航天員失重環(huán)境下運(yùn)動(dòng)策略與效能分析
2022-04-20 09:46:52李志昌黃倬然李劍飛曹哲魏承
中國(guó)空間科學(xué)技術(shù) 2022年2期
關(guān)鍵詞:模型
李志昌,黃倬然,李劍飛,曹哲,魏承,*
1. 北京大學(xué)人民醫(yī)院骨關(guān)節(jié)科,北京 100044
2. 哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001
3. 北京空間飛行器總體設(shè)計(jì)部, 北京 100094
4. 中國(guó)航天科工集團(tuán)有限公司,北京 100048
1 引言
中國(guó)空間站天和核心艙發(fā)射升空,準(zhǔn)確進(jìn)入預(yù)定軌道,任務(wù)取得成功標(biāo)志著中國(guó)空間站工程在軌建造大幕正式開啟。中國(guó)空間站在后續(xù)進(jìn)行在軌組裝建造、空間實(shí)驗(yàn)平臺(tái)搭建與研究、空間站維護(hù)維修和應(yīng)急安全任務(wù)時(shí)都會(huì)涉及大量載人航天活動(dòng)。空間站為航天員提供更大活動(dòng)空間,因此也對(duì)航天員空間活動(dòng)提出了更多需求。與地面環(huán)境不同,由于空間為微重力環(huán)境,航天員空間活動(dòng)與地面活動(dòng)動(dòng)力學(xué)特性存在差別。在制定載人航天任務(wù)以及進(jìn)行航天員訓(xùn)練時(shí)必須要考慮力學(xué)環(huán)境特點(diǎn),需要以航天員為對(duì)象進(jìn)行動(dòng)力學(xué)實(shí)驗(yàn)研究[1-3]。
航天員的動(dòng)力學(xué)特性研究是一種在特殊環(huán)境下對(duì)人體力學(xué)行為的研究。人體的研究由于受到實(shí)驗(yàn)條件、成本、倫理等限制經(jīng)常需要依靠計(jì)算仿真。在人體動(dòng)力學(xué)仿真計(jì)算方面,近年來(lái)主要圍繞基于骨骼關(guān)節(jié)建立的人體多剛體模型,基于骨骼-肌肉結(jié)構(gòu)建立的人體生物力學(xué)模型以及基于神經(jīng)-肌肉-骨骼建立的力學(xué)-控制綜合模型三個(gè)方面進(jìn)行了大量研究。