無人機影像匹配點云在大比例尺DEM數據生產中的應用
2022-03-25 07:06:38馬富明
水科學與工程技術 2022年1期
關鍵詞:測量
馬富明
(福建省水投勘測設計有限公司,福州 350001)
目前,水利工程規劃設計主要以大比例尺地形圖作為基準數據,然而這種離散采樣的二維模型往往會忽略局部細微地貌特征。另外,對于水利信息化建設所強調的數字化、直觀化、可視化3大特征欠缺表達[1]。隨著水利規劃設計業務的延伸,對可用于一站式、多維度的可視化基準數據提出了新的需求。特別是在水利工程前期規劃中,以固定采樣間隔的橫縱斷面圖數據表征河道實際地貌形態,往往會造成施工工程量與設計工程量存在較大出入,因此,基于高分辨率DEM數據的動態采樣設計是當前最優解決方案。當前,大比例尺DEM數據獲取方式大致可分為傳統測量手段(全站儀、RTK)、無人機航測技術、機載Lidar 3類,綜合考慮實際工作效率與生產成本,無人機航測技術在作業組織、生產效率等方面具有較明顯的優勢。
1 無人機影像匹配點云特點
隨著攝影測量技術和計算機圖形學的發展與融合,基于無人機航空影像的三維信息提取技術成為當前測繪地理信息領域的研究熱點[2]。通過利用以SFM、CMVS和PMVS為代表的影像匹配算法,可從無人機影像中提取高密度、紋理豐富、結構特征明顯的三維點云數據。同時無人機影像匹配點云在DEM數據生產中也存在諸多問題亟待解決,如數據冗余、建筑物邊界線性特征不明顯、粗差點較多等,這就給后續的特征信息提取、點云濾波、三維模型重建帶來了很多不便,而且也會制約更深層次的信息提取與表達[3]。無人機影像匹配點云在DEM數據生產中存在的問題如圖1:(a)噪聲點較多;(b)建筑物結構特征不明顯;(c)高反射率地物(水域)無法獲取;(d)植被覆蓋密集區域無地面點。
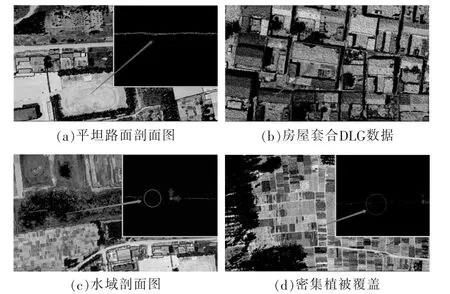
圖1 無人機影像匹配點云圖
2 試驗區概況及總體技術線路
2.1 主要技術路線
結合無人機影像匹配點云的特點,研究了DEM數據處理的關鍵技術環節如圖2,包括影像匹配點云的生產、點云濾波、DEM精細化編輯及精度評定[4]。

圖2 DEM制作流程
2.2 試驗區數據獲取
王村分洪閘位于河北省文安縣境內的趙王新河右堤(千里堤)上,距白洋淀棗林樁樞紐18km,是分減趙王新河洪水,控制向文安分洪的重要工程。本次測量任務主要是防洪段1∶1000 DEM數據,測量范圍為長約2km、寬約1km的塊狀區域。作業期間渠系、河道內存在積水,人員無法實地作業,故采用無人機航空攝影測量作業方法[5]。
2.2.1 航飛參數設計
項目采用縱橫CW-10固定翼無人機航攝系統,搭載SONY-ILCE7R相機及POS平臺進行測區試驗,具體相關參數如表1。通過現場踏勘,并結合《低空數字攝影測量外業規范》要求,確定無人機航線飛行方向為東西向,相對航高310m,航向重疊度為70%,旁向重疊度60%,影像地面分辨率為0.04m有效架次1次,總共獲取579張照片。
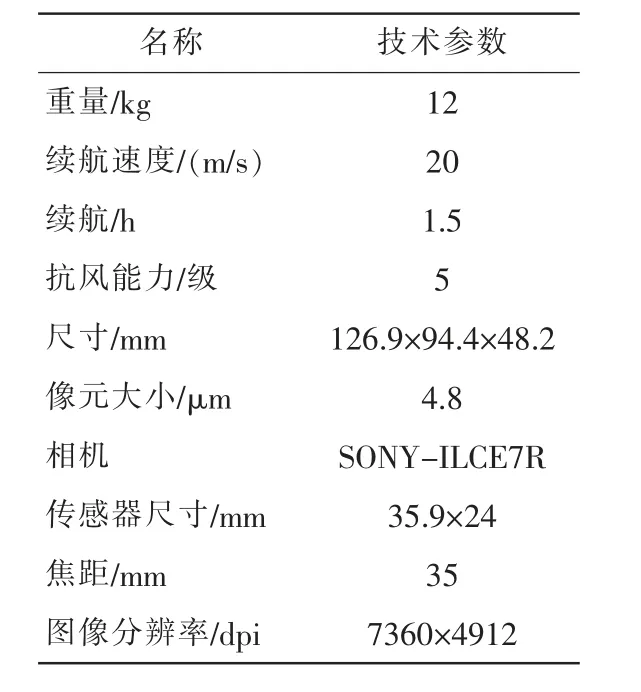
表1 無人機航飛技術參數
2.2.2 像控點布設由于無人機影像重疊度大,基線短,按照《1∶500 1∶1000地形圖航空攝影測量外業規范》要求,外業像片控制點布設沿航向、旁向分別布設,具體為航向間隔300~400m布點,沿旁向間隔300~400m布點。此次試驗區共布設12個控制點,如圖3,其中每個控制點均可以作為平高檢查點,為后續數據處理提供地理參考。

