面向實時交通仿真的智慧公路運行態勢評估與決策技術
2022-04-18 18:13:05吳嵐張明丁閃閃
交通科技與管理 2022年6期
關鍵詞:效率
吳嵐 張明 丁閃閃






(華設設計集團股份有限公司,江蘇 南京 210014)
摘要 實時在線微觀交通仿真技術發展對精細化交通管控產生了重要的推動作用。通過構建實時微觀交通仿真評價體系,開展路網交通運行態勢動態評估及預測;同時,基于動態交通分配的路徑規劃決策算法支撐路網科學誘導、智能決策。在智慧公路實際道路場景中進行BIM+GIS三維建模,其測試結果與該路段服務水平相近,面向實時交通仿真的公路運行態勢評估與決策技術助力公路出行服務效率提升、安全提升。
關鍵詞 實時在線微觀交通仿真;運行態勢評估;智能決策;效率
中圖分類號 U495 文獻標識碼 A 文章編號 2096-8949(2022)06-0014-03
引言
基于微觀實時交通仿真技術模擬物理世界高度逼真的交通運行環境,包括真實車輛行為、交叉口信號控制狀態等,利用路網態勢評估體系評價各類交通優化方案的實施效果,為交通管理部門提供有效決策依據,有利于實現交通運行管理精細化、科學化、高效化、智慧化的發展[1-2]。隨著城市擁堵問題的日漸嚴重,利用實時微觀交通仿真技術進行交通狀態推演和管控成為趨勢,國內在此方面進行了大量的探索。Giuffrè[3]等研究開發了一種基于單車道環形交叉路口的交通仿真模型,并進行真實案例分析證實其良好的匹配性;魏麗[4]等在微觀交通仿真中提出了基于期望車頭時距的跟馳模型,開發出模型程序,仿真結果更有效評價了交叉口信號控制策略。但方案研究僅限于單點或小范圍路段進行試驗,缺少針對大規模路網進行驗證。目前實時在線微觀交通仿真系統缺乏體系化評價,仿真對公路的實際管理效能不足,針對實時交通仿真的智慧公路評價指標體系、智能決策的數學模型仍有待進一步研究探索和應用。
該文圍繞實時在線微觀交通仿真應用場景,提出了一套完整的動態評估指標體系和智能決策方法,推進仿真技術在路網管理中的融合應用。
1 路網運行態勢評估體系
在建立交通仿真指標前,須對實時交通模型的合理性進行評價,保證模型誤差在規定范圍內;而后從交叉口、路段兩個層面分別進行評價,最后在路網宏觀層面評價延誤與沖突,以形成微觀宏觀一體的完整評價體系。
1.1 模型合理性評價
模型合理性評價采用仿真與實測對比的方法進行。具體地,標定一個路段,一方面,利用VISSIM旅行時間測量模塊獲取仿真運行過程中通過該路段的所有車輛的平均行程時間;另一方面在對應的仿真模擬時段使用測量車,對標定路段進行實際行駛時間測量,最后兩者進行對比,誤差不得超過10%。即:
式中:——仿真結果誤差值;
——在不同隨機種子下進行仿真得出平均仿真旅行時間,s;
——在對應仿真時段多次實測的平均行駛時間,s。
1.2 交叉口評價
交叉口評價,是根據仿真結果中交叉口整體延誤時間來判定其服務水平。在不同隨機種子下進行模型仿真,得到多組延誤數據,整合計算,進而得到最終的交叉口整體延誤時間;最后,通過延誤時間判斷交叉口的服務水平等級,輸出評價結果。
式中:——交叉口整體延誤時間,s;
——第i組仿真該交叉口延誤時間,s;
——第i組仿真該交叉口通過總流量,veh。
1.3 路段評價
通過評價路段服務水平,來快速有效地把控運行效率,出現問題,能及時發現,采取控制匝道、小區流量匯入的措施,保證主路運行通暢。按《HCM2010》劃分道路,保證每個路段只有一種類型,具體里程不作要求。根據對各路段仿真評價結果中的路段交通流量、平均速度進行分析,獲得路段交通密度,進而判斷路段交通服務水平。