如秦菲菲等基于UK(Udwadia-Kalaba)理論建立人體下肢剛體模型[4],對(duì)下肢運(yùn)動(dòng)過(guò)程關(guān)節(jié)力矩進(jìn)行分析;Lee S H等考慮軟組織應(yīng)變而耦合有限元單元建立人體上半身骨骼-肌肉綜合生物力學(xué)模型,并設(shè)計(jì)控制器計(jì)算出必要的肌肉激活信號(hào)[5];Dzeladini F等考慮人體神經(jīng)反射效應(yīng)建立基于反射的神經(jīng)肌肉模型,評(píng)價(jià)其在人體行走過(guò)程中的調(diào)節(jié)作用[6];Joo H. Kim等基于優(yōu)化算法對(duì)人體運(yùn)動(dòng)動(dòng)力學(xué)進(jìn)行預(yù)測(cè)和分析,說(shuō)明了不同的外部負(fù)載和任務(wù)導(dǎo)致了不同的人體運(yùn)動(dòng)和執(zhí)行器扭矩分布[7]。總體而言,近年來(lái)對(duì)人體動(dòng)力學(xué)的理論研究愈發(fā)完善,相關(guān)生物力學(xué)理論以及控制思想也大量應(yīng)用于機(jī)械仿人機(jī)器人領(lǐng)域[8-9]。
國(guó)內(nèi)人體動(dòng)力學(xué)在航天中的應(yīng)用,主要體現(xiàn)在航天服外骨骼開發(fā)、航天員地面模擬方法以及針對(duì)航天員局部簡(jiǎn)單活動(dòng)的仿真[10],譬如李照陽(yáng)等設(shè)計(jì)了航天服關(guān)節(jié)助力外骨骼結(jié)構(gòu)并優(yōu)化[11];李昊等以搬運(yùn)載荷為例,針對(duì)航天員艙外作業(yè)過(guò)程進(jìn)行了動(dòng)力學(xué)仿真等,對(duì)航天員失重狀態(tài)下全身協(xié)調(diào)運(yùn)動(dòng)以及自身姿態(tài)調(diào)整方面研究較為有限[12]。
近年來(lái)隨計(jì)算技術(shù)的發(fā)展,許多計(jì)算工具被開發(fā)用于模擬仿真人體自然運(yùn)動(dòng),如LifeMod、SIMM、AnyBody等商業(yè)軟件以及開源軟件OpenSim。這些商業(yè)軟件目前廣泛應(yīng)用于跟蹤描述人體運(yùn)動(dòng)行為、計(jì)算人體動(dòng)力學(xué)特點(diǎn)、分析正常和病態(tài)生理現(xiàn)象[13-15]。