天問一號探測器軟著陸觸火關機策略設計
2022-03-25 02:06:28趙曉濤李茂登王云鵬徐李佳黃翔宇劉旺旺
宇航學報 2022年1期
郝 策,趙 宇,趙曉濤,李茂登,2,王云鵬,徐李佳,黃翔宇,2,徐 超,2,張 琳,劉旺旺
(1.北京控制工程研究所,北京 100094;2.空間智能控制技術重點實驗室,北京 100094)
0 引 言
2021年5月15日,天問一號探測器成功著陸火星表面,我國成為繼美國以外,第二個成功著陸火星的國家。火星探測器包含環繞器和著陸巡視器,通過一次任務成功實現“繞”、“著”、“巡”三大目標。到目前為止,人類進行火星探測任務的成功率僅有50%左右,其中大部分失敗在進入、下降和著陸(Entry, descent and landing, EDL)階段。
目前火星探測器末級減速制動主要通過發動機反推減速,若發動機關機不及時,變推力發動機的羽流與火星表面之間作用,產生向上和水平方向推力,影響著陸巡視器著陸穩定性。發動機關機時間過早,著陸巡視器的姿態、速度控制不到位,將有硬著陸的風險。這就決定了發動機關機時間在很大程度上影響了著陸任務的成敗,發動機關機策略至關重要。
目前的發動機關機模式主要有兩種:非0高度關機模式和觸地關機模式。嫦娥三號探測器和阿波羅探測器采用非0高度關機模式著陸月球表面。嫦娥三號利用伽瑪關機敏感器得到高度信息,在距離月面3 m左右時,發出發動機關機指令,然后著陸器以自由落體的方式著陸到月面。采用非0高度關機模式能減少發動機羽流造成的影響。但火星土壤機械特性與月球有所差別,火星羽流對著陸緩沖機構上的熱遠小于月球羽流熱。同時,火星表面的氣流變化劇烈,火星著陸巡視器在EDL過程中受到水平和垂直氣流的影響。采用自由落體的著陸方式,著陸巡視器極有可能出現翻轉情況,無法保證著陸的穩定性和安全性,同時不能滿足高精度著陸姿態要求。
