智能網聯車輛隊列緊急工況控制策略設計*
2022-04-07 03:29:18李鵬飛羅禹貢孔偉偉
汽車工程 2022年3期
關鍵詞:控制策略
李鵬飛,羅禹貢,劉 暢,孔偉偉,2
(1.清華大學車輛與運載學院,汽車安全與節能國家重點實驗室,北京 100084;2.中國農業大學工學院,北京 100083)
前言
日益增長的交通運輸需求使人們面臨越來越嚴峻的交通擁堵、道路安全和環境污染等問題。智能網聯車輛隊列具有顯著提高行車安全性、改善燃油經濟性、提升道路通行效率、提高運輸能力等優勢,已成為國內外汽車學術界和產業界的研究熱點。現有隊列研究主要集中在隊列穩定性、節能性控制,或是組隊、入隊、離隊控制策略研究,但缺乏針對緊急工況的車輛隊列控制研究。在實際應用中,高速公路車輛隊列不可避免會面臨被其他車輛干擾或需要緊急制動的緊急工況。因此,針對緊急工況開展車輛隊列控制研究具有重要意義,也是車輛隊列邁向產業化應用必須解決的難題。
隊列緊急制動和他車插入隊列是很危險的兩種緊急工況。當一輛車以大于4 m/s的減速度進行制動時,被認定為處于緊急制動狀態。因道路或交通原因,隊列中任一車輛觸發緊急制動,導致其后方所有跟隨車輛也要進行緊急制動,這種工況稱為隊列緊急制動。Zheng等指出,當隊列車輛制動能力相同時,僅依靠駕駛員采取制動措施的事故率很高。他車插入隊列,則指某一非隊列車輛突然駛入隊列車輛之間的工況。這種情況下非隊列車輛的行為對于隊列車輛來說有很強的不確定性,車輛隊列在穩定行駛狀態下的控制策略不再適用,如果不調整控制策略很有可能出現危險。
比較早的一些隊列制動相關的研究,如文獻[6]和文獻[7],常常采用與隊列穩定行駛相同的控制算法進行制動,討論隊列緊急制動時的控制效果。文獻[8]和文獻[9]中雖然提出了一些新的方法,但是還不適用于實際情況。Liu等采用虛擬的方法進行隊列緊急制動控制,但該研究沒有利用車間通信進行協同感知,對于緊急工況的反應相對滯后。Lu等提出了一種以總碰撞能量最小為控制目標的MPC方法,然而MPC方法對算力的要求很高,而且該研究僅采用簡單的質點動力學模型,也不符合實際應用場景。還有的研究針對實際應用場景設計了控制策略,卻并沒有進行控制系統的開發,也未考慮與其他工況的切換控制。有的研究設計了隊列制動的控制策略并完成了實車實驗,但在仿真和實驗中考慮的制動減速度都比較小(不超過-3.5 m/s),不適用于隊列緊急制動工況。
