氧化鋯口腔種植體的動態植入過程分析與設計1)
2022-03-19 01:55:18王天瑜牛一龍周健邦王曉飛邵麗華韓建民
力學學報 2022年1期
關鍵詞:設計
王天瑜 * 牛一龍 * 周健邦 * 王曉飛 邵麗華 *, 韓建民 **,
* (北京航空航天大學航空科學與工程學院固體力學研究所,北京 100191)
? (北京航空航天大學生物與醫學工程學院,北京市生物醫學工程高精尖創新中心,生物力學與力生物學教育部重點實驗室,北京 100191)
** (北京大學口腔醫院,國家藥品監督管理局口腔材料重點實驗室,口腔生物材料和數字診療裝備國家工程研究中心,北京 100081)
引言
種植牙是修復缺牙的首選方法,傳統牙科種植體通常由純鈦或鈦合金等生物相容的材料制成,通過外科手術將其植入頜骨以支撐假牙冠,來取代缺失的牙齒.但傳統的鈦種植體有著一些缺陷,如牙齦退縮或者牙齦較薄患者可透出鈦種植體的金屬色澤,使具有一定的美學缺陷[1];同時少部分患者可能對鈦金屬過敏,從而沒有可替代材料選擇[2].近年來,氧化鋯材料以其優異的生物相容性、機械性能以及美學方面的優勢而擁有替代鈦金屬成為新型牙種植體材料的潛力,并逐漸展現了其優勢[3].但是,長期的氧化鋯種植體的臨床隨訪觀察相對有限,缺乏足夠的關于種植體臨床應用的科學評價數據.因此,氧化鋯種植體的臨床實用性仍需要足夠的科學證據來證明[4-6].研究表明如果氧化鋯種植體設計、制造和植入正確,其5 年成功率可超過 95%[7-14].但氧化鋯種植體較高的斷裂發生率仍然是限制其廣泛臨床應用的主要障礙,因此如何通過改進氧化鋯種植體的設計、增加氧化鋯材料的強度和韌性,提高氧化鋯種植體的斷裂強度是其研究熱點,其中通過優化氧化鋯種植體的設計,開發適用于氧化鋯陶瓷材料的設計方式是提高斷裂強度減少臨床斷裂發生率的有效手段.近年來,國外對于氧化鋯種植體的研究逐漸深入并展開了臨床應用,但國內的氧化鋯種植體研究仍處于起步階段,面對國外的技術封鎖,研究出中國自己的氧化鋯種植體是一個面對解決人民生命健康問題的重要課題.
牙種植的基本過程包括切開牙齦組織,暴露其下牙槽骨,再用鉆頭逐級鉆出骨腔,之后使用人工或機械的方式將種植體植入[15-16].在植入過程中,控制植入的速度以及扭矩有助于減少骨折的發生和促進骨愈合.根據Wolff[17]的理論,骨頭在吸收或愈合方面的反應與骨頭內部的壓力直接相關.根據骨腔直徑與種植體直徑的關系,種植體的種植形式可以分為螺紋形成、螺紋切割、螺紋形成與切割3 種[18].如果骨腔的直徑比種植體的直徑小0.25 mm 以下,就會發生“螺紋形成”(S1)過程,此過程中種植體對于骨腔的擠壓程度遠大于切割程度.Sennerby 和Meredith[19]認為S1 過程中,骨頭的穩定性較差,從而增加了種植失敗的可能性.如果骨腔的直徑比種植體小0.25~ 0.6 mm 之間,就會發生“螺紋切割”(S2)過程,此過程中種植體對于骨腔的切割程度遠大于擠壓程度.如果骨腔的底部直徑小于頂部直徑,在植入過程中就會發生“螺紋形成與切割”(S3)過程,此過程中種植體對骨腔同時具有切割與擠壓過程.形成與切割發生的比例會影響到術后骨愈合的生物性反應,并最終影響手術的結果.
種植體的動態植入過程的力學分析比較復雜,使用有限元軟件如果進行全面的計算,其過程過于繁瑣,計算效率較低,試錯成本較大[20-21].針對此問題,Van Staden 等[22]研究了在將種植過程設定為一個離散過程而不是連續過程,以及植入時種植體不旋轉的過程,從而大大簡化了計算工作.本文將在此工作基礎上,主要針對一段式氧化鋯種植體進行研究.通過有限元軟件ABAQUS 建立了種植體及牙骨模型,模擬氧化鋯牙種植體的動態植入過程,并對植入過程進行優化.最后提出了氧化鋯種植體的自攻刃設計,并進行了優化.為自主生產氧化鋯種植體和臨床上種植條件提出了可行性方案.
1 材料與方法
本文主要通過有限元軟件ABAQUS[23]分別對骨組織和種植體進行建模與分析,具體如下所述.
1.1 骨組織建模
想要進行完整準確的骨組織建模,首先要確定人體口腔骨組織的組成形式.這里以下頜骨為例,下頜骨與人體大多數其他骨骼一樣,其結構主要分為松質骨和密質骨,松質骨占人體骨質量的20%,但構成骨表面的80%.松質骨的骨密度低于密質骨,并更具彈性;松質骨的支架結構有助于保持骨骼形狀.因此在進行骨組織的有限元建模時,要考慮將密質骨與松質骨分開建模,并賦予不同的力學性能參數.二者類似于嵌套的關系,其有限元模型如圖1 所示.
