面向高級自動駕駛的線控制動系統及壓力控制算法研究*
2022-04-07 03:29:18許炎武
汽車工程 2022年3期
關鍵詞:系統
初 亮,常 城,王 旭,趙 迪,許炎武
(1.吉林大學汽車工程學院,長春 130022;2.中國汽車技術研究中心有限公司,天津 300300)
前言
隨著汽車產業逐漸進入電動化和智能化時代,制動系統也由傳統液壓制動逐漸向線控制動發展。對于電動汽車,為了更好的實現再生制動功能并兼顧制動感覺,制動系統的解耦需求越來越高;對于自動駕駛汽車,美國汽車工程師學會(SAE)將其分為5個級別,其中第1級和第2級被稱為駕駛輔助系統,駕駛員仍需全程參與駕駛,3至5級被稱為高級自動駕駛系統,可以替代駕駛員進行自動駕駛,當系統有故障時仍可一定程度上實現自動駕駛,因此對于駕駛輔助系統,制動系統需要具有主動制動功能,同時具備傳統液壓制動備份,而對于高級自動駕駛車輛,傳統液壓制動備份不能滿足其高可靠性需求,因此需要對主動制動功能進行備份。
目前,針對線控制動系統的功能需求,國內外已經開展了許多研究,主要包括3個分支。第1個分支是電子液壓制動系統,代表產品有豐田ECB和博世HAS-hev等,這類系統采用無助力制動主缸作為操縱機構,通過踏板感覺模擬器模擬踏板感覺,利用液壓泵和高壓蓄能器作為穩定高壓源,并通過線性電磁閥對輪缸壓力進行調節。這類系統集成度高、功能全面,但結構復雜、造價高昂,而且采用高壓蓄能器,存在一定安全隱患。第2個分支為電子助力制動系統,如德國博世iBooster和日立EIDB,國內如上海匯眾、清華大學、吉林大學等也提出類似構型。這類系統與真空助力器工作原理類似,均為助力活塞與人力共同推動主缸,并具有隨動作用,通過控制電機調節助力活塞與踏板推桿的相對位置,在不改變踏板感覺情況下調節主缸壓力,因此可以在無踏板感覺模擬器情況下實現解耦,但其解耦能力有限,只能在較低制動強度范圍內實現,通常需搭配ESC液壓單元來實現更大范圍的解耦和協調能量回收。第3個分支為電動主缸式制動系統,如本田ESB。這類系統有兩個主缸:備份主缸和主動增壓主缸。備份主缸為駕駛員直接操作的制動操縱裝置,通過模擬器切斷電磁閥與踏板感覺模擬器相連,并通過主缸切斷電磁閥與增壓主缸相連。其工作原理與電子液壓制動系統類似,但增壓裝置替換為由電機驅動的液壓缸;與電子助力制動系統相比,這類系統依然具有踏板感覺模擬器,無需采用復雜控制方法來保證踏板感覺。