四旋翼無人機特種彈藥懸停發射動力學研究
2022-03-28 07:43:50王林濤
彈道學報 2022年1期
王林濤,王 健
(南京理工大學 能源與動力工程學院,江蘇 南京 210094)
小型四旋翼無人機近年來在軍事、消防、警用和偵察等領域得到廣泛的應用,四旋翼無人機防爆發射裝置是在小型四旋翼無人機上加裝通訊、定位、攝像和發射設備,使用四旋翼無人機作為設備載體,因此具備在許多特殊環境下工作的能力,可以輕松實現破窗發射各種用途的警用特種彈藥,目前適用于反恐、消防、軍警演習及一些突發狀況。四旋翼無人機屬于欠驅動系統,通過機身4個旋翼提供飛行的動力,調整4個旋翼的動力大小從而實現機身姿態的變化,而在加裝了特種彈藥發射器后,由于彈藥發射的內彈道過程會形成對發射筒反向的沖擊力,在受到沖擊之后無人機的姿態角及位置必然會發生變化,因此必須對發射裝置進行試射試驗和數值仿真計算,來驗證該四旋翼無人機掛載發射器能夠實現特種彈藥安全發射。計算發射產生的后坐沖量理論閾值,以確保在不同發射后坐力沖擊下設備工作安全。
1 內彈道過程計算
1.1 基本參數
后坐力和后坐沖量的計算涉及內彈道過程,試驗用無人機掛載發射裝置發射的彈藥為特種用途彈藥,確定特種用途彈藥的基本發射參數如表1所示,內彈道計算參數如表2所示,表中給出主要參數。

表1 特種彈藥指標數據表

表2 內彈道計算初始參數
1.2 內彈道方程組及解算
由于內彈道過程具有復雜多變的特點,為方便進行求解計算,通常都要對內彈道過程進行簡化,因此本文提出以下假設:
①火藥燃燒遵循幾何燃燒定律;
②火藥顆粒均是在平均壓力下燃燒;
③內膛表面熱散失使用增加比熱比系數的方法間接修正;
④火藥燃氣服從諾貝爾-阿貝爾狀態方程;
⑤使用次要功系數來考慮其他次要功;
⑥單位質量火藥燃燒所釋放的能量及生成的燃氣燃燒溫度均為定值,燃燒生成的物質組分變化不予以考慮;
⑦彈丸擠進過程中不存在漏氣現象且彈帶擠進膛線瞬時完成。
根據上述假設中對內彈道過程的簡化,可以將復雜的內彈道過程歸納總結為以下內彈道方程組:
(1)

(2)
