一種新型柔性氣缸驅(qū)動(dòng)手爪
2022-04-19 02:09:10宋展宏李小寧
機(jī)械制造與自動(dòng)化 2022年2期
宋展宏,李小寧
(南京理工大學(xué) 機(jī)械工程學(xué)院,江蘇 南京 210094)
0 引言
工業(yè)自動(dòng)化生產(chǎn)線上常用各種手爪作為物品的抓取、搬運(yùn)裝置。這些手爪一般采用電機(jī)、液壓缸、氣缸的驅(qū)動(dòng)方式并通過(guò)不同的機(jī)械機(jī)構(gòu)實(shí)現(xiàn)抓取動(dòng)作,屬于高剛性的驅(qū)動(dòng),抓取力比較大,但沒(méi)有柔順性,不適合易碎易損物品的抓取[1]。新興的軟體手爪采用氣動(dòng)、液壓、繩索等方式進(jìn)行驅(qū)動(dòng),由硅橡膠、凝膠等高彈性材料制成,具有連續(xù)變形的特性,在抓取易碎易損品上具有得天獨(dú)厚的優(yōu)勢(shì),但普遍存在低剛度、抓取力小的問(wèn)題[2]。
WU Z P等[3]提出一種關(guān)節(jié)式內(nèi)骨骼氣動(dòng)軟體手爪,采用若干剛性內(nèi)骨骼單元作為驅(qū)動(dòng)器內(nèi)部承力結(jié)構(gòu),外層驅(qū)動(dòng)部分由硅膠構(gòu)成,使手爪具有一定的柔順性,抓取力約為35N;ZHOU J S等[4]提出一種4自由度手爪,具有多種柔順靈巧抓取模式,為限制驅(qū)動(dòng)器過(guò)量變形嵌入了纖維加強(qiáng)筋,但降低了驅(qū)動(dòng)器的輸出效率; WANG L等[5]提出一種單自由度波紋管軟硬混合手爪,在對(duì)物品的抓取上具有柔順性但抓取力較小。因此,如何使手爪既具有適度柔順性,又具有較大的抓取力是當(dāng)前研究中亟待解決的一個(gè)問(wèn)題。
1 新型手爪的整體結(jié)構(gòu)
本文提出一種新型手爪,為滿足手爪在70kPa的工作壓力下抓取力≥50N,抓取范圍≥150mm,并且在抓取過(guò)程中具有柔順性的技術(shù)需求,設(shè)計(jì)出如圖1所示的手爪整體結(jié)構(gòu)。手爪呈對(duì)稱分布,包括柔性驅(qū)動(dòng)部分和手爪抓取部分。手爪抓取部分為機(jī)械結(jié)構(gòu),可通過(guò)杠桿及連桿機(jī)構(gòu)對(duì)柔性驅(qū)動(dòng)部分的輸出力進(jìn)行放大。柔性驅(qū)動(dòng)部分主要由兩對(duì)結(jié)構(gòu)相同尺寸不同的柔性波紋管6和波紋管11構(gòu)成;手爪抓取部分包括指尖部分2和指根部分3,指根和指尖部分均由6個(gè)子部分固連構(gòu)成。具體工作過(guò)程為:壓縮氣體從三通管管接頭14上端進(jìn)入到指根驅(qū)動(dòng)器11內(nèi)部,指根驅(qū)動(dòng)器外有剛性滑管12,滑管部分與指根部分3相連,當(dāng)指根驅(qū)動(dòng)器11伸長(zhǎng)后,推動(dòng)指根部分3繞著指根關(guān)節(jié)4轉(zhuǎn)動(dòng),形成指根部分的夾取;指尖部分采用同樣的滑管結(jié)構(gòu),當(dāng)向指尖驅(qū)動(dòng)器6通入壓縮氣體后,指尖驅(qū)動(dòng)器會(huì)沿軸向伸長(zhǎng),推動(dòng)指尖部分2繞指根部分3轉(zhuǎn)動(dòng),實(shí)現(xiàn)指尖部分對(duì)物品的夾取。釋放物品時(shí),斷開(kāi)壓縮氣體輸入,采用真空技術(shù)輔助整體結(jié)構(gòu)復(fù)位。
2 柔性驅(qū)動(dòng)氣缸的研究及測(cè)試
2.1 柔性驅(qū)動(dòng)氣缸的結(jié)構(gòu)設(shè)計(jì)
根據(jù)手爪的總體結(jié)構(gòu)方案和技術(shù)需求,通過(guò)簡(jiǎn)單的受力分析可得出如表1所示的兩部分柔性驅(qū)動(dòng)氣缸設(shè)計(jì)要求。