關于他車插入隊列,目前相關的研究還比較少,大部分研究都只考慮單車面臨其他車輛并道進入自車前方的場景。Xie等定義了一個接近指數,用于評估并道場景下的碰撞風險。Zhou等用最優控制方法研究了并入車輛和直行車輛的速度規劃。另一部分研究關注了并線車輛對于車輛的巡航控制的影響,卻沒有能在隊列場景下考慮問題。蔡英鳳等針對自適應巡航控制系統受旁車并線影響產生的制動干預時機不確定性問題,提出了一種采用旁道車輛并線行為進行優化的自適應巡航控制策略。張濤等用一種基于NAR神經網絡學習的迭代循環預測算法計算出旁車的橫向換道軌跡,并提出了一種考慮并線概率的跟車距離策略。此外,Vissers等雖然給出了一種應對他車插入隊列的控制策略,但是并沒有進行控制系統的開發,也沒有考慮與其他工況的切換控制。
綜上所述,目前針對他車插入隊列工況下的控制研究較少,面向隊列緊急制動和他車插入隊列這兩種緊急危險工況的車輛隊列控制策略研究尚不成熟,更缺少緊急工況與非緊急工況之間的控制切換研究。因此,本文旨在面向高速公路場景提出車輛隊列緊急工況下的控制策略及控制系統。首先,建立車輛控制系統分層架構。其次,針對策略層設計兩種緊急工況的控制策略和不同工況間的控制切換策略。最后,搭建PreScan/Simulink聯合仿真平臺,進行五車隊列在緊急工況下的仿真驗證,并討論通信時延對控制性能的影響。
1 車輛隊列控制系統分層架構
國外較早地對汽車隊列開展研究,比如美國PATH項目、荷蘭GCDC項目、歐洲ENSEMBLE項目等。以上項目中,車輛隊列控制系統均采用了分層架構,該種架構具有結構清晰、功能劃分明確的優點。借鑒分層架構的設計思路,本研究建立如圖1所示的車輛隊列控制系統分層架構,將整個控制系統劃分為策略層和控制層。
如圖1所示,策略層接收毫米波雷達、攝像頭等傳感器信息以及V2V通信信息,根據制定的控制策略判斷隊列所處的工況,包括非緊急工況、隊列緊急制動、他車插入隊列,并根據所設計的各工況下隊列控制策略以及不同工況間控制切換策略,選擇出合適的車輛縱、橫向控制器,發送給控制層。
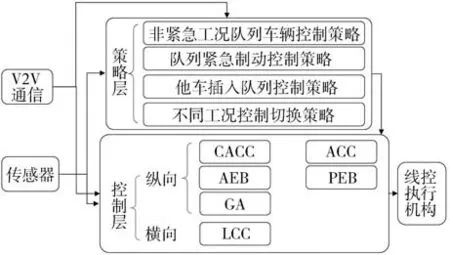
圖1 系統分層架構示意圖
