基于極限學習的彈丸阻力系數辨識
2022-03-28 07:43:18李帥孝夏悠然
彈道學報 2022年1期
嚴 侃,李帥孝,李 莉,夏悠然
(1.海軍裝備部,陜西 西安 710000;2.陸軍裝備部 沈陽地區軍事代表局駐沈陽地區第二軍事代表室,遼寧 沈陽 110045;3.遼沈工業集團有限公司,遼寧 沈陽 110045;4.南京理工大學 瞬態物理國家重點實驗室,江蘇 南京 210094)
現代戰爭形式多種多樣,彈箭作為主戰武器,對其彈道性能要求也越來越高。準確有效獲取彈箭氣動參數是無控彈箭減小落點散布、提高打擊精度的基礎與關鍵。彈箭氣動參數辨識技術是飛行器氣動參數辨識的重要分支,氣動參數決定了彈箭彈道性能與穩定性;研究彈箭氣動參數辨識方法,可以有效提高無控彈射表編制精度,提高打擊精度。阻力系數是氣動參數中尤為重要的參數,其精確與否直接決定了彈箭的射程和精度。因此,研究彈丸阻力系數辨識問題具有重要的科學意義和工程應用價值。
最小二乘法作為經典的氣動參數辨識方法,在線性系統下能夠取得良好的辨識精度,DUNKEL基于D0128飛行器實測數據,利用最小二乘法實現了氣動導數與穩定導數的辨識。1912年FISHES提出了極大似然法,極大似然估計因其收斂性好,能夠實現無偏估計,辨識精度高等優點被廣泛應用到氣動參數辨識中。夏智勛等在解決軸對稱飛行器非線性氣動參數辨識問題時,采用分段辨識策略,利用估計法計算出辨識初值,然后基于極大似然法成功實現了對大攻角非線性氣動參數的辨識。但是極大似然法計算耗時較長,不適合在線辨識,為了滿足實時估計的要求,王超等設計了基于漸消記憶最小二乘與迭代拓展卡爾曼濾波的氣動參數兩步辨識法,實現了無人機氣動參數在線辨識。
近年來,計算機科學的快速發展推動了氣動參數辨識研究,并取得了顯著成果。針對傳統氣動參數辨識方法存在的局限和不足,許多智能算法及其改進算法被廣泛應用到氣動參數辨識中。基于神經網絡良好的非線性擬合能力,王學孝構建了一種自動增加隱含層節點的RBF神經網絡模型,成功改善了嚴重非線性狀態方程的辨識效果;王琨等基于極大似然準則,將遺傳算法作為導彈氣動辨識算法,大幅降低了氣動參數辨識計算的復雜性,提高了氣動參數辨識的準確性和可靠性。針對撲翼飛行器飛行過程中啟動參數模型隱式辨識的問題,韓建福等提出了雙BP神經網絡模型辨識方法,采用神經網絡對撲翼飛行器動力學模型進行逆向特征表示,解決了由于復雜的動力學模型所帶來的梯度消失問題,為隱式辨識問題提供了解決方案。針對傳統算法的初值敏感問題,侯現欽等將差分進化算法應用到高旋彈氣動參數辨識中,成功辨識了高旋彈的零升阻力系數和極阻尼力矩系數。針對飛行器氣動參數隨飛行軌跡動態變化問題,文獻[10]提出了動態參數估計(DAPE)概念,并與動態粒子群算法結合,成功辨識了滾動飛行器的氣動參數。針對多旋翼無人機推進子系統精確模型過于復雜的問題,文獻[11]利用模糊自適應神經元,解決了多旋翼無人機推進系統的參數辨識和軌跡跟蹤問題。針對基于梯度下降的傳統辨識方法在超聲速情況下的失效問題,XUE等提出了一種鴿群優化算法,將辨識問題轉化為優化問題,成功辨識了高超聲速飛行器氣動參數。
極限學習(extreme learning machine,ELM)是由黃廣斌等提出的一種簡單高效的神經網絡結構,極限學習機因為具有良好的泛化性能、不易陷入局部最優、魯棒性好以及需要手動調節的參數少等優點,在云計算、數據可視化以及隨機投影等方面得到了廣泛應用。極限學習機算法隨機產生輸入層到隱含層的連接權值和隱含層閾值,并且僅通過求解隱含層輸出矩陣的Moor-Penrose廣義逆矩陣即可得到隱含層和輸出層之間的連接權值,節省了大量訓練時間。將極限學習算法應用到彈丸氣動參數辨識問題,無需迭代調整輸入權重以及隱含層神經元閾值,需要人工手動調整的參數少,能夠有效提高辨識效率,減少辨識時間。
本文基于仿真得到的彈道數據,利用極限學習算法辨識彈丸阻力系數。仿真結果表明,該方法具有辨識精度高、辨識速度快以及抗干擾能力強的優點,能夠在高噪聲環境下,快速有效地辨識彈丸阻力系數。
1 數學模型
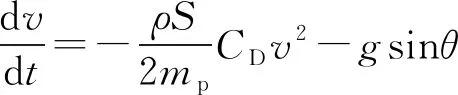
本文主要研究阻力系數的辨識問題,所以采用質點彈道方程組作為數學模型,其具體表達式為
(1)