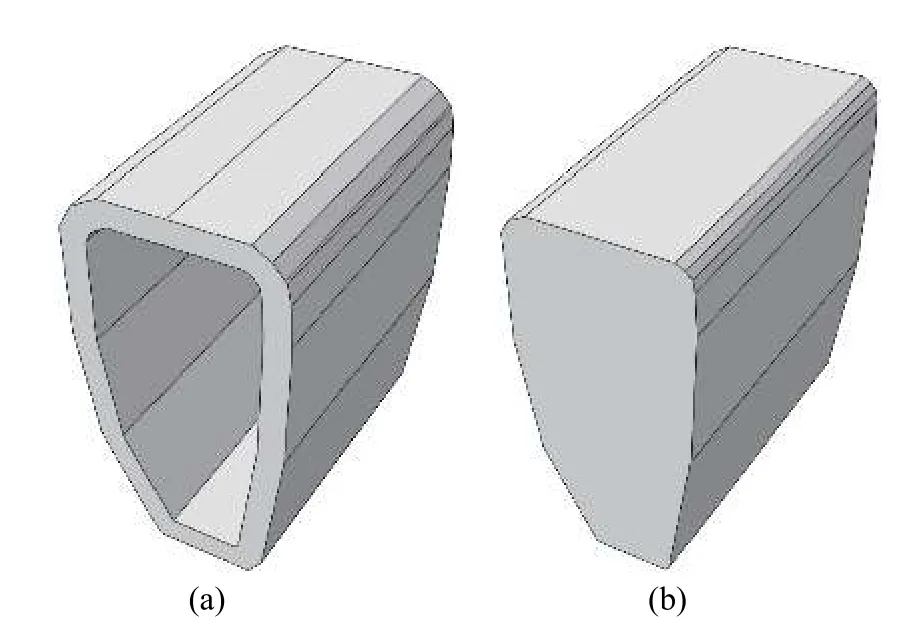
圖1 (a)密質骨與(b)松質骨有限元建模Fig.1 Finite element modeling of (a) the compact bone and(b) cancellous bone
在劃分網格的過程中使用線性四面體網格,分別使用3 種密度的網格劃分,其節點數分別為158 145,34 680,7636.嘗試后發現第1 種高密度網格雖然計算更為精確,但計算時間過長;而使用第3 種低密度網格時,其數值梯度較大,網格呈逐漸發散的趨勢,多處網格出現奇異現象;因此最后選取較為合適的網格密度并多次提高網格質量,保證在此網格劃分方式下,在一定的范圍內變化網格密度,其結果大致相同.單元數為184 633,節點總數為34 680,使用的網格類型為C3 D4,由于骨組織被施加了完全固定約束(將在1.3 節中具體說明),其邊界節點自由度為0,總自由度為98 040.針對極少部分位置出現的奇異而導致無法收斂的情況,取用其應力值的95%分位數作為最終輸出數據.
將二者裝配后,并通過布爾操作設置一盲孔作為骨腔,作為之后動態植入過程的路徑.如圖2 所示,對于S1 與S2 過程,盲孔的上下端直徑相等,為一柱狀孔,其中S1 過程孔直徑為3.7 mm,S2 過程孔直徑為3.4 mm.結合種植體的下端直徑為3.8 mm,由引言中對于S1,S2 過程的定義,此時會分別發生螺紋形成與螺紋切割過程.對于S3 過程,盲孔的上下直徑并不相同,上端直徑為3.7 mm,下端直徑為3.4 mm,此時會發生螺紋形成與切割過程,即螺紋形成與螺紋切割成比例存在于植入過程中.本文所有長度單位均為毫米.大量研究和實驗結果表明[24-25],皮質骨和松質骨在受載時的力學響應主要可分為兩個部分:首先是在受載初期骨組織應力隨應變線性增加的線彈性階段,在該階段內進行卸載,骨組織的應力與應變仍保持正比關系,且變形完全消失;其次是骨組織在達到屈服應力之后發生硬化或軟化等不可逆變形的階段.因此,本研究中將骨組織作為彈塑性材料進行處理.其符合小變形假設與無初應力假設,認為其在外載作用下所產生的變形遠小于物體原本尺寸,并且在外力作用之前,物體內各點的應力均為零.皮質骨與松質骨相應的力學性能參數如表1所示.
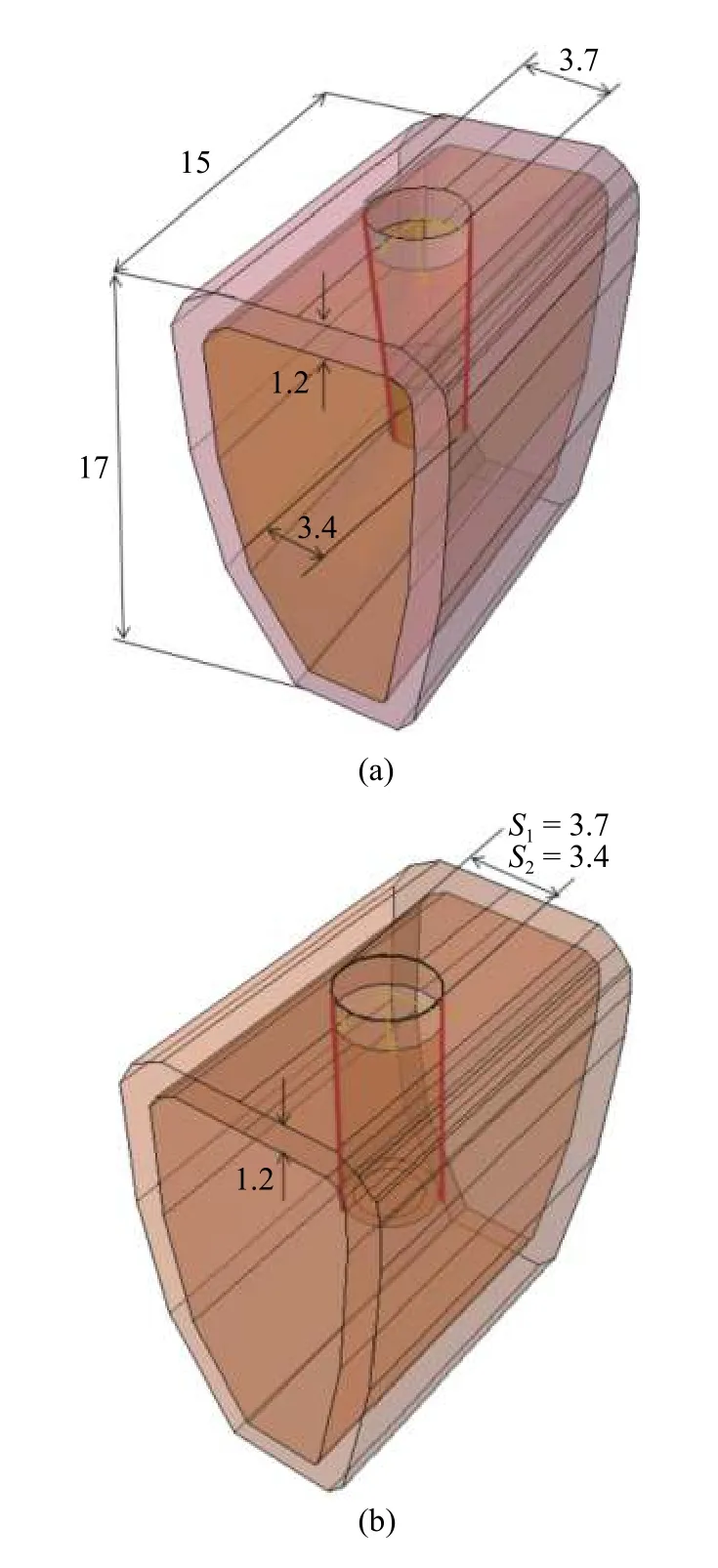
圖2 (a) S3 骨組織裝配圖與(b) S1,S2 骨組織裝配圖 (單位:mm)Fig.2 Schematic plot of (a) model S3 and (b) that of S1 and S2 (unit:mm)

表1 骨組織模型的力學性能參數Table 1 Mechanical parameters of the bone tissue model
1.2 種植體建模
參照已有的鈦或鈦合金牙種植體[28-29],并考慮到氧化鋯材料的特性,對氧化鋯種植體金屬參數化建模,并重點關注以下參數:螺紋處圓形橫截面的直徑、種植體各段圓柱的長度、種植體內螺紋的深度,以及螺紋螺距、螺紋截面—包括頂高、螺紋截面頂部長、螺紋截面根部長、最高點距離兩邊最低點的距離,和螺紋的牙型斜角即螺紋截面形狀兩條側邊關于橫截面的夾角[30-31].
