
城市軌道交通列車自主運行系統(tǒng)優(yōu)勢淺析與探討
2022-03-30 01:54:08王艷偉馬超劉汪洋
交通科技與管理 2022年5期
王艷偉 馬超 劉汪洋

摘要 列車自主運行系統(tǒng)作為以車車之間通信為理念的全新信號控制系統(tǒng),在當前日益蓬勃發(fā)展的城市軌道交通行業(yè)中,系統(tǒng)優(yōu)勢突出。結(jié)合傳統(tǒng)CBTC信號系統(tǒng)和TACS系統(tǒng)軟硬件差異,并以城市軌道交通運營線路存在的典型問題為例,對TACS系統(tǒng)的系統(tǒng)架構(gòu)和關(guān)鍵系統(tǒng)優(yōu)勢進行了解讀。結(jié)合現(xiàn)有經(jīng)驗,對系統(tǒng)優(yōu)勢進行了量化分析。
關(guān)鍵詞 列車自主運行系統(tǒng);信號系統(tǒng);移動授權(quán);移動閉塞;車車通信
中圖分類號 U284.48 文獻標識碼 A 文章編號 2096-8949(2022)05-0001-03
0 概述
近年來,隨著城市軌道交通行業(yè)的快速發(fā)展,傳統(tǒng)CBTC系統(tǒng)技術(shù)的逐步成熟,對于信號系統(tǒng)的智能化、輕型化、便捷性及低成本等方面提出了更高的要求。
為解決以上痛點,由中國第一個具有完全自主知識產(chǎn)權(quán)的列車自主運行系統(tǒng)(以下簡稱“TACS系統(tǒng)”)信號系統(tǒng)應(yīng)運而生。TACS系統(tǒng)采用一種全新的信號系統(tǒng)控制理念,是以列車為核心,基于車車通信,采用資源管理的理念,以信號車輛深度融合為特征,實現(xiàn)列車運行方式由自動化向自主化轉(zhuǎn)變的一種全新系統(tǒng)制式[1]。相比于傳統(tǒng)CBTC系統(tǒng),系統(tǒng)技術(shù)優(yōu)勢明顯。
TACS系統(tǒng)是在技術(shù)創(chuàng)新上真正實現(xiàn)國際引領(lǐng)的列車運行控制系統(tǒng),實現(xiàn)了中國軌道交通裝備從跟跑、并跑到領(lǐng)跑的跨越,揭開了中國城軌列車運行控制領(lǐng)域的嶄新一頁,將有效提升中國城軌裝備的國際競爭力。