控制層由多種車輛縱、橫向控制器組成。其中,協同自適應巡航CACC(cooperative adaptive cruise control)、自適應巡航ACC(adaptive cruise control)、自動緊急制動AEB(autonomous emergency braking)、隊列緊急制動PEB(platoon emergency braking)、車間距調整GA(gap adjustment)這5個控制器用于實現車輛的縱向控制,車道居中控制LCC(lane centering control)用于實現車輛的橫向控制。控制層接收策略層的決策信息,激活被選中的控制器。控制器利用V2V通信和自車傳感器獲取的數據計算用于車輛的節氣門開度、制動壓力和轉向盤轉角的控制指令。這些指令信息最終由控制層輸出給線控執行機構,實現對車輛的控制。
控制層中CACC、ACC等控制方法已較為成熟,本研究主要針對策略層進行設計。其中,非緊急工況下的隊列車輛控制策略是本研究團隊提出的隊列穩定行駛控制策略。因此,本文重點設計應對隊列緊急制動和他車插入隊列這兩種緊急工況的控制策略,以及不同工況間的控制切換策略。
2 隊列緊急工況控制策略層設計
2.1 隊列緊急制動控制策略
圖2展示了隊列緊急制動工況的一個實例:一臺干擾車輛突然變道,出現在隊列第2輛車前方,較小的車間距和較大的相對車速達到了觸發AEB的TTC條件,導致該車進行緊急制動,其后的隊列車輛也隨即進行緊急制動。
類似圖2的場景有很多種,隊列中任何一輛車都可能因為某種突發狀況進入緊急制動狀態。為充分考慮可能出現的各種隊列緊急制動工況,制定了如圖3所示的控制策略。
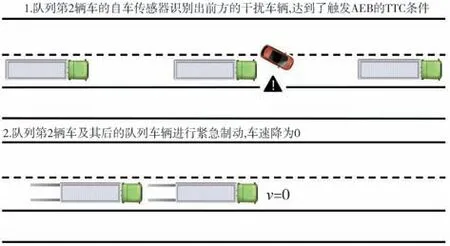
圖2 隊列緊急制動場景示意圖
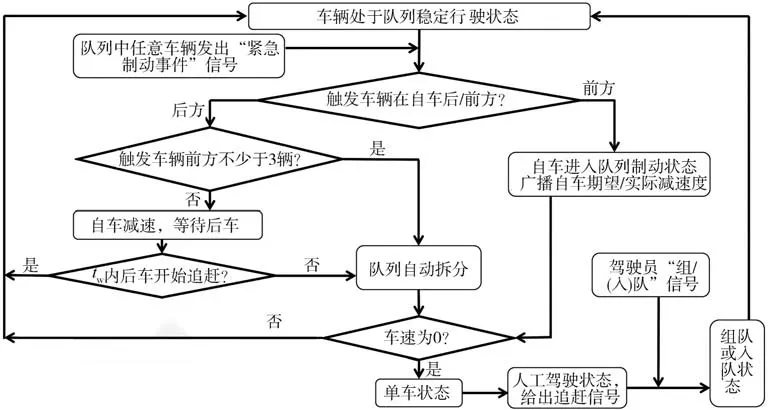
圖3 隊列緊急制動控制策略
定義隊列中第一個進入緊急制動狀態的車輛為觸發車輛,它會將相關信息廣播出去。收到制動信號的車輛將根據自身與觸發車輛的相對位置采取相應的措施。
(1)如果觸發車輛位于自車后方,需要根據觸發車輛前方的車輛數目來決定控制策略。
a.如果在觸發車輛前方有不少于3輛車,則此時將隊列自動拆分為:觸發車輛前方的隊列保持原狀態繼續行駛狀態和觸發車輛及其后跟隨車輛進行緊急制動狀態。
b.如果觸發車輛前方不超過兩輛車,則此時自車減速至v(比如高速公路最低限速60 km/h),等待后車。如果等待t(比如20 s)后后車仍未發出追趕信號,則將隊列拆分為:前方車輛隊列繼續行駛并逐漸恢復原巡航車速;如果t內緊急情況解除,后車開始追趕,則自車等待后車追上,直至追趕車輛全部重新入隊,隨后逐漸恢復原巡航車速。