然而,由于商業(yè)軟件可能存在的使用限制以及OpenSim在與環(huán)境交互時(shí)對(duì)實(shí)驗(yàn)的依賴,本文基于多體系統(tǒng)動(dòng)力學(xué)軟件(MBDyn)[16]建立微重力環(huán)境航天員多體系統(tǒng)動(dòng)力學(xué)模型,分析空間環(huán)境下航天員運(yùn)動(dòng)的動(dòng)力學(xué)特征與姿態(tài)調(diào)整策略,拓展MBDyn在人體動(dòng)力學(xué)仿真方面應(yīng)用。
2 航天員微重力環(huán)境虛擬人體模型
人體運(yùn)動(dòng)由多個(gè)骨骼、關(guān)節(jié)、肌肉、軟組織同時(shí)共同作用而成,因此為實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng)的跟蹤、定量描述,就需要對(duì)人體系統(tǒng)進(jìn)行分析簡(jiǎn)化并抽象出可計(jì)算的多體系統(tǒng)動(dòng)力學(xué)模型。
2.1 人體系統(tǒng)空間姿態(tài)及運(yùn)動(dòng)學(xué)描述
為統(tǒng)一運(yùn)動(dòng)描述,首先對(duì)空間慣性坐標(biāo)方向進(jìn)行規(guī)定。根據(jù)人體的運(yùn)動(dòng)規(guī)律,一般將人體在三維空間內(nèi)劃分矢狀面(XOY)、額狀面(YOZ)和水平面(ZOX)三個(gè)相互垂直的基準(zhǔn)面,從而對(duì)應(yīng)將基準(zhǔn)面交線矢狀軸(X)、垂直軸(Y)和額狀軸(Z)作為基準(zhǔn)軸。
本文的研究對(duì)象為整個(gè)航天員人體系統(tǒng),根據(jù)航天員身著航天服時(shí)的空間運(yùn)動(dòng)狀態(tài),忽略手指、腳趾等小關(guān)節(jié)對(duì)系統(tǒng)運(yùn)動(dòng)影響,考慮上肢的肩、肘、腕關(guān)節(jié)以及下肢的髖、膝、踝關(guān)節(jié)對(duì)人體自由度進(jìn)行分配。人體肩、髖關(guān)節(jié)可進(jìn)行屈曲/伸展、外展/內(nèi)收、內(nèi)/外旋活動(dòng),可抽象為球鉸鏈接,具有三自由度;肘關(guān)節(jié)、膝關(guān)節(jié)主要進(jìn)行屈曲/伸展活動(dòng),可抽象為轉(zhuǎn)動(dòng)副,具有單自由度;踝關(guān)節(jié)主要可實(shí)現(xiàn)屈伸同時(shí)也可實(shí)現(xiàn)內(nèi)旋外展,因此分配二自由度。