目前,TACS系統(tǒng)已在國內(nèi)首次實現(xiàn)車輛和信號的深度融合,顯著提高城市軌道交通列控系統(tǒng)的智能化水平。
1 系統(tǒng)構(gòu)成
TACS系統(tǒng)相比傳統(tǒng)CBTC系統(tǒng),在設(shè)備構(gòu)成上進行了精簡。按照設(shè)備所屬的區(qū)域劃分,主要包括車載設(shè)備和軌旁設(shè)備兩大部分[2]。
1.1 車載設(shè)備
車載設(shè)備主要包括OBC(車載控制器)、速度傳感器、應(yīng)答器讀取單元、無線天線、列車顯示器等。與傳統(tǒng)CBTC系統(tǒng)相比,硬件配置沒有變化。主要車載控制器的系統(tǒng)軟件及接口協(xié)議有所增加。
1.2 軌旁設(shè)備
軌旁設(shè)備主要包括車站設(shè)備、車輛段設(shè)備、控制中心設(shè)備。與傳統(tǒng)CBTC系統(tǒng)相比,軌旁設(shè)備OC(地面目標控制器)替代原來的ZC(區(qū)域控制器)和CBI(聯(lián)鎖),并取消了ATS站機。將傳統(tǒng) CBTC系統(tǒng)中CBI和ZC設(shè)備的功能集成到了TACS 系統(tǒng)的OBC中,通過前后列車之間的通信去實現(xiàn)列車主動進路和列車自主防護的功能交互。
2 系統(tǒng)原理
TACS系統(tǒng)通過列車之間的直接通信方式實現(xiàn)列車自主進路、自主防護、自主運行、自主調(diào)整的直接自主控制[3-5]。與傳統(tǒng)CBTC系統(tǒng)的基于ZC管理列車及間隔防護,CC主動運行控制和防護,與ZC間接控制列車的控制方式相比,減少了控制節(jié)點,并提升運行能力,自主運行控制為智能、智慧提供了基礎(chǔ)底盤。
TACS系統(tǒng)控制流程如下:
(1)ATS下發(fā)時刻表或?qū)崟r人工進路命令。
(2)注冊列車并查詢資源。
(3)OC負責登記列車并轉(zhuǎn)發(fā)資源登記信息。
(4)列車向前車申請資源。
(5)前車釋放資源,并在OC更新登記實體資源。
3 系統(tǒng)優(yōu)勢