(2)如果觸發車輛位于自車前方,自車將直接進入緊急制動狀態。這時,車輛需要根據前車的減速度信息來確定自車的減速度,并廣播自車的期望減速度和實際減速度。
2.2 他車插入隊列控制策略
圖4為他車插入隊列場景示意圖。該工況主要包括兩種情形,即他車插入隊列且長時間停留和他車插入隊列并快速駛離。
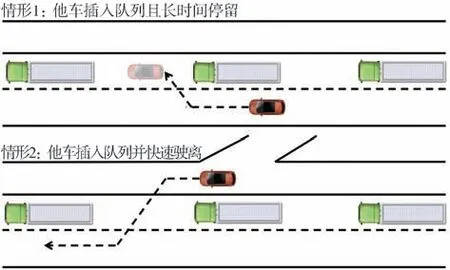
圖4 他車插入隊列場景示意圖
與圖2不同,圖4場景中非隊列車輛與隊列車輛之間車間距較大,且沒有較大的相對速度,短時間內沒有碰撞風險,不會觸發隊列車輛的AEB。為應對圖4展示的兩種可能情況,制定了如圖5所示的控制策略。
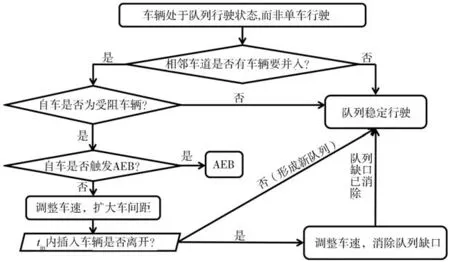
圖5 其他車輛插入隊列控制策略
當有其他車輛插入隊列時,稱插入車輛后方的第1輛隊列車輛為“受阻車輛”,稱插入位置為“隊列缺口”。受阻車輛通過自車傳感器檢測插入車輛從旁邊車道靠近、并入當前車道的駕駛行為,實時計算碰撞風險并將相關信息廣播出去。
(1)當存在碰撞風險時,AEB被觸發,轉化為隊列緊急制動工況。
(2)當無碰撞風險時,檢測到插入車輛完全并入當前車道后,受阻車輛與其后方車輛一同減速,擴大與插入車輛的間距。
b.如果t內,插入車輛保持在當前車道,則受阻車輛及其后方車輛與前方隊列分離,受阻車輛駕駛權交還給駕駛員,作為后方隊列的頭車繼續行駛。
2.3 不同工況控制切換策略
在制定了緊急工況下的控制策略后,還需要有不同工況下的控制切換策略,才能形成完整的控制閉環。根據可能面臨的緊急工況和非緊急工況,總結出隊列車輛可能處于的5種狀態:人工駕駛、緊急制動、入隊、隊列穩定行駛、受阻行駛。本研究設計了不同車輛狀態之間的切換規則和條件,并制定了各狀態下的車輛縱向控制器選擇方案,如圖6所示。
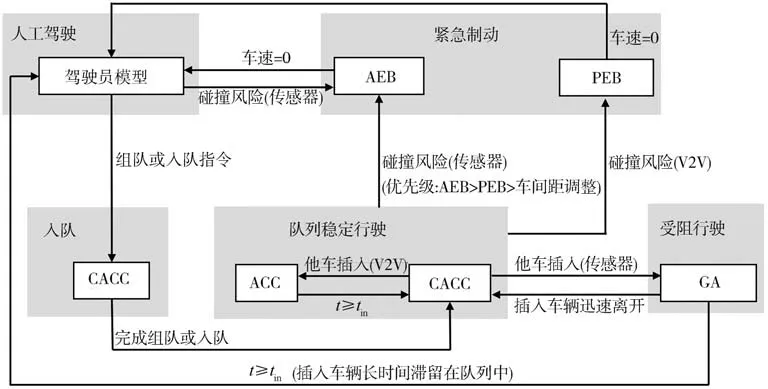
圖6 控制切換策略示意圖
(1)當隊列在穩定行駛時,頭車處于人工駕駛狀態,由駕駛員控制;跟隨車處于隊列穩定行駛狀態,采用CACC控制器。
(2)當隊列遭遇隊列緊急制動工況時,按以下兩種情況分別控制,即
a.當自車傳感器檢測到碰撞風險時,就會進入緊急制動狀態,切換到AEB控制器進行制動。
b.當車輛通過V2V通信得知前方有車輛進行緊急制動時,也會進入緊急制動狀態,此時則采用PEB控制器。