(2)

(3)

(4)
式中:為彈丸速度,為大氣密度,為彈丸特征面積,為彈丸質量,為彈丸阻力系數,為重力加速度,為彈道傾角,為射程,為高度。
2 極限學習算法原理

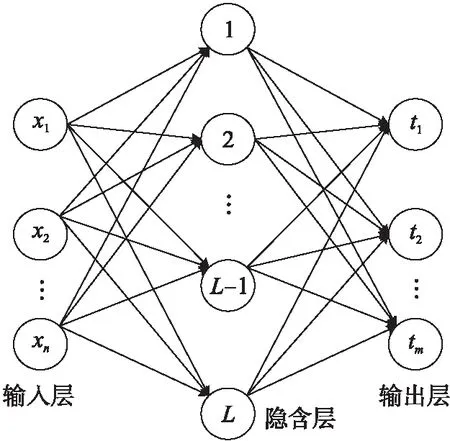
圖1 極限學習網絡結構圖
2.1 訓練過程
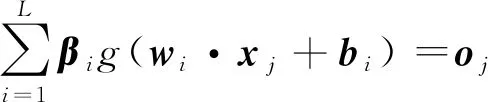
給定組任意的訓練樣本(,),其中=(12…)∈表示維輸入訓練樣本數據,=(12…)∈表示維輸出訓練樣本數據。隱含層神經元個數,激活函數為()的極限學習網絡實際輸出為
(5)
式中:=1,2,…,,=(12…)為第個隱含層神經元和輸入節點之間的連接權值,=(12…)是第個隱含層神經元與輸出節點之間的連接權值,為第個隱含層神經元的閾值。隨機產生和,其中·表示矩陣的內積運算。
(6)
寫成矩陣形式:=。其中,為隱含層輸出矩陣,為隱含層和輸出層之間的連接權值矩陣,為輸出矩陣。

(7)

(8)

(9)
(10)
式中:為輸出矩陣的Moore-Penrose廣義逆矩陣。


(11)
式中:為單位矩陣,為正則化系數。
2.2 預測過程

(12)
3 彈丸阻力系數辨識
3.1 數據歸一化
網絡的輸入數據往往具有不同的物理含義以及不同的量綱,不同的量綱會影響數據分析的結果,為了消除不同量綱之間的影響,需要對原始數據進行歸一化處理。在進行歸一化處理后,能夠進一步提高模型的收斂速度,提升模型的精度。本文采用min-max normalization歸一化法,將全部數據映射到[0,1]區間內,以輸入數據為例,具體公式為
(13)

3.2 極限學習網絡結構確定
利用極限學習機進行彈丸氣動參數辨識時,需確定輸入層節點數、隱含層神經元個數、激活函數(·)以及輸出層節點數。
①輸入層節點數設定。
極限學習機的輸入層與隱含層之間的特征映射數量是根據影響因素來確定的。基于質點彈道方程,確定影響因素分別為速度,彈道傾角,射程,高度。因此最終確定網絡的輸入層的節點數=4。
②輸出層節點數設定。
希望借助極限學習機實現對彈丸阻力系數的辨識,因此選定輸出層的節點數=1。
③激活函數選擇。
通過對輸入數據歸一化處理,輸入數據的大小均被映射到[0,1]區間,這與sigmoid函數的值域剛好重合,因此選用sigmoid函數作為激活函數,網絡將取得更好的預測效果。
④隱含層神經元個數設定。