在建模過程中很重要的一個方面就是螺紋的設計,參照市面上一些較為成熟的鈦合金類種植體設計,如圖3 所示,螺紋部分由以下幾個參數控制:螺紋高0.4 mm,螺距0.8 mm,底部距離0.3 mm,圓弧1 半徑0.06 mm,圓弧2 半徑0.45 mm,圓弧3 半徑0.15 mm,圓弧4 半徑0.08 mm.
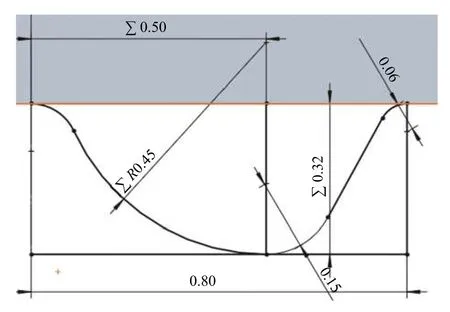
圖3 局部螺紋示意圖Fig.3 Schematic diagram of partial thread
在整體建模設計優化中,參考已有的鈦合金一段式種植體掃描體進行建模.由于一段式種植體實際設計時往往是制式的[32-33],具有多種型號,因此選取了市面上較為常用的直徑為4.1 mm.傾角部分參考工程上的一種國際標準“莫氏錐度”進行設計.所建模型如圖4 所示,各項力學性能如表2 所示.

圖4 種植體模型Fig.4 Implant model
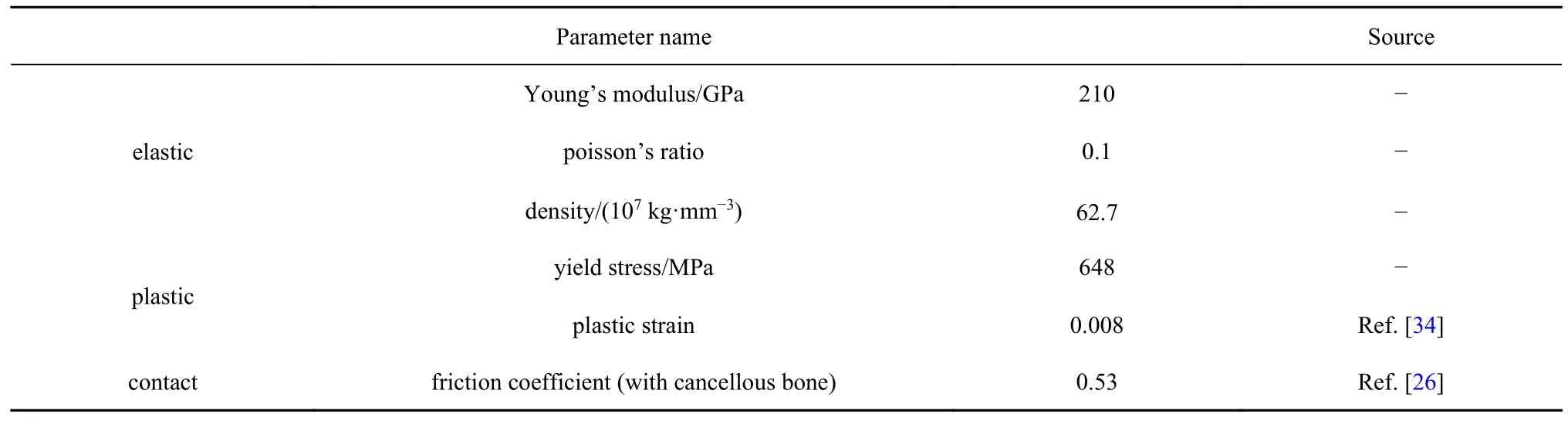
表2 種植體模型的力學性能參數Table 2 Mechanical parameters of the implant model
1.3 仿真中載荷以及邊界條件設定
種植體的植入方式可以分為人工植入與機械植入.已有學者對人工植入過程進行了建模分析,這種方法要求隨著時間的增加而逐漸增大對種植體的扭矩[35].本文研究的則是機械植入方式,即植入過程是在恒定扭矩下連續進行的.
圖5 中展示了植入過程中施加在種植體頂部的450 N·mm 恒定扭矩以及0.39 mm/s 的速度.此外,需要注意的是,雖然植入深度為11.6 mm,但是骨組織上預先開放的骨腔深度為12 mm,因此植入后仍可保留0.4 mm 的深度.在臨床中,這0.4 mm 的深度可以儲存血液與骨頭碎片.