“鳳凰號”火星探測器著陸腿敏感到一定大小的沖擊力時,觸發觸地敏感器,繼而執行發動機關機序列,設計在60 ms內完成發動機關機。該方法以觸地敏感器觸發作為執行發動機關機時序的前提條件,未充分考慮觸地敏感器極限故障模式,可能出現發動機關機時序不能正常執行的情況。
為了確保天問一號探測器EDL過程中,著陸巡視器能夠高可靠安全著陸火星表面。本文提出了一種自主高容錯觸火關機策略,通過加權評分策略以及故障工況下的多信息重組技術,創新地設計軟著陸事件的在線決策方法。基于事件觸發的發動機關機時序,減輕了7500 N變推力發動機長時間作用對著陸巡視器著陸穩定性的消極影響。
1 軟著陸在線決策
天問一號探測器與運載火箭分離后,將經歷地火轉移和環繞(模式1:巡航模式)階段,環繞器和著陸巡視器分離后,著陸巡視器進入模式2:分離滑行模式和模式3:進入準備模式,建立大氣進入姿態,然后自主完成模式4:攻角配平模式、模式5:升力控制模式、模式6:傘降模式、模式7:動力減速模式、模式8:懸停模式、模式9:避障機動模式、模式10:緩速下降模式和模式11:無控模式,該過程涉及多個火工品控起爆,如配平翼展開、降落傘開傘、拋大底和拋背罩等,火工品起爆引起的振動極易造成觸地敏感器誤觸發的情況。基于該問題,對著陸巡視器著陸事件的自主決策以及觸火信息自主故障診斷和處理提出了更高要求。
1.1 軟著陸決策模型
本文將軟著陸過程劃分為感知模塊、診斷處理模塊和決策模塊三個部分。通過感知模塊輸出4路觸火開關的狀態、4條著陸腿的健康系數、著陸巡視器的工作模式,距火面高度以及時鐘采集時間。隨后將、和輸入到診斷處理模塊,利用EDL過程中自主故障診斷功能,以加權評分方法得到4路觸火開關的可靠性評價。最后,由決策模塊輸出著陸巡視器軟著陸觸火狀態。整個信息流如圖1所示。
