基于卷積神經網絡的鈍體尾跡識別研究1)
2022-03-19 01:54:36杜祥波陳少強侯靖堯胡海豹
力學學報 2022年1期
杜祥波 * 陳少強 侯靖堯 ** 張 帆 * 胡海豹 *, 任 峰 *,
* (西北工業大學航海學院,西安 710072)
? (中國船舶集體有限公司第七〇五研究所,西安 710077)
** (中國船舶科學研究中心水動力學科研部,江蘇無錫 214082)
引言
在流體中運動的物體通常會留下長長的尾跡,這些尾流場中包含有豐富的運動對象和運動狀態信息,可用于探測,甚至用于制導運動[1-4].本文為獲得清晰的流場尾跡圖像,專門搭建了豎直肥皂膜水洞.由于肥皂膜中的流動是目前最為近似的二維流動[5-7],因此吸引了大量學者的關注.早在2001 年,Rutgers等[8]對二維肥皂膜水洞裝置及相關的實驗測量方法,流場顯示等問題進行了詳細的闡述,為后續實驗研究打下了堅實的基礎.在國內,同樣有大量學者基于肥皂膜水洞開展了流體相關研究.例如,高宗海等[9]搭建并測試了用于小雷諾數流動顯示研究的水平式肥皂膜水洞,拍攝到鈍體在小雷諾數下的細微流動特征.賈來兵[10]利用豎直肥皂膜水洞研究自由擺動的柔性體與流體的相互作用,并建立了相應的數學模型.上述研究有力證實了肥皂膜裝置用于顯示二維流場尾跡時具有穩定可靠的性能,相關實驗研究比較成熟.不過,由于一般鈍體的尾流場十分復雜,造成流動結構的分辨仍比較困難,例如,相同特征長度、不同形狀鈍體的尾跡結構大體相似,單憑人的肉眼難以區分.目前,針對這一問題仍未見相關研究的報道.
隨著深度學習算法的發展,以數據驅動方式建立特征識別與預測模型的方法[11-12],已經在許多領域取得了良好的應用效果.如趙西增等[13]利用卷積神經網絡(CNN)對不同工況下的波浪透射系數及透射波波形進行了成功預測.Roggen[14]基于CNN和長短期記憶神經網絡(LSTM)的模型和多模態可穿戴設備實現了對人體活動的識別.Dong 等[15]基于無監督學習的CNN 模型準確識別了交通工具類型.魏曉良等[16]利用混合的LSTM 和CNN 對高速柱塞泵的空化程度進行了預測,該模型在無噪聲情況下準確率高達99.5%.可見,卷積神經網絡在用于數據預測和特征識別時,具有優異的精度特性.
基于深度學習方法,前人雖做過不少特征識別研究,但由流體尾跡結構預測鈍體形狀或判斷雷諾數的研究尚未見報道.針對同一特征長度不同類型的鈍體,尾跡結構十分相似,即尾跡圖像對應的鈍體形狀信息或雷諾數難以提取.因此,本文提出基于卷積神經網絡的尾跡識別方法,通過豎直肥皂膜水洞,采集三種鈍體的尾跡作為CNN 的輸入,對應鈍體的形狀或雷諾數作為CNN 的輸出,由卷積神經網絡建立相應的數據映射關系,以期實現根據尾跡圖像準確識別出對應鈍體的形狀或雷諾數的效果.
1 實驗平臺
1.1 豎直肥皂膜實驗裝置