TACS系統(tǒng)相比于傳統(tǒng)CBTC系統(tǒng),主要有資源離散、功能內(nèi)聚、自主自律、弱中心化等系統(tǒng)優(yōu)勢。結(jié)合傳統(tǒng)CBTC系統(tǒng)和TACS系統(tǒng)的架構(gòu)和邏輯差異對比,從以下幾個方面,對TACS系統(tǒng)關(guān)鍵優(yōu)勢進行了分析探究。
3.1 扁平化架構(gòu)縮短控制鏈路
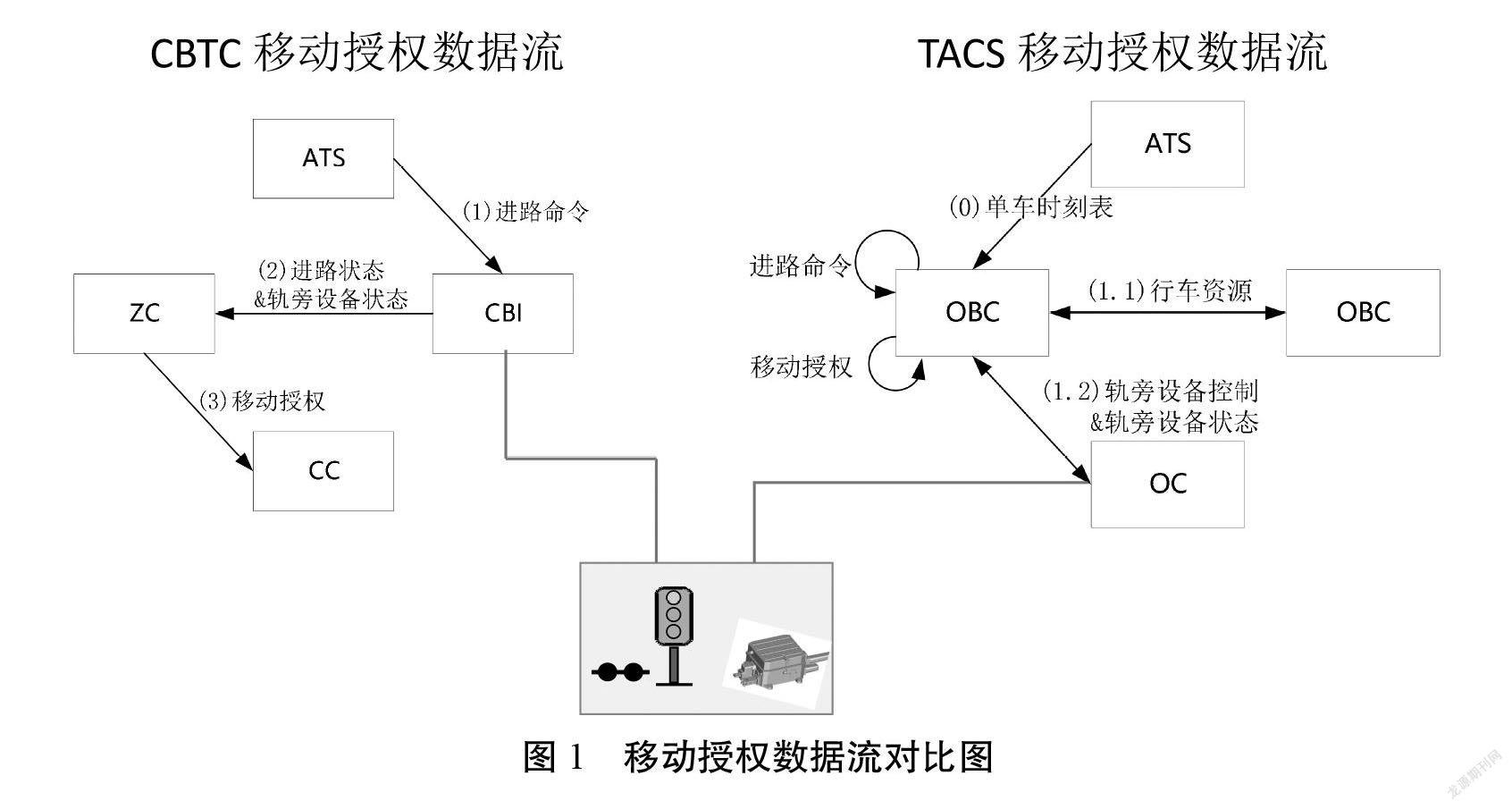
TACS系統(tǒng)對移動閉塞追蹤控制的數(shù)據(jù)流進行了調(diào)整,移動授權(quán)數(shù)據(jù)流對比如圖1所示,減少控制鏈路級聯(lián),一定程度上提升系統(tǒng)響應(yīng)性能及系統(tǒng)安全性,并且縮短了追蹤間隔。
3.2 自主進路、自主防護、自主調(diào)整
從列車智能化程度來講,TACS列車相對于CBTC列車更“聰明”,車車通信,具備自主進路、自主防護、自動駕駛和自主調(diào)整功能。 自主控制原理示意圖如圖2所示。
(1)自主進路:列車自主下載本車運行計劃,并采用基于資源管理的安全策略,保證進路安全。
(2)自主防護:列車根據(jù)獲取資源等信息,動態(tài)計算移動授權(quán),實現(xiàn)自主防護。
(3)自主調(diào)整:基于車載運行時刻表,在一定范圍內(nèi)實現(xiàn)列車自主調(diào)整功能。
3.3 站臺連續(xù)追蹤
TACS系統(tǒng)在進行列車追蹤時,前車已經(jīng)啟動,且出清站臺后,后車就可判斷前車的移動授權(quán)長度可以正常使用,此時,后車可聯(lián)系追蹤前車進入站臺。根據(jù)IEEE1474,1—6.2所述, ATO在ATP防護下,應(yīng)控制列車不使其在僅部分進入站臺時停車[6],基于此進行測算,TACS系統(tǒng)的站臺追蹤間隔可提升10%以上。
3.4 靈活的進路控制
TACS系統(tǒng)是基于資源占用移動授權(quán),不依賴于進路鎖閉,因此列車移動授權(quán)的方向取決于列車的方向,以列車為始端,可建立任意方向和終點的進路,且移動閉塞是可以任意移動的[7]。鑒于此控制策略,可在如下幾種場景中進行更加靈活的進路控制。
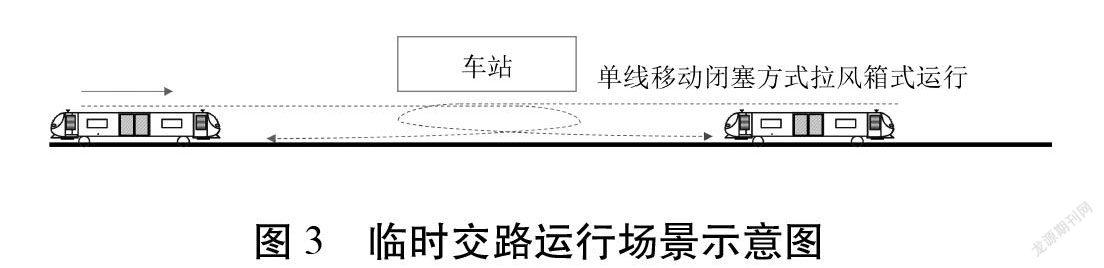