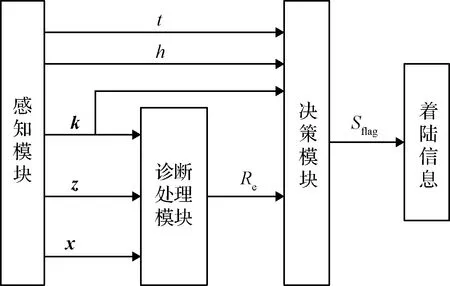
圖1 軟著陸在線決策邏輯
1.2 診斷處理模塊設計
為避免EDL過程中由于兩器分離、展開配平翼、彈傘、拋大底和拋背罩等火工品起爆造成觸火信號誤觸發情況,導致任務失敗。著陸巡視器控制計算機在模式(除模式10和模式11)初始將每路觸火信號恢復成未觸發狀態,記錄模式切換前觸火狀態,。在著陸巡視器工作模式約束條件下,利用加權評分策略對觸火開關的可用性進行量化分析:
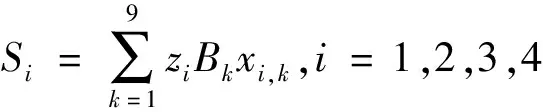
(1)
式中:為第路觸火開關的可靠性評分;為觸火敏感器健康狀態,與在軌自檢結果和自檢次數有關;為模式下的加權系數,與工作模式和著陸巡視器在軌動作有關;,為模式下第路觸火開關狀態。
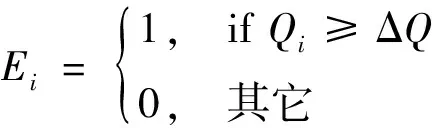
在模式10初始對4路觸火開關進行加權評分,得到4路觸火開關的可靠性評價。同時實時采集4路觸火信號狀態記為,10,根據4路觸火開關狀態和可靠性評分得到有效的觸火開關信息和觸火開關個數:
=,10
(2)
(3)
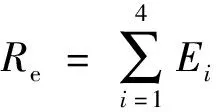
(4)
tou=,10
(5)
式中:為觸火開關狀態品質;為觸火信號可用標志;1表示觸火信號有效;0表示觸火信號無效;Δ為觸發信號有效閾值;tou為觸火開關信息,1表示觸火開關閉合,0表示觸火開關斷開。
1.3 決策模塊設計
決策模塊根據得到的觸火開關可靠性評價和觸火開關信號,自主選擇最優的軟著陸觸發策略,最終輸出著陸巡視器的觸火狀態信息。本文基于觸火信號、加速度信息以及高精度導航數據,設計了3種觸發策略。
