基于車載自組網的交通事故風險預防方法
2022-04-18 18:13:05刁含樓吳嵐華禹凱
交通科技與管理 2022年6期
刁含樓 吳嵐 華禹凱
摘要 車載自組網技術是當今交通運輸領域最前沿的技術之一,路段網聯車與路側單元通過無線組網可實現豐富信息的高效傳輸共享。該技術一方面可與動態車道控制結合,加強控制策略的穩定性與靈活性,另一方面掌握全局交通信息的組網網聯車本身即具有更優的駕駛特性,從而改善交通流的整體狀態。引入車載自組網技術,基于隨機森林算法構建解耦式交通—通信仿真框架,評價低比例網聯車的二次事故預防效果,結果顯示只需較低比例(5%~20%)的網聯車可改善事故對交通環境的影響。
關鍵詞 車載自組網;事故風險預防;解耦式交通—通信仿真;隨機森林
中圖分類號 V279 文獻標識碼 A 文章編號 2096-8949(2022)06-0020-03
引言
車載自組網(Vehicular Ad-hoc Network, VANET)是當前交通運輸領域最前沿的技術之一,通過車車(Vehicle-to-Vehicle, V2V)、車路(Vehicle-to-Infrastructure, V2I)通信可實現一定范圍內網聯車的信息共享和協同運動,被認為在交通安全[1]、出行效率[2]和環境可持續[3]等領域具有巨大的應用潛力。
網聯車在組網環境下,可獲取關于周圍交通環境的更準確的交通信息,表現出更穩定的行為,在網聯車、人工駕駛車混合的交通環境中,前者達到一定的占用率,依然有助于形成更穩定的交通流[4]。Yang 等[5]即研究了網聯車的存在對二次事故風險防控的效果,研究人員認為在事故發生后,組網環境下的網聯車可以提前預知事故信息,表現出更為謹慎保守的動力學特征,研究者修改了組網網聯車的動力學參數,經過仿真驗證,在僅依靠車車通信的情況下,網聯車比例相對較高(超過15%),顯著降低二次事故風險。
1 交通—通信建模
1.1 實時交通—V2I通信辨識
車載自組網中V2I通信指網聯車與路側RSU設備之間的通信。因為RSU設備靜止且一般通信范圍大于網聯車,V2I通信往往更穩定可靠。控制中心可借由 RSU設備對其覆蓋范圍內的網聯車發布指令。RSU與網聯車通信半徑一般不等,故V2I通信又有上行、下行之分,僅考慮單向V2I通信,指令單向地由 RSU傳向網聯車。
1.2 考慮瓶頸影響的實時交通—V2V通信預測模型
實時交通—V2V通信預測模型旨在基于實時宏微觀交通信息預測任意網聯車的車車連通狀態。對任意網聯車,若能接收至少3輛網聯車所發消息,認為該車處于連通狀態。除去異常值后在統計的274 706組樣本中有164 879組正樣本,指該網聯車于該時刻處于連通狀態,另有109 827組負樣本。與V2I通信不同,V2V通信過程中所有節點空間位置均可變,基于遍歷算法實時預測連通狀態存在較大的時間開銷,故基于二分類機器學習算法建立網聯車連通與宏微觀交通狀態的聯系,實現V2V通信預測。
1.3 候選自變量設置與事故影響辨識
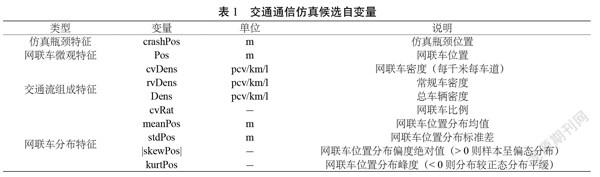
研究基于隨機森林模型預測網聯車的通信狀態。模型所設候選自變量如表 1所示,可分為仿真瓶頸特征、網聯車微觀特征、交通流組成特征和網聯車分布特征4類,共含10項變量。其中交通流組成特征是對車載自組網整體效果影響最大,也是約束最大的因素。網聯車分布特征進一步明確了對應時刻車載自組網節點的空間分布。