電動主缸式系統適用范圍廣,可匹配不同液壓控制單元,可有效控制成本,而且結構簡單,控制算法簡單。為了在無踏板輸入情況下獨立調節制動壓力,上述幾種線控制動系統均將制動踏板與制動壓力解耦,可以說解耦是線控制動的前提條件,然而它們只能在常規狀態下保持解耦,一旦發生單點故障,制動踏板與制動壓力就會重新耦合,此時只能完全通過人力制動,這只滿足駕駛輔助系統的功能需求,而對于高級自動駕駛車輛,要求線控制動系統即使在發生單點故障時仍能處于解耦狀態并且可以實現主動制動功能。
關于壓力控制算法研究,國內外先進零部件廠商出于商業原因很少公開發表相關成果,公開文獻基本來自于高校及研究機構,主要分為兩種類型:第1類偏于理論,首先定性分析系統的壓力控制原理,并利用各種智能控制算法控制其執行部件,例如SOA算法、參數辨識方法、魯棒控制等,這類方法理論上控制更精確,但在實際工程中常常存在系統收斂性及復雜工況適應性差等問題;第2類偏于被控執行部件本身,根據其硬件特性,確定關鍵影響參數,并通過試驗標定其與控制目標的數據表格,并將數表用于壓力控制,這類方法工程應用更廣泛,但當系統結構及特性復雜時,標定工程量會隨之增大,因此對執行部件的選取較為關鍵。
本文根據高級自動駕駛汽車的功能需求,提出一種全解耦且具有冗余備份的液壓線控制動系統,包括兩種工作模式:常規制動和冗余制動,系統正常工作時,處于常規制動模式;當發生單點故障時,進入冗余制動模式。無論哪種工作模式,該系統都能將制動踏板和制動壓力解耦,并實現主動線控制動,對于占絕大部分工作區間的常規制動,采用了一種變等效活塞截面積控制方法,可以在保證壓力控制精度的同時降低液壓缸電機性能要求,并延長其使用壽命。同時為了實現系統壓力精確控制,針對兩種工作模式下不同硬件的結構特點,分別提出了基于輪缸p-V特性和電磁閥溢流特性的壓力控制算法。最后進行仿真分析與硬件在環試驗。
1 線控制動系統設計
1.1 線控制動系統結構設計
本文所提出液壓線控制動系統結構簡圖如圖1所示,由主制動單元(MBU)和冗余制動單元(RBU)組成。其中PSU為踏板模擬單元,PBU為動力制動單元,MHCU為主液壓控制單元,PSS為踏板行程模擬器,MC為制動主缸,SCV為模擬器截止閥,PBCV為電動液壓缸截止閥,PBC為電動液壓缸,MSV為模式切換閥,PBIV為電動液壓缸隔離閥,MCIV為主缸隔離閥,HCV為管路聯通閥,HSV為高壓切換閥;PRV為壓力調節閥,FLIV、FLOV分別為左前輪進、出液閥,RRIV、RROV分別為右后輪進、出液閥,FRIV、FROV分別為右前輪進、出液閥,RLIV、RLOV分別為左后輪進、出液閥。