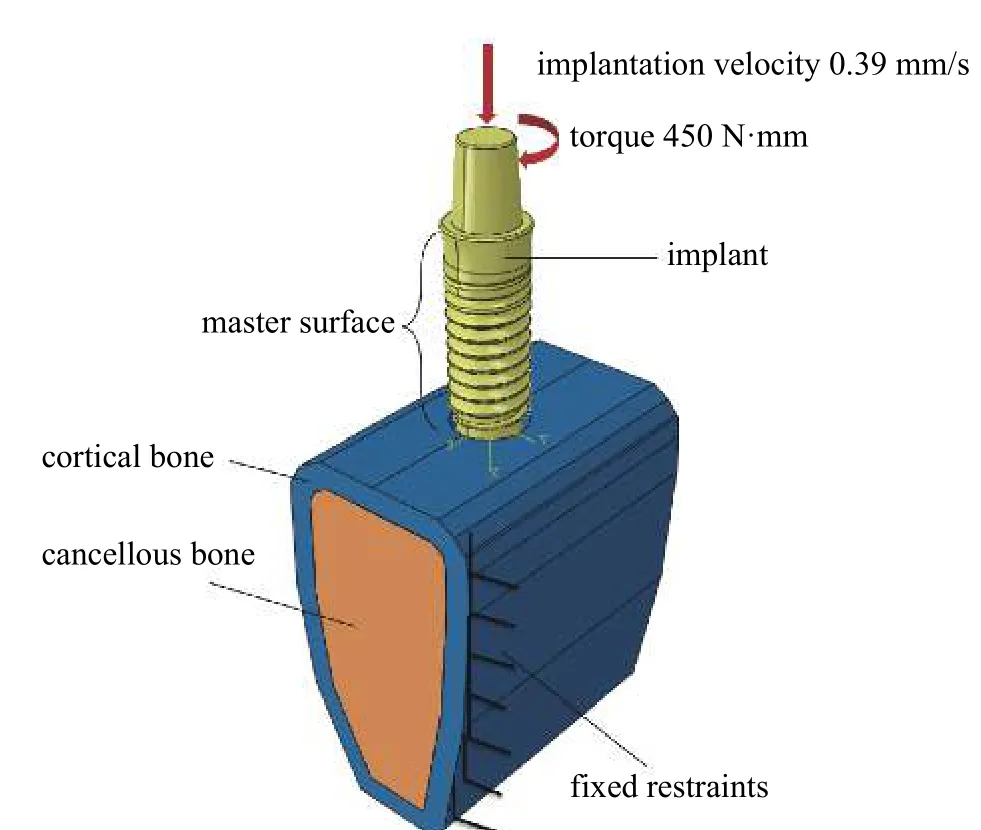
圖5 有限元仿真示意圖Fig.5 Schematic diagram of finite element simulation
在植入的動態模擬過程中,骨組織與種植體之間的相互作用是復雜的[34],因此在仿真中需要定義二者之間的接觸關系.在本研究中,使用了ABAQUS中的“表面與表面接觸”(surface to surface)的離散化處理方法去模擬接觸條件.因為這種方法比“節點與表面接觸”(node to surface)方法提供的應力解更為精確.如圖5 所示,這兩個接觸表面的定義是設置側面和底部植入表面作為主表面;如圖6 所示,從表面包括空腔的整個內表面和密質骨表面上0.5 mm 寬的頂環面.在大變形下ABAQUS 會默認從表面被主表面的節點穿透,因而在發生變形后,從表面的材料特性定義將不再準確.因此,必須使用自適應網格技術,以便從表面網格與材料在模擬植入過程中始終一起移動,由此盡可能防止網格出現大畸變.圖5 也顯示了在有限元仿真過程中沿著假設的人類下頜骨近中遠端方向的骨表面的固定約束.
骨內的應力水平被認為是植入過程中骨折和隨后骨吸收的決定因素.von Mises 應力可以沿松質骨中的VV 方向和密質骨中的HH 方向進行測量,如圖6 所示.其中,VV 方向的起點和終點分別是VV1與VV2,HH 方向的起點和終點分別是HH1 與HH2.
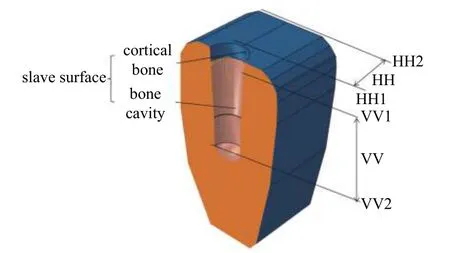
圖6 松質骨與密質骨的應力測量方向設定Fig.6 Setting of the stress measurement direction of cancellous bone and compact bone
2 結果與討論
Guan 等[18]發現,在S1 過程中,松質骨內的應力水平較低,穩定性較差,不利于后期骨愈合;在S2 過程中,由于切割現象的比例較大,因此松質骨內的應力水平較高,可能會對骨頭造成損壞.因此本文對于無自攻刃設計的種植體的動態植入過程,僅進行了S3 過程的分析.在確定了自攻刃設計后,對于具有較好的自攻刃設計的種植體分別進行了3 種過程的仿真分析.
在植入過程中評估松質骨與密質骨的von Mises 應力水平.在評估松質骨時,選擇了沿松質骨深度的VV 方向.在進行有限元仿真時,將網格按深度(VV1 方向)分組,并分組輸出結果,通過后處理軟件即可以得到von Mises 應力-深度曲線.
2.1 無自攻刃設計種植體的動態植入過程結果與分析
參數化建模模型的種植深度為11.6 mm,種植速度為0.39 mm/s,因此植入時間設定為30 s.分別取植入時間的15 個時間點:2 s,4 s,6 s,8 s,10 s,12 s,14 s,16 s,18 s,20 s,22 s,24 s,26 s,28 s,30 s,分析松質骨內的應力水平曲線如圖7 所示.
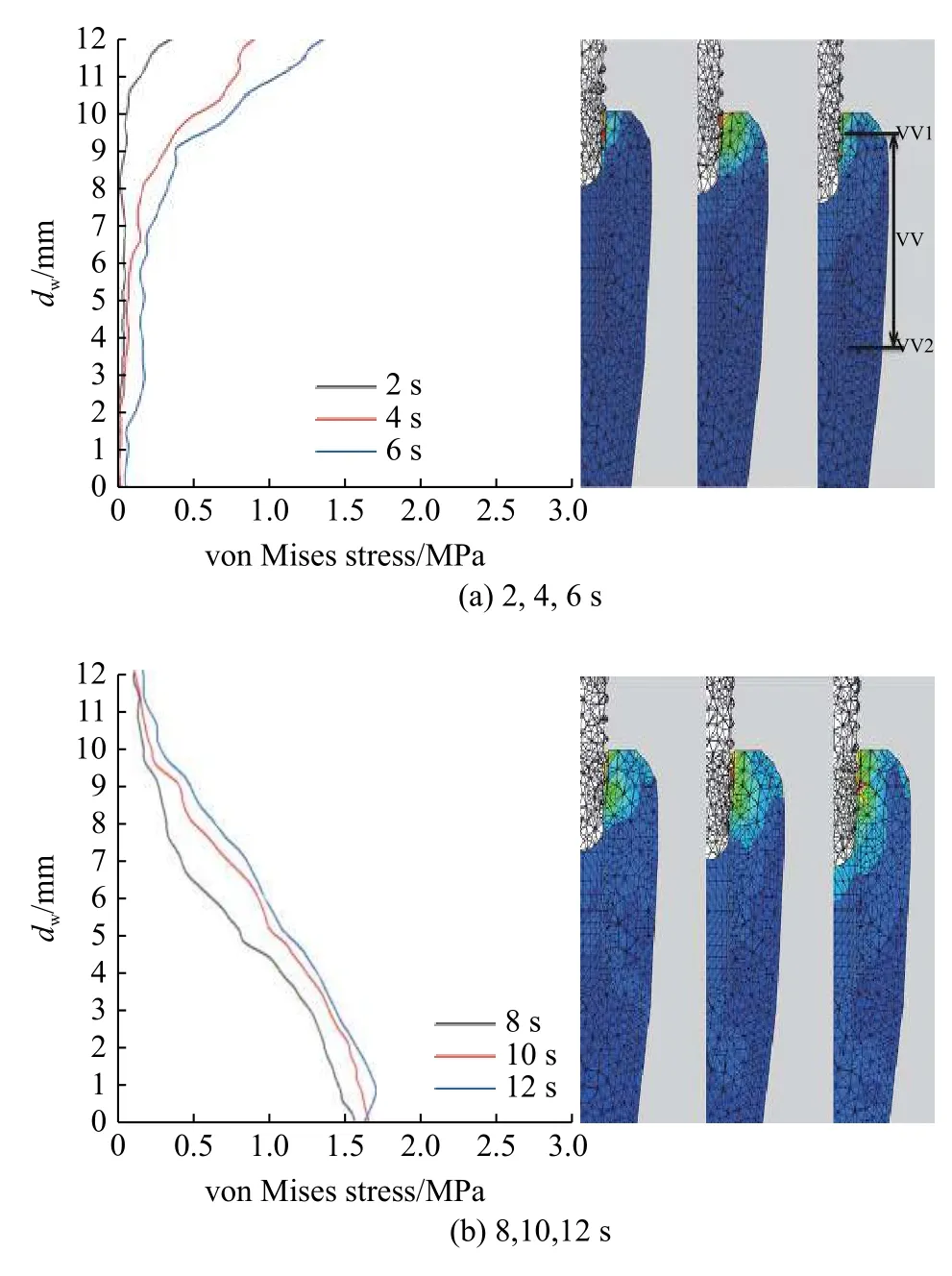