豎直肥皂膜裝置結構如圖1 所示[17],肥皂膜水洞主要由上水箱、噴嘴、流量調節閥、導引線、下水箱和水泵等組成,支撐結構采用4040C 鋁型材,整體裝置高約2.5 m,寬約0.6 m.
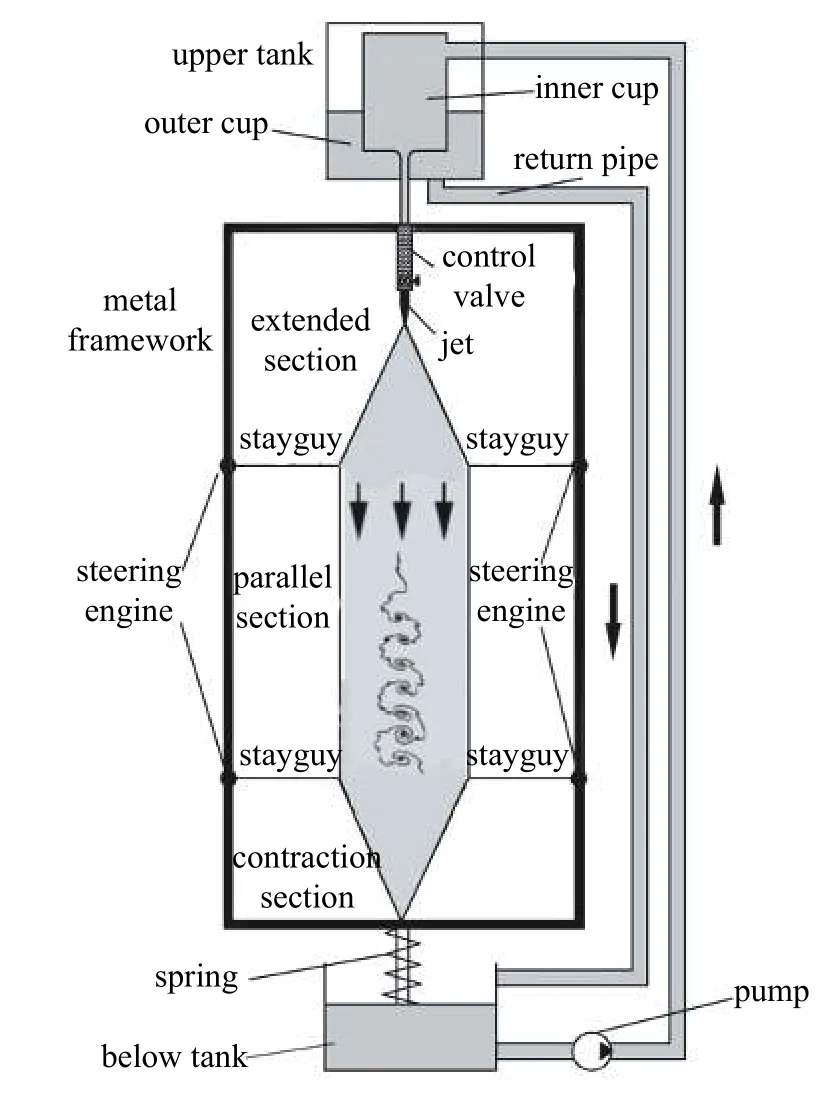
圖1 肥皂膜水洞結構圖Fig.1 Schematics of the vertical soap-film tunnel
肥皂液采用工業洗潔精和水按體積比為1:4 配置,攪拌均勻后放置在下水箱中,在水泵的作用下輸運至上水箱.裝置頂部的上水箱采用有機玻璃制成,并分為內杯和外杯.肥皂液泵入上水箱內杯,由于水泵輸出的流量大于實驗需要的流量,保證在實驗過程中內杯頂部的溶液能夠一直溢流到外杯,使系統的水頭高度保持不變.內杯下端連接流量調節閥,通過調節流量調節閥改變系統的流速.實驗前,4 根拉線處于放松狀態,兩根導引線合攏.打開流量調節閥后,在重力的驅動下,肥皂液經由上水箱與噴嘴流出,待導引線完全被肥皂液潤濕后,舵機自動拉開導引線從而避免手動牽引引入誤差,此時會形成寬14 cm的導流框,導流框分為3 段,即擴張段、平行段和收縮段.平行段肥皂膜由于重力和空氣阻力相對平衡,流速平穩,作為試驗段并用于捕獲流場尾跡特征.肥皂液流回下水箱,再由水泵泵入上水箱,從而循環往復工作.
1.2 鈍體模型及圖像采集系統
典型鈍體模型采用3 種截面形狀為圓柱,三角柱和方柱的鈍體.材料采用白色樹脂,利用3D 打印技術加工,特征長度統一取10 mm,并垂直于來流方向放置在水洞試驗段.鈍體的展向長度遠大于肥皂膜的厚度,保證該流動實驗有效近似二維流動.
實驗采用光學干涉法來顯示流場,圖2 為照明和拍攝裝置的位置示意圖.為使拍攝到的尾跡圖像清晰,選擇功率為800 W 的高壓鈉燈作為干涉光源,在高壓鈉燈前布放一塊柔光板,使鈉燈光線更均勻,尾跡圖像更加清晰、光亮.待鈉燈亮度穩定后,進行實驗拍攝,拍攝的裝置為高速相機和高清單反相機,高速相機拍攝鈍體尾跡近場形態結構,還用于標定實驗系統的流速,拍攝頻率為500 幀,分辨率960 ×240,高清單反相機主要是錄制鈍體后的尾跡結構,頻率為10 幀,分辨率4096 × 2160.
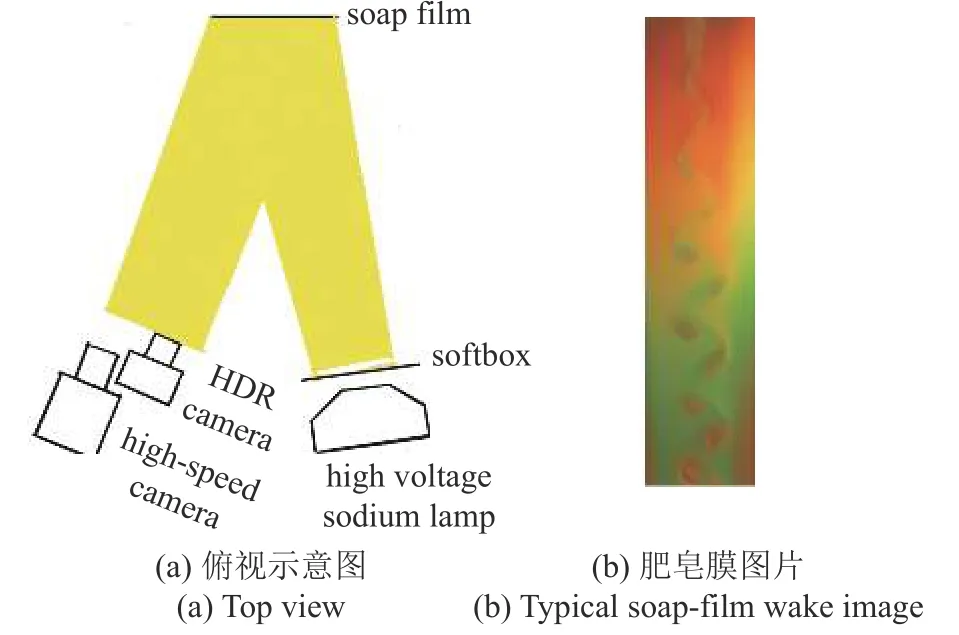
圖2 照明和拍攝裝置示意圖Fig.2 Positions of the lighting device and the shooting device
2 實驗測量和圖像捕捉的方法
2.1 肥皂膜參數測量
實驗中采用粒子示蹤法測量肥皂液流速,即通過高速攝影技術捕捉肥皂膜中伴流顆粒物(肥皂液落入的少量微顆粒,不需要另加粒子)在前后兩幀照片中的位移量來換算出肥皂膜流速.為減小測量誤差,這里進行3 次重復測量,取平均值(速度的相對誤差<2%).從圖3 中給出的流量與液膜流速對應關系曲線可以看出,該裝置流速穩定可調,調速流速范圍為1.0~ 2.0 m/s.