觸火信號在診斷處理模塊進行了詳細分析,下面介紹加速度以及時間觸發策略。
1)沖擊加速度
火星著陸巡視器在軟著陸沖擊過程中,足墊與火星表面之間的相互作用主要分為三個階段:沖擊接觸、滑移和靜止。本文選取沖擊接觸階段垂向沖擊的加速度值作為分析研究的目標。
著陸巡視器與火面接觸時,通常以一個小加速度軟著陸于火面,因此著陸巡視器受到的力分別為:接觸力、自身的重力、小加速度產生的外力,通過微分方程可表示為:

(6)

采用Bekker提出的壓力下陷理論,向上的應力與撞擊坑深度的關系可表示為:

(7)
式中:為著陸巡視器單位面積受到的應力大小;為內聚系數;為摩擦因數;為足墊半徑;為變形指數,假設=1。
由式(6)和式(7)得到著陸巡視器的微分方程表達式為:

(8)
利用相關地面試驗數據和火星土壤的性能參數研究在沖擊速度分別為0.9 m/s、1.5 m/s、2.1 m/s工況下的加速度變化情況。
圖2描述了沖擊速度與沖擊加速度的關系,隨著沖擊速度增大,加速度峰值隨之增加。整個沖擊過程一般在0.1~0.4 s完成。表1統計了0.1~0.4 s時間內不同速度下的加速度,可以看出,加速度變化范圍集中在(-16 m/s,-6 m/s)。本文設定一個加速度閾值,當加速度小于該閾值時,即可認定其滿足著陸的條件之一。加速度閾值的選擇需要綜合考慮加速度計的采樣周期、著陸巡視器緩速下降段的加速度變化范圍和安全裕度。閾值選擇的太小,由于采樣頻率出現數據缺少,極有可能未采集到滿足條件的數據。閾值選擇的太大,易出現在緩速下降段滿足條件的情況,造成誤判問題。緩速下降段加速度范圍為(-5 m/s,-3 m/s),安全裕度設為1.2。綜上,加速度閾值為=-6 m/s。
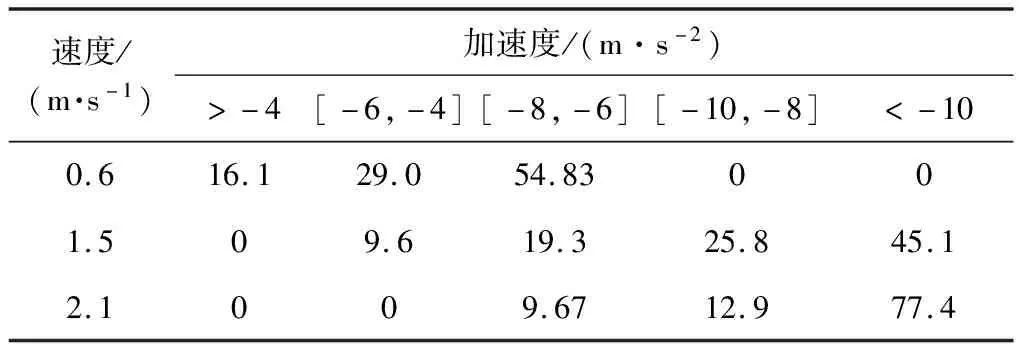