綜上,規(guī)劃出人體上肢單臂七自由度、下肢單腿六自由度模型,結(jié)合本文主要涉及航天員肢體簡(jiǎn)單運(yùn)動(dòng),忽略肩關(guān)節(jié)內(nèi)外旋活動(dòng),進(jìn)一步簡(jiǎn)化肩關(guān)節(jié)為二自由度。最終建立人體四肢二十四自由度模型如圖1,其中關(guān)節(jié)內(nèi)數(shù)字為自由度數(shù)目,人體可視化模型來(lái)源于OpenSim人體骨骼幾何模型,相關(guān)動(dòng)力學(xué)參數(shù)配置見表1。

圖1 人體運(yùn)動(dòng)學(xué)描述Fig.1 Description of human kinematic

表1 人體骨骼模型動(dòng)力學(xué)參數(shù)
2.2 人體動(dòng)力學(xué)建模
定義軀干為漂浮基座,在骨骼質(zhì)心、關(guān)節(jié)、末端設(shè)立坐標(biāo)系,建立樹狀結(jié)構(gòu)計(jì)算模型。通過(guò)沿X、Y、Z軸平移及繞軸轉(zhuǎn)動(dòng)的6個(gè)參數(shù)對(duì)模型進(jìn)行運(yùn)動(dòng)學(xué)描述,并計(jì)算相應(yīng)坐標(biāo)變化矩陣。多個(gè)自由度的實(shí)際關(guān)節(jié)由多個(gè)長(zhǎng)度、質(zhì)量均為0繞其坐標(biāo)系Z軸運(yùn)動(dòng)(轉(zhuǎn)動(dòng)/平移)的單自由度計(jì)算關(guān)節(jié)表示。


式中:γj、βj、αj分別為繞各主軸姿態(tài)變換角度;qj為關(guān)節(jié)i的旋轉(zhuǎn)角度。當(dāng)基座的速度v0與角速度ω0給定后,可以通過(guò)遞歸算法得到速度和角速度,求導(dǎo)后可得相應(yīng)關(guān)i的速度vi及角速度ωi:
式中:cij為質(zhì)心i到關(guān)節(jié)j位移;vBi,ωBi分別為骨骼i連接的上一骨骼的速度及角速度。整理后可得末端速度xe的雅克比矩陣,其中Jm為關(guān)于關(guān)節(jié)角q的雅可比矩陣,Jb為關(guān)于軀干位姿xb的雅可比矩陣:
單個(gè)剛體的受力情況由Newton-Euler方程得出,F(xiàn)i為力矢量,Ni為力矩,mi、Ii分別為骨骼i的質(zhì)量和轉(zhuǎn)動(dòng)慣量:
定義Bi為骨骼i連接的上一個(gè)骨骼的編號(hào),則骨骼間連接關(guān)系可表示為:
從末端向基座逆向迭代后可得各關(guān)節(jié)廣義力:
式中:fj和ni為作用在關(guān)節(jié)i上的力和力矩;fe和ne為作用在末端關(guān)節(jié)上的力和力矩。最終模型的動(dòng)力學(xué)方程可以表述為:
式中:Fe為末端外力/力矩;cb,cm為速度相關(guān)非線性項(xiàng);Fb/τ為基座上外力/力矩;其余各項(xiàng)表示為:

式中:r0i≡ri-r0∈R3;ri為骨骼i質(zhì)心位置;HMq表達(dá)式為:
式中:JRi≡[k1,k2,…,ki,0,…,0]∈R3×n;ki為關(guān)節(jié)i軸線方向向量;JTi表達(dá)式為:
JTM表達(dá)式為:
2.3 基于逆動(dòng)力學(xué)控制器設(shè)計(jì)
基于公式(1)可移項(xiàng)得到關(guān)節(jié)力矩:


系統(tǒng)誤差在計(jì)算模型與實(shí)際模型完全一致的情況下,各關(guān)節(jié)誤差解耦可表示為:
綜合以上動(dòng)力學(xué)與控制理論建立航天員動(dòng)力學(xué)與控制系統(tǒng)如圖2,其中基于逆動(dòng)力學(xué)計(jì)算出的關(guān)節(jié)力矩項(xiàng)輸入MBDyn,在MBDyn中進(jìn)行動(dòng)力學(xué)求解得到關(guān)節(jié)實(shí)時(shí)運(yùn)動(dòng)數(shù)據(jù),再由運(yùn)動(dòng)數(shù)據(jù)計(jì)算反饋?lái)?xiàng)完成系統(tǒng)的閉環(huán)控制。
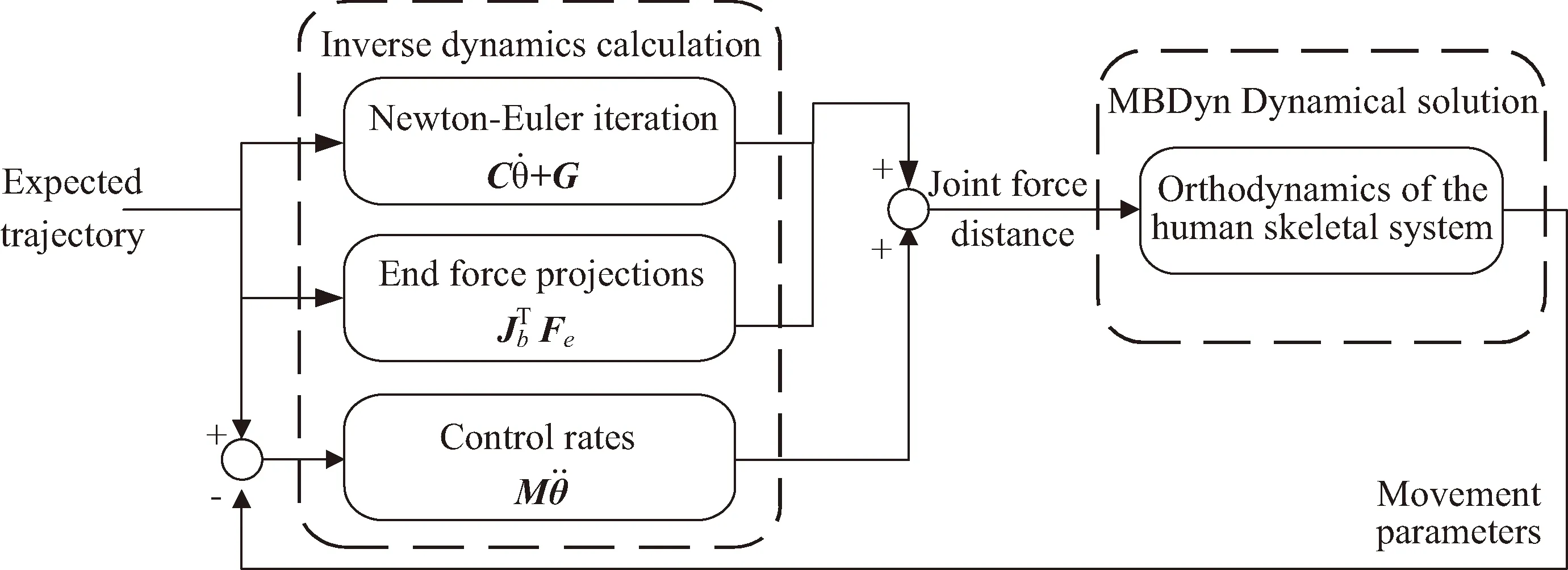
圖2 系統(tǒng)動(dòng)力學(xué)-控制流程圖Fig.2 Dynamics - control flow diagram
2.4 動(dòng)力學(xué)-控制系統(tǒng)驗(yàn)證