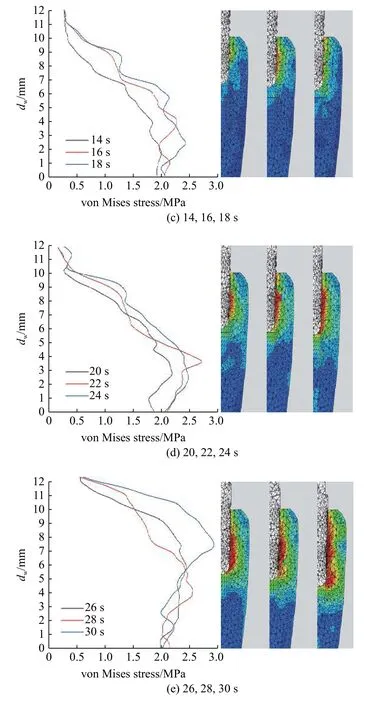
圖7 松質骨內應力-dw 圖線Fig.7 Cancellous bone internal stress-dw graph
由圖7 可見,隨著種植體的植入深度dw增加,松質骨內的應力水平總體是呈現上升趨勢的.這是由于隨著種植體的深入,骨組織與種植體之間的接觸面積增大,因此更多的扭矩被轉移到了骨組織上.如圖7(a)所示,在植入時間為2 s 也就是植入深度為0.78 mm 時,種植體與松質骨并未直接接觸,因而此時松質骨內應力水平較小.在這一階段,松質骨內所產生的應力主要是通過密質骨轉移而來的.同時可以發現,當螺紋直接接觸到骨組織時,此時會產生應力的峰值,這是由于螺紋頂端處產生了應力集中現象.如圖7(b)所示,隨著種植體的深入,應力水平呈現增加的趨勢,同時在松質骨低深度處的應力水平逐漸趨于平穩,這是由于種植體更多地接觸到了骨組織,使其應力分布更加平均.總體來說,隨著種植體的深入,這一階段的應力水平略有增加.如圖7(c)所示,隨著種植體的深入,最大應力水平不再呈增長趨勢,而是逐漸穩定在了2.1 MPa 左右.同時可以觀察到,在某一固定的時間點,應力水平并不一定是沿著VV 方向逐漸減小的,而會在一定范圍內出現增加再減小的趨勢,這是由于螺紋結構的復雜性以及螺紋頂端發生應力集中而導致的.圖7(d)展示了在植入時間為22 s 也就是植入深度為8.58 mm 時,在深度為3~ 4 mm 的范圍內,出現了應力峰值,且此峰值相較于其他深度的峰值較大,即應力出現了突變.考慮出現此現象的原因仍為種植體的螺紋頂端出現了應力集中現象.而針對此應力值的突變現象,在后面分析損傷時應對此時間點此深度的骨組織應力應變水平進行著重分析.圖7(e)描述了種植體在種植過程中的最后階段,著重關注植入時間為30 s 也就是植入結束時的曲線.可以看到在深度為7~ 8 mm 的位置出現了應力峰值,且此峰值較大,結合應力云圖,考慮此處可能出現了骨組織的損傷,但仍要到后面的損傷部分結合應力的具體最大值與應變水平進行具體分析以確定是否出現了損傷現象.
前述分析了植入過程中松質骨中的應力變化,而如果要分析骨損傷與骨吸收,還需要得到骨組織內最大應力與最大應變的準確數值.通過ABAQUS的后處理輸出文件,得到了松質骨內的最大應力與最大應變,如表3 所示.

表3 松質骨內最大應力與最大應變Table 3 Maximum stress and maximum strain in cancellous bone
在種植過程中,局部骨組織所承受的理想應力水平尚未有定論.松質骨的特殊結構使其相較于密質骨更容易發生骨折現象.Reiger 等[34]的研究指出,如果應力水平低于1.72 MPa,骨組織受到的刺激可能不夠充分而導致術后骨愈合的速率與效率較低.
如果應力水平超過2.76 MPa,可能會發生骨吸收現象,導致種植體松動或增加潛在的失效風險.因此,松質骨內應力水平應保持在1.72~ 2.76 MPa之間.而O’Mahony 等[35]指出,可以從最大應變的角度去分析松質骨組織的損傷問題,相關數據如表4所示.