表1 不同速度下沖擊加速度百分比
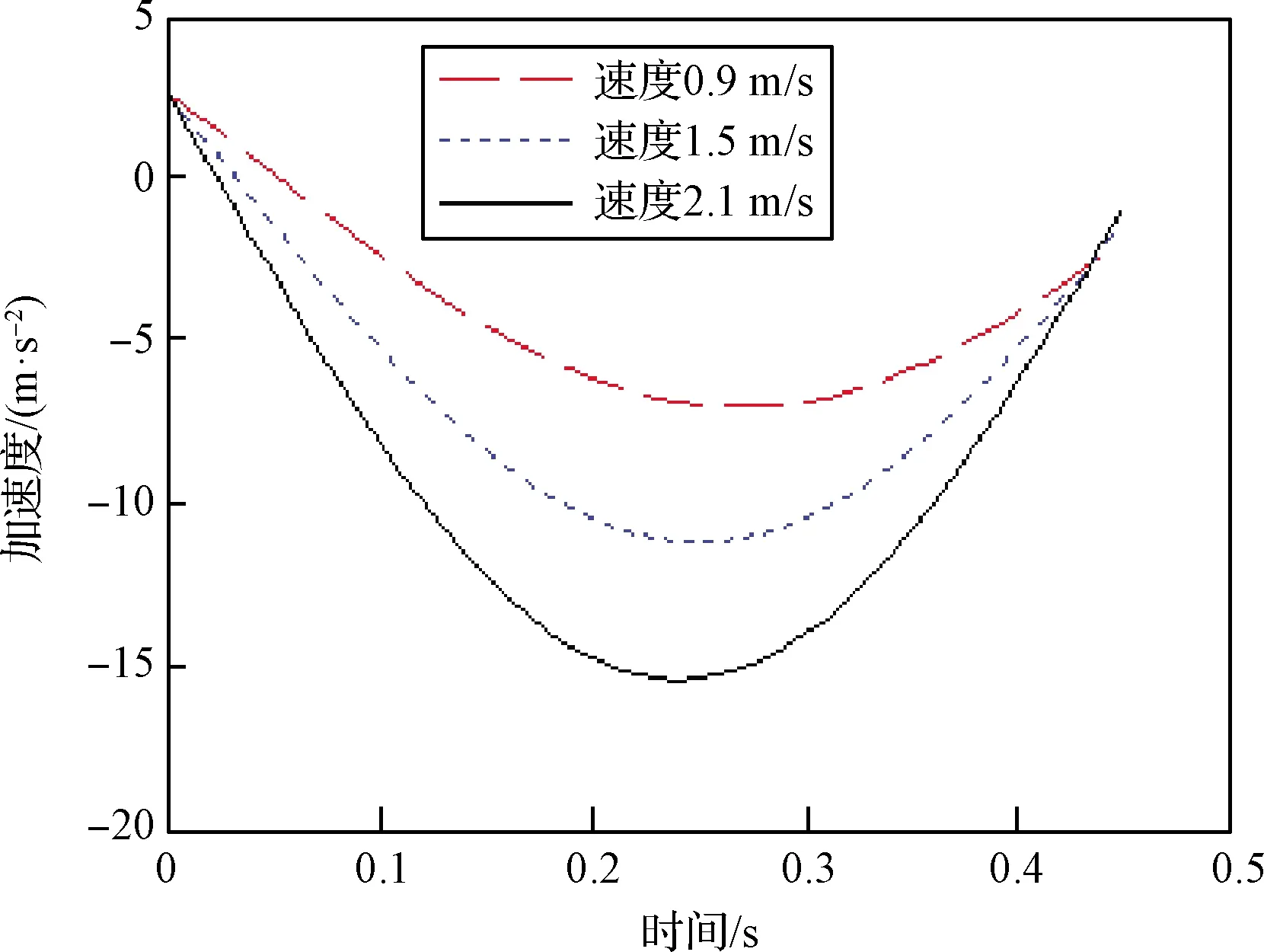
圖2 不同垂向速度下的加速度變化曲線
2)時間觸發
在觸火信號均失效的極端故障工況,采用高精度導航高度和時間累計構成了一種具有雙重保護的觸發條件。判斷方式如下:在導航高度小于(為模式10緩速下降的初始高度)時,利用測距測速敏感器采集的垂向速度和高度實時修正慣導,提高導航精度。當測距測速敏感器測量高度為時,計時器計時,記錄時間,同時采集導航垂向速度和加速度計采集合成的加速度。當滿足如下條件時,即判定火星著陸巡視器著陸。
>且<
(9)
式中:為保護高度,取為10 m,為時間閾值。
.火星著陸巡視器著陸火星表面時速度為0 m/s。
在假設1成立的條件下,與時間的關系可表示為:

(10)
在著陸巡視器緩速下降階段,通常以目標加速度作為制導目標,但考慮到發動機推力控制精度,避免出現著陸巡視器向上運動的情況。本節設計了一個隨時間變化的小加速度,提高著陸巡視器下降過程的安全性。最終通過式(10)得到時間閾值。
基于以上3種信息,考慮故障工況下的多信息重組,本文設計的觸火事件的自主決策方案如圖3所示。
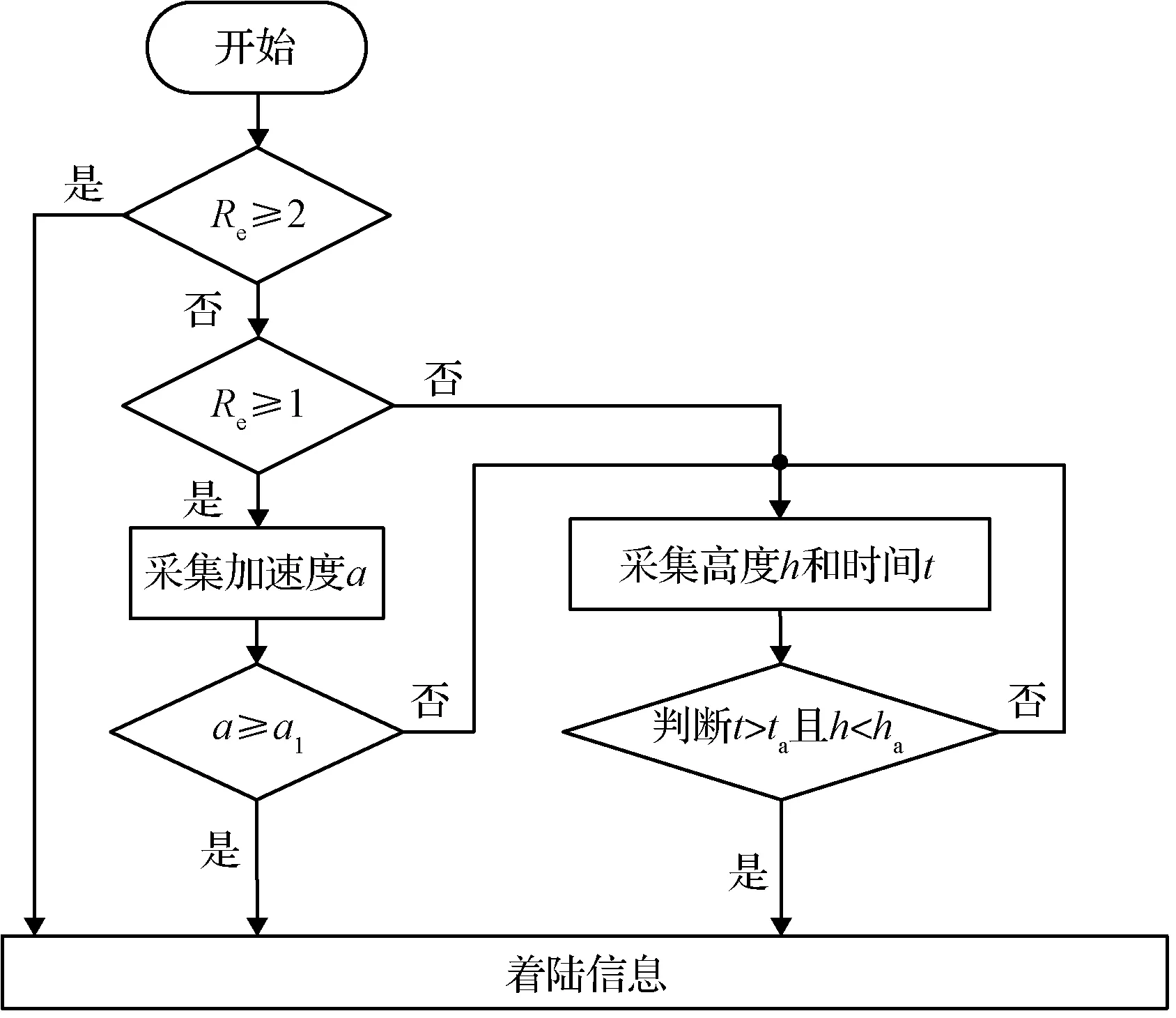
圖3 觸火狀態在線決策實施方案
著陸巡視器每條著陸腿有3對觸發開關,地面經過了大量試驗和在軌驗證,可靠性較高。因此將觸火開關信號作為首要判斷條件。考慮到在軌環境的不確定性以及極端工況,設計了兩種備份策略。
為防止由于EDL過程中加速度小于加速度閾值,誤認為著陸巡視器觸火的情況。在加速度觸發條件中增加了至少1路觸火開關信號有效的判斷,極大提高了該策略的可靠性和安全性。但著陸巡視器與火面發生沖擊時,容易出現加速度計數據異常現象,因此在4路觸火開關均失效或者加速度計異常的極端情況下,設計了基于時間的觸發策略。備份策略相對觸火信號觸發方案,具有一定的時間滯后。