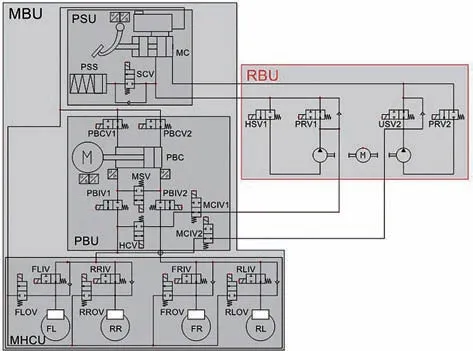
圖1 液壓線控制動系統結構圖
MBU包括PSU、PBU和MHCU 3個模塊,其中:PSU包括制動踏板、制動主缸、制動液儲液杯、PSS和2個踏板位移傳感器;PBU包括PBC以及若干開關電磁閥,其中PBC前后兩腔均裝有壓力傳感器,PBC無刷驅動電機裝有轉子位置傳感器;MHCU包括每個制動器的進出液閥。PSS由活塞和彈性元件組成,工作時其內部壓力隨輸入液體的體積而變化,以模擬踏板感覺。PSS由SCV控制,SCV為常閉閥,以確保系統不通電時PSS保持關閉,主缸的輸出接口直接與RBU相連。
MBU中高壓制動液由PBC產生,其結構如圖2所示。PBC由無刷電機通過傳動機構驅動,電機旋轉運動被轉換為活塞直線往復運動,活塞上裝有兩個方向的皮碗,可以實現活塞往復雙向建壓。PBC配有6個電磁閥,分別是MSV、HCV、PBCV1和PBCV2、PBIV1和PBIV2,MSV用于切換PBC的壓力調節模式,使液壓缸可以在不同運動方向上增減壓;由于PBC不是雙腔結構,需要用HCV使PBC同時控制兩組管路的壓力;PBCV用于連接PBC和儲液杯,可以為PBC補充制動液,或在活塞移動時從PBC排出制動液;PBIV用于確保系統不通電時,制動液不會流向PBC。
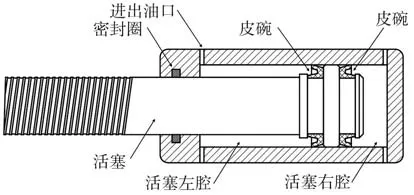
圖2 電動液壓缸PBC結構(不含電機和傳動機構)
RBU是一個簡化的ESC液壓控制單元,它省去了進氣閥、出氣閥和低壓蓄能器,只保留了液壓泵、HSV和PRV。HSV是開關電磁閥,用于控制液壓泵的開啟和關閉;PRV是線性電磁閥,用于調節液壓泵輸出壓力,通過控制電磁閥和液壓泵,可以保證MBU發生故障時,RBU仍能進行主動制動并實現精確壓力控制。
1.2 線控制動系統工作模式分析
上述線控制動系統包括兩種工作模式:常規制動和冗余制動。常規制動時MBU工作,首先控制HCV打開,將兩套獨立的液壓制動管路連接在一起,使PBC可以同步調節4個制動器壓力。常規制動包括高壓、中壓和低壓3種壓力調節模式,通過控制電磁閥MSV、PBCV1和PBCV2、PBIV1和PBIV2,系統可以在不同壓力調節模式之間切換,圖3~圖5是不同壓力調節模式下四輪同步增壓時PBU工作狀態,圖中箭頭反向即為減壓狀態。在不同壓力調節模式下,PBC等效活塞截面積不同,因此制動液排量和壓力調節率也不同,這種設計能降低對PBC電機性能要求,提高中壓和高壓下的壓力調節精度。