剎停后,車輛駕駛權將交還給駕駛員。
(3)駕駛員給出組隊或入隊指令后,車輛轉移到入隊狀態,采用CACC控制器。需要注意的是,入隊和隊列穩定行駛兩種狀態的CACC控制器采用兩組不同的控制參數。完成組隊或入隊后,車輛轉移到隊列穩定行駛狀態,采用CACC控制器。
食品添加劑的儲存與使用應符合下列要求:食品添加劑應有專人采購、專人保管、專人領用、專人登記、專柜保存;食品添加劑的使用量與使用范圍應符合GB2760的規定,并如實記錄領用、使用情況;計量食品添加劑的電子秤等應定期做好檢定,保留有效的檢定證明;經營者不得采購、貯存和使用亞硝酸鹽。
(4)當隊列遭遇他車插入隊列工況時,整個過程分為兩個階段,每個階段包括兩種情況。
第一階段,識別插入車輛并作出調整:
a.當自車傳感器檢測到前方有干擾車輛進入時,會切換到受阻行駛狀態,采用車間距調整控制器將車間距擴大至安全范圍。
b.當車輛通過V2V得知前方有車輛插入隊列時,與頭車的間距信息不可知,CACC控制器不再適用,因此轉而采用ACC控制器。
第二階段,根據插入車輛的以下兩種不同行為采取相應策略:
a.如果插入車輛很快離開,受阻車輛會回到隊列穩定行駛狀態,切換回CACC控制器,后方車輛也切換回CACC控制器。
b.如果插入車輛長時間停留,受阻車輛會變為新頭車,轉移到人工駕駛狀態,由駕駛員接管,后方車輛則切換回CACC控制器,變為新隊列的成員。
以上不同工況控制切換策略,不僅給出了處理多種不同緊急工況的策略,而且給出了緊急工況解除后使控制系統重新回到非緊急工況的方案,實現了完整的控制閉環,從而使控制系統具有連續處理不同緊急工況的能力。
3 仿真驗證
為驗證控制策略的有效性,搭建了PreScan/Simulink聯合仿真平臺。基于此車輛隊列仿真平臺,進行了緊急工況下的仿真驗證。首先,設計了一種依次經歷頭車觸發緊急制動、他車插入隊列并快速駛離、第3輛車觸發緊急制動、他車插入隊列且長時間停留這4個緊急工況的復雜綜合場景,并在該場景下進行仿真,驗證控制系統連續處理緊急工況的能力。然后,在不同的通信時延下進行仿真,討論通信時延對于控制效果的影響。
3.1 復雜綜合場景仿真
3.1.1 仿真設計
采用PreScan提供的車輛模型,模型參數如表1所示。5臺隊列車輛依次稱作vehicle_i(i=1~5)。毫米波雷達的參數設置如表2所示。