3.4.1 臨時交路運行
TACS系統(tǒng)在進行臨時交路運行控制時,具備如下兩個優(yōu)勢,在圖3中進行示意。
(1)任意站臺,任意路徑,不需要提前布置雙向出站信號機。
(2)雙向移動閉塞方式運行,臨站發(fā)車無任何約束。
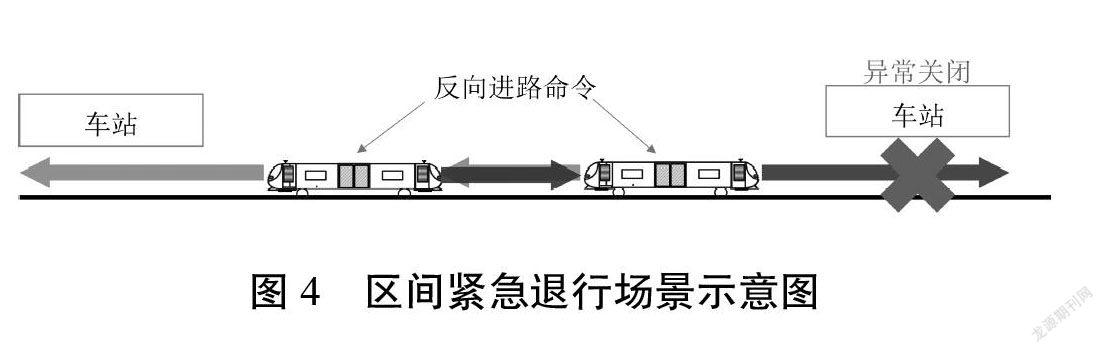
3.4.2 區(qū)間緊急退行
TACS系統(tǒng)在進行區(qū)間緊急退行時,具備如下兩個優(yōu)勢,在圖4中進行了示意。
(1)全過程FAM模式運行,系統(tǒng)保障安全;而在傳統(tǒng)CBTC系統(tǒng)下需要以RM/EUM模式逆行,人工防護。
(2)區(qū)間單車情況下,可縮短故障處理時間到原先的1/4~1/3;在多車情況下,處置效率提升更加明顯。
3.4.3 工程車作業(yè)
根據(jù)工程車是否裝備了TACS系統(tǒng)的車載控制系統(tǒng),TACS系統(tǒng)在進行系統(tǒng)防護時,采用了不同的策略:
(1)對于未裝備TACS車載控制系統(tǒng)的工程車,工程車可基于降級進路的方式運行。TACS系統(tǒng)基于自主控制優(yōu)勢,可以對作業(yè)的工程車進行靈活的安全防護。
(2)對于裝備TACS車載控制系統(tǒng)的工程車,可以充分發(fā)揮TACS系統(tǒng)靈活進路的特點。在系統(tǒng)防護下,可以最高允許速度運行,大大提升作業(yè)效率;可在任意位置進行折返,排列任意進路,作業(yè)靈活性大大提升。尤其對于線路長、區(qū)間大的市域等線路,系統(tǒng)的優(yōu)勢更加明顯。
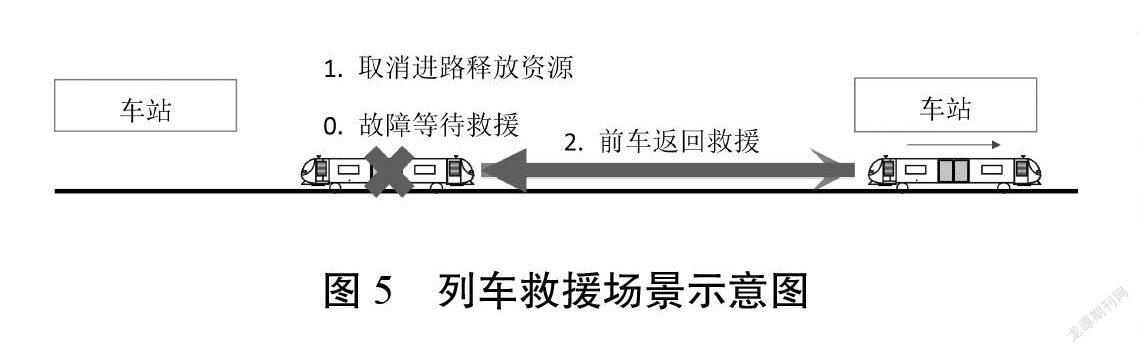
3.4.4 列車救援
當車輛正線出現(xiàn)故障等需要進行緊急救援時,TACS系統(tǒng)可以釋放所有占用資源,方便其他列車接近。救援列車可以在TACS系統(tǒng)的防護下,以最高運行速度接近救援列車。在列車完成連掛后,仍可以按照RM模式的方式進行駕駛。后車只需要間隔一個計軸區(qū)段。如圖5所示,為系統(tǒng)救援場景的示意圖。
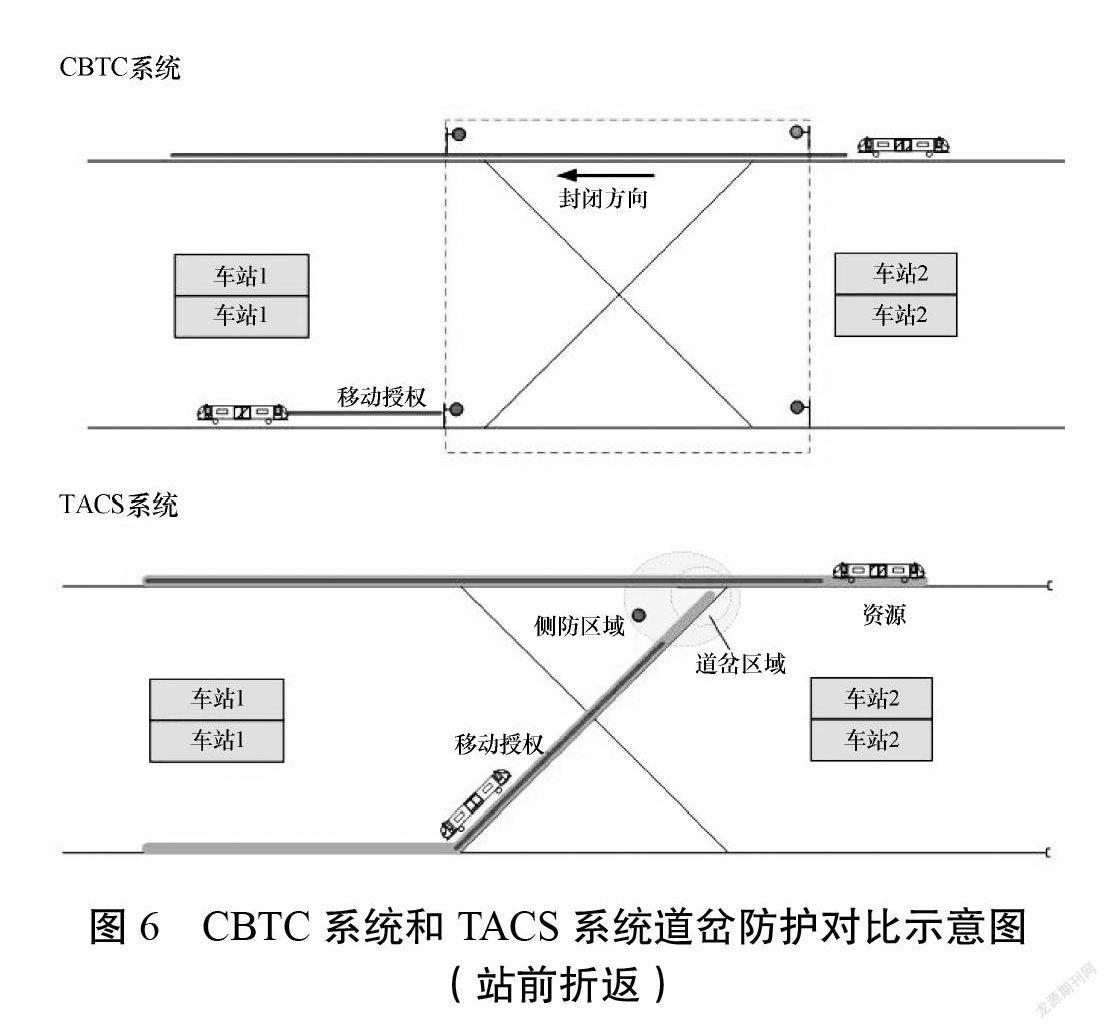
3.5 道岔的利用和防護