通過多冗余備份的觸火策略自主決策方案,能高可靠高安全的在最短時間輸出著陸巡視器觸火狀態,進而執行后續的觸火關機時序。
2 軟著陸觸火關機時序設計
著陸巡視器觸火后,需要發送7500 N發動機關機指令。既要保證關機時間足夠短,同樣也要保證關機動作執行的可靠性。基于以上要求,本文提出了一種基于事件觸發的7500 N發動機關機時序控制策略,如圖4所示。該時序將著陸事件觸發作為起始時間,按照觸火信號觸發時刻、加速度沖擊觸發時刻以及時間觸發時刻優先級順序,選擇某一觸發時刻作為觸火關機時序執行的起點。25 ms后連續發送7500 N發動機關機指令,直至發動機在時刻收到該指令。然后7500 N發動機進行閥門關閉,執行時間為。最后,發動機完成關機。整個關機過程在40~537 ms完成。
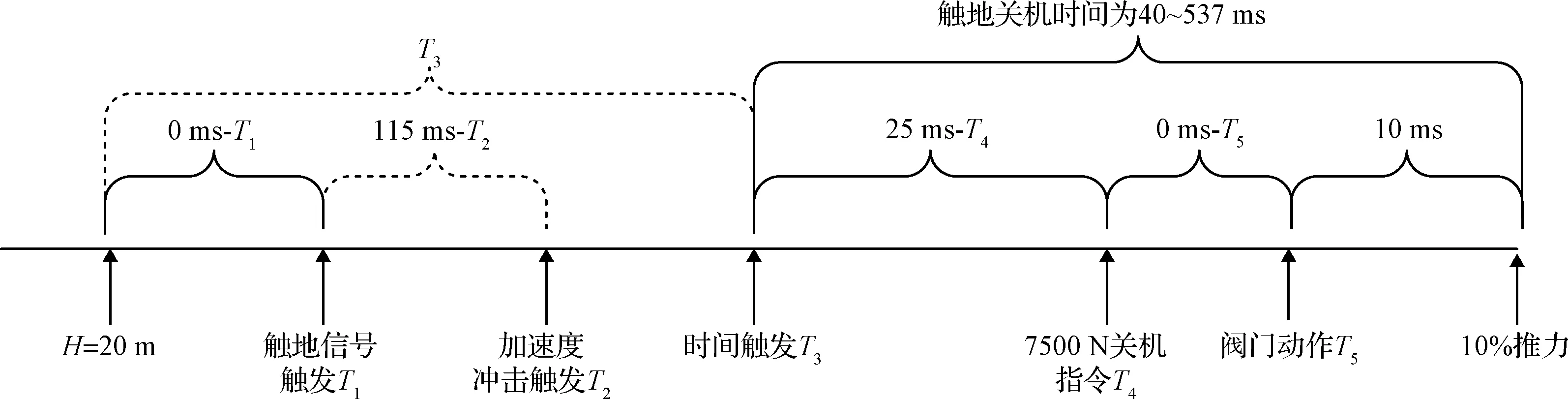
圖4 軟著陸觸火關機時序
考慮到地火距離較遠,星地通訊存在一定的風險,因此,著陸巡視器GNC分系統連續512 ms持續發送7500 N變推力發動機關機指令,在檢測到發動機收到該指令時,停止發送指令。該方案確保了7500 N發動機觸火時間發生后短時間內關機,降低了作用時長對軟著陸穩定性的消極影響。
3 軟著陸觸火關機策略校驗
針對本文設計的觸火關機策略分別進行了地面試驗驗證和在軌數據驗證分析。
3.1 地面試驗驗證
為了綜合驗證觸火關機策略的正確性,在河北懷來進行了觸火關機專題驗證試驗。采用塔架吊掛的方案來模擬火星低重力的方案,塔架與著陸巡視器間采用鋼絲繩連接,吊繩上的拉力保持恒定,從而模擬著陸過程中火星重力環境。地面試驗主要對觸火開關觸發和加速度觸發策略進行了點火試驗驗證。