相較于逆動(dòng)力學(xué)計(jì)算,閉環(huán)控制系統(tǒng)可通過(guò)負(fù)反饋修正誤差,抗干擾能力強(qiáng),控制精度較高[17-18]。首先利用人體蹲起這一簡(jiǎn)單全身運(yùn)動(dòng)過(guò)程,對(duì)2.2節(jié)中閉環(huán)系統(tǒng)的控制精度進(jìn)行驗(yàn)證:
通過(guò)對(duì)蹲起過(guò)程仿真計(jì)算,人體上下肢期望運(yùn)動(dòng),與實(shí)際控制跟隨效果的對(duì)比曲線分別為圖3、圖4。由曲線重合程度可以看出,上述控制系統(tǒng)對(duì)期望運(yùn)動(dòng)全過(guò)程的跟隨效果較好,系統(tǒng)的精度較高。
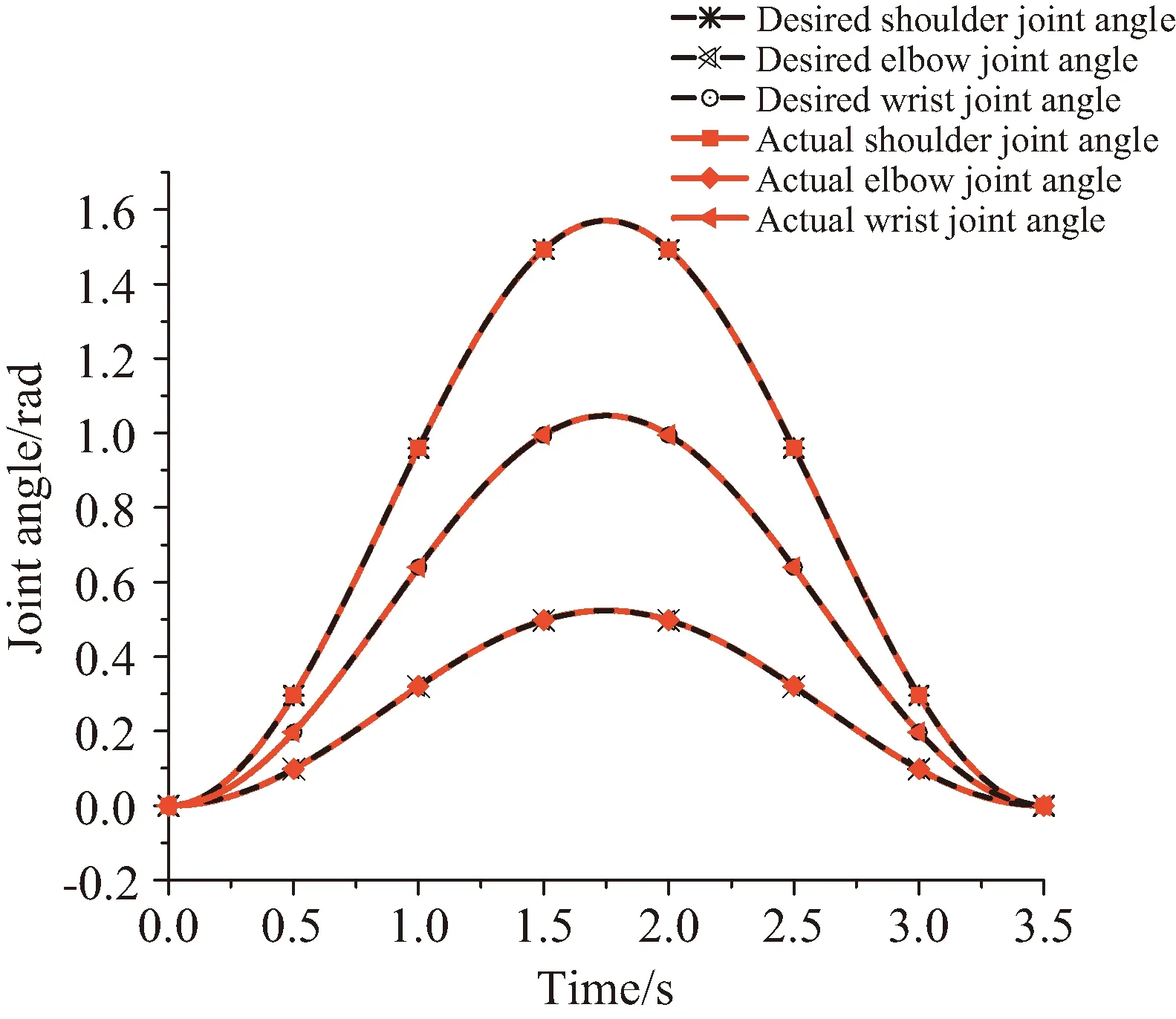
圖3 上肢關(guān)節(jié)角度曲線Fig.3 Upper limb joints angle curve

圖4 下肢關(guān)節(jié)角度曲線Fig.4 Lower limb joints angle curve
3 航天員姿態(tài)調(diào)整策略分析
3.1 單個(gè)肢體簡(jiǎn)單調(diào)節(jié)
航天員在空間運(yùn)動(dòng)中由于微重力環(huán)境,在不接觸航天器時(shí)身體會(huì)處于漂浮狀態(tài),因此身體運(yùn)動(dòng)規(guī)律與地面條件有所區(qū)別,需要依靠自身動(dòng)作來(lái)對(duì)姿態(tài)進(jìn)行調(diào)節(jié)。
根據(jù)質(zhì)心動(dòng)量矩定理,處于空間自由狀態(tài)的人體可以通過(guò)肢體的擺動(dòng)來(lái)實(shí)現(xiàn)對(duì)姿態(tài)的調(diào)整或保持運(yùn)動(dòng)穩(wěn)定,因此本文首先對(duì)人體上肢活動(dòng)對(duì)軀干姿態(tài)的影響進(jìn)行定量分析。
設(shè)計(jì)人體右臂首先繞肩關(guān)節(jié)由自然下垂擺動(dòng)至身體側(cè)方平舉,之后右臂保持與軀干90°繞垂直軸方向旋至身體前方,上述過(guò)程如圖5,具體關(guān)節(jié)角度變化如圖6所示。
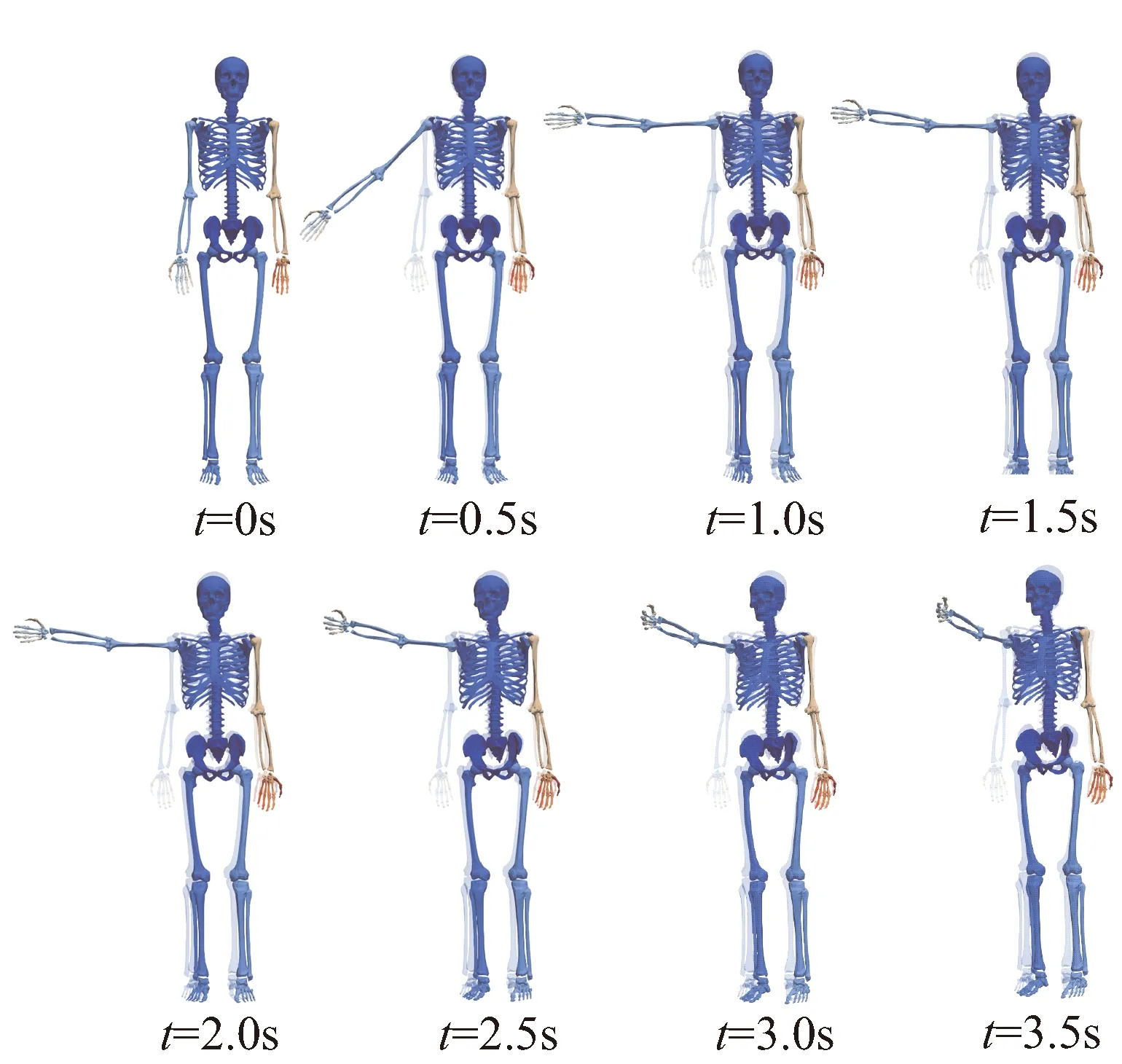
圖5 肢體簡(jiǎn)單調(diào)節(jié)示意Fig.5 Simple limb adjustment diagram
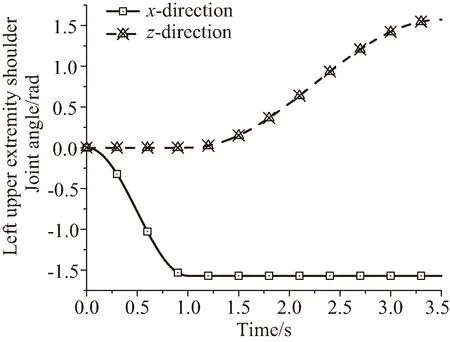