4 結果分析
4.1 數值仿真1
假定導彈阻力系數為常值03,初始射速=930 m/s,初始射角=45°,標準大氣條件下,基于質點彈道方程,利用四階龍格-庫塔法解算彈道,得到網絡數據集,并在此數據集的基礎上,利用極限學習機對導彈阻力系數進行辨識。最終得到的辨識結果如圖2~圖3所示。
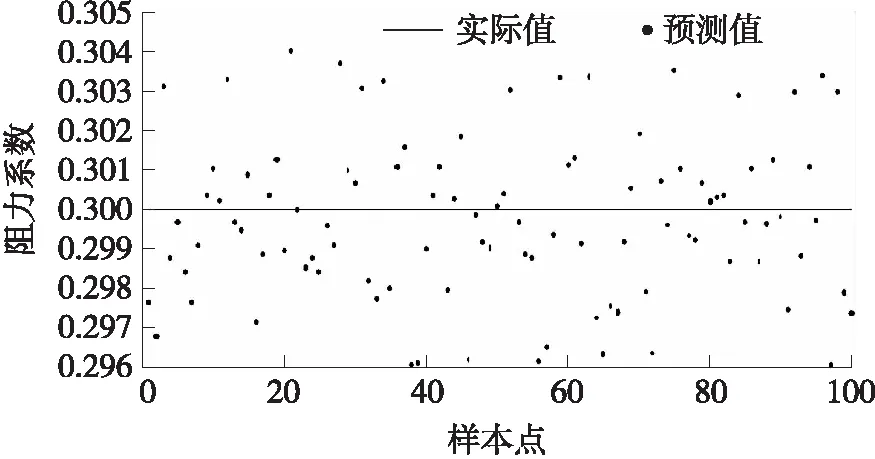
圖2 無噪聲情況下阻力系數CD辨識結果
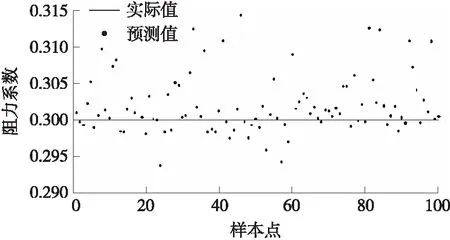
圖3 10%噪聲情況下阻力系數CD辨識結果
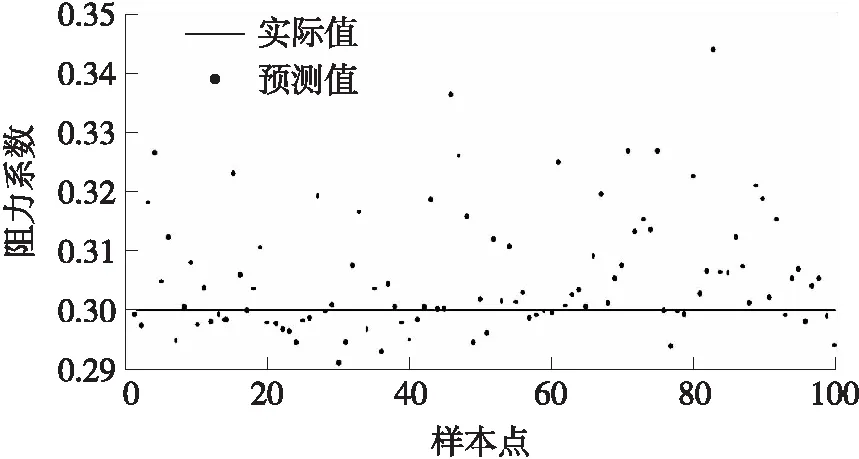
圖4 20%噪聲情況下阻力系數CD辨識結果
本文一共選取100組數據作為預測樣本。無外界噪聲干擾的情況下,預測值能較好地擬合實際值,模型預測值分布在區間[0.296,0.304]內,理論值與預測值的最大誤差0.004,最大相對誤差1.3%。加入10%幅值的噪聲后,模型預測精度下降,預測值主要集中在[0.3,0.305]區間內,最大預測誤差值升至0.015,最大相對誤差5%。20%噪聲情況下預測值出現2個瑕疵點(相對誤差大于10%),預測值主要集中在[0.29,0.31]區間內,少部分預測值落入[0.31,0.33]區間,模型相對誤差2.5%,能夠滿足實際工程精度要求。
均方誤差(mean square error,MSE)是反映估計量與被估計量之間差異程度的一種度量,擬合優度用于檢驗模型對樣本觀測值的擬合程度。的值越小,的值越接近1,說明擬合程度越好,網絡辨識精度越高。本文選取這2個參數作為模型辨識結果的評價指標。和的具體表達式為