根據統計學定義,理論上網聯車的分布偏度 skewPos 與分布峰度 kurtPos 均可作為區分瓶頸影響的指標。為選取最優指標,對兩者的聯合分布進行可視化,同時區分兩類瓶頸仿真所對應的情況。可以明顯看到樣本點大體呈下凹分布——隨著位置偏度絕對值的增加位置峰度也隨之上升,與瓶頸影響下網聯車分布的畸變情況完全一致。可以看出受分析尺度影響不同事故位置會影響網聯車的分布偏度——當瓶頸于K1+950斷面時分布偏度偏向于負值;而瓶頸于 K1+300 斷面時分布偏度偏向于正值。這意味著必然存在一斷面,當事故恰好發生于此時即使網聯車分布發生畸變,其分布偏度仍接近于0,分布偏度不適用于事故影響劃分。綜上所述,選取網聯車分布峰度kurtPos為區分指標,設置峰度閾值,對網聯車分布是否受事故影響進行區分,當樣本峰度高于該閾值時,認為網聯車分布受事故影響明顯。考慮到均勻分布的峰度為?1.2,定性地以?0.6為閾值進行劃分,將樣本劃分為正常狀況(Normal)和瓶頸明顯影響(Fluctuate)兩類,分別包含76 661和198 045組樣本。
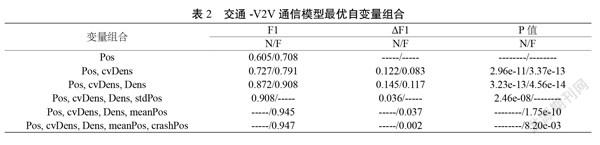
經顯著性檢驗得到的兩模型最優自變量組合存在一定差異(表 2)。兩模型的公共自變量為網聯車位置 Pos、網聯車密度 cvDens 和總密度 Dens,包含網聯車微觀特征和交通流組成特征兩類特征。除此之外正常狀況時模型尚須考慮網聯車位置標準差 stdPos,即模型更關注網聯車分布的離散情況。而受瓶頸明顯影響時因為網聯車聚集程度基本確定,故模型在各項分布特征中更關心網聯車的聚集位置,即分布均值 meanPos。另外模型還須瓶頸位置 crashPos 以輔助預測。
2 車載自組網環境下的事故風險分析
以 SUMO 自帶的跟馳、換道模型模擬常規車和網聯車的微觀駕駛行為,當網聯車處于連通狀態時對部分微觀交通模型參數進行調整,當網聯車連接斷開時則退回常規車交通模型參數。
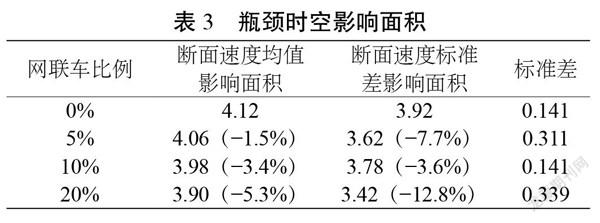
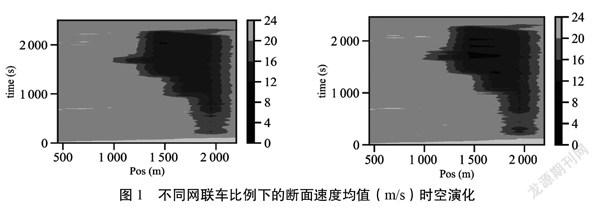
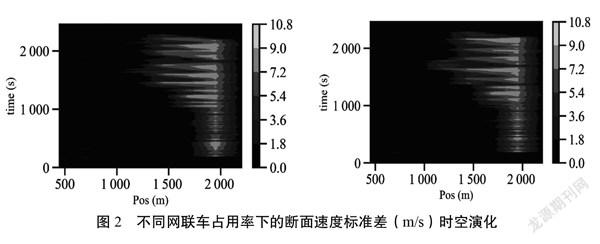
以路段各斷面速度均值和標準差的時空演化表示瓶頸的時空影響(圖 1、圖 2)。同樣地由大律法對時空演化數據進行分割,定量計算事故時空影響面積(表 3)。圖 2為不同網聯車占用率下事故的發生對斷面速度均值的時空影響,其中深色的慢速行駛區域即為事故的影響范圍。可以看到在無網聯車時,事故的空間影響一度達到事故斷面上游 700 m處,網聯車的引入對該影響范圍的改善效果似乎并不十分明顯。表 3由定量計算的影響面積證實了網聯車的效果——約5%的網聯車比例可使事故瓶頸面積縮小約 1.5%,且該效果隨網聯車比例增加而進一步增強,說明網聯車的存在有助于在一定程度上改善瓶頸對斷面速度的影響。圖 1為不同網聯車占用率下事故的發生對斷面速度標準差的時空影響,亮色區域表示該斷面各車道速度差異較大,同樣可表征瓶頸的影響范圍。圖 1與圖 2具有較高的一致性,再結合表 3可看出網聯車的引入同樣有助于改善瓶頸發生后斷面各車道的速度變異性,改善效果存在波動但整體幅度明顯優于其對速度均值的改善效果,5% 的網聯車可使影響面積縮小約 7.7%。斷面橫向速度差越低有助于減小換道頻率,既提升了安全性也緩解了換道造成的通行能力衰減。綜上所述,混合交通環境中的網聯車可從各方面不同程度地改善交通狀態。