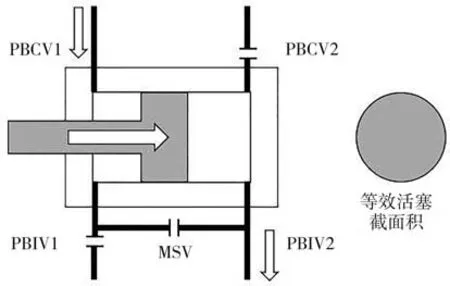
圖3 低壓模式下四輪同步增壓時PBU工作狀態
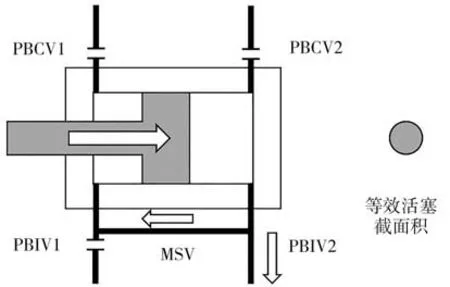
圖5 高壓模式下四輪同步增壓時PBU工作狀態
由圖可見,隨著壓力調節模式的變化,實際承受液壓的等效活塞截面積也隨之變化,公式如下:
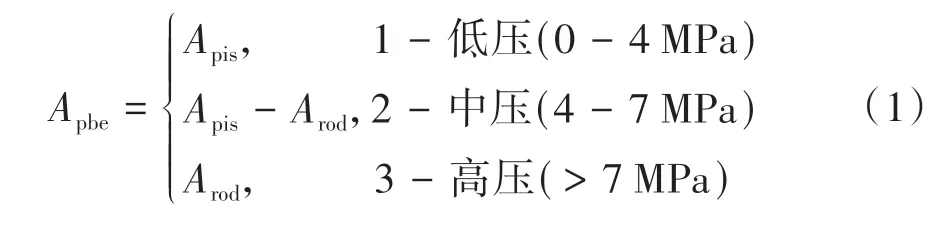

圖4 中壓模式下四輪同步增壓時PBU工作狀態
式中:A為等效活塞截面積,mm;A為活塞截面積,mm;A為活塞桿截面積,mm。
MBU出現單點故障時,冗余制動單元RBU將取代MBU進行制動壓力控制。在冗余制動模式下,MCIV1和MCIV2打開,HCV、PBIV1和PBIV2關閉,壓力控制由液壓泵、HSV、PRV完成。
系統增壓時RBU工作狀態如圖6所示,此時打開HSV關閉PRV,液壓泵將制動液泵入輪缸,通過調整PRV1和PRV2的驅動電流從而調節壓力。當系統減壓時,打開PRV關閉HSV,制動液流回制動主缸以實現減壓。
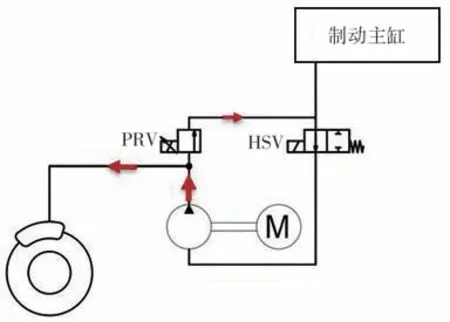
圖6 主動增壓時RBU工作狀態
2 壓力控制算法研究
精確液壓制動力控制是線控制動系統的一項關鍵技術,壓力控制效果的優劣直接影響系統最終控制品質。本文針對系統常規制動和冗余制動兩種工作模式,分別提出基于輪缸p-V特性和基于電磁閥溢流特性的壓力控制算法。兩種壓力控制算法均屬于第二類控制算法,根據執行部件物理特性確定關鍵控制參數,并通過試驗標定其與控制目標的關系數表,最終加以控制。
2.1 常規制動壓力控制算法
PBU是本文線控制動系統的主要壓力源。MBU未發生故障時,全部高壓制動液均由PBU產生,并通過電磁閥和液壓管線送至制動器。
因此控制PBU向制動器注入一定體積油液,便可在制動器中產生目標壓力,所需制動液體積可根據輪缸p-V特性曲線插值得到。當目標壓力為p時,所有制動器所需注入制動液體積為

然而無法直接對PBC活塞的位移進行控制,因此需要通過控制電機轉矩間接控制。

將式(13)代入式(14),可得到減壓狀態下活塞桿電機推力為

2.2 冗余制動壓力控制算法