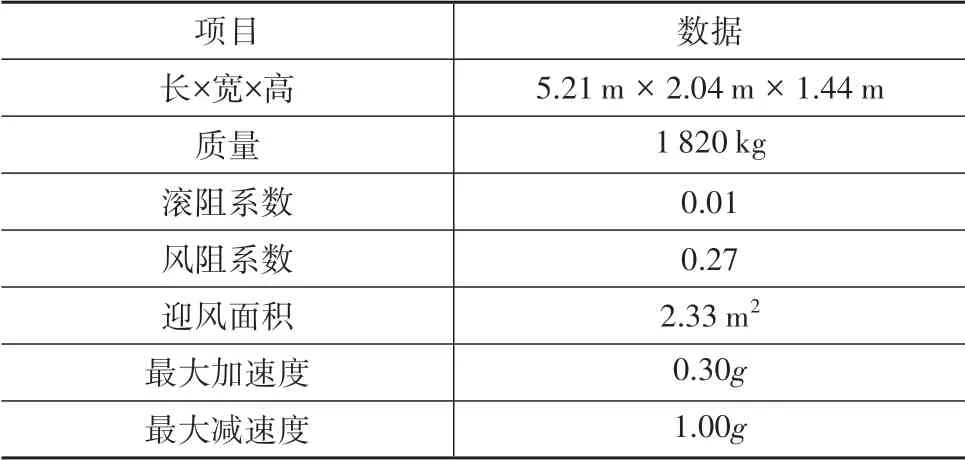
表1 車輛模型參數
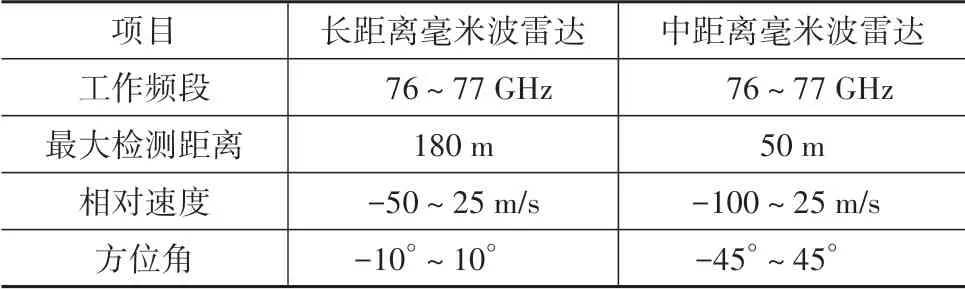
表2 毫米波雷達參數
復雜綜合場景的道路模型如圖7所示,由1條主干道、3條下匝道和2條上匝道組成。按照設置,隊列從左下角的道路起點出發,依次經歷頭車觸發緊急制動、他車插入隊列并快速駛離、第3輛車觸發緊急制動、他車插入隊列且長時間停留4個緊急工況。4個緊急工況之間由非緊急工況連接,形成整個綜合仿真場景。
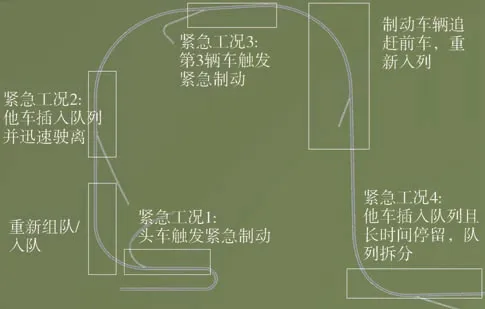
圖7 道路模型-連續緊急工況
3.1.2 仿真結果與分析
采用隊列車輛速度曲線和隊列車輛實際間距曲線對控制效果進行分析。連續緊急工況下的仿真結果如圖8所示。
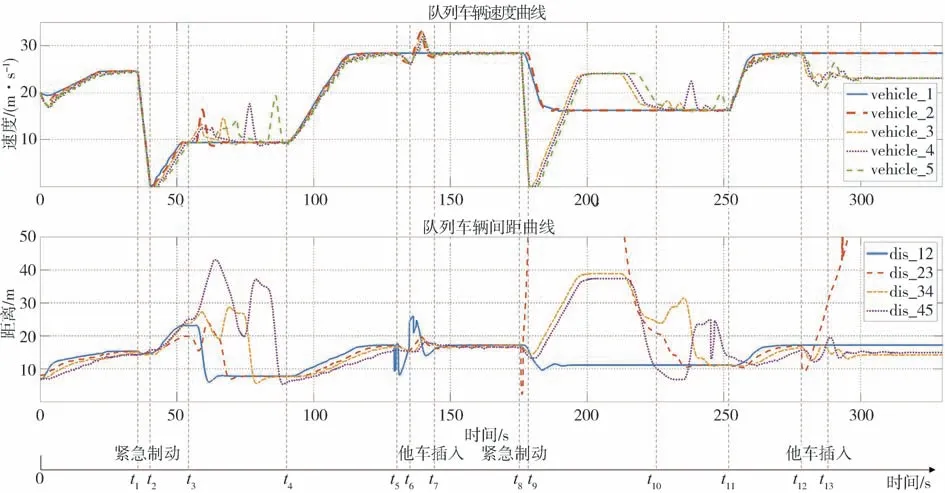
圖8 隊列各車輛速度曲線與車間距曲線
0~t:隊列逐漸加速至25 m/s并保持勻速行駛。
t時刻(約36 s):一輛干擾車輛突然在隊列頭車前變道,觸發頭車的AEB,進而導致跟隨車輛進行緊急制動。
t~t:如圖9(a)所示,各車輛減速到0,車間距控制在15 m左右,相比隊列穩定行駛狀態變化量不超過2 m。隨后,各車輛均進入人工駕駛狀態,按照預設的駕駛員期望速度加速到10 m/s。
t~t:各跟隨車依次組隊入隊。
t時刻(約130 s):一輛干擾車輛從vehicle_2前進入隊列中。如圖9(b)所示,vehicle_2在檢測到插入的外來車輛后,適當減速拉大與插入車輛的車間距。
t~t:插入車輛駛離。如圖9(b)所示,vehicle_2加速追趕前車,縮小與頭車的車間距。
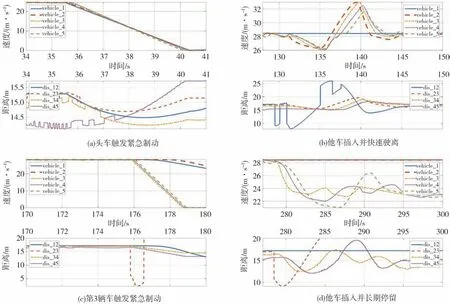
圖9 隊列各車輛速度曲線與車間距曲線(各緊急工況)
t時刻(約176 s):一輛干擾車輛從vehicle_3前迅速穿行而過。因為與vehicle_3距離很近,達到了AEB的TTC條件,導致隊列中靠后的3輛車剎停。如圖9(c)所示,車間距控制在14 m左右,相比隊列穩定行駛狀態減小量不超過4 m。而位于前方的兩輛車則逐漸減速至17 m/s(約為60 km/h),等待后車追上。
t~t:后三車由駕駛員駕駛,追趕前車。
t~t:后三車依次重新入隊。