3 結論
根據現有的耦合式交通—通信仿真框架進行車載自組網仿真獲取仿真數據,再進行數據挖掘,分別討論交通—V2I 通信、交通—V2V 通信兩類情況。預測 V2V 通信時,因不同交通狀態特別是事故的不同影響下網聯車的分布將發生改變,從而影響信息傳播,引入表征網聯車分布的各項變量并區分事故影響,構建考慮事故影響的實時交通—V2V 通信預測模型,并對模型的預測性能和各項指標的影響進行定量定性分析。最后基于模型構建解耦式交通—通信仿真框架,基于解耦式仿真分析網聯車的存在對二次事故預防與通行能力提升的效果,結果顯示只需較低比例(5%~20%)的網聯車自各方面改善事故對交通環境的影響。
參考文獻
[1]BAI F, KRISHNAN H. Reliability analysis of DSRC wireless communication for vehicle safety applications; proceedings of the 2006 IEEE intelligent transportation systems conference, F, 2006 [C]. IEEE.
[2]BAUZA R, GOZALVEZ J, SANCHEZ-SORIANO J, et al. Road Traffic Congestion Detection through Cooperative Vehicle-to-Vehicle Communications; proceedings of the 35th Annual IEEE Conference on Local Computer Network (LCN), Denver, CO, F 2010 Oct 10-14, 2010 [C]. 2010.
[3]TIELERT T, KILLAT M, HARTENSTEIN H, et al. The impact of traffic-light-to-vehicle communication on fuel consumption and emissions; proceedings of the 2010 Internet of Things (IOT), F, 2010 [C]. IEEE.
[4]CHEN A, KHORASHADI B, CHUAH C-N, et al. Smoothing vehicular traffic flow using vehicular-based ad hoc networking & computing grid (VGrid); proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, F, 2006 [C]. IEEE.
[5]YANG H, WANG Z, XIE K. Impact of connected vehicles on mitigating secondary crash risk [J]. International journal of transportation science and technology, 2017(3): 196-207.
收稿日期:2022-02-18
作者簡介:刁含樓(1989—),男,碩士研究生,研究方向:智能交通、智慧公路。