高度自動駕駛汽車要求出現單點故障時仍能實現主動線控制動,這意味著制動系統應該有第2個獨立制動部件。
本文所述第2個制動部件是冗余制動單元RBU。根據前文描述,RBU有2個線性常開電磁閥PRV,線圈通電后,電磁閥的動鐵和定鐵會因磁化而產生電磁力,電磁力推動動鐵和閥芯,克服液壓力和彈簧力,使電磁閥關閉。PRV閥芯運動方程可表示為
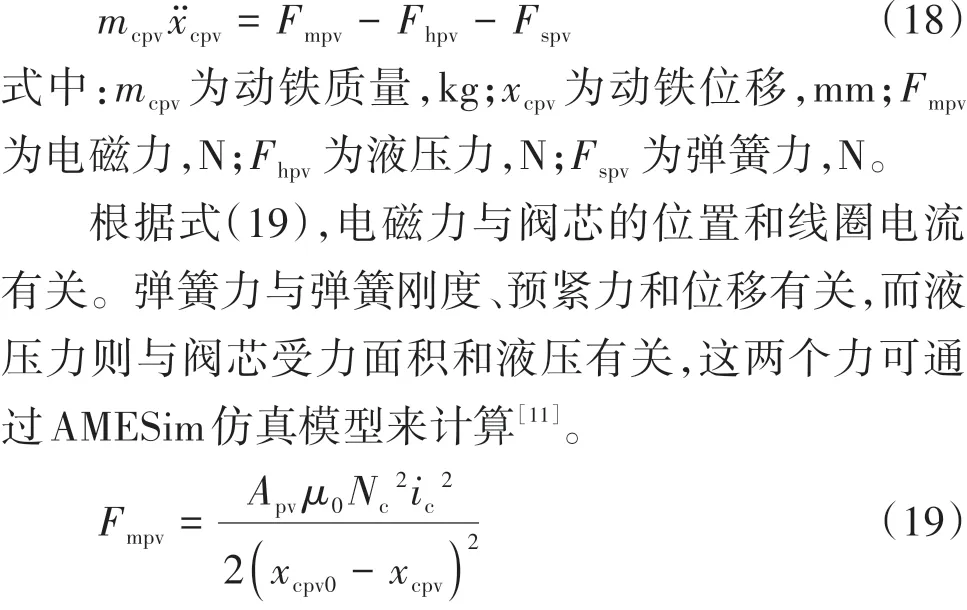
式中:A為工作氣隙的面積,m;μ為真空滲透率,N/A;N為線圈匝數;i為線圈電流,A;x為閥芯初始工作氣隙,mm。
如圖7所示,本文在AMESim中建立PRV電磁閥仿真模型,電磁閥的電磁力和線圈電感通過查表得到,線圈模型由RL串聯電路表示,電源為直流電,由PWM信號控制。
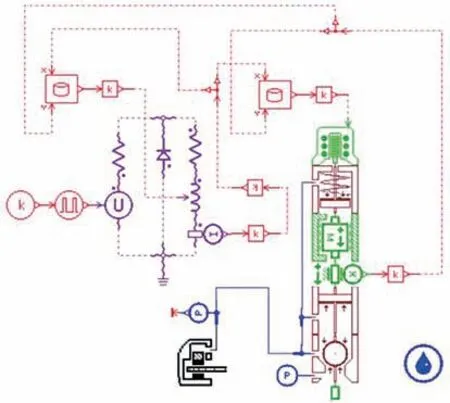
圖7 PRV電磁閥AMESim模型
在仿真模型中,使用不同占空比的PWM信號來驅動電磁閥,得到圖8壓力響應曲線。可見在一定驅動信號占空比范圍內,電磁閥表現出良好的比例溢流特性,即通過調節驅動信號占空比,可以得到目標穩態溢流壓力。通過試驗臺架所得壓力響應曲線如圖9所示,與仿真模型表現特性相似。
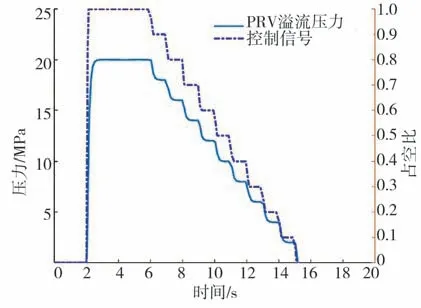
圖8 電磁閥溢流特性仿真曲線
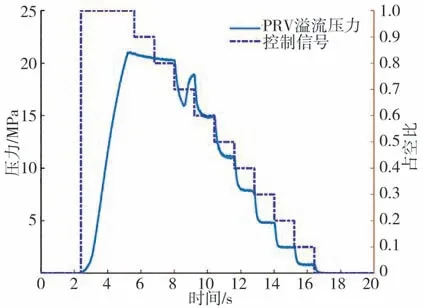
圖9 電磁閥溢流特性試驗曲線
根據圖6,PRV電磁閥溢流壓力與主缸壓力的差值即為輪缸液壓力,因此可以通過控制PWM信號占空比得到目標輪缸液壓力,公式表示為

式中:K為PRV溢流壓力p與PWM信號占空比D的比例系數,mL/MPa;p為輪缸液壓力,MPa;p為主缸壓力,MPa。
3 仿真分析
為驗證上述變等效活塞截面積控制方法及壓力控制算法有效性,搭建離線仿真平臺進行測試,為了便于向硬件在環仿真平臺移植,車輛動力學、液壓制動系統和電動動力總成等模型均在Simulink中建立,未使用其他仿真工具進行聯合仿真。仿真中所用主要參數見表1。
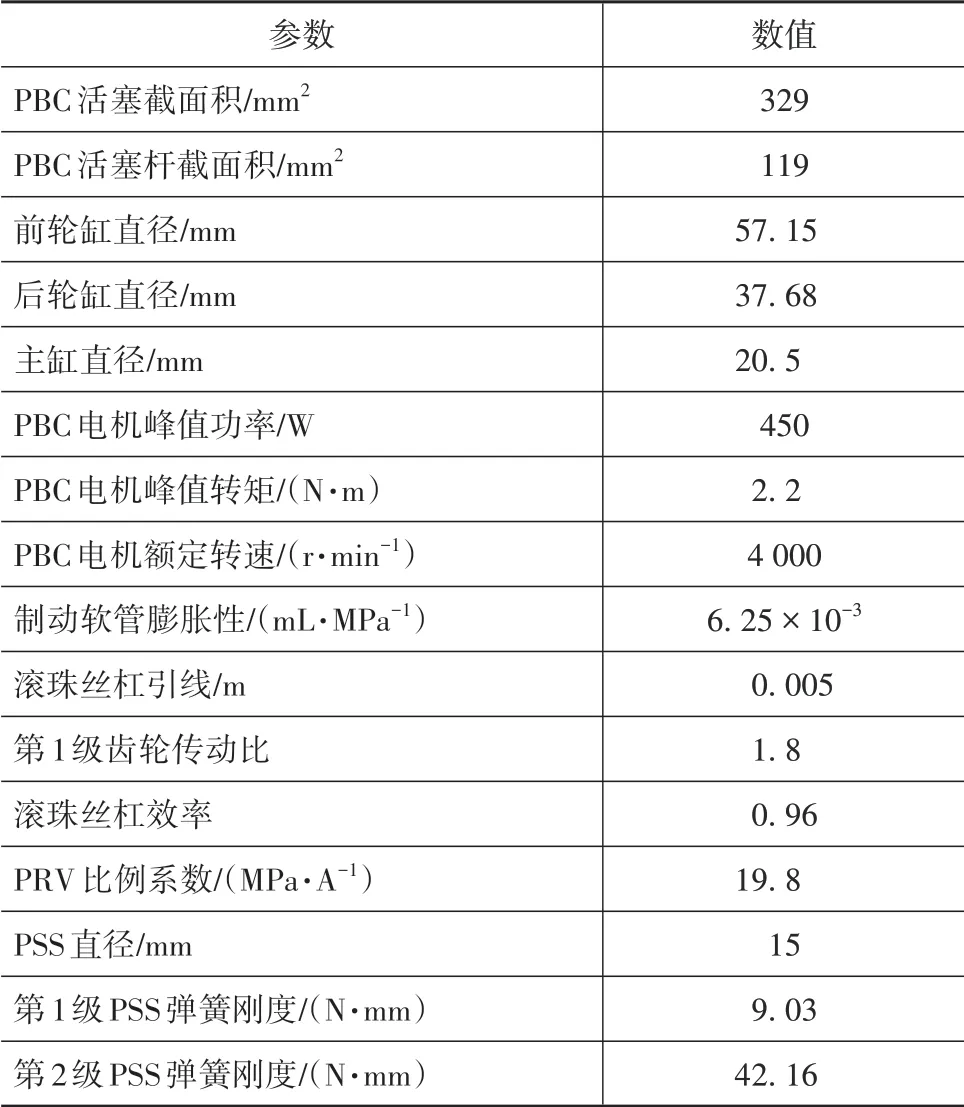
表1 主要參數
3.1 常規制動壓力控制仿真分析
為驗證在變等效活塞截面積控制方法下PBC的壓力調節性能,首先進行PBC增壓試驗。試驗過程中,PBC活塞以固定速度移動,控制器通過調節電磁閥來切換壓力調節模式,模式切換后,活塞運動方向改變,但速度保持不變。仿真結果如圖10~圖13所示。