表1 兩部分柔性驅(qū)動(dòng)氣缸的設(shè)計(jì)要求
圖2為設(shè)計(jì)的柔性驅(qū)動(dòng)氣缸結(jié)構(gòu),其工作原理為:柔性波紋管4兩端與左側(cè)連接件1和右側(cè)連接件7連接,卡箍2將柔性波紋管4固定在左、右兩側(cè)連接件上;滑管分為內(nèi)、外兩部分,兩滑管采用間隙配合,同時(shí)波紋管的外徑與內(nèi)滑管5的內(nèi)徑相同,滑管可限制波紋管的過(guò)度膨脹變形;外滑管3和內(nèi)滑管5末端設(shè)有凸臺(tái),可保證柔性波紋管的移動(dòng)距離;四周均布定位螺栓8將外滑管3和內(nèi)滑管5固定在兩側(cè)連接件上。通入壓縮氣體后,柔性波紋管4一端密封,在滑管的限制下,柔性波紋管4沿著滑管的軸向變形伸長(zhǎng)。如果將右側(cè)連接件固定,在壓力的作用下,柔性波紋管4即可推動(dòng)左側(cè)連接件1伸長(zhǎng)并產(chǎn)生輸出力。

1—左側(cè)連接件;2—卡箍;3—外滑管;4—柔性波紋管;5—內(nèi)滑管;6—?dú)鈩?dòng)快換接頭;7—右側(cè)連接件;8—定位螺栓。圖2 柔性驅(qū)動(dòng)氣缸結(jié)構(gòu)圖
2.2 柔性驅(qū)動(dòng)氣缸的靜態(tài)性能分析
1)伸長(zhǎng)量分析
柔性波紋管的材質(zhì)為硅橡膠,硬度為shoreA10,圖3所示為柔性驅(qū)動(dòng)器單元的變形示意圖。
基于Yeoh模型以及材料的應(yīng)變勢(shì)能函數(shù)可得:
(1)
式中:W為應(yīng)變函數(shù);I1為變形張量的主不變量;λi為軸向、周向和徑向伸長(zhǎng)比;L0為單個(gè)氣腔初始長(zhǎng)度;R0為氣腔外壁初始半徑;r0為氣腔內(nèi)壁初始半徑。滑管假設(shè)為剛體,則驅(qū)動(dòng)器外壁半徑在整個(gè)過(guò)程中有R=R0。根據(jù)橡膠材料的不可壓縮性可將變形過(guò)程中單元?dú)馇坏陌霃絩和柔性驅(qū)動(dòng)器伸長(zhǎng)量L關(guān)系表示為
(2)