TACS系統(tǒng)采用道岔資源離散化管理和獨立的功能防護,在進路控制時更加靈活,可以有效提升系統(tǒng)站前折返間隔效率[8]。如圖6所示,TACS系統(tǒng)與CBTC系統(tǒng)在進行站前折返時的道岔側(cè)防策略對比示意圖,TACS系統(tǒng)采用移動閉塞策略,而傳統(tǒng)CBTC系統(tǒng)采用整體鎖閉策略。TACS系統(tǒng)的移動閉塞策略,在進行站臺折返時,可將站前折返效率提升15%~20%。
3.6 弱中心化
TACS系統(tǒng)采用更趨分散的控制,區(qū)域設(shè)備少,有更高的系統(tǒng)可用性。進路和移動授權(quán)功能的上車,將系統(tǒng)故障由面故障降低為點故障,系統(tǒng)可用性可提升0.01%左右。
基于資源分散管理和車載功能高內(nèi)聚,車地接口和邏輯大幅簡化;取消了軌旁區(qū)域控制器,消除了分區(qū)控制間的跨區(qū)控制移交和區(qū)域間的耦合。
取消了傳統(tǒng)CBTC設(shè)計聯(lián)鎖控制區(qū)域和區(qū)域控制器控制區(qū)域的劃分,以及在區(qū)域控制器控制交疊區(qū)內(nèi)復(fù)雜的控制移交過程。TAC跨區(qū)、跨線無重疊區(qū),互聯(lián)互通實現(xiàn)以及延伸線接入設(shè)計及調(diào)試更簡單。
3.7 電子地圖下地
傳統(tǒng)CBTC系統(tǒng)架構(gòu),車載控制器需存儲線網(wǎng)所有線路的電子地圖,電子地圖成為互聯(lián)互通線路關(guān)鍵耦合點。任意一條線路中有電子地圖的變更,其他互聯(lián)互通線路都要進行軟件修改。從而增加軟件修改、測試、安全認證和升級等一系列工作。重慶互聯(lián)互通線路是國內(nèi)互聯(lián)互通線路試點規(guī)劃城市[9],根據(jù)重慶互聯(lián)互通線路開通后的運行情況,基本上90%以上的信號系統(tǒng)軟件升級的事由,是因有延伸線接入,數(shù)據(jù)修正引起的。