式中:為火藥相對已燃體積;,,為火藥形狀特征量;為火藥相對已燃厚度;為時間;為燃速系數;為弧厚;為壓力;為火藥燃燒結束瞬間的壓力全沖量;為炮膛橫斷面積;為次要功系數;為彈丸質量;為彈丸運動速度;=-1;為裝藥質量;為藥室自由容積縮徑長;為彈丸行程;為藥室容積縮徑長;為裝填密度;為余容;為火藥密度;為燃速指數;為火藥力。
根據文獻[1]中數值解法使用軟件進行編程計算,求解內彈道方程的計算方法使用四階龍格-庫塔法,四階龍格-庫塔法是一種高精度的單步算法,能有效抑制誤差,解算得到的膛內平均壓力如圖1所示。
圖1 膛內壓力-時間曲線
圖1解算結果顯示膛內平均壓力的峰值為1.835 MPa,此結果較為符合工程上該型發射藥的發射效果。
1.3 后坐力計算及試驗驗證
基于拉格朗日假設的壓力分布解,可以得到膛內平均壓力與膛底壓力之間的換算關系式,根據膛底壓力大小計算得到膛底合力數值變化曲線如圖2所示,在沒有成熟理論計算公式的情況下,對身管武器后坐力的計算只能通過計算身管武器膛底合力的大小作為參考后坐力。
圖2 膛底合力隨時間變化曲線
為驗證后坐力計算結果的正確性進行了特種彈藥單發發射后坐力測試試驗,通過力傳感器測量得到多組后坐力試驗數據,進行數據處理后得到特種彈藥發射后坐力的試驗測量值。如圖3所示,將后坐力試驗測試結果與理論計算結果進行比對,理論計算后坐力峰值大小為3 322 N,測試后坐力數據峰值為3 214 N,誤差3.36%,計算結果與試驗測試符合較好。故可以得到特種彈藥發射對機身產生的后坐沖量為11.26 N·s。
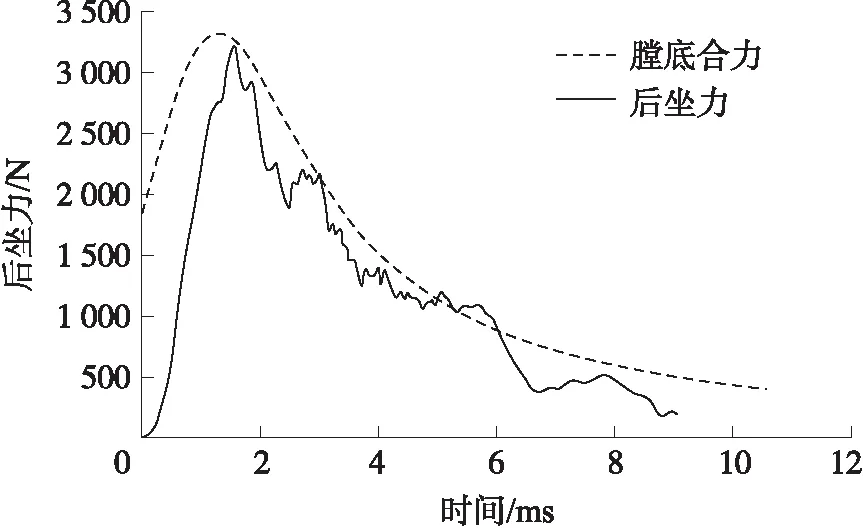
圖3 后坐力計算與試驗值對比圖
2 動力學建模
2.1 坐標系選擇和簡化模型建立
對于任意系統中的運動而言,選擇合適的參考坐標原點建立特定的參考坐標系無疑會更好地描繪運動的特性。選擇恰當的參考坐標系能夠使得運動方程的形式得到簡化,更加有利于數值求解和運動過程分析。圖4是整個裝置在地軸系和體軸系中的簡化示意圖,為地面坐標系,為機體坐標系。本文選擇地面坐標系作為參考坐標系,對四旋翼無人機進行動力學建模。
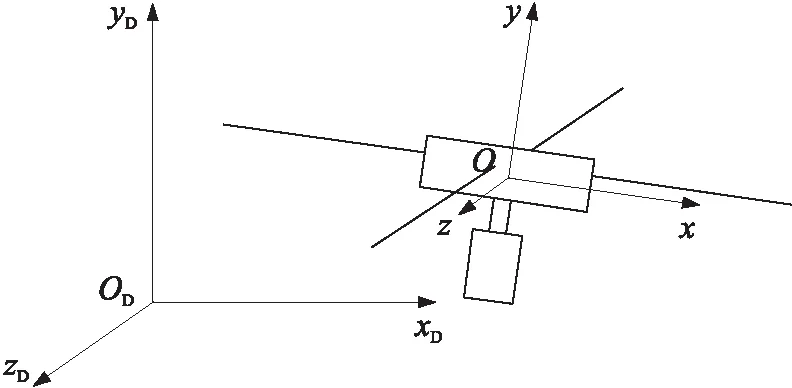