圖3 柔性驅(qū)動(dòng)器單元變形示意圖
柔性驅(qū)動(dòng)器產(chǎn)生軸向位移過(guò)程視為準(zhǔn)靜態(tài)過(guò)程,根據(jù)虛功原理,靜態(tài)平衡系統(tǒng)的所有外力經(jīng)過(guò)虛位移所做過(guò)的虛功之和為0。對(duì)于驅(qū)動(dòng)器即氣壓做功應(yīng)與增加的應(yīng)變能相平衡,對(duì)應(yīng)的表達(dá)式如下:
(3)
式中:Va為氣腔體積;Vb為硅橡膠體積。
(4)
假設(shè)單元?dú)馇还枘z的截面積在變化過(guò)程中保持不變,則可以得到下式:
(5)
令:
(6)
η1、η2、η3分別為軸向、周向和徑向應(yīng)變算子,聯(lián)立式(1)-式(6)可建立波紋管腔室氣壓pi與軟體伸長(zhǎng)量L的關(guān)系:
[C10+2C20(I1-3)+3C30(I1-3)2]
(7)
其中:
(8)
式(7)中:N為波數(shù);C10、C20、C30為Yeoh模型材料常數(shù),可通過(guò)試驗(yàn)測(cè)得。由式(8)可以看出波紋管初始參數(shù)值確定后,Q和K即為常數(shù)。當(dāng)波紋管的伸長(zhǎng)量L為已知量時(shí)即可求出所需的氣壓值pi。
2)輸出力分析
如圖4所示,當(dāng)壓縮氣體通入柔性氣缸后,壓縮氣體作用在柔性波紋管內(nèi)部使波紋管伸長(zhǎng)變形,此過(guò)程中波紋管產(chǎn)生的軸向阻力為Fs,當(dāng)柔性波紋管膨脹至整個(gè)滑管內(nèi)部后,壓縮氣體產(chǎn)生的推力為Fp,兩滑管之間的摩擦力為Ff。
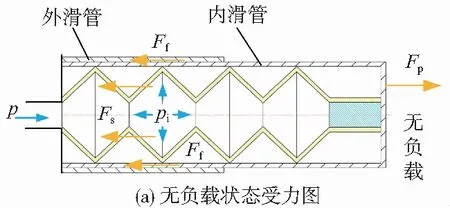
圖4 柔性驅(qū)動(dòng)氣缸的輸出力分析圖
整個(gè)過(guò)程中柔性驅(qū)動(dòng)氣缸產(chǎn)生的輸出力F可表示為
(9)
其中f(L)為柔性驅(qū)動(dòng)器伸長(zhǎng)量與壓力的函數(shù),具體參見(jiàn)式(7)。由于滑管間采用間隙配合,并且滑管材料帶有一定的自潤(rùn)滑性能,因此可以不考慮滑管之間的摩擦力Ff影響。當(dāng)柔性驅(qū)動(dòng)氣缸達(dá)到設(shè)定伸長(zhǎng)量后,其輸出力與柔性氣缸的有效面積有關(guān),則可將式(9)寫(xiě)為
(10)
由式(10)可以看出,當(dāng)輸入柔性驅(qū)動(dòng)氣缸輸入氣壓p小于設(shè)定位移所需的氣壓值pi時(shí),柔性氣缸的輸出力為0;而當(dāng)輸入氣壓p大于所需氣壓值pi時(shí),柔性驅(qū)動(dòng)氣缸的輸出力F即為氣缸理論輸出力與伸長(zhǎng)時(shí)所需力的差值。
2.3 柔性驅(qū)動(dòng)氣缸的輸出力測(cè)試
圖5為柔性驅(qū)動(dòng)氣缸輸出力測(cè)試原理圖,對(duì)指根和指尖部分柔性驅(qū)動(dòng)氣缸不同伸長(zhǎng)量下的輸出力進(jìn)行測(cè)試,測(cè)試的供氣壓力范圍為0~70kPa,每隔5kPa記錄一組數(shù)據(jù)。

1—數(shù)顯壓力表;2—減壓閥;3—過(guò)濾器;4—?dú)庠矗?—待測(cè)柔性驅(qū)動(dòng)氣缸;6—測(cè)力計(jì);7—光柵尺。圖5 柔性驅(qū)動(dòng)氣缸輸出力測(cè)試原理圖
圖6給出了指根和指尖部分柔性驅(qū)動(dòng)氣缸在不同輸入氣壓不同伸長(zhǎng)量下的輸出力圖。從圖中可以看出,指根和指尖部分柔性驅(qū)動(dòng)氣缸的輸出力與壓力呈線性關(guān)系,在70kPa的工作壓力下,指根和指尖部分柔性驅(qū)動(dòng)氣缸的最大輸出力分別為50N和22N,均滿足設(shè)計(jì)要求。