TACS系統(tǒng)電子地圖由軌旁O(shè)C通過無線通信發(fā)送至車載控制器,且不受限于線網(wǎng)規(guī)模,更易于實現(xiàn)線網(wǎng)內(nèi)的互聯(lián)互通運行。列車在進入OC控區(qū)后會先請求并下載此OC控區(qū)的電子地圖。電子地圖與線路物理區(qū)域耦合,使得系統(tǒng)不受線路分段接入或個別區(qū)域線路數(shù)據(jù)修改的影響。
4 結(jié)束語
TACS系統(tǒng)自身具備智能、安全、可靠、高效、靈活、互聯(lián)互通、便捷改造等諸多優(yōu)勢,一定程度上降低了國家對于城市軌道交通基礎(chǔ)建設(shè)的總體投資,同時提升了城市軌道交通整體服務(wù)質(zhì)量。對這一新型列車自主運行系統(tǒng)的全面推廣應(yīng)用,勢必會助推中國城市軌道交通的高質(zhì)量發(fā)展。
參考文獻
[1]王鵬. 車-車通信技術(shù)在列控系統(tǒng)車載設(shè)備中的應(yīng)用研究[D]. 北京:北京交通大學(xué), 2017.
[2]孔軍, 宋丹. 城市軌道交通車-車通信系統(tǒng)融合設(shè)計[J]. 現(xiàn)代城市軌道交通, 2021(9): 13-17.
[3]汪小勇. 城市軌道交通基于車-車通信的列車自主運行系統(tǒng)探討[J]. 中國鐵路, 2020(9): 77-81.
[4]羅情平, 吳昊, 陳麗君. 基于車-車通信的列車自主運行系統(tǒng)研究[J]. 城市軌道交通研究, 2018(7): 46-49.
[5]郜洪民, 賓海豐, 付連著. 我國城市軌道交通信號技術(shù)自主化發(fā)展策略探討[J]. 城市軌道交通研究, 2012,15(4): 4-7.
[6]Ahmed Miske El Hadrami, 劉會明. 軌道交通的自主化列車控制和自主化運營[J]. 城市軌道交通研究, 2018(5): 37-39.
[7]溫杜仲. 基于車-車通信技術(shù)的新型城市軌道交通信號系統(tǒng)研究[J]. 中國新通信, 2016(24): 122-123.
[8]鄭藝, 張韋, 沈濤, 等. 基于車-車通信的CBTC系統(tǒng)自動折返方案[J]. 控制與信息技術(shù), 2019(5): 68-71.
[9]李中浩. 城市軌道交通 CBTC互聯(lián)互通發(fā)展趨勢及建議[J]. 城市軌道交通研究, 2018(5): 12-15.