..觸地開關觸發
著陸巡視器觸地開關均為未觸發狀態,起始高度為70 m,發動機的推力范圍約為900~3500 N。著陸巡視器經歷懸停模式、避障機動模式、緩速下降模式最終著陸至石灰地面。
圖5、圖6和圖8以觸地信號觸發前一拍作為時間起點,描述了觸地過程中加速度計采集合成的速度、加速度以及觸火信號個數變化過程。觸火信號采集周期與加速度計采樣周期不同。由圖5和圖6可以看出,著陸巡視器觸地前一直向下運動,在采集到觸地信號后,由于著陸于石灰地面,出現了約0.04 s的彈跳,然后減速,最終著陸巡視器處于穩定狀態,加速度計采集合成的速度和加速度分別穩定于0 m/s和火星表面重力加速度g附近,整個沖擊過程約0.25 s。圖7可以看出在觸地事件觸發后,發動機推力減小至0,完成發動機關機。
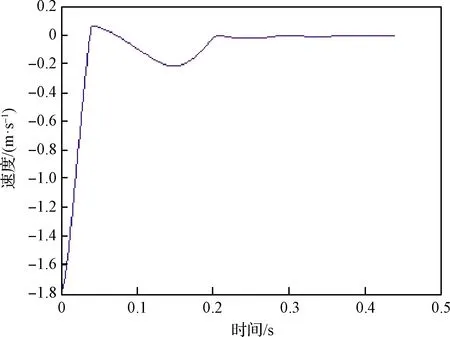
圖5 垂向速度變化示意圖
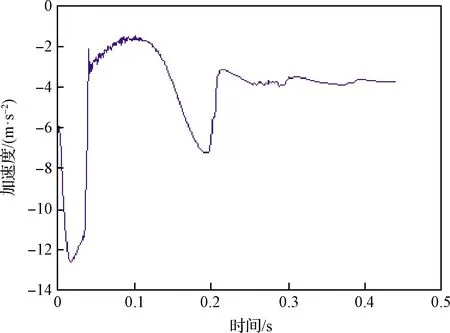
圖6 垂向加速度變化示意圖
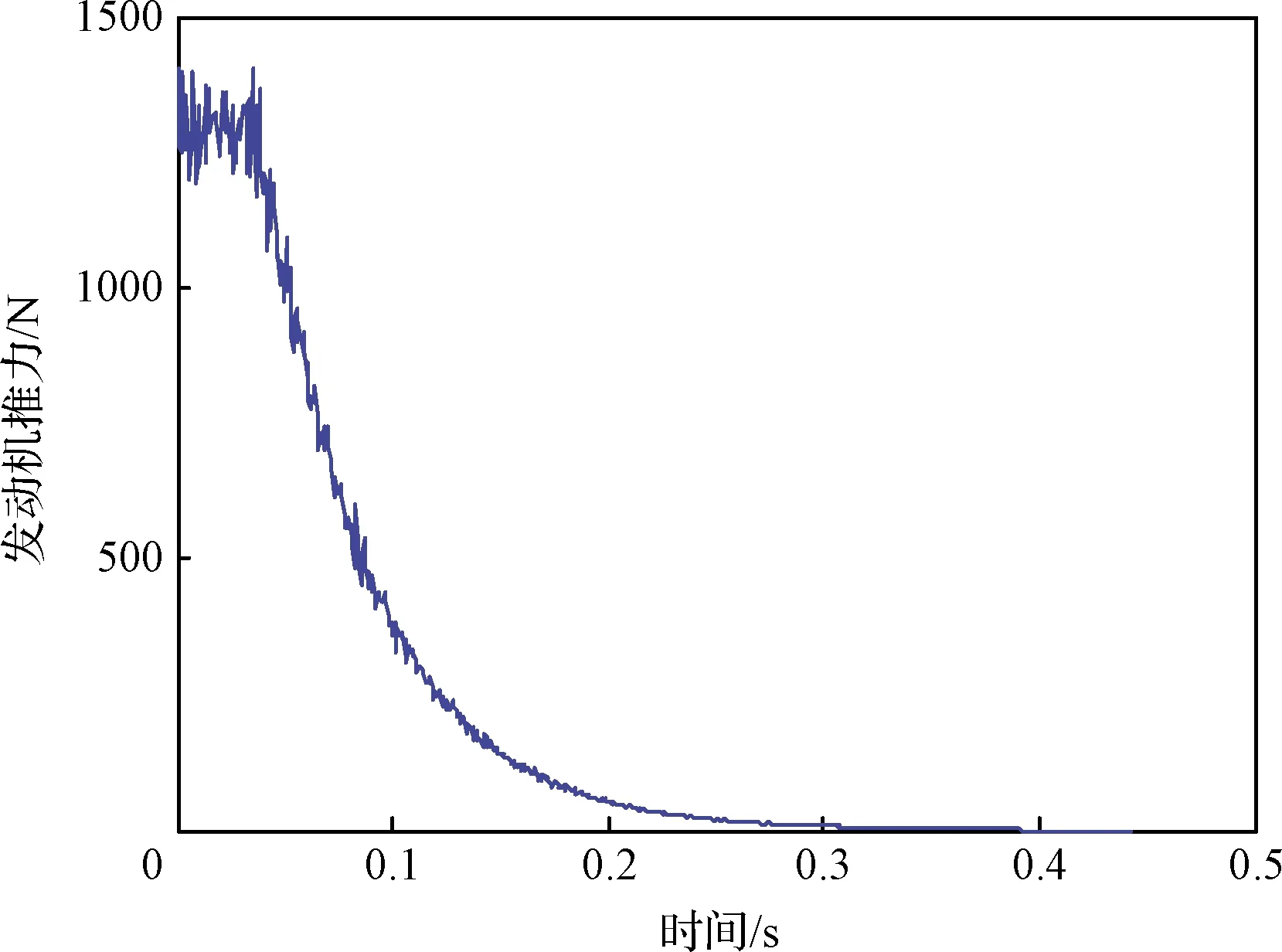
圖7 發動機推力變化示意圖
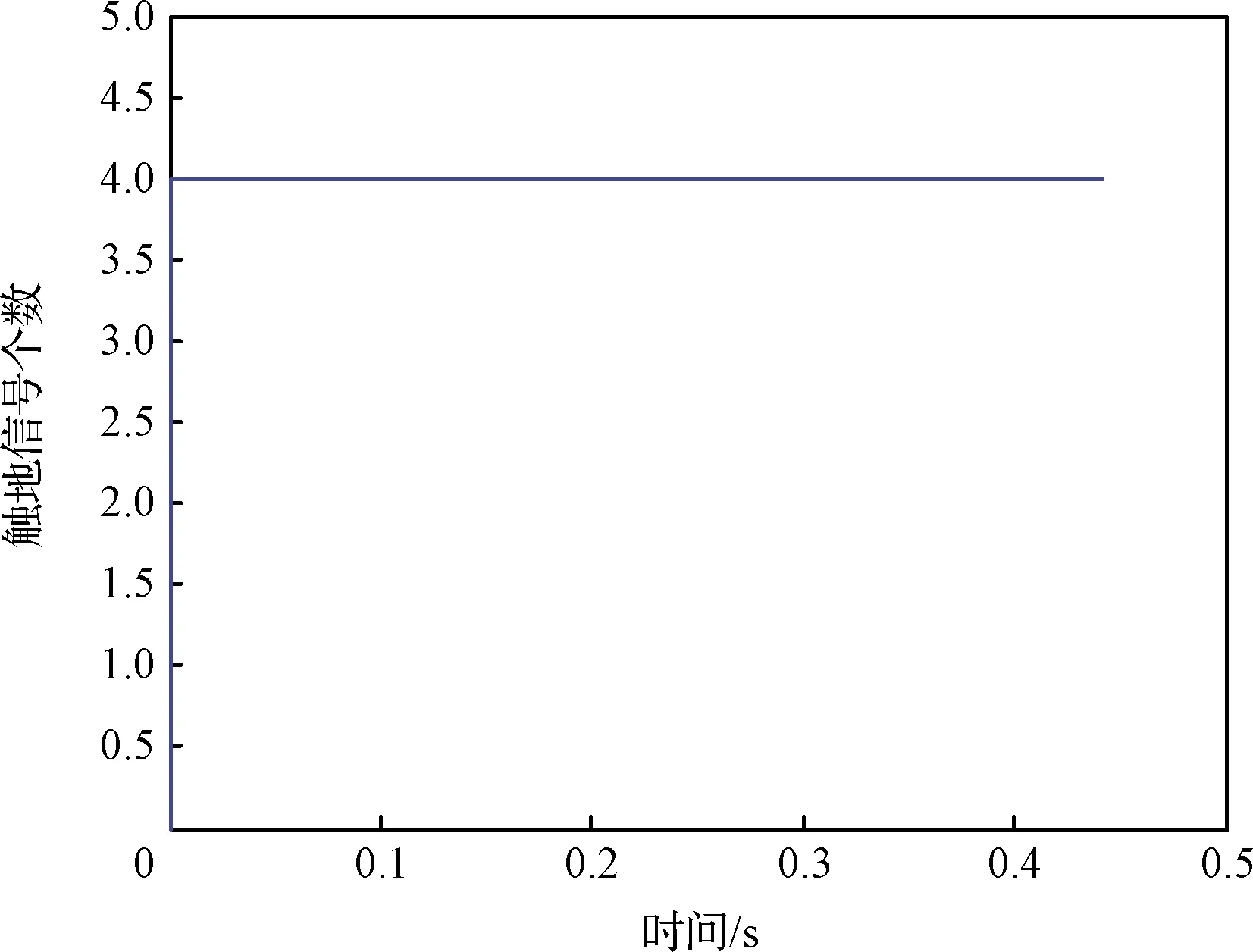
圖8 觸火信號的變化示意圖
綜上,地面試驗驗證了基于觸火開關觸發的發動機關機策略的有效性。
..加速度計觸發
地面設定星上軟件屏蔽觸地信號觸發策略。著陸巡視器從起始高度70 m,經歷懸停模式、避障機動模式、緩速下降模式,最終著陸至石灰地面。
導航速度與前面試驗基本一致,不受該工況影響,這里不進行重復描述。通過對比圖9和圖6以及圖10和圖7發現,發動機關機時間比觸地開關觸發試驗長,觸地信號有效后約300 ms完成了發動機關機。