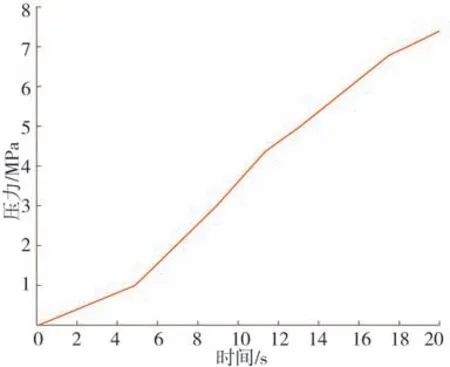
圖10 PBC的壓力曲線
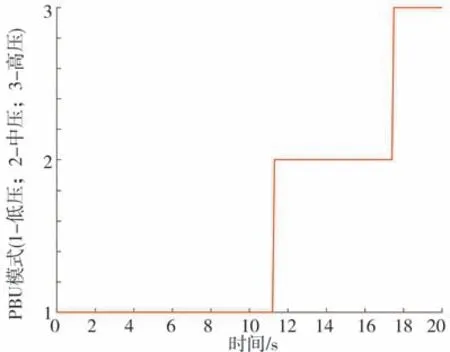
圖11 PBC壓力調節模式曲線
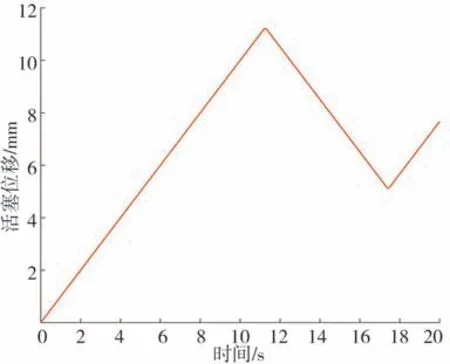
圖12 PBC活塞位移曲線
由圖10~圖13可見,隨著壓力逐漸增加,壓力調節模式從低壓切換到中、高壓,雖然壓力調節模式發生了變化,但制動壓力并未發生突變,而是平穩增長。同時根據壓力變化趨勢,從低壓切換到中、高壓時,增壓率逐漸下降,這是由于中壓和高壓模式下的等效活塞截面積比低壓時小,而活塞以固定速度移動,因此PBC排出油液體積較小,導致增壓率降低。
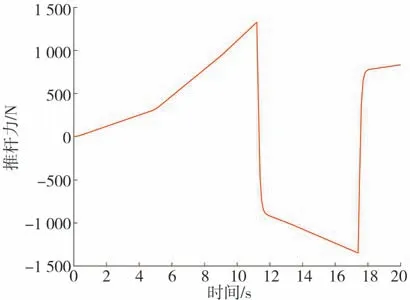
圖13 PBC推桿力曲線
此外,盡管壓力變化較大,但推桿力絕對值變化很小,與中壓模式相比,高壓模式下的推桿力甚至有所下降。這是因為高壓模式下,活塞的等效截面積較小,使得在相同推桿力下,活塞可以產生更高的壓力。因此,這種可變活塞橫截面積控制方法可以減少PBC電機輸出轉矩范圍,并降低其性能要求,延長其使用壽命。
為了滿足制動壓力的響應需求,結合工程經驗,通常要求系統在0~10 MPa壓力范圍內的增壓時間不大于150 ms,超調量不大于5%。為了驗證常規制動時壓力控制算法的控制精度,進行了隨機壓力跟隨測試,同時與工程中最常用的PID算法進行對比試驗。仿真結果如圖14和圖15所示,可以看出與PID算法相比,本文算法可以更快速準確的跟隨目標壓力,尤其在壓力發生突變時,其響應時間在100 ms以內,超調量小于3%,完全滿足系統壓力響應需求。
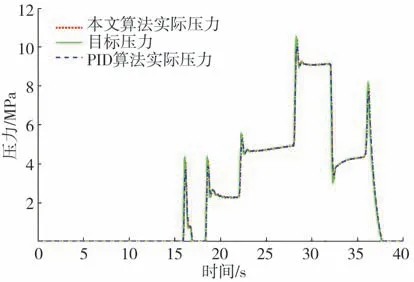
圖14 常規制動壓力控制效果
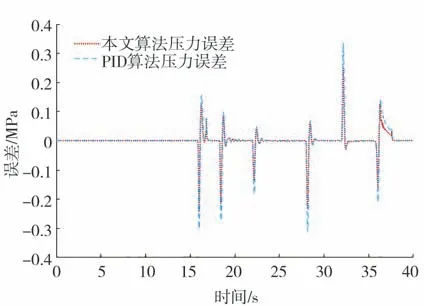
圖15 常規制動壓力控制誤差
3.2 冗余制動壓力控制仿真分析
冗余制動模式下,RBU通過調整壓力調節閥PRV線圈電流實現精確壓力控制。為了驗證RBU壓力控制算法的控制效果,同樣進行隨機壓力跟隨測試試驗并與PID算法進行對比。仿真結果如圖16和圖17所示,可以看出與PID算法相比,RBU壓力控制算法可以更快速準確地響應目標壓力,同樣在壓力發生突變時效果更明顯,其響應時間在120 ms以內,超調量小于4%,這意味著該線控制動系統在冗余制動模式下仍可以保持較高的制動性能。不過這種控制方法需要液壓泵頻繁工作,且噪聲較大,因此只應用于MBU發生單點故障時。