式中:K——該路段交通流密度,veh/km;
Q——該路段仿真總流量,veh;
——該路段仿真通過車輛平均行駛速度,km/h。
1.4 路網延誤評價
對仿真區域內整體路網延誤進行評價,是為了最快地從宏觀層面了解整體路網交通運行情況,從整體角度出發,關注全局通行能力,這有利于管理部門更有效地調整交通資源,保證管轄區域內整體交通運行穩定。路網評價,主要依賴延誤指數,延誤指數越高,整體交通服務水平越差。
延誤指數,即道路交通實際通行時間與理想順暢狀態下通行時間的比值。一般暢通狀態下的通行時間,是仿真夜間車輛通行所獲得的。即:
式中:——延誤指數;
——當前時刻仿真路網內某路段車輛行程時間;
——暢通狀態下仿真路網內某路段車輛行程時間。
1.5 路網沖突評價
通過結合微觀交通仿真軟件與仿真沖突分析軟件SSAM(Surrogate Safety Assessment Model的簡稱),根據分析得到的仿真沖突代替歷史事故和現場交通沖突對交通設施進行安全評價,從而間接進行交通安全評價。
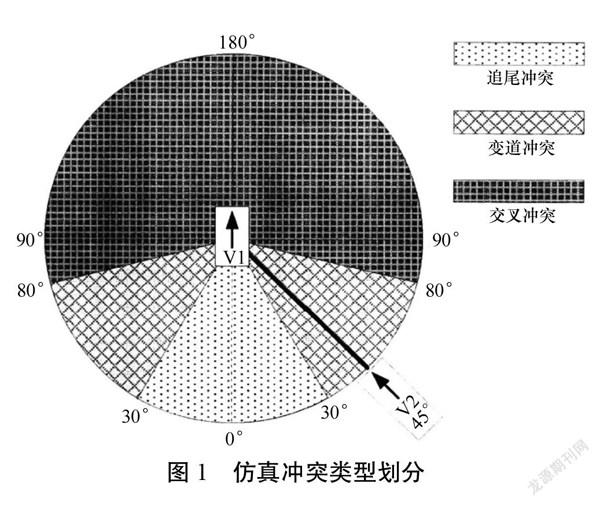
與現實情況下的交通沖突概念相類似,仿真沖突是指在仿真模型中兩輛車輛在相互沖突的軌跡上運行,由于其中一輛車或者兩輛車同時采取了避險行為而沒有發生仿真事故的事件。根據仿真沖突的形成過程特點,SSAM根據仿真車輛TTC(Time-to-collision的簡稱)判斷是否存在仿真沖突。TTC指轉向車輛離開沖突點到直行車輛保持原有車速和行駛方向到達沖突點的時間差。TTC閾值可在運行SSAM前根據實際需要進行修改,其默認值為1.5 s,而當TTC值大于1.5 s時,認為兩車之間沒有發生沖突(如圖1所示)。
2 智能化決策技術研究
2.1 決策支持基礎——動態交通分配模型
動態交通分配是智能化決策技術的關鍵,根據不同路網交通承載能力將交通需求分配到最優路徑上,實現不同路網交通優化目標。動態交通分配模型主要分為離線版和在線版,離線版動態交通分配通常用于優化與評估交通規劃和交通管理方案;在線版動態交通分配更偏重于路網實時信息的估計和預測。
2.2 A*最短路徑規劃算法
A*最短路徑規劃算法主要采用優先搜索算法來尋找單起始點單目的點的最短路徑。相比于Dijkstra 算法,具有更好的執行效率。該算法通過距離和權重組成的函數來決定搜索的優先順序。在搜索過程中,該算法優先選擇高權重的路徑,并重復搜索,直至最短路徑出現為止。
2.3 基于動態交通分配的路徑規劃決策
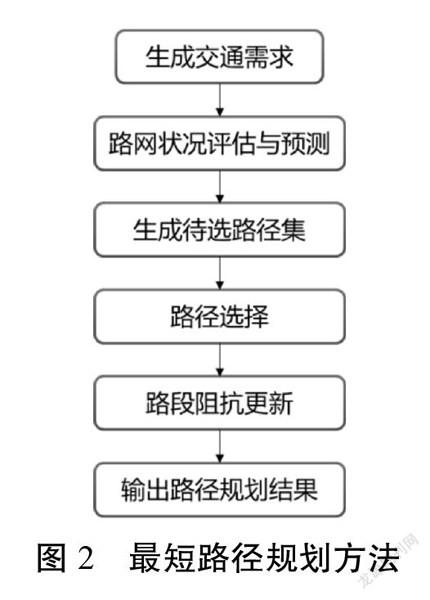
基于動態交通分配的路徑規劃決策在路徑規劃過程中引入動態交通信息,進行路網狀況與預測,使得該決策算法更具有動態性;利用微觀交通仿真軟件對車輛行駛行為進行模擬,得以反映動態交通分配模型中不同類型車輛之間在行駛過程中的相互影響,使得該決策算法更具有全面性。因此,算法具有更實時的數據支撐和模型推演,從而獲得更準確的路徑規劃結果(如圖2所示)。
3 研究成果示范應用
案例選取S342無錫段智慧公路科技示范工程為應用對象,該路段為已建大流量普通國省道,是江蘇省干線公路快速骨架網“四縱八橫”中的一部分,作為蘇南、蘇皖重要通道對支撐長三角一體化高質量發展起到重要作用。示范路段全線位于無錫,共計52.75 km,其中與312國道共線段13 km,共線段與全國最繁忙的滬寧高速公路平行。現構建該區域的BIM+GIS實時交通仿真路網模型,形成動態評價指標和決策方法,支撐路網應急管控。