圖9 垂向加速度變化示意圖
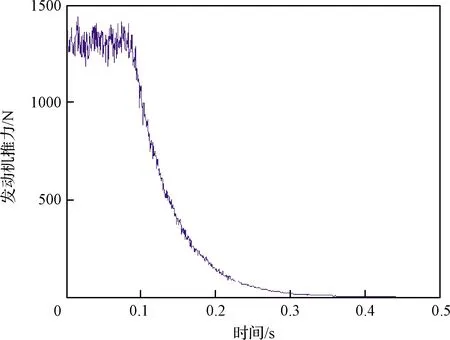
圖10 發動機推力變化示意圖
綜上,地面試驗驗證了基于加速度觸發的發動機關機策略的有效性。
..在軌數據分析
天問一號著陸巡視器觸火過程與地面驗證基本一致。由在軌數據可以發現,4路觸火信號同時觸發,著陸巡視器與重力方向夾角為0.001°,可以判斷火星著陸巡視器觸火姿態穩定。通過分析著陸巡視器的合成加速度和速度,發現觸地關機過程中未出現著陸巡視器向上彈跳的情況,加速度計合成加速度最終穩定在火星重力加速度附近,垂直速度穩定在0 m/s附近,導航垂直高度為0.886 m(著陸腿高度)。綜上可知,著陸巡視器7500 N發動機關機正常,天問一號探測器成功著陸,進一步驗證了本文觸火關機策略的有效性。
4 結 論
本文對天問一號探測器觸火關機策略進行了研究分析,結合觸火信號、加速度信息以及高精度導航數據信息設計了3種觸火策略,實現了軟著陸自主決策,提高了軟著陸事件觸發的可靠性和安全性。利用優化的觸火關機時序,以著陸事件為觸發條件,通過優化關機時序,實現了觸火關機動作執行的高效性和自主性。通過地面試驗和在軌結果,驗證了觸火關機策略的有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
數學大世界(2018年1期)2018-04-12 05:39:14
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車與新動力(2015年1期)2015-02-27 12:11:01
時代英語·高三(2014年5期)2014-08-26 02:49:51