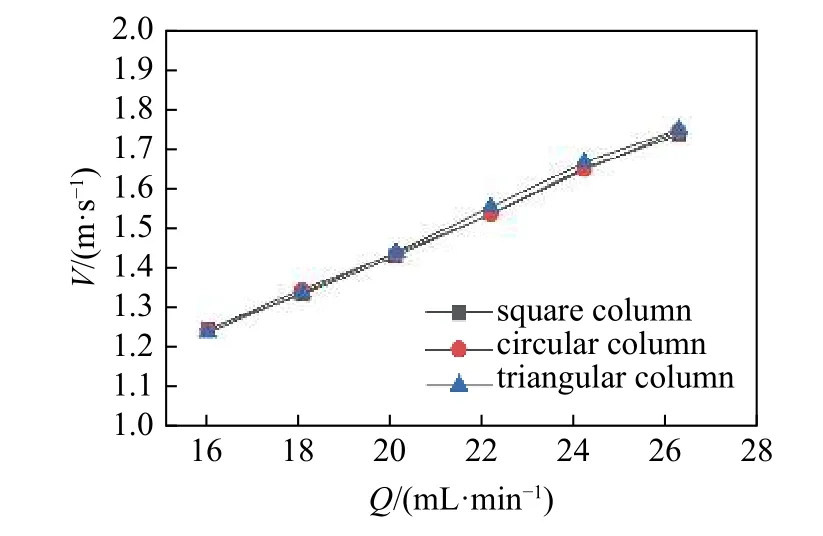
圖3 不同流量下的速度曲線Fig.3 Velocity curves at different flow rates
實驗在求解肥皂膜黏性系數和雷諾數時,利用文獻[18-19]中的單圓柱繞流實驗的Re-St擬合關系的經驗公式求解
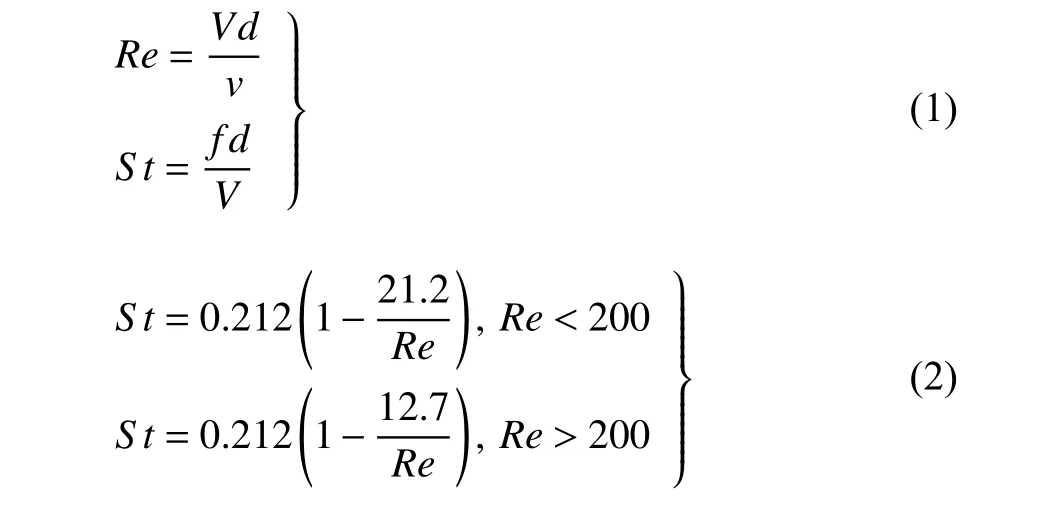
式中,f表示圓柱渦街脫落頻率,d為圓柱直徑,V為來流速度,v為流體的運動黏性系數.
為了更好的計算渦脫落的個數,采用直徑較大的圓柱,實驗采用的圓柱為d=10 cm,在V=1.43 m/s的條件下,測得其脫渦頻率f=29,并計算出相應的St=0.202 80,利用Re-St擬合關系經驗公式求出Re=300,最后利用雷諾數公式,計算出肥皂液在此流速下運動黏性系數為v=4.77 × 10-5m2/s.
肥皂膜的厚度也是肥皂膜實驗裝置關鍵的參數之一,不同的肥皂膜的厚度,干涉出的肥皂膜顏色不同,因此肥皂膜的厚度在實驗中應均勻一致,使得肥皂膜干涉的流場區域內顏色均一.該實驗肥皂膜厚度利用流量公式求解

式中,Q為流量,V為流速,L=14 cm 為肥皂膜試驗段寬度,B為肥皂膜的厚度.
如圖4 為肥皂膜速度和膜厚關系曲線,由圖可知,隨著速度的增大,肥皂膜的膜厚也逐漸增大.對比潘松和田新亮[20]的實驗結果,在同一流速下,本實驗肥皂膜的厚度較低,是因為該實驗肥皂膜試驗段的寬度L=14 cm,相比潘松肥皂膜試驗段的寬度大3 cm,所以在相同的流速下,該實驗肥皂膜的厚度較小,但具有相同的增長趨勢.
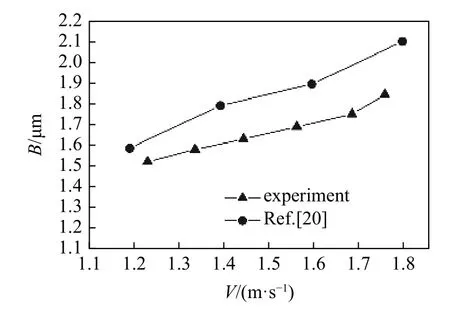
圖4 肥皂膜厚度與流速關系Fig.4 Relationship between the film thickness and the flow rate
2.2 實驗尾跡圖像采集
實驗分別采集了Re為160,220,275,480 和550下3 種鈍體的尾跡圖像,每種工況采集600 張時間序列的尾跡圖像,時間間隔為0.03 s(速度在1.41 m/s 每個尾渦脫落的時間間隔),15 種工況下共采集9000 張尾跡圖像作為數據集.如圖5,在V=1.41 m/s,Re=295 時,圓柱、三角柱和方柱3 種鈍體產生的尾跡.