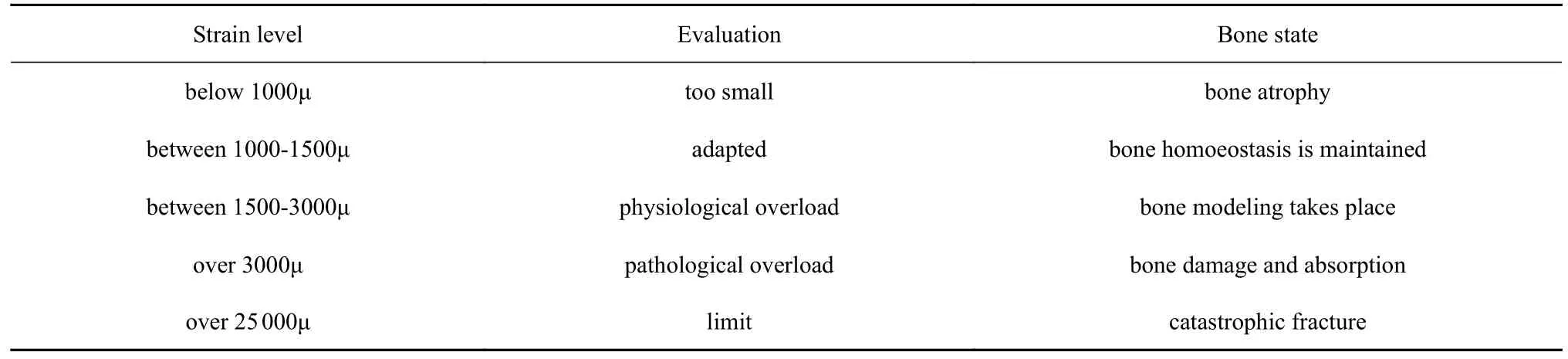
表4 按應變水平考慮骨組織狀態[34-35]Table 4 Consider the state of bone tissue according to the strain level[34-35]
其中,骨萎縮是指由外傷引起的反射性交感神經營養不良綜合征,也稱為創傷后骨萎縮[36].骨萎縮會導致骨不愈合的發生,因此應避免應力應變水平過小.骨塑建是指在生長期間骨骼的生長和變化,并適應成年期調整骨結構和骨質量分布以適應外力環境的變化,作為生理超負荷的現象之一,骨塑建也是需要避免的.
根據表3 中松質骨內最大應力與最大應變情況,可以發現其數值基本都在安全的范圍之內且接近上限,這對于骨組織的刺激更大,也有助于術后的骨愈合反應.但是,在種植體完全植入后的最大應力為2.84 MPa,最大應變為1.582‰,分別超過了安全范圍的上限2.76 MPa[36]與1.500‰,因此可能會使骨組織生理超負荷從而出現骨塑建反應.這一現象也許因為上述種植體模型無自攻刃的設計,仿真過程中網格由于過度擠壓造成的大畸變而導致的,因此合理的自攻刃設計是必要的.
2.2 含有自攻刃的種植體
具有自攻性的種植體在種植過程中不需要攻絲,在擴孔之后就可以直接進行植入,減少了手術步驟與時間成本,同時增加了可靠性,提升了機械穩定性,對種植后期的生物穩定性的提升也有一定的幫助[37-39].
參考市場上已有的一些較為成熟的鈦種植體的自攻刃設計,并考慮到氧化鋯材料的特性,設計了如圖8 與圖9 所示的3 種有自攻刃的種植體.目前含有自攻刃設計的鈦種植體的設計已成熟,其自攻凹槽的設計也已有制式.A,B,C 3 種自攻刃設計種植體參考了鈦種植體上常用的3 種自攻設計,并加以優化設計而成.其區別主要體現在對于種植體下端切割了形狀不同的自攻凹槽.其中設計A 與C 的凹槽形狀較為類似,均為邊緣切割型凹槽.而設計B 的凹槽形狀則為碗型.相比而言,設計A 與C 的切割能力更強,而設計B 則在實際應用中更有利于骨碎片與血液的排放.將鈦種植體中的自攻刃設計應用到氧化鋯種植體上是否合適,需要進行動態植入過程分析來確認.
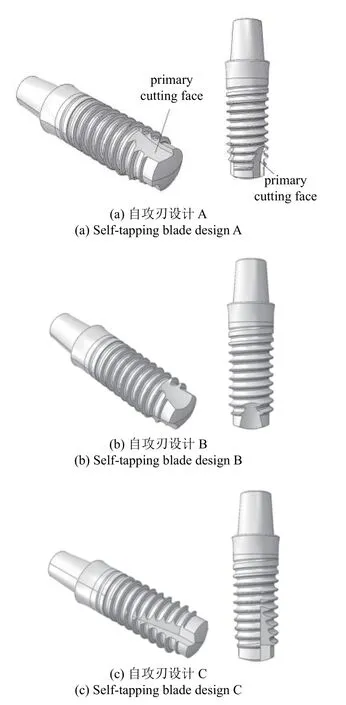
圖8 含有自攻刃設計的種植體Fig.8 Implant with self-tapping blade design
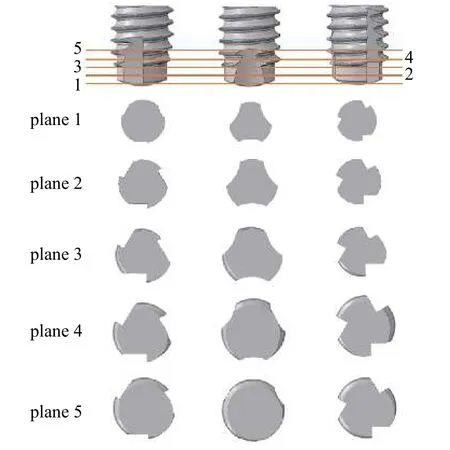
圖9 自攻刃設計種植體剖面圖Fig.9 Profile of self-tapping blade design implant
進行動態植入過程分析,得到的種植過程中松質骨內的最大應力-應變水平如表5 所示.與表3 中的數據對比可以發現,含有自攻刃設計的種植體模型在種植初始階段,松質骨內的最大應力與最大應變增加的速度較快.在相同的植入時間段,相較于沒有自攻刃設計的種植體,含自攻刃種植體的應力應變水平均較大.在種植的后半階段,含有自攻刃種植體的種植過程中松質骨內應力-應變水平趨于穩定,并小于無自攻刃設計的種植體的應力-應變.在種植結束后,含有自攻刃設計的種植體松質骨內的最大應力與最大應變基本均在安全的范圍內,相較于無自攻刃設計的模型有了一定的優化.分析其原因,是因為擁有自攻刃的種植體在植入過程中切削現象更為明顯,雖然會有明顯的應力集中,但是相較于沒有自攻刃設計的種植體,其擠壓的情況會減少,網格不易出現較大的畸變,因此在種植結束后,松質骨內的應力應變水平減小了.

表5 3 種自攻刃設計種植體種植過程中松質骨內最大應力與最大應變Table 5 The maximum stress and maximum strain in the cancellous bone during implantation of three self-tapping blade designs
將3 種自攻刃設計的種植體的松質骨內最大應力-應變隨種植深度變化情況進行對比,分別如圖10與圖11 所示.