3.1 三維場景跨平臺呈現
實現全線微觀交通仿真與三維BIM+GIS平臺匹配,利用WebSocket通信技術打通桌面仿真軟件與Web前端的鏈路,基于WebGL可視化技術實現了實時三維交通仿真Web端呈現(如圖3所示),將交通仿真軟件中的車輛推送至三維BIM+GIS平臺,跨平臺實現車輛流動,Web前端應用中加載WebGL高精度三維模型數據,建立車輛隊列管理器,依據獲取到的仿真程序輸出結果,實現車輛對象動態生成和移除,同時更新WebGL環境中車輛對象位置姿態,實現仿真計算結果的動態同步。
3.2 交通仿真評價指標
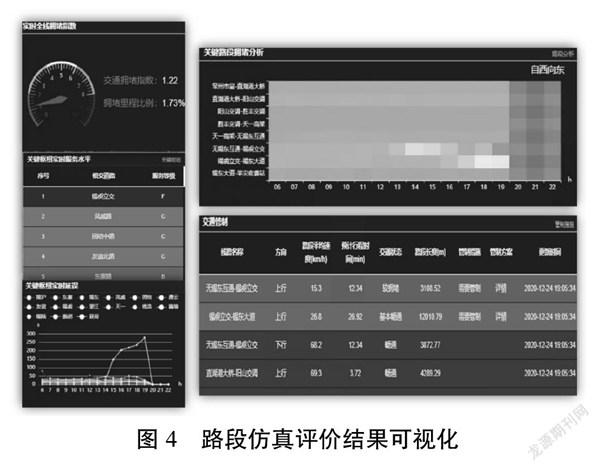
基于實時交通仿真評價體系,對交通運行狀態深度挖掘,由點及面,對節點、路段、路網等進行剖析,分析其時間、空間上的交通規律,形成實時評價指標(如圖4所示),包括延誤、排隊長度、通行時間等10余項,支撐大規模路網的實時交通管控。同時,結合仿真技術與預測算法,可對路網交通狀態進行15/30 min短時交通預測,預測指數涵蓋宏觀路網、微觀路段與交叉口,有助于分析路網未來態勢。
3.3 智能決策誘導方案生成
通過智能化的路徑決策算法支持,針對擁堵、事故、養護等路網事件,進行動態交通分配,通過科學的路徑誘導方案實時發布到平臺端,提示路網管理人員向路側情報板、第三方導航平臺等發布出行引導信息,平衡路網交通流量、提升通行效率。以望江立交-錫虞立交為例(如圖5所示),仿真系統對該路段態勢實時推演擁堵路段態勢,平臺智能生成決策誘導方案,引導駕駛員繞開主線。
4 結語
該文構建了實時微觀交通仿真評價體系,提出了支撐路網科學誘導、智能決策的路徑分配算法。并利用構建的路網及外場檢測器數據搭建系統平臺進行實際應用測試,實現了低延時、長里程的三維高精度交通仿真路網的實時監測、預測和動態預警,形成了完整的公路網定量評價指標體系,使交通管控具備精細的決策分析能力。未來基于該技術可構建更復雜的實時交通仿真路網,結合實際業務需求科學制定基于動態決策能力的科學交通管控和誘導方案,提高普通國省道智慧公路管理效能、提升公路出行服務水平。
參考文獻
[1]王松, 黃柯棣, 楊妹. 基于動態數據驅動的交通在線決策[J]. 計算機仿真, 2019(1):167-170.
[2]周勇, 羅佳晨, 陳振武, 等. 基于在線仿真的交通信號管控應用模式思考: 2019年中國城市交通規劃年會[C].中國四川成都, 2019.
[3]Giuffrè, O., Granà, A., Tumminello, M.L., Sferlazza, A.Calibrating a microscopic traffic simulation model for roundabouts using genetic algorithms[J]. Journal of Intelligent and Fuzzy Systems, 2018(2): 1791-1806.
[4]魏麗, 孫俊, 商蕾. 微觀交通仿真模型建模及應用[J]. 武漢理工大學學報, 2010(4): 793-796+800.
收稿日期:2022-02-17
作者簡介:吳嵐(1986—),女,碩士,高級工程師,研究方向:智能感知、交通仿真、交通控制和交通安全。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32