t時刻(約278 s):一輛干擾車輛從vehicle_3前插入隊列,如圖9(d)所示,vehicle_3適當減速擴大車間距。
t時刻(約288 s):以干擾車輛為界,隊列拆分,分別以兩車隊列、三車隊列繼續行駛。
當隊列頭車觸發AEB時,后方車輛能通過V2V通信得到相關信息,整個隊列能夠安全制動。而且,各車輛能在駕駛員的駕駛下重新組成隊列繼續行駛。當隊列中第3輛車觸發緊急制動時,后3輛車能夠安全制動,并在駕駛員駕駛下追趕正在等待的前方隊列,依次重新入隊。當有非隊列車輛插入隊列中(且未觸發隊列車輛AEB)時,受阻車輛能夠識別出插入車輛,并拉大車間距。插入車輛短時間內離開后,隊列能夠恢復原車間距繼續行駛。插入車輛長期停留在隊列中時,隊列能以插入車輛為界進行拆分,繼續行駛。
在上述由非緊急工況和4種緊急工況組成的復雜綜合場景中,車輛不僅可以實現各工況下安全、穩定行駛,更重要的是,實現了不同工況間的切換控制,在工況切換過程中有效保證了車輛安全,具備連續處理緊急工況的能力。
3.2 通信時延對控制效果的影響分析
在隊列緊急制動的各可能情況中,頭車觸發隊列緊急制動涉及到的制動車輛數最多,也最危險。在他車插入隊列的兩種可能情況中,相比于插入車輛長期停留,插入車輛快速駛離涉及到控制隊列車輛消除隊列缺口,對控制性能的要求更高。因此,頭車觸發隊列緊急制動和他車插入隊列并快速駛離這兩種工況對通信時延的要求更加嚴格,本研究選取這兩種工況探討通信時延對隊列緊急工況下控制效果的影響。
3.2.1 仿真設計
車輛模型和傳感器的設置保持不變。在他車插入隊列工況中,干擾車輛設置為在vehicle_2前插入隊列。
在仿真中,采用Burr概率時延模型,該模型由本研究團隊采用專用短距離通信DSRC(dedicatedshortrangecommunication)設備通過大量測試總結得出。其概率分布函數為
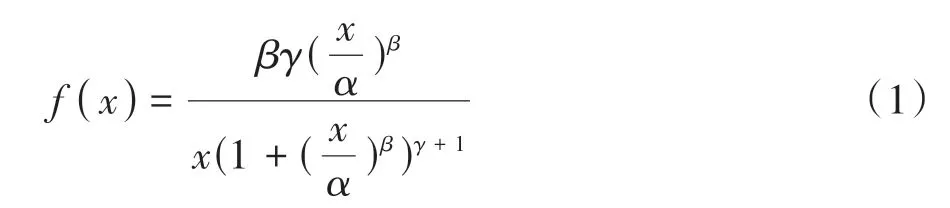
式中:x為時延;α、β、γ為參數。
文獻[17]中指出,Burr概率時延模型的最大概率時延由參數α基本確定。在仿真中,通過調整參數α來變更時延設置,并將其近似視作最大概率時延。在仿真中,分別取參數α為10、50、100、150、200和250。同時,令β=15,γ=0.3。
3.2.2 仿真結果與分析