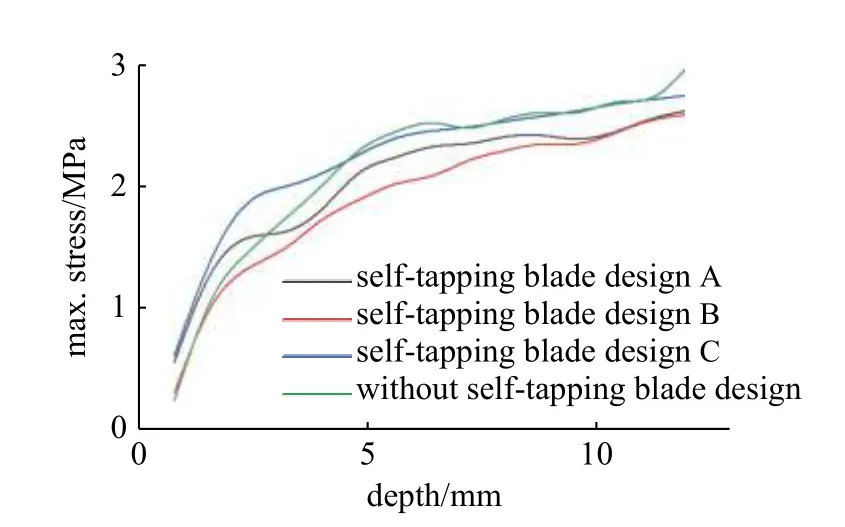
圖10 松質骨內最大應力隨深度變化圖線Fig.10 The maximum stress in cancellous bone versus depth
Wu 等[40]認為,種植體在植入過程中的初期穩定性與骨組織內的應力應變水平、種植體在骨組織內的保持力、以及種植體對骨組織施加的扭矩均有關系,并且以上幾點因素之間有著很強的相關性.因此可以用骨組織內的應力應變水平分析種植過程中骨組織的初期穩定性.結合表5 的數據可以看到由于在幾何設計方面自攻刃設計C 具有較強的切削能力,松質骨內的最大應力應變水平也較大,并且在完全植入后超過了安全區間的上限,在這種情況下,骨組織很有可能出現損傷的情況.而自攻刃設計A 與B 均在適合區間內.Sullivan 等[41]認為,在一定的范圍內,骨組織內的初期穩定性以及術后的骨愈合效率與種植過程中骨組織受到的種植體施加的扭矩變化梯度有關.種植體施加的扭矩變化梯度越大,骨組織的初期穩定性越差,術后的骨愈合效率越低.而由于骨組織受到的扭矩與種植過程中的應力應變有很強的相關性,因此對于應力-應變,該規律也成立.從圖10 與圖11 中可以觀察到,相比較而言,自攻刃設計A 在種植初期,其應力應變變化的速率較快,即應力應變梯度較大,這不利于種植的初期穩定性.自攻刃設計B 的應力應變曲線則更為平滑,因此在種植過程中穩定性更好,術后的骨愈合效率也更高.并且考慮到氧化鋯為脆性材料的特點,以及加工時的難度、成本問題,碗型的自攻刃設計B 在工程上更好加工,并且相較于設計A 與C,其尖端更少,應力集中現象會更少,因此更不容易破壞或發生脆性斷裂.再加之碗型的設計在實際種植過程中對于骨碎片與血液有更好的排放作用.因此含有自攻刃設計B 的種植體設計最為合理.
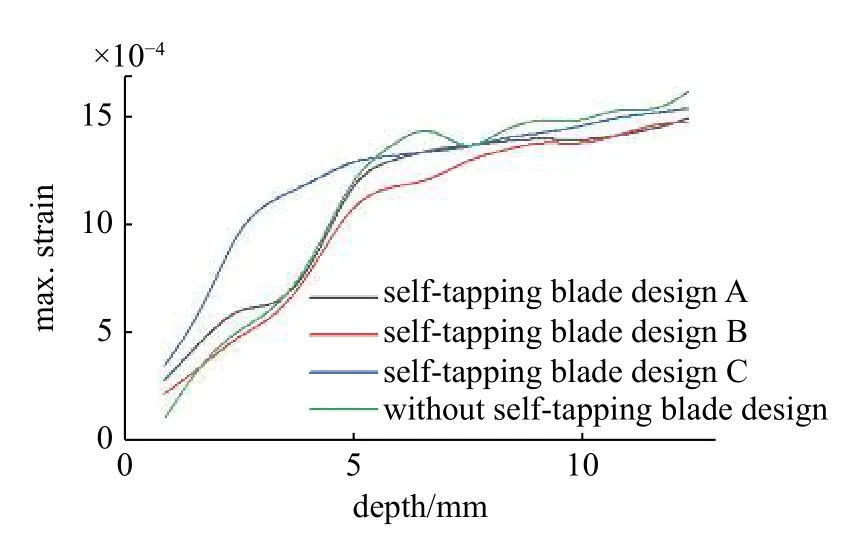
圖11 松質骨內最大應變隨深度變化圖線Fig.11 The maximum strain in cancellous bone versus depth
本文主要針對骨組織的受力情況與損傷分析,在仿真過程中為了降低試錯成本,將種植體設置為剛體.在未來的工作中,為了設計更好地適用于氧化鋯種植體的自攻刃結構,并進一步對種植體的整體設計進行優化,則需取消對種植體設置的剛體約束,分析種植體本身在種植過程中的受力情況.
2.3 含自攻刃設計B 的種植體動態植入過程分析
選定含有自攻刃設計B 的種植體作為仿真中的種植體,并將仿真情況分為S1,S2,S3 3 種,分別提交計算與后處理,3 種過程下松質骨內最大應力-應變水平如表6 所示.