圖16 冗余制動壓力控制效果
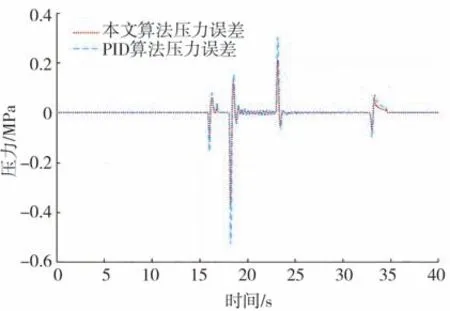
圖17 冗余制動壓力控制誤差
4 硬件在環試驗
4.1 試驗平臺搭建
本文優先搭建了常規制動MBU的硬件在環試驗臺,進一步驗證其可行性與有效性。總體構架如圖18所示。臺架包括制動控制系統與被控制動系統,其中被控制動系統包括基礎制動硬件、傳感器、電動液壓缸和液壓調節單元,由于硬件資源的限制,MBU由分立的硬件搭建,未進行集成。制動控制系統包括上位機、實時目標機、故障注入板和綜合信號調理箱。
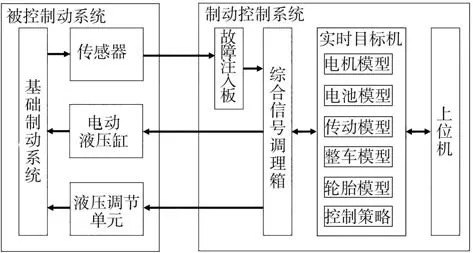
圖18 硬件在環試驗臺架總體構架
制動控制系統的構架如圖19所示,實時目標機為一臺x86構架計算機,其作為快速原型控制器,配備了高性能的CPU和I/O板卡,具備數字量、模擬量、高頻PWM信號輸入輸出和CAN總線通信功能,同時兼容Simulink Realtime實時仿真環境。除被控制動系統外的整車其他部分均以模型的形式運行在實時目標機中。

圖19 制動控制系統構架
實時目標機的I/O板卡不具備直接驅動負載的能力,需要綜合信號調理箱來完成負載的驅動。綜合信號調理箱的主要功能有傳感器供電、電磁閥驅動、電機驅動,還包括I/O接口過流保護、12 V直流電源管理等輔助功能。
被控制動系統硬件,通過制動器壓力信號與實時目標機內車輛動力學模型組成一輛半實物半模型的車輛。實時目標機通過壓力傳感器實時采集輪缸壓力,并將壓力信號反饋到車輛動力學模型中的制動轉矩計算模塊。該模塊根據壓力計算出制動轉矩并將其作用在車輪模型上,以建立實物制動系統與車輛動力學模型之間的聯系。
4.2 單次制動工況壓力控制試驗
在硬件在環臺架進行單次制動工況試驗,包括小強度制動和大強度制動。
首先進行單次小強度制動試驗,將車輛加速至100 km/h后進行制動,最大制動強度達到0.3g,仿真曲線如圖20~圖25所示。
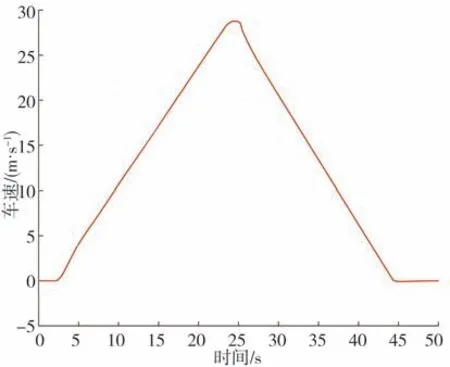
圖20 車速-時間曲線

圖21 加速度-時間曲線

圖22 PBU壓力跟隨曲線