圖10為不同時延設置下隊列中前兩輛車的車間距變化曲線(僅畫出緊急制動時段):36s左右,隊列觸發緊急制動;38s左右,車輛剎停。圖10中,隨著時延逐漸增大,車輛剎停后的車間距逐漸變小,從α=10時的12.5m減小到了α=250時的4.5m。在頭車已開始制動而后車還未收到消息時,后車依然保持原車速行駛,車間距因此減小。時延越大,車間距也就越小。
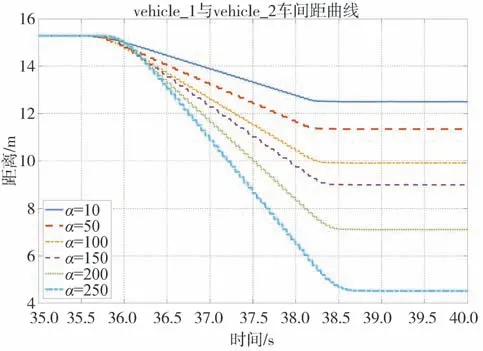
圖10 不同時延下緊急制動時段的隊列車輛與前車間距曲線
圖11 為不同時延設置下,他車插入隊列工況下的隊列車間距曲線。4張圖中,不同時延下,車間距均在8m以上,隊列能保持安全行駛。從圖11(a)可看出,前兩輛車的車間距曲線基本不隨時延發生變化,時延對于受阻車輛vehicle_2的影響并不大。從圖11(b)~圖11(d)則可看出,在隊列中位置靠后的vehicle_3、vehicle_4、vehicle_5車輛會受到一定程度的影響。隨著時延的增大,后3輛跟隨車與前車的間距曲線在干擾車輛離開后的隊列恢復過程中出現更大的波動。
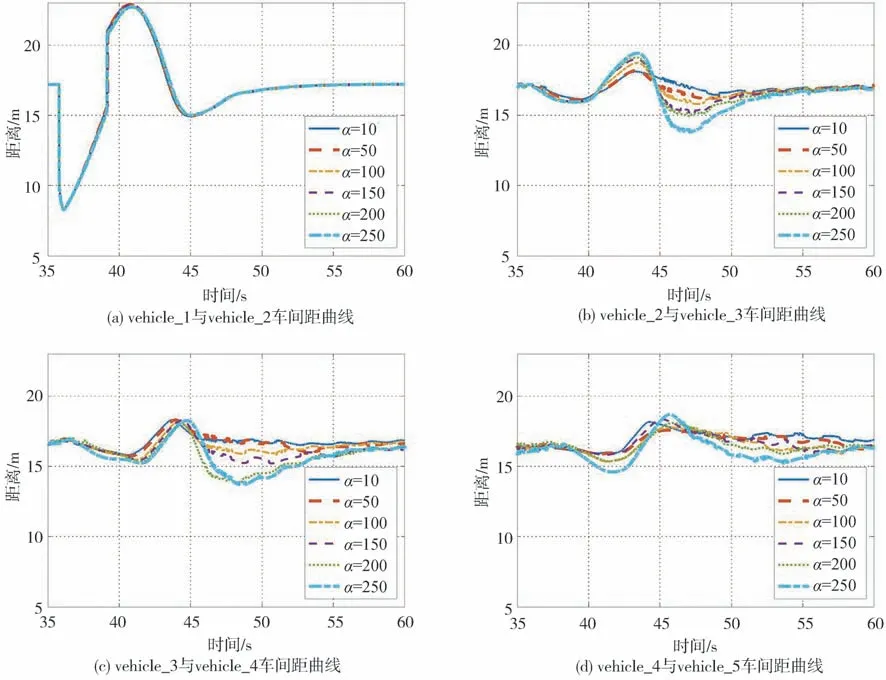
圖11 不同時延下他車插入時段的隊列車輛與前車間距曲線
綜上所述,通信時延越大,緊急工況下隊列的控制效果越差;在隊列緊急制動工況,隨著時延逐漸增大,車輛剎停后的車間距逐漸減小;在他車插入隊列工況下,時延越大,隊列在間距調整過程中的車間距波動越大。
4 結論
(1)針對高速公路上隊列緊急制動、他車插入隊列這兩種緊急工況,進行了隊列車輛控制策略的設計,并制定了不同緊急工況間、緊急工況與非緊急工況間的控制切換策略。基于上述策略,利用現有的L1級、L2級自動駕駛技術和隊列穩定行駛控制策略,設計了由策略層和控制層組成的智能網聯車輛隊列控制系統。
(2)基于PreScan和Simulink搭建了隊列聯合仿真平臺,設計了包含4種不同緊急工況的復雜驗證場景,完成了五車隊列在該場景下的仿真驗證。結果表明,該隊列車輛控制系統能有效處理這兩種緊急工況,并可實現不同工況的切換控制。與現有研究僅針對某單一工況或場景不同,該隊列控制系統可實現復雜綜合場景下的完整隊列控制。
(3)探討了通信時延對隊列緊急工況控制效果的影響。在隊列緊急制動工況下,隨著時延逐漸增大,車輛剎停后的車間距逐漸變小;在他車插入隊列工況下,時延越大,隊列在間距調整過程中的車間距波動越大。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36