圖5 典型鈍體繞流尾跡圖像Fig.5 Image of wake around a typical blunt body
從典型鈍體繞流尾跡圖像中可以看出,在流動過程中,隨著逆壓梯度的增加,肥皂液流體邊界層在鈍體表面開始分離,經過一段距離的發展,可以清晰地看到兩排平行而方向相反的尾渦結構,并按照一定的間距在空間交錯排列,該結構為卡門渦街.這3 種鈍體渦脫落之間的距離相近,即對于相同特征長度、不同形狀鈍體的尾跡結構相似,僅靠人眼從尾跡結構圖像分辨產生尾跡對應的鈍體類型和時下的雷諾數是不易的.
3 卷積神經網絡識別模型
3.1 卷積神經網絡
卷積神經網絡[21-25]是深度學習的一種算法,它充分利用局部相關性和全值共享的思想,大量地減少網絡的參數量,提高訓練效率,其強大的特征提取能力使它在圖像識別方面尤為突出.卷積神經網絡一般由輸入層、卷積層、池化層、全連接層和分類層組成[26].該網絡主要功能是特征提取和識別,卷積層和池化層用于提取深層次的特征信息,全連接層和分類層構成識別分類模式,通過全連接層將圖像轉化為一維向量,最后由分類層輸出圖像所屬類別[27].
3.2 尾跡識別分類模型
分析卷積神經網絡原理之后,提出基于卷積神經網絡的尾跡識別模型,輸入信息是不同鈍體形狀下采集的尾跡圖像,輸出是鈍體形狀或雷諾數的預測值.搭建的網絡結構如圖6 所示,主要結構是卷積層,池化層,全連接層組成.由文獻[28]可知卷結核越小,深度相對越深,模型性能越好,該模型的卷積核大小為5 × 5,神經網絡層數共11 層,即卷積層和池化層各4 層,全連接層2 層,參數采用金字塔架構(網絡結構的特征數目按倍數增加),更能有效利用計算資源.網絡模型結構中的dropout 的作用[29-30]是按照一定的比例隨機剔除部分神經元個數,有效防止過擬合現象[31-32],該比例設置為0.5,其他具體的參數設置如表1 所示.

圖6 尾跡識別CNN 模型Fig.6 CNN model for wake recognition
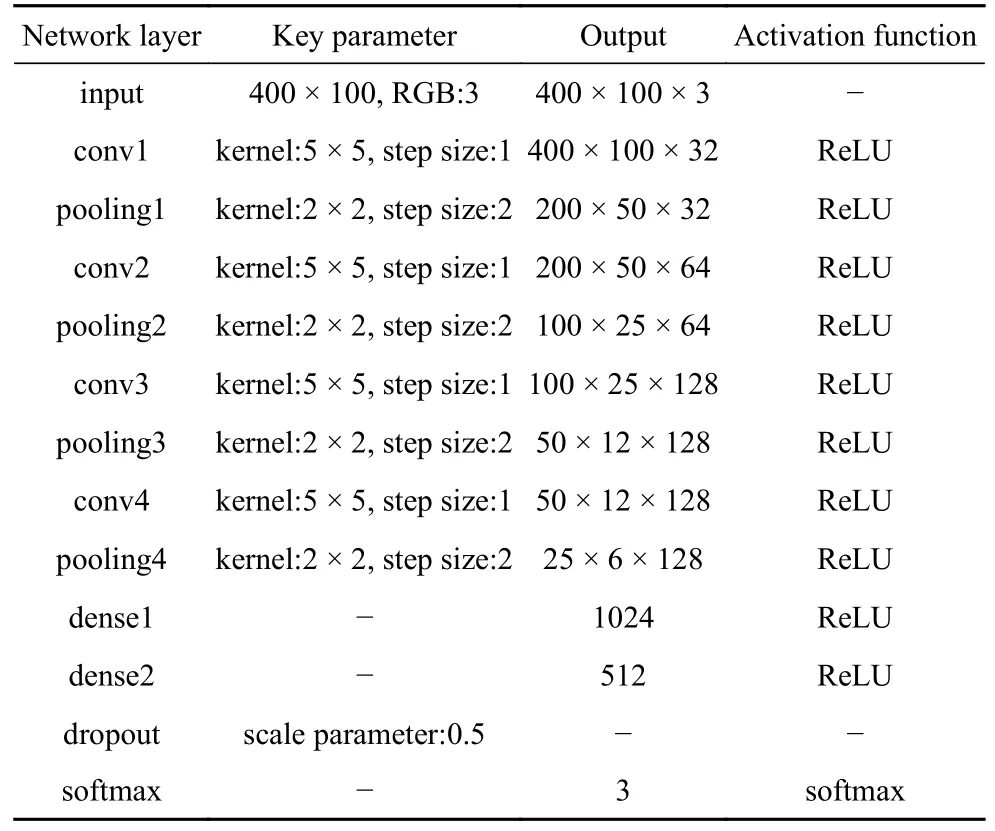
表1 CNN 網絡結構參數Table 1 CNN network structure parameters
尾跡分類識別是一個多分類問題,故損失函數采用多分類交叉熵損失函數,其表達式為

式中,N為數據樣本數,M為鈍體類別數量,yic為指示變量,預測類別與樣本類別相同取1,反之為0;pic為樣本預測類別的概率,由softmax 層輸出.