圖4 坐標系簡化示意圖
為獲得數值計算所需的數據,使用三維建模軟件對四旋翼無人機掛載發射裝置模型進行簡化建模,得到四旋翼無人機掛載發射裝置整體的質量慣性矩等計算參數,質量慣性矩參數:=0.103 4 kg·m,=0.171 7 kg·m,=0.101 5 kg·m。
2.2 質心移動方程和轉動方程
四旋翼無人機及掛載發射器在空中懸停發射特種彈藥并受到發射反沖后坐力的整個過程可以視為一個理想的剛體運動,整個機體在空中的運動存在6個自由度,即機體質心移動的3個自由度和機體繞質心轉動的3個自由度,故可以建立六自由度動力學方程的數學模型,對機體的運動采用牛頓-歐拉法進行分析。
考慮到仿真計算與實際情況之間存在一定差異,本次建模對次要因素進行忽略,故提出以下的假設:
①整個無人機及掛載發射裝置質心在軸上;
②忽略地球自轉、公轉;
③重力大小恒定,忽略彈丸反發射的質量減少;
④發射時視為平衡狀態且忽略空氣流動的影響。
采用牛頓-歐拉法建立四旋翼無人機動力學模型的過程本文不做過多表述,可參考文獻[7-8],得到四旋翼無人機及掛載發射器質心移動方程和繞質心轉動方程如下:
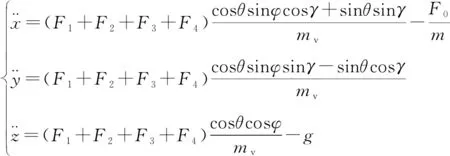
(3)
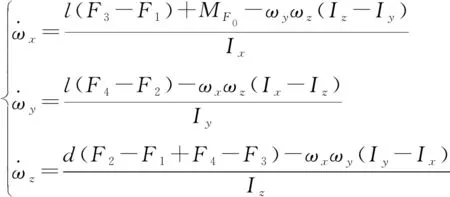
(4)
3 數值模擬
為獲得四旋翼無人機及掛載發射器在發射特種彈藥后的姿態和位置變化,在上文的假設條件下,預先對計算模型姿態角及高度位置進行了不加控制的數值模擬計算,仿真計算結果與預期出入較大,無法實現機身平穩,因此下文對基于PID控制器控制下的四旋翼無人機進行姿態角及高度位置數值模擬計算。
3.1 四旋翼無人機姿態控制
四旋翼無人機通過改變旋翼電機轉速起到改變4個動力源提供的升力大小的作用,從而調整無人機在空中的姿態角度,4個旋翼的轉速為(=1,2,3,4),其產生的升力為如圖5所示,兩者之間存在關系:
(5)
式中:為升力系數,為比例系數(通常為2,即升力與轉速的平方成正比)。
參考上文圖5,四旋翼無人機要實現俯仰運動、滾轉運動和偏航運動只能通過調節旋翼升力大小,以俯仰運動為例,在方向上增大或減小即可產生仰角,下面的公式(=1,2,3,4)分別為控制升降運動、俯仰運動、滾轉運動和偏航運動的控制系數。
