方向(垂直于魚雷航向)的散布均偏差分別為[6]

式中:H為反潛機投雷時的飛行高度,V為反潛機投雷時的飛行速度。圖4、圖5為航速0~400km/h,飛行高度10m~500m情況下x方向和y方向上的投雷誤差。
圖4 空投魚雷x方向上散布趨勢
圖5 空投魚雷y方向上散布趨勢
由正態分布定義可得概率偏差和均方差的關系如下:

又因ρ≈0.4769[7],可得:
投雷偏差數據適用于雷體坐標系中,在實際作戰使用時,需要將坐標系變換到地理坐標系中。故需要將投雷誤差進行轉換,可得下式:
3 反潛魚雷聲自導模型
聲吶方程分為主動聲吶方程和被動聲吶方程,主動聲吶方程又分為噪聲掩蔽下和混響掩蔽下的聲吶方程[8]。本文主要考慮噪聲條件下搜捕情況。噪聲掩蔽下的聲吶方程為

將魚雷的各項參數帶入聲吶方程中,可準確計算魚雷主動自導作用距離,但在實際研究中自導發射聲源級SL(dB)、自導接收指向性指數DI(dB)、檢測閾DT(dB)的參數獲得十分困難,在現有情況下,利用有限的數據進行較為準確的仿真是我們研究的重點。
3.1 傳播損失
為簡化傳播損失的描述,通常用球面擴展加吸收損失對傳播損失進行估算[9]。即:

式中TL為傳播損失(dB);r為傳播距離(m);β為對數吸聲系數(dB/km)。
常用的聲吸收系數估算公式有:
式中:f為聲波頻率(kHz);T為海水溫度(°K);S為每千克海水中鹽的總重量(g),成為海水鹽度;為弛豫頻率(kHz):

k為與海水溫度有關的系數:

上式較為全面地反映聲吸收系數的影響因素。對現役魚雷一般可取β=4dB/km~8dB/km計算[10]。
3.2 目標反射強度
物體的目標反射強度不是定值,與物體的反射面積等諸多因素有關。在實際作戰中實測潛艇目標強度是與聲吶發出聲波探測到潛艇時潛艇的反射面積決定的,即可轉換為潛艇航向角和魚雷航向角的夾角構成的函數[11],即:

TSmax為最大反射強度,通常情況下潛艇橫向反射強度最大,艇首和艇尾最小。α為潛艇航向與魚雷航向夾角。
3.3 魚雷干擾噪聲級
聲自導魚雷的干擾噪聲來源主要是由魚雷航行的自噪聲和海洋環境噪聲共同組成。但通常情況下魚雷自噪聲級遠大于海洋噪聲級,故本文只考慮魚雷自噪聲[12]。
4 主動自導檢測模型
聲吶方程是判定主動聲自導系統的依據,聲吶方程將聲信號的強弱與距離、角度構成聯系,方便在仿真中進行檢測。
4.1 求解自導作用距離
若目標在魚雷的自導搜索角度范圍內,在發現目標時記目標航向與魚雷航向的夾角為Q。進一步可求得目標強度TS。將魚雷參數SL、NL、DI、DT帶入式(14)可得傳播損失TL,從而得到自導作用距離r。由魚雷、潛艇坐標求得兩者距離D,通過比較r、D的大小即可判斷魚雷是否搜捕到目標[13]。
4.2 求解回聲級
式(14)中NL-DI+DT項稱為噪聲掩蔽級,它是聲自導裝置在給定條件下能發現的最小信號級。SL-2TL+TS是換能器實際收到的信號強度,稱為回聲信號級。根據魚雷、潛艇的航向,求得潛艇航向相對魚雷航向的夾角Q,繼而可求TS。再由潛艇與魚雷的距離D,求得TL。代入SL-2TL+TS中可求得該條件下的回聲級。如果SL-2TL+TS≥NL-DI+DT則捕獲目標;反之為搜索到目標[14]。
4.3 聲吶方程的簡化使用
上述兩種方法需要求得SL、DI、DT等參數,但實際情況很難獲得真實的裝備數據。為了仿真的真實性,需要對式(14)進行變形。根據式(14)可知在仿真過程中只有TS和TL是隨潛艇、魚雷的航向、位置在不斷變化的,SL、DI、DT是基本不變的,將變量右移,常量左移得:

式(20)中不等式右邊是聲自導系統能探測到目標時最大的能量損失值,可將其作為定值,即令:

在仿真中任一時刻根據魚雷到目標的距離D和魚雷潛艇的航向夾角,求得TS和TL值,令

可求得任一時刻的損失的能力。然后判斷是否滿足POWACT≤POWMAX,即只要該值小于最大能量損失允許值,則認為聲吶主動檢測到目標,反之聲吶探測不到目標。
通過式(20~22)可以在沒有詳細魚雷自導系統參數的情況下,而根據TSmax對應的檢測距離r為條件建立目標檢測模型,該方法能真實反映自導系統的搜捕能力[15]。
5 仿真模型
5.1 仿真條件
本文對空投魚雷對潛搜捕概率模擬原則如下:
1)反潛模式為應召反潛,反潛機接到目標位置信息后飛抵預定點位進行投雷,魚雷初始航向為潛艇當前點位。投雷速度0~300km/h,投雷高度50m~300m;
2)魚雷采用主動聲自導,環形搜索模式;
3)本文只考慮搜捕概率,即只要魚雷探測到潛艇即認為搜捕成功;
4)由于潛艇探測到魚雷采取機動需要一定反應時間,而本文只考慮魚雷探測概率,不涉及后續跟蹤,故為簡化模型,定義潛艇沿地理坐標系中的x軸正向做勻速直線運動。
5.2 雷、艇相對弦角、距離計算模型
上式中,F、r為魚雷相對于潛艇的弦角、距離;xl、yl為魚雷坐標;xt、yt為潛艇坐標。
5.3 仿真參數
仿真參數如表1所示。
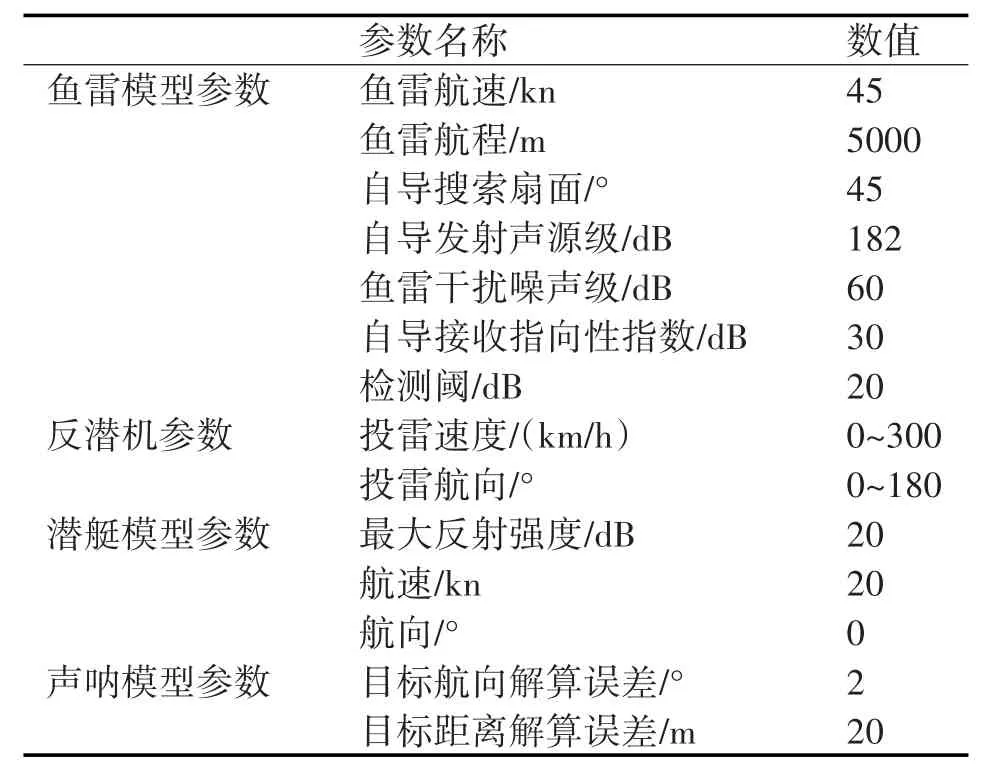
表1 仿真參數
6 仿真結果
反潛機以20m高度、200km/h投雷,因仿真模型具有的對稱性,故只考慮反潛機從潛艇一側投雷的情況,即魚雷與潛艇弦角在0°~180°之間每間隔10°取一點,投雷距離1100m~2100m時每間隔200m取一點,每點仿真2000次,得魚雷命中概率如圖6。
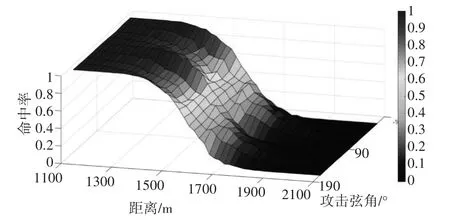
圖6 仿真圖形
由圖6可知在魚雷自導性能確定的情況下,投雷距離越近,命中概率越高;在投雷距離大于1500m時,以45°和135°弦角投雷時魚雷搜索到目標的概率高于其他角度的搜索概率,在投雷距離小于1500m時,以0°、90°、180°投雷時魚雷搜索到目標的概率高于其他角度的搜索概率。
7 結語
通過分析魚雷的落點散布誤差模型、魚雷水下環形搜捕運動模型、聲自導檢測模型,結合蒙特卡洛法仿真得到如下結論:在實際作戰中,應盡可能靠近潛艇位置進行投雷,以期獲得較高的命中概率。在投雷距離小于1500m時,應優先選擇0°、90°、180°進行投雷,來獲得較高命中概率;在投雷距離大于1500m時,應優先選擇45°、135°進行投雷,來獲得較高的命中概率。