(14)
(15)
式中:為第個實際值;為第個預測值;為誤差的平方和;為總平方和。
根據成熟期水稻的株高、穗長、節間長等來分析分蘗期不同淹水處理后水稻植株株型的變化。由表1可知,淹水深度為1/2和2/3時,水稻受淹1 d處理的穗長較對照顯著降低,株高和各節間長與對照相比略有增減但差異均不顯著;水稻受淹3 d和5 d處理的株高、穗長、第5節間長及第1節間長較對照均降低或顯著降低,且隨受淹天數的延長呈現遞減趨勢。淹水深度為1/1時,水稻受淹1 d處理的株高較對照不降反增;受淹3 d和5 d處理的株高及第1節間長顯著低于對照,其中1/1-5 d處理的穗長(9.70 cm)和第1節間長(1.93 cm)呈現最小值,較對照顯著減少24.0%和45.9%,水稻受損害程度最為嚴重。
表1給出了3種不同噪聲情況下理論阻力系數辨識結果對比。
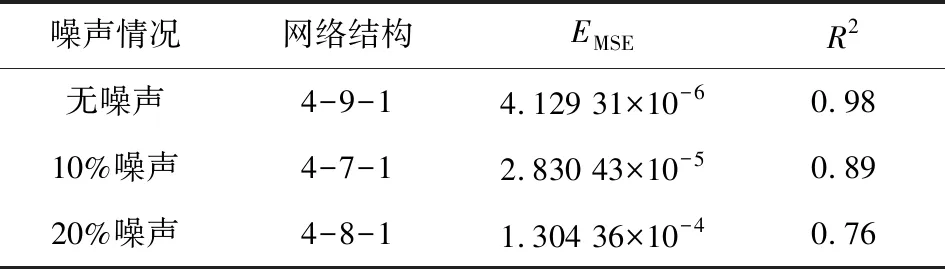
表1 3種噪聲情況下理論阻力系數CD辨識結果
不同噪聲情況下,需對極限學習機網絡結構重新調整。無噪聲情況下,極限學習辨識均方誤差數量級為10,擬合優度0.98。均方誤差與擬合優度正相關,每增加10%幅值噪聲,均方誤差數量級下降1級,擬合優度下降0.1。
4.2 數值仿真2
以某型彈箭的仿真數據為網絡數據集,為了避免連續數據之間的高度共線性對網絡辨識結果產生干擾,隨機打亂數據集,選取3 000組數據作為訓練樣本,150組數據作為預測樣本。在對數據進行歸一化處理后,不同噪聲情況下,建立極限學習模型對數據進行訓練、預測,最終的網絡辨識結果如圖5~圖7所示。
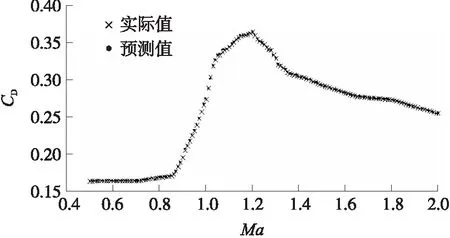
圖5 無噪聲情況下阻力系數辨識結果
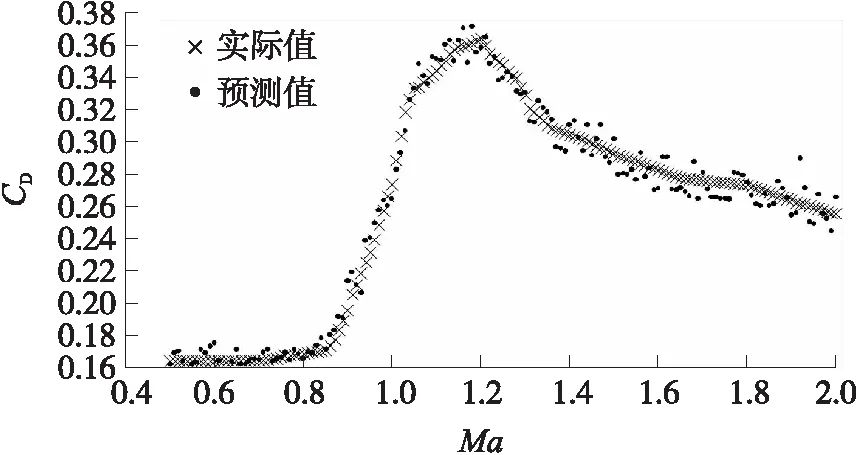
圖6 10%噪聲情況下阻力系數辨識結果