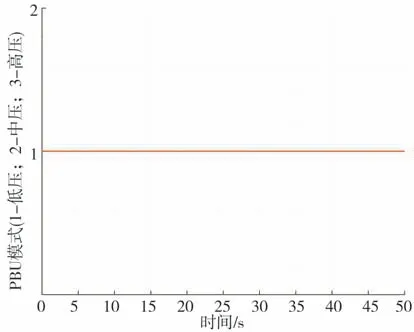
圖23 PBU壓力調節模式曲線
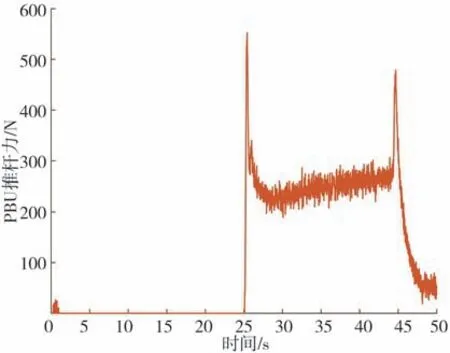
圖24 PBU推桿力曲線
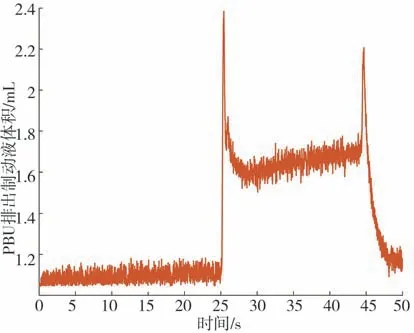
圖25 PBU排出制動液體積曲線
然后進行單次大強度制動試驗,將車輛加速至100 km/h后進行制動,最大制動強度達到0.8g,仿真曲線如圖26~圖31所示。
圖26 車速-時間曲線
圖31 PBU排出制動液體積曲線
圖27 加速度-時間曲線
分析上述兩組試驗曲線可知:所提壓力控制算法可以產生滿足駕駛員制動需求的制動壓力,并輸出足夠制動液來產生足夠制動壓力;PBU通過模式切換,改變等效活塞橫截面積,可以在高制動壓力下降低推桿力,降低對電機性能的需求;需要注意的是,在中壓模式下活塞運動會出現反轉,此時活塞推桿受力也會從推力變為拉力,這種交變力對設備壽命會產生不利影響,但從試驗曲線中可以看出中壓模式不易觸發,單獨依靠低壓和高壓模式基本可以滿足需求。

圖28 PBU壓力跟隨曲線
圖29 PBU壓力調節模式曲線
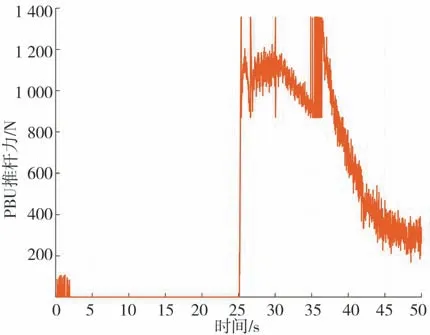
圖30 PBU推桿力曲線
因此上述試驗數據可以驗證所提MBU常規制動系統以及所設計變等效活塞控制方法的可行性,同時在一定程度上驗證其壓力控制算法的有效性,不過臺架試驗過程中存在一定壓力控制誤差,原因可能包括:模型失配、傳感器測量誤差和電磁干擾等,將在后續研究中進一步分析。
5 結論
綜上所述,本文所提出的線控制動系統在常規制動和冗余制動模式下均能實現主動線控制動功能,可以滿足高級自動駕駛汽車的功能需求;針對常規制動系統所設計的變等效橫截面積控制方法可以有效地減少電機輸出轉矩范圍,并降低其性能要求,延長使用壽命;針對兩種制動模式下不同硬件特點所提出的壓力控制算法,同樣可以滿足系統的壓力響應需求。
在后續研究中,將針對臺架試驗中壓力控制誤差產生原因進行分析及優化,同時繼續搭建冗余制動硬件臺架并將其與常規制動臺架聯合,對實際工程中常規制動失效時冗余制動如何介入及其介入效果進行深入研究,同時與市面上同類型產品及其控制算法進行對比,更進一步驗證所提出系統的實用性與優越性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32