圖3 像控點布設
3 數據處理
3.1 解析空中三角測量
解析空中三角測量是攝影測量4D產品生產的第一道工序,對于高精度的航空攝影測量應用至關重要。由于無人機搭載的非量測相機獲取的序列影像經自由網平差后存在掉片、扭曲變形等問題,因此嚴密的相機檢校參數對于空三加密的精度、穩定性尤為重要。綜合考慮相機檢校能力、自動化處理程度,本項目選取PhotoScan進行空三解算,并結合PhotoScan解算報告中的平面誤差和影像匹配點云的高程誤差評定空三精度,如表2。
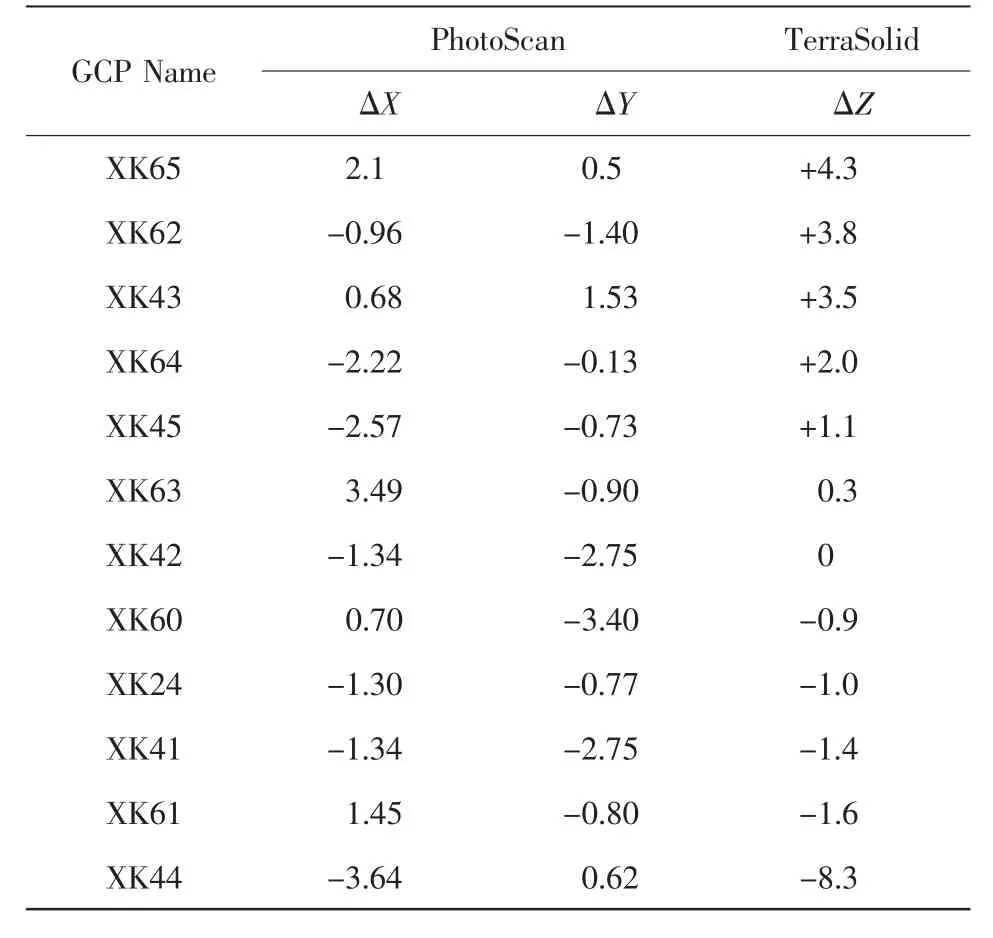
表2 像控點精度 單位:cm
3.2 無人機影像匹配點云濾波
由于影像色調不一致、空三解算精度、相機檢校等因素的影響,無人機影像匹配點云存在大量噪點、建筑物結構缺失、水域漏洞等狀態,對后續DEM數據生產帶來諸多不利影響。結合本項目測區地貌特點,探討了基于TerraSolid的無人機影像匹配點云數據處理方法[6]。
3.2.1 水域置平
無人機影像匹配點云在高反射率區域(如河流、池塘)表現為大量粗差點,因此需要外業實測該區域的范圍線、高程數據,以便內業編輯。利用TMODEL模塊的Fix Elevation選項,對該項目內水域高程進行修正。
3.2.2 植被濾波
在地面點分類算法之前,必須對低矮植被密集覆蓋區域進行有效濾波。通常采用以下兩種濾波方法:①調整地面分類算法中的Max building size數值,但會造成DEM數據細微地貌特征被忽略;②采用植被指數分類算法,即根據點云的色彩信息構建分類波段。本項目采用第2種解決方法,具體參數設置參照如下Visual band difference計算公式(RGB代表點云顏色信息)。