圖7 20%噪聲情況下阻力系數辨識結果
無噪聲情況下,辨識精度良好,預測值與實際值基本重合,辨識均方誤差數量級為10。隨著加入的噪聲越大,辨識精度降低。10%噪聲情況下,在=1.9處,辨識結果出現瑕疵點,辨識均方誤差數量級為10。加入20%幅值噪聲后,辨識均方誤差數量級為10,在跨聲速區域,辨識結果出現部分瑕疵點,ELM整體預測相對誤差小于10%,能夠滿足實際工程精度要求。
表2給出了3種不同噪聲情況下阻力系數辨識結果對比。

表2 3種噪聲情況下阻力系數CD辨識結果
均方誤差仍與擬合優度正相關,每加入10%噪聲,辨識均方誤差數量級增加1級,擬合優度下降0.1。相同噪聲情況下,基于理論假定值的網絡辨識結果要優于基于實際工程值的辨識結果,這是由于在彈丸實際飛行過程中,彈丸飛行狀態復雜,質點彈道方程不能完全描述彈丸飛行狀態導致的。
表3給出了3種噪聲情況下,利用極限學習算法與傳統BP神經網絡算法進行彈丸氣動參數辨識的結果對比。
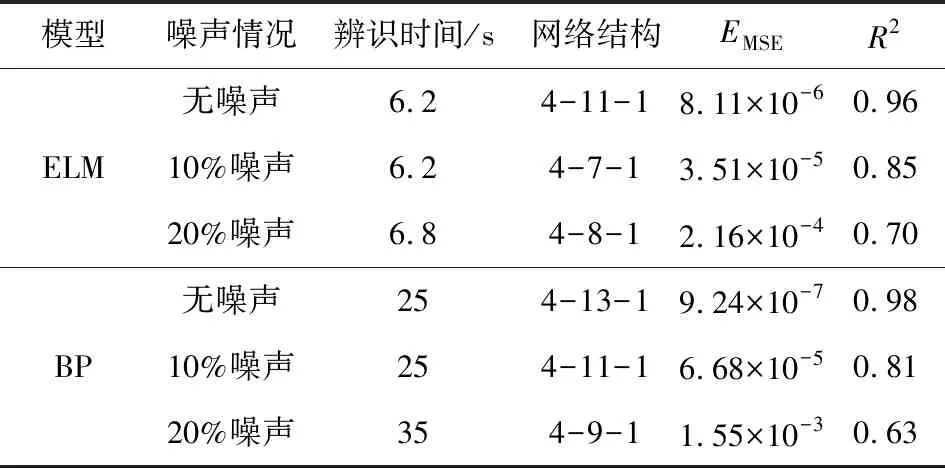
表3 不同方法阻力系數CD辨識結果
綜上所述,與傳統BP神經網絡相比,利用ELM辨識精度更高,辨識時間更短,具有更高的辨識精度和全局適應性。
表4給出了3種噪聲情況下,ELM與極大似然法(MLE)進行彈丸氣動參數辨識的結果對比。

表4 阻力系數CD辨識結果
與傳統的MLE相比,ELM具有辨識精度高,辨識速度快以及抗干擾能力強的優點。無噪聲情況下,2種方法的辨識均方誤差數量級均為10,均能很好地辨識彈丸阻力系數,但ELM的辨識時間僅為MLE的1/10;有噪聲情況下,ELM辨識時間基本保持不變,辨識精度小幅下降但仍能滿足實際工程需要,而每引入10%噪聲。MLE的辨識時間增加1/4,辨識精度下降2個數量級,20%噪聲情況下,MLE的辨識結果已經無法滿足實際工程需求。
5 結束語
本文在多種噪聲環境下,利用ELM成功辨識彈丸的阻力系數,并且與傳統的BP算法以及極大似然法進行對比,得出以下結論:
①極限學習機能夠在有噪聲情況下,快速辨識得到彈丸氣動參數,能夠滿足實際工程精度需要和實時性要求。
②與傳統的BP神經網絡相比,ELM結構簡單,需要人工設置的參數少,收斂速度快。在無噪聲情況下,BP算法的辨識精度略優于ELM,但是ELM的辨識時間僅為BP的1/4;有噪聲情況下,ELM的辨識時間和辨識精度遠優于BP算法。
③與傳統極大似然方法相比,該方法具有更高的辨識精度、更好的抗干擾能力、全局適應能力以及更快的辨識速度。