4 實驗及分析
4.1 模型識別的流程
通過豎直肥皂膜實驗,采集5 種不同雷諾數下3 種鈍體的尾跡圖片,實驗依據尾跡圖像采集方法進行采集.然后按照如下步驟進行數據處理和模型訓練,首先為保留圖像視野內全部為尾跡結構,將尾跡圖像統一調整像素大小為400 × 100,然后按照訓練集,驗證集和測試集比例為4:1:1 劃分數據集,其中驗證集和測試集均未參與模型訓練,僅用于評價模型的優劣,再根據模型參數建立卷積神經網絡模型并導入圖像開始訓練,最后利用混淆矩陣顯示測試結果.如圖7 所示,卷積神經網絡訓練的流程.
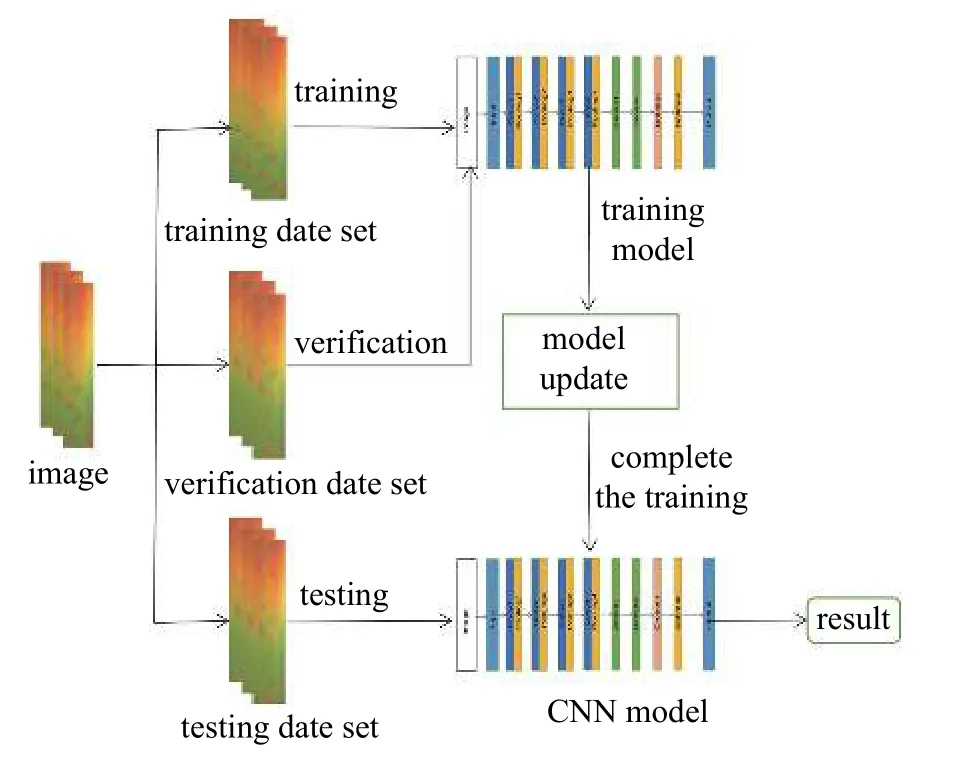
圖7 CNN 流程圖Fig.7 Flow chart to establish the CNN model
4.2 相同雷諾數尾跡識別結果分析
實驗按照每間隔0.03 s 采集一次尾跡圖像,采集Re=275,特征長度為10 mm 的三角柱,方柱,圓柱的尾跡圖像各600 張,共1800 張尾跡圖像作為數據集,任取其中1500 張(每種鈍體尾跡圖像各500 張)導入CNN 中進行訓練,學習速率0.001,迭代次數為120 步.剩余的300 張作為測試集用于評價模型優劣.圖8 給出了卷積神經網絡的損失函數值和驗證集正確率,由圖可知在模型開始迭代,損失函數值快速下降,在迭代15 步時,損失函數值開始收斂并趨于0.而驗證集的正確率,通過圖像可知迭代40 步時,正確率逐漸趨于1.
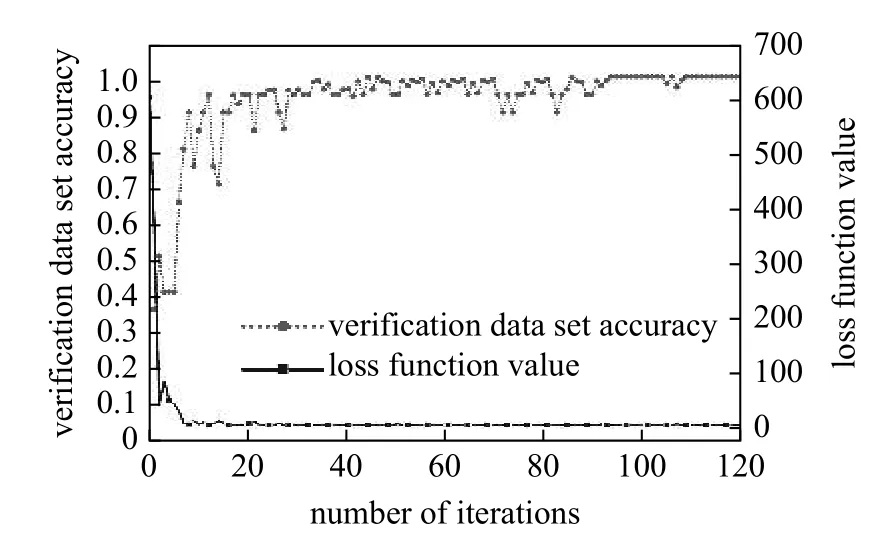
圖8 卷積神經網絡的損失函數值和驗證集正確率Fig.8 Loss function value and verification data set accuracy of the CNN
模型訓練后,對該模型進行圖像識別測試實驗,將測試集300 張尾跡圖像導入模型進行評估,運用混淆矩陣顯示實驗結果,如圖9 所示,case1,case2,case3 分別表示方柱,圓柱,三角柱的鈍體尾跡識別情況.方柱正確識別率為98%;圓柱中正確識別率為98%;三角柱正確識別率為97%;整體效果來看,正確識別率為97.6%,該模型識別效果良好.