圖6 指根和指尖部分柔性驅(qū)動(dòng)氣缸輸出力曲線圖
3 手爪的抓取力與實(shí)物抓取測(cè)試
抓取力是手爪非常重要的性能參數(shù),大的抓取力與抓取柔順性是柔性氣缸驅(qū)動(dòng)手爪的最大特點(diǎn)。本節(jié)針對(duì)手爪的抓取能力與實(shí)物抓取進(jìn)行試驗(yàn)研究。
3.1 手爪的最大抓取能力測(cè)試
最大抓取能力是指在不同壓力下手爪所能抓取的最大質(zhì)量。將手爪樣機(jī)固定后測(cè)量得手爪的抓取范圍為0~160mm,搭建如圖7所示的手爪抓取能力測(cè)試系統(tǒng)。

1—?dú)庠矗?—開(kāi)關(guān)閥;3—分離器;4、6、13、14—減壓閥;5—干燥器;7—手動(dòng)換向閥;8、9—單向節(jié)流閥;10—球形殼體;11—拉壓力傳感器;12—?dú)飧祝?5—手爪樣機(jī);16—變送器;17—采集卡;18—計(jì)算機(jī)。圖7 手爪抓取能力測(cè)試系統(tǒng)
根據(jù)手爪的抓取范圍選擇直徑120mm的球形殼體作為基準(zhǔn)被抓物,當(dāng)殼體質(zhì)心恰好與指根關(guān)節(jié)平齊時(shí),開(kāi)始測(cè)試。具體測(cè)試過(guò)程為:將球形殼體10與拉壓力傳感器11相連并安裝在氣缸12上,調(diào)節(jié)減壓閥13和14使手爪樣機(jī)15對(duì)球形殼體10形成抓取,氣缸12對(duì)球形殼體10施加向下的拉力,直至球形殼體10掙脫手爪樣機(jī)15的抓取。記錄不同壓力下球形殼體脫離抓取時(shí)拉壓力傳感器所產(chǎn)生的最大電壓值,變換后可得圖8所示手爪的抓取能力曲線圖。
從圖8可以看出手爪在工作壓力為70kPa時(shí)的最大抓取力為12.2kg,即122N。手爪的抓取能力與供氣壓力近似呈線性關(guān)系,對(duì)曲線作線性擬合,可以得到手爪的抓取能力GLc(單位:kg)與輸入氣壓pin(單位:kPa)的函數(shù)關(guān)系式為
GLc=0.191 29pin-1.036 28
(11)

圖8 柔性氣缸驅(qū)動(dòng)手爪的抓取能力曲線圖
3.2 手爪的實(shí)物抓取試驗(yàn)
對(duì)手爪的實(shí)物抓取能力進(jìn)行試驗(yàn),根據(jù)手爪的抓取范圍,選取生活中常見(jiàn)的不同形狀的物品以及易碎易損品為抓取對(duì)象,實(shí)際抓取效果如圖9所示。

(a)棒球;(b)燈泡;(c)柚子;(d)洗手液;(e)茶葉罐;(f)水杯;(g)4L礦泉水;(h)光碟;(i)禮物盒;(j)遙控器;(k)西紅柿;(l)方便面餅;(m)蘋(píng)果;(n)玻璃盆栽。圖9 手爪實(shí)物抓取試驗(yàn)結(jié)果
試驗(yàn)結(jié)果表明,柔性氣缸驅(qū)動(dòng)手爪抓取動(dòng)作柔順安全,對(duì)易碎易損品和不同形狀的物品具有較好的抓取效果。
4 結(jié)語(yǔ)
本文提出了一種新型柔性氣缸驅(qū)動(dòng)手爪,重點(diǎn)介紹了手爪和柔性驅(qū)動(dòng)氣缸的結(jié)構(gòu)設(shè)計(jì),同時(shí)針對(duì)柔性驅(qū)動(dòng)氣缸的特點(diǎn)進(jìn)行靜態(tài)理論分析與輸出力測(cè)試,對(duì)手爪的抓取能力和實(shí)物抓取進(jìn)行測(cè)試。試驗(yàn)結(jié)果表明:在70kPa的工作壓力下,指根和指尖部分柔性驅(qū)動(dòng)氣缸的最大輸出力為50N和22N;手爪的最大抓取力為122N,可以抓取質(zhì)量為12.2kg的物品,比一般柔性手爪的35N抓取力提高了約2.4倍,并且對(duì)易碎易損品和不同形狀的物品可進(jìn)行柔順安全抓取。