圖4 基于植被指數濾波算法對比
3.2.3 噪點去除
根據對地面點分類的影響,噪點可分為低點(明顯低于地面的粗差點)和表面噪聲點(與地面點粘連在一起)。對于低點,采用Low points算法可有效去除;對于表面噪聲點,采用Surface points對原始數據進行擬合處理,可以改善建筑物結構特征。
3.2.4 地面點提取
TerraSolid地面點濾波算法采用的是迭代三角網法,即在初始采樣范圍內選取最低點作為種子點,根據所構建三角網的迭代角度、迭代距離對地面點進行閾值篩選,直到三角網內不再有新的地面點加入。其中Max building size是該算法最為關鍵的參數,過大會導致地貌特征失真,過小會出現大量非地面點誤分類,建議根據項目區域建筑物中位數尺寸設置。
3.3 精細化編輯
經過TerraSolid濾波后的點云數據存在大量孔洞,且存在一定的錯誤分類點[7]。本項目采用Inpho軟件的DTM模塊對其進行孔洞插值、局部細小突起精細化編輯,如圖5。
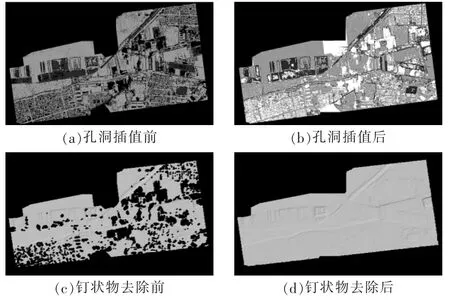
圖5 精細化編輯前后對比
3.4 DEM數據高程渲染及精度平度
將人工精細化編輯后的點數數據導入Global Mapper構建三角網模型,并以高程進行顏色渲染。
外業在顧及地貌特征基礎上,均勻采集平坦區域檢查點(采集原則同像控點)。本次共采集150個檢查點,以檢查點數據為基準按照式(2)對DEM進行精度評定。

式中 m為DEM高程中誤差(m);Δ為檢查點野外實測高程與DEM內差值不符值(m);n為參與評定精度的檢查點數。
檢查點統計結果如表3,其中最大誤差0.175m,最小誤差0.016m,DEM高程中誤差為0.094m。對比《1∶500 1∶1000 1∶2000地形圖航空攝影測量內業規范》,生產數據精度滿足1∶1000 DEM規范要求。

表3 DEM數據與檢查點高程對比 單位:m
4 結語
無人機影像匹配點云作為航空攝影測量生產的過程數據,其蘊涵的線性結構特征、地物地貌三維信息為新型測繪產品的生產提供了可能性。本文在分析無人機影像匹配點云數據特點的基礎上,結合Lidar數據處理技術,成功提取了目標區域的地貌特征信息,并生產出滿足國家規范要求的數字化產品。作為非接觸性數據獲取方式,結合成熟的信息提取技術,為水利工程中的防洪險情普查、應急測繪、規劃勘查工作提供了一種新的解決思路。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