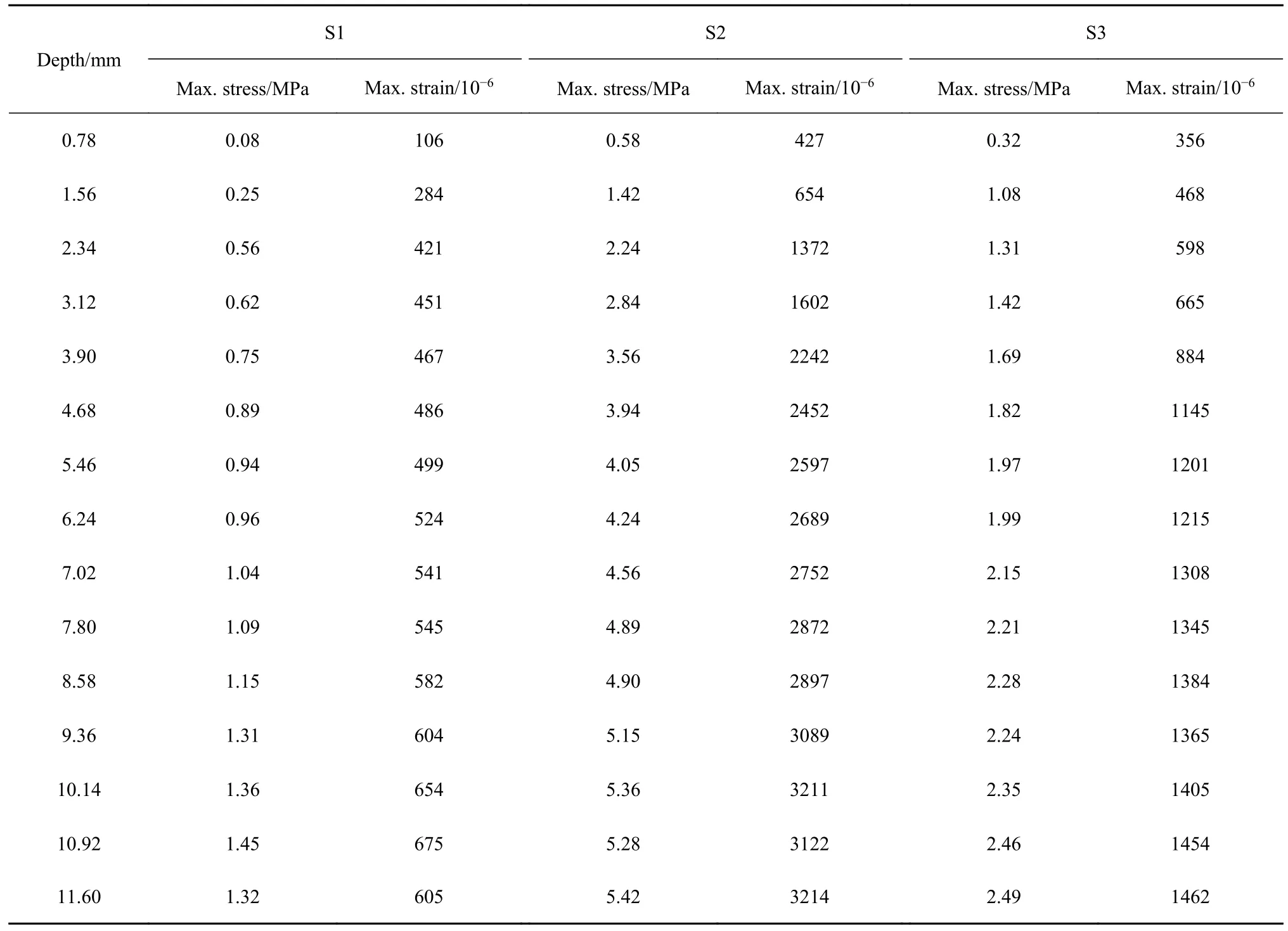
表6 3 種過程下松質骨內最大應力應變水平匯總Table 6 Summary of the maximum stress and strain levels in the cancellous bone under the three processes
可以看出如同Guan 等[18]的分析,S1 過程由于切割作用較小,松質骨內的最大應力應變全程都較小,存在穩定性較差的問題.在完全植入后,也可能會存在對骨組織刺激不夠而導致骨愈合反應較慢甚至種植失敗的情況;S2 過程的切割作用更為明顯,其松質骨內的最大應力應變全程都偏大,在完全植入后比文獻[35]中提到的安全區間的上限幾乎高出一倍,這很可能會導致骨組織發生破損,在植入過程中也可能會伴有松質骨的骨裂骨折情況,需要避免.S3 過程是較為理想的,其松質骨內的最大應力應變滿足了文獻[35]中提到的理想水平,這對于骨組織的刺激以及穩定性都是比較好的情況.
3 總結
本文旨在對于氧化鋯種植體進行建模,并對其動態植入過程進行設計、模擬與分析.在研究過程中,先對氧化鋯種植體與骨組織進行參數化建模,
之后研究了無自攻刃設計的種植體在動態植入過程中,松質骨與密質骨內的von Mises 應力水平,考慮到骨組織中松質骨更容易出現骨裂骨折現象,因此主要研究松質骨內的應力應變情況,并結合文獻[34-35]中的安全應力應變區間進行了分析.通過分析得出,隨著種植體植入深入,皮質骨與松質骨內的應力均增加,并且在螺紋尖端由于應力集中現象會出現應力應變的峰值.由于當前市售的氧化鋯種植體大多沒有自攻性,在仿真過程中骨組織網格可能因為過度擠壓造成網格出現大畸變,導致數據不準確并超過安全區間的情況發生,因此增加了氧化鋯種植體自攻刃設計,提出了3 種自攻刃設計,并通過分析選擇了最優的一種.這種自攻刃設計充分考慮了植入過程中松質骨內的應力應變水平以及工程上氧化鋯材料的特性.相較于沒有自攻刃設計的種植體,有自攻性的種植體在植入過程中對骨組織的應力更為適中,有利于后期的骨愈合效應.在植入的最終階段,松質骨內的最大應力應變均未超過安全區間上限.有自攻性的設計在臨床上也會簡化手術操作,對我國自主研發的氧化鋯種植體的設計具有一定的指導作用.
在研究的最后,本文分S1 螺紋成形,S2 螺紋切割,S3 螺紋成形與切割3 種種植方案分析了含有自攻刃設計的氧化鋯種植體的動態植入過程中松質骨內的應力應變水平.S1 過程的松質骨內最大應力應變水平均小于S2,S3 過程,因為骨與種植體表面的接觸面積較少,這可能會導致穩定性較差;S2 過程的松質骨內最大應力應變水平均大于S1,S3 過程,因為骨與種植體表面接觸面積較大,且切割的效應比例更大,這可能會導致骨破壞.而隨著植入進行,S3 過程的松質骨內最大應力應變水平處于S1 與S2 之間,且處于一個較合適安全的范圍內.在目前的實踐中,許多種植體公司通常對正常骨推薦S2 過程,而對緊密骨推薦S1 過程[42].基于本研究的結果,S3 過程可能會被推薦用于臨床實踐.
需要特別說明的是本研究中的有限元仿真過程沒有考慮骨組織發生骨折、血液流動以及植入過程中產生骨頭碎片和出血等現實因素.考慮這些因素會增加建模以及仿真的復雜性,但對模擬現實中的種植體植入過程也是很重要的.我們未來的研究將通過結合骨折、血流、血凝塊等方面考慮更詳細的接觸建模方案.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