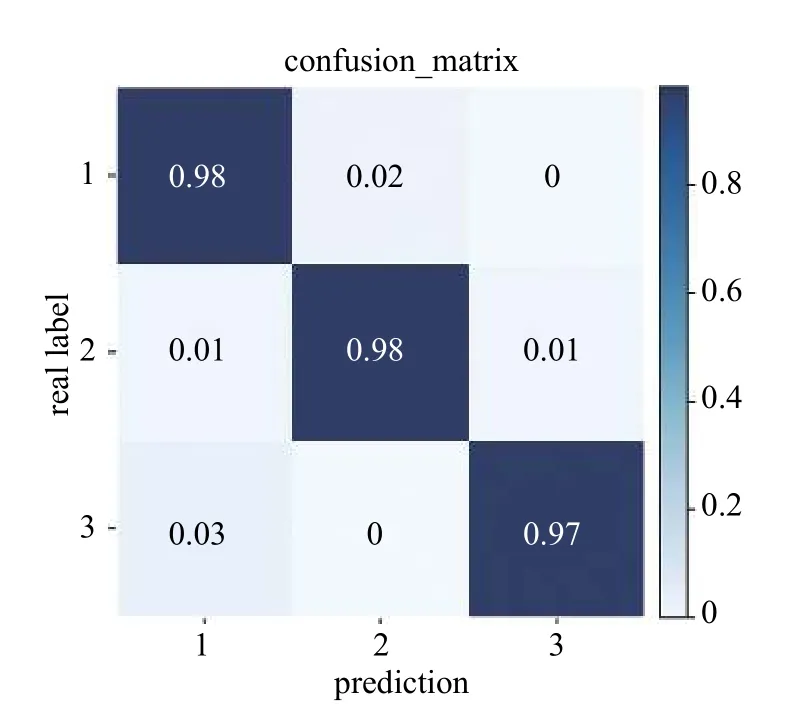
圖9 測試識別結果Fig.9 Test recognition results
為進一步驗證該網絡模型是否具有一定的魯棒性,對測試集300 張圖片進行處理,每張圖片進行裁剪至原圖像的80%大小,利用訓練的好的卷積神經網絡模型進行測試.實驗結果如圖10 所示,雖然每種鈍體實驗結果均有所降低,但識別的正確率均在90%以上,仍有較好的識別能力,驗證模型具有一定的魯棒性.
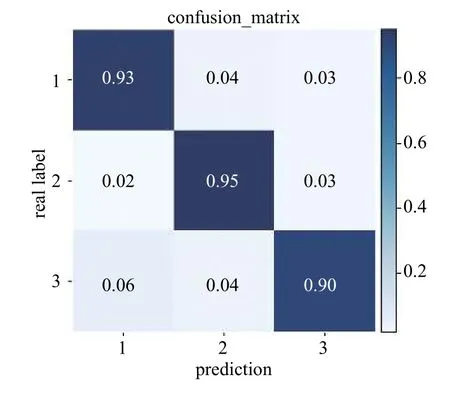
圖10 圖像裁剪后的識別結果Fig.10 Test image recognition results with reduction
4.3 不同雷諾數尾跡識別結果分析
通過4.2 可知,在相同雷諾數下的測試結果比較好,基于此,實驗又對不同雷諾數下的尾跡圖像進行訓練并測試,在Re為160,220,480 和550 下采集3 種鈍體的尾跡圖像,每種工況下采集600 張,共7200 張尾跡圖像,其中6000 張(每種鈍體每個雷諾數下各500 張)尾跡圖像導入卷積神經網絡模型中用于訓練模型.
模型訓練結束后,運用該模型識別測試集的1200 張圖像對應的鈍體形狀,用于評估模型優劣,實驗結果為圖11.圖中case1,case2,case3 分別表示方柱、圓柱、三角柱的鈍體尾跡識別情況.由混淆矩陣可知,三角柱識別的正確率最高為97%,且每種類型的識別準確率也均在95%以上;從整體效果來看,測試集的正確識別率為96%,體現訓練的模型具有學習雷諾效應的能力,對不同雷諾數下的尾跡圖像具有良好的表現效果.
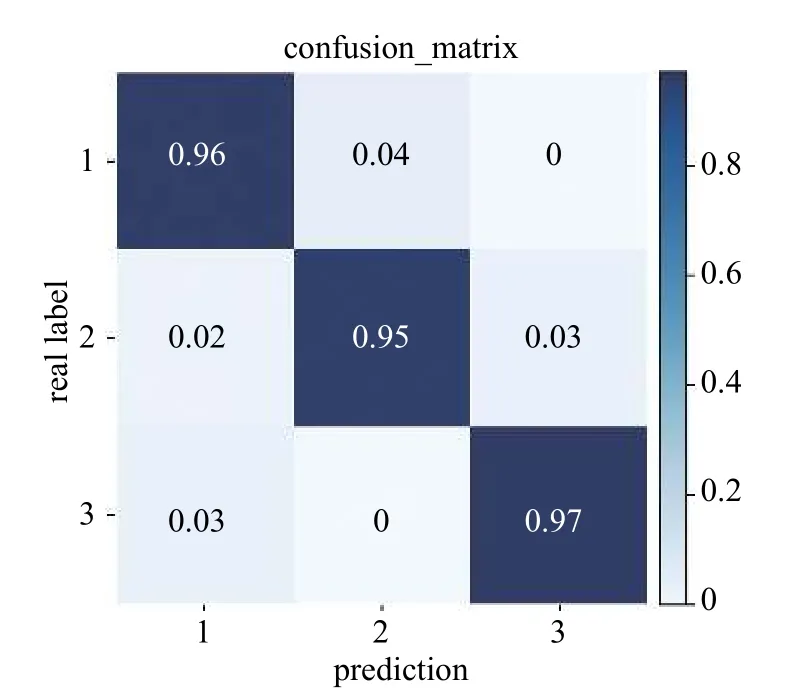
圖11 不同Re識別結果Fig.11 Different Rerecognition results
為進一步驗證模型對相近的雷諾數實驗工況的識別能力.把訓練好的不同雷諾數模型去識別Re=275 的實驗數據,識別結果為圖12,雖然較識別相同工況(圖11)的尾跡正確率有降低,但識別該雷諾數下的數據正確率均在93%以上,體現訓練的模型用于識別相近的工況,仍具有良好的識別能力,該模型具有一定的泛化能力.