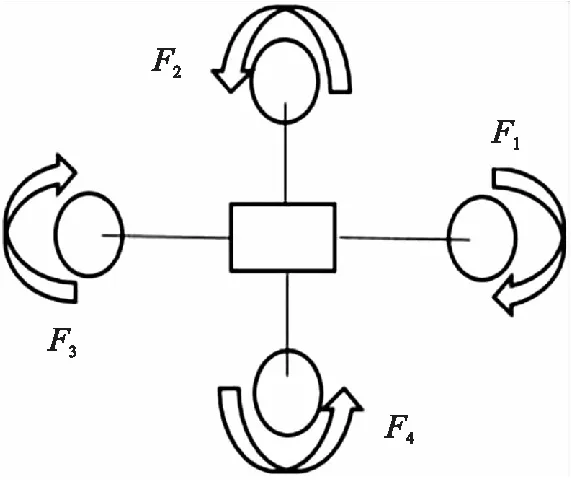
圖5 四旋翼無人機旋翼升力示意圖
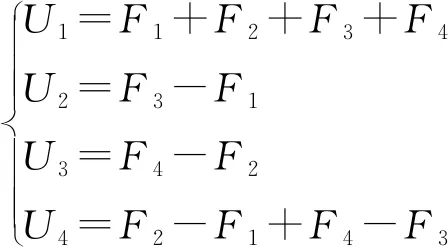
(6)
3.2 PID控制原理
在模擬控制系統中,控制器最常用的控制規律是PID控制,它是一種線性的控制器,其控制系統原理的基本框圖如圖6所示。
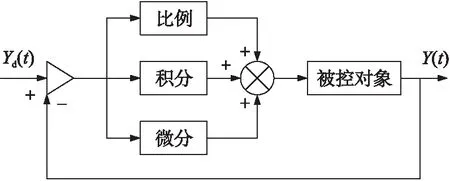
圖6 PID控制系統原理框圖
PID控制器根據給定值與實際輸出值構成控制偏差。
()=()-()=
(7)
PID的控制規律為

(8)
或寫成傳遞函數形式:

(9)
式中:為比例系數;為積分時間常數;為微分時間常數。
3.3 計算模型建立與計算參數設置
使用數值計算Simulink建模工具建立四旋翼無人機掛載發射裝置系統的姿態位置解算模型,其控制系統結構框圖如圖7所示。
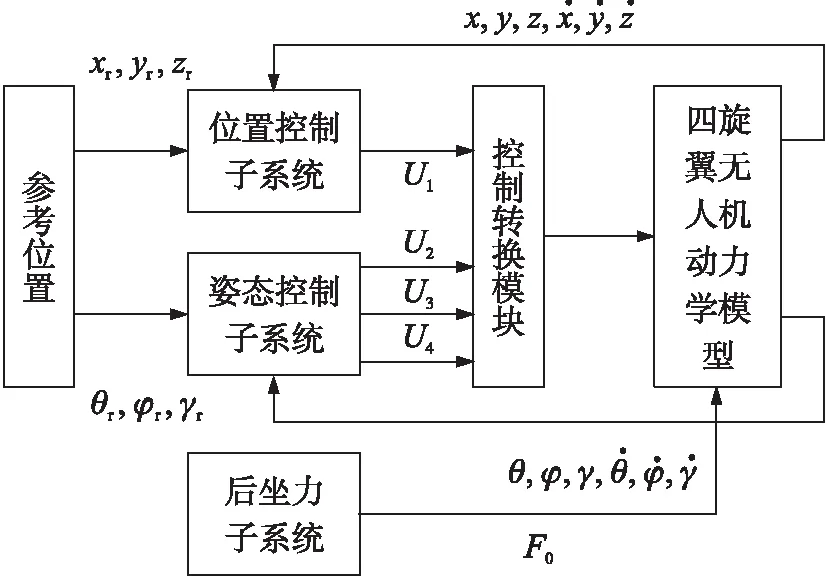
圖7 四旋翼無人機PID控制系統結構框圖
1)位置控制。
位置控制系統采用PD控制器對四旋翼無人機飛行及懸停的高度進行控制,輸入值為由位置外環計算得到的位置預期值、、及位置變化率,對位置的控制需要設置3個單獨的PD控制回路分別對、、3個方向上的位置進行控制,在控制器內部設置了參考值,對各軸的控制參數分別為
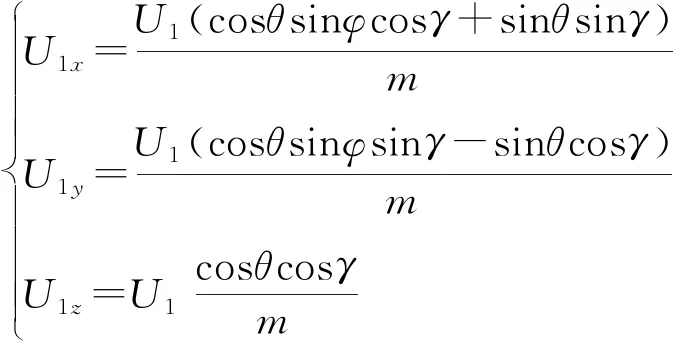
(10)
2)姿態控制。
姿態控制子系統采用PID控制器對四旋翼無人機的俯仰、滾轉及偏航運動進行控制。因為發射裝置在發射前處于懸停狀態,近似可以看作平衡狀態,相對于地面坐標系和機體坐標系的3個姿態角均為0,因此設置的參考角度均為0°。輸入項為由姿態內環計算得到的俯仰角、滾轉角、偏航角預期值及由卡爾曼濾波器估計所得到的角速度。控制系數、、設計如下:
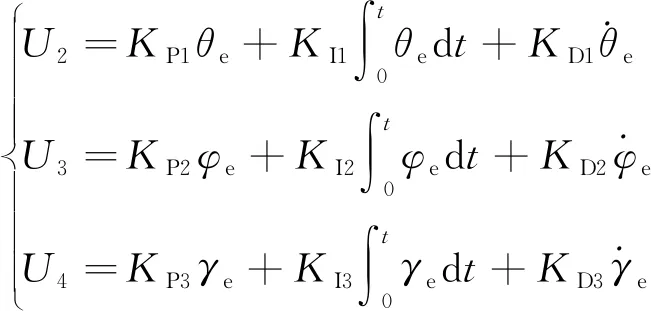
(11)
