一種改進的捷聯慣導三子樣劃槳誤差補償算法?
2022-03-14 15:18:28耿騰飛陳世強
艦船電子工程 2022年2期
關鍵詞:振動
耿騰飛 劉 明 陳世強
(云南民族大學 昆明 650031)
1 引言
在捷聯慣性導航系統中,由于載體位置的不斷變化,加速度計和陀螺常常受到不同程度的線運動與角運動的干擾,導致在對加速度計的比力信息進行積分時存在劃槳誤差,對陀螺的輸出信息進行積分存在圓錐誤差,因此在更新過程中必須對其進行補償。目前已經有大量學者對于圓錐誤差的補償算法進行了一系列的研究[1~4],有效地提高了姿態解算的精度;也有不少學者針對劃槳誤差的補償算法做了大量的研究與改進[5~9],來提高速度解算的精度。文獻[10]利用算法的對偶性原理,根據圓錐誤差的一般形式得到了劃槳誤差補償的一般形式;文獻[11]利用已求得的姿態矩陣,推導出一種新的劃槳誤差補償積分算法,此算法計算量小,精度高;文獻[12]針對角增量劃槳誤差補償算法直接應用于角速率捷聯慣導中誤差增大的現象,推導出基于角速率的劃槳誤差補償系數方程。本文通過劃槳誤差與圓錐誤差的對偶關系,提出一種采用前一周期速度增量和角增量的改進三子樣劃槳誤差補償算法,經過對比分析改進后的算法精度有所提高。
2 劃槳效應
選取“東北天”地理坐標系為SINS的導航坐標系,速度基本方程為

對式(1)在tm-1到tm時間段進行積分,可得:

其中:
由于
將式(4)代入式(3)可得到:
式中最后一項為劃槳誤差補償。

3 傳統劃槳誤差補償算法
文獻[5]給出了傳統劃槳誤差補償算法的一般形式,并詳細推導了劃槳誤差補償系數的過程,與圓錐誤差補償算法具有對偶性,可得三子樣算法為
可驗證與圓錐誤差補償算法系數相同,算法具有對偶性,上述是用多項式擬合得到,但是實際中載體運動十分復雜,以算法漂移誤差最小為標準,可得優化三字樣算法:

4 改進劃槳誤差補償算法
參考利用前一周期陀螺角增量信息改進圓錐誤差補償的算法,改進劃槳算法的一般形式為m-1為前一時刻補償周期,G為補償系數。
文中對改進的三子樣算法進行詳細的推導計算。
設更新周期為T,假設典型的劃槳運動中角速度和比力為
i,j是兩正交軸的單位矢量,B,C為角振動和線振動幅值,Ω為振動角頻率。
由式(9)可得補償公式為
當僅考慮直流分量時:

僅考慮直流分量時又有以下恒等式:
將式(13)和式(14)代如式(11)得:
由文獻[10]可知,傳統劃槳效應的補償值為
由此可得改進三子樣算法誤差為

可以得到方程組如下:
解得:
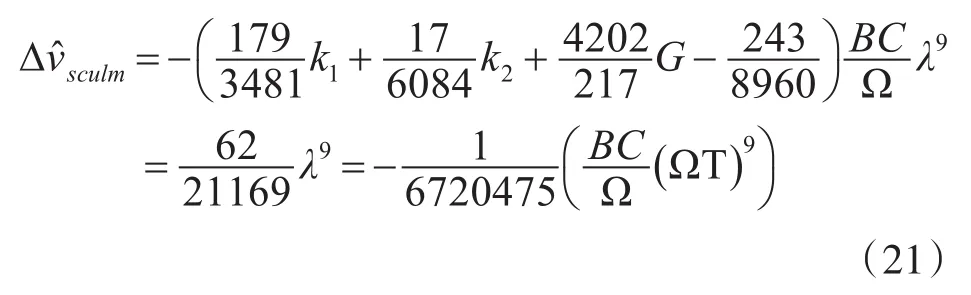
可得改進算法誤差為
通過式(19)令G=0,同樣可得傳統三子樣算法方程組如下:
可解得:

所得系數與傳統三子樣劃槳誤差算法系數完全一致,從側面驗證了推導過程的正確性。
傳統三子樣算法誤差為
根據式(21)和式(24)的結果,可以看出誤差比傳統算法有明顯的減小。
令B=0.5,C=0.2,T=0.1,兩種算法的誤差如表1所示。其誤差曲線圖如圖1所示。

表1 不同振動頻率Ω下的算法誤差
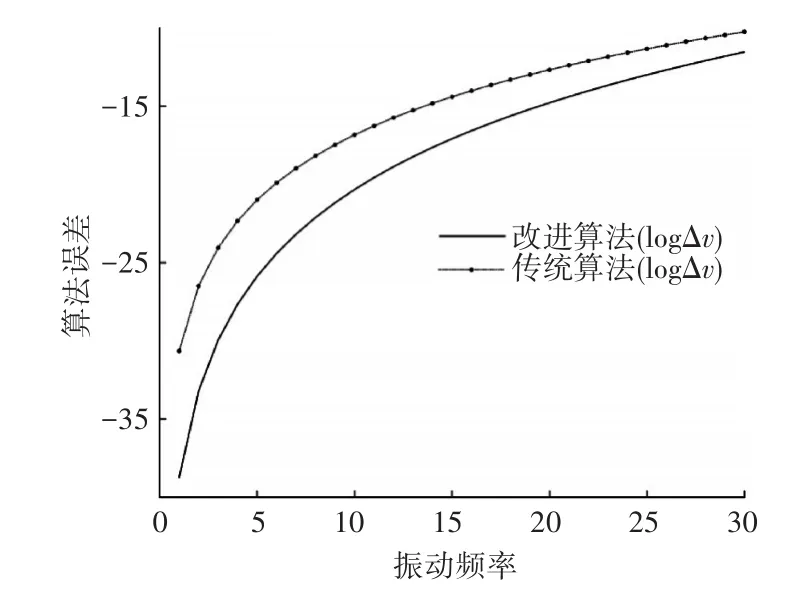
圖1 算法誤差與振動頻率Ω的關系
經分析可知不管是傳統算法還是改進算法都與振動頻率Ω有關系,且隨著振動頻率Ω的增大而增大,在相同頻率下,可以看出改進算法有明顯的優勢。
5 結語
文中依據圓錐誤差補償算法與劃槳誤差補償算法的對偶性,提出一種采用前一周期速度增量和角增量的改進三子樣劃槳誤差補償算法,利用算法漂移誤差最小原則,詳細推導了誤差補償系數,并依據此算法求出傳統劃槳三子樣補償系數,通過比較可知新算法精度有所提高,具有一定的應用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00