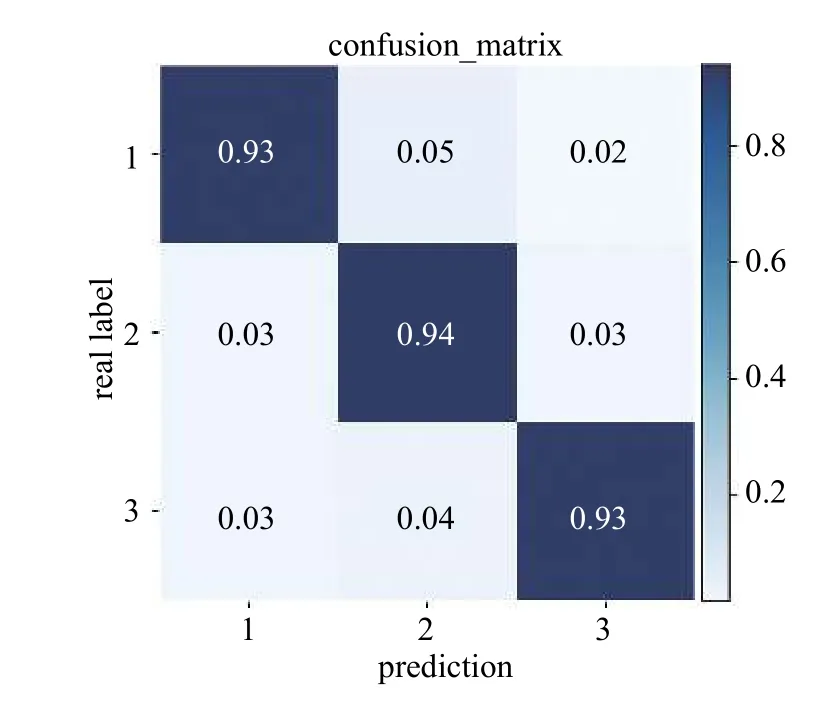
圖12 相近工況識別結果Fig.12 Identification results of similar working conditions
4.4 尾跡識別鈍體形狀和雷諾數
上述實驗均是通過尾跡圖像識別相應的鈍體形狀,僅涉及一個變量.為驗證該模型對多變量識別的能力,即通過尾跡圖像,識別出尾跡對應的鈍體形狀和雷諾數.接著又做了如下實驗,實驗工況如表2 所示,
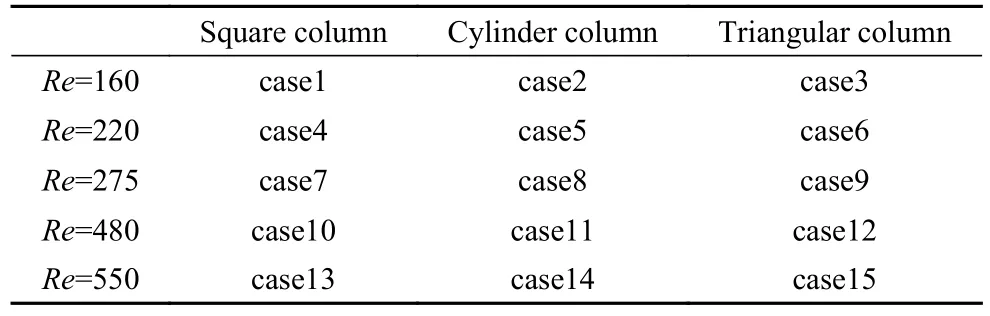
表2 實驗工況Table 2 Experimental conditions
在Re為160,220,275,480 和550 下采集3 種鈍體的尾跡圖像,每種工況下采集600 張,共9000 張尾跡圖像,其中7500 張尾跡圖像導入卷積神經網絡模型中,學習率為0.001,迭代次數為300 步.余下1500 張圖像(每種鈍體在每個Re下各取100 張)作為測試集用于評價模型優劣.
圖13 為卷積神經網絡的損失函數值和驗證集正確率,由圖可知在模型開始迭代,損失函數值快速下降,在迭代270 步時,損失函數值開始收斂并趨于0.001.而驗證集的正確率,通過圖像可知迭代100 步時,正確率逐漸趨于1.