式中:為比例系數;為積分系數;為微分系數;,,為定義的姿態角輸入與輸出的誤差。
3)仿真計算使用的參數。
參數如表3、表4所示。

表3 仿真計算物理參數表

表4 PID控制參數表
3.4 仿真計算結果
多管發射器(6發射筒)存在6個不同的發射位置,由于簡化后的發射裝置關于平面對稱,故存在2組發射位置關于平面對稱,在這2組位置發射特種彈藥對機身產生的影響除了偏轉方向外都相同,所以6個不同的發射位置可以看作4種發射工況,下文對這4種發射位置進行了編號,示意圖如圖8所示。
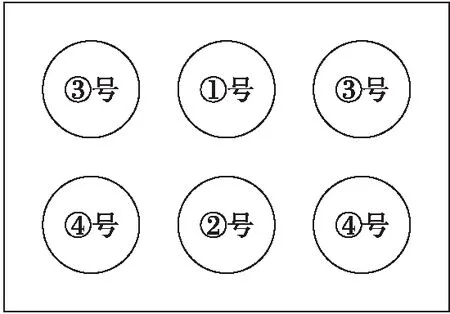
圖8 4種發射位置編號示意圖
多管發射器發射底座通過搭載轉子與吊架,轉子可以實現旋轉,從而改變特種彈藥的發射角度。對于使用舵機控制的多管發射裝置,彈藥不僅能水平發射,而且可以實現多角度發射。本文選擇比較有代表性的0°角發射、15°角發射、30°角發射、45°角發射4種角度()的發射工況進行仿真計算。
仿真計算存在4種發射位置,選擇了4種發射角度,因此有16種計算工況,以2號位置0°角發射為例,機身產生最大6.68°的俯仰角變化,機身俯仰在發射后0.4 s左右達到峰值,俯仰角約在發射后2.79 s回調至初始值;機身高度從10 m升高至10.25 m,且能在發射后2.2 s左右回調至原高度并保持穩定。計算結果如圖9、圖10所示。
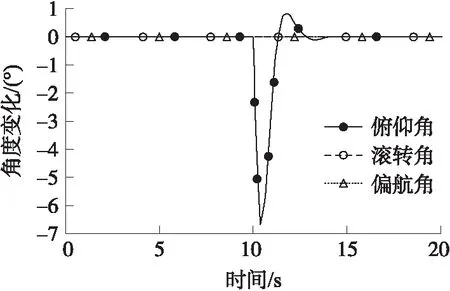
圖9 無人機姿態變化圖
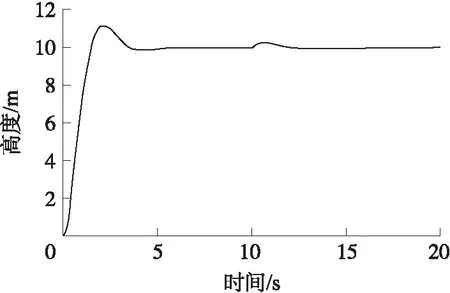
圖10 無人機高度變化圖
計算結果顯示,特種彈藥發射對四旋翼無人機產生的主要影響是造成俯仰角偏轉。數據表明,四旋翼無人機在受到后坐力反沖的情況下,俯仰角最大向后偏轉為6.91°,最小為4.04°。3號、4號位置彈藥發射對機身產生的偏航變化在1°左右。彈藥發射后機身總質量減輕,同時為實現姿態角回調增加了旋翼升力,故無人機高度上升。俯仰角變化峰值的計算結果如表5所示。
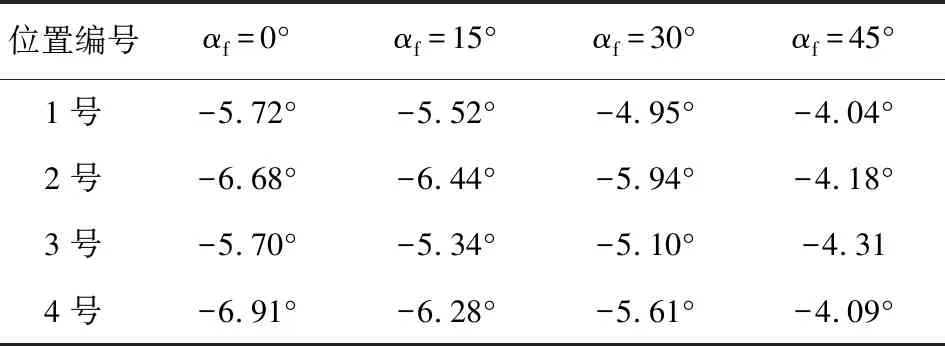