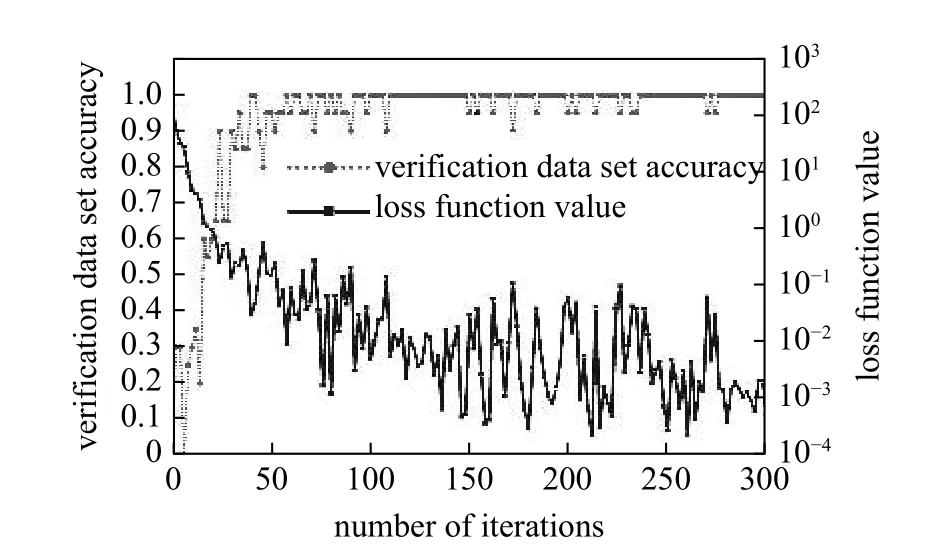
圖13 卷積神經網絡的損失函數值和驗證集正確率Fig.13 Loss function value and verify set accuracy of CNN
模型訓練結束后,運用該模型識別測試集的1500 張圖像(每種鈍體每個雷諾數下各100 張),實驗結果為圖14 所示,在識別鈍體形狀和雷諾數兩變量時,而在識別case6 和case9 的準確率最高為97%,識別效果最好.但識別case3 時,即Re=160,三角柱的尾跡,識別準確率最低為82%,通過混淆矩陣可知,識別錯誤的圖像多發生在同一雷諾數或相同的形狀下,原因可能是在這些條件下,尾跡圖像結構較相近,易混淆.另一方面,對于較大的數據量且類別比較多的識別問題,所建立的卷積神經網絡模型較簡單,可能使卷積神經網絡的深度不足,從而使網絡不能從尾跡圖像提取更深層次的特征結構,使得模型識別多變量問題時易出錯,導致模型識別性能變差的原因.從整體上來看,實驗識別混放1500 張尾跡圖片的準確率為91%,說明該模型用于由尾跡圖像,同時識別出尾跡圖像的雷諾數和產生尾跡鈍體的類型,仍具有不錯的識別能力.
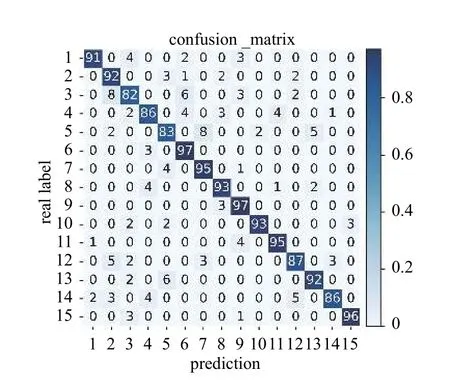
圖14 混放識別結果Fig.14 Mixed identification results
4.5 可視化分析
模型的識別效果在實驗數據上得到了初步驗證,但機器學習過程難以表達.為直觀理解 CNN 模型卷積層和池化層對尾跡特征的學習過程,采用tensorboard 對卷積池化后進行可視化.每層卷積池化后的圖像如圖15 所示,卷積層和池化層提取輸入圖像的邊緣、輪廓特征,可看成是邊緣檢測器,并把相似的特征合并起來,使得特征對噪聲和變形具有魯棒性,從圖上可看出,各層提取的特征以增強的方式從不同角度表現原始圖像,但是隨著層數的增加,其表現形式越來越抽象,特別在在第4 次卷積池化后,得到的尾跡圖像特別抽象,人眼已無法識別出尾跡圖片提取的哪些特征,僅有機器才能辨別其代表的特征含義.
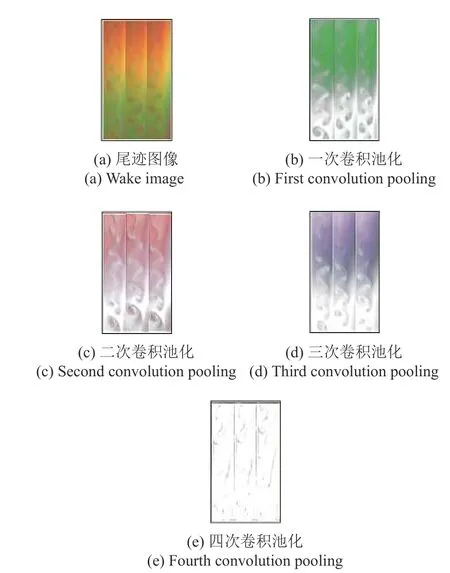
圖15 卷積池化過程Fig.15 Convolutional pooling process
5 總結
本文利用機器學習實現了從尾跡圖像中提取鈍體結構信息的設想,即建立的卷積神經網絡完成了對結構相近的肥皂膜尾跡圖像,能夠準確地識別出尾跡圖像對應的鈍體形狀和雷諾數.該方法為進一步利用人工智能提取流體尾跡中的物理信息提供了借鑒.具體而言,本文可得出以下結論.
(1)利用卷積神經網絡,建立了尾跡圖像與鈍體形狀之間的映射關系,該模型在相同雷諾數下,驗證300 張尾跡圖像的準確性為97.6%;該模型識別裁剪的尾跡圖像,即保留原圖像的80%,每種鈍體識別的正確率均在90%以上,仍具有較好的識別能力,說明該模型具有一定的魯棒性.
(2)對于不同的雷諾數尾跡圖像下,驗證不同雷諾數1200 張尾跡圖像的識別出鈍體形狀的準確率為96%,體現該模型具有一定的學習雷諾效應的能力.利用該模型識別相近雷諾數的尾跡圖像,同樣具有超過90%的準確率,說明模型具有一定的泛化能力.
(3)在識別鈍體形狀和雷諾數雙變量時,測試集結果表明網絡識別的性能一定程度上出現惡化,可能是卷積神經網絡結構相對簡單,深度不足等原因造成的.基于此,未來工作將繼續圍繞卷積神經網絡結構的改進等方面進行,同時考慮把時間維度信息導入模型中,從而進一步提高對多變量的識別精度.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