表5 俯仰角變化峰值
為驗證仿真計算結果,進行了四旋翼無人機特種彈藥懸停單發發射試驗,試驗發射工況為2號位置0°角發射,通過高速攝像等設備記錄四旋翼無人機在空中的姿態及位置變化。試驗獲得四旋翼無人機后坐力沖擊下,俯仰角變化峰值為-6.14°,仿真計算誤差8.80%;機身高度上升0.53 m,仿真計算結果為上升0.25 m,其原因在于未設置高度控制。試驗與仿真計算符合較好,仿真計算模型正確性得以驗證。
通過仿真計算得到的俯仰角變化數據、偏航角變化數據和高度變化等數據表明,16種工況下特種彈藥單發發射對四旋翼無人機及掛載發射器整體產生的沖擊影響均能通過PID控制器調控消除,實現發射后機身平穩。
4 理論閾值計算
當四旋翼無人機受到的沖量較大時,可能會導致較大的俯仰角偏轉,此時對俯仰姿態進行控制的旋翼電機轉速都超出限定范圍,無法實現對機身俯仰角的調控,因此四旋翼無人機能受到的沖量應當有一個理論閾值。在上文的計算參數基礎上,不斷加大四旋翼無人機掛載發射裝置所受到的沖量,當沖量為114.3 N·s時,對機身俯仰角進行控制的旋翼轉速達到極限,此時控制俯仰的升力大小,如圖11所示,由于此時無人機的姿態偏轉角較大,旋翼提供的升力無法快速維持高度穩定,因此無人機機身高度將出現較大下降,機身俯仰角偏轉達到107.8°,計算結果顯示,四旋翼無人機掛載發射裝置幾乎無法實現平衡,當沖量為124 N·s時,無人機高度從10 m跌落至地面,當沖量為136.1 N·s時,計算結果顯示無人機高度和姿態角都失去控制無法回調,故可以得到四旋翼無人機受到后坐沖量的理論閾值為136.1 N·s。
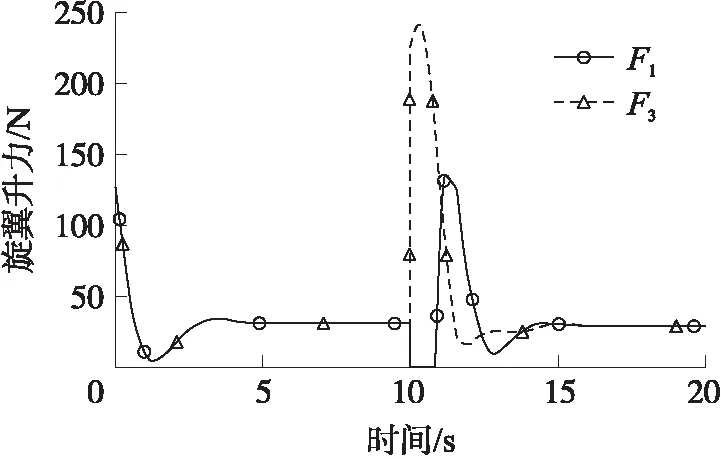
圖11 控制俯仰的極限升力
5 結束語
通過對四旋翼無人機掛載發射器系統的建模仿真計算,可以得到以下結論:
①四旋翼無人機及掛載發射器系統在懸停狀態發射單發特種彈藥后,可通過PID姿態控制功能實現整個系統的平衡穩定。PID控制效果較好。
②后坐力測試試驗和特種彈藥發射試驗驗證了本文仿真計算模型的正確性。
③四旋翼無人機及掛載發射器彈藥發射所受到的后坐沖量理論閾值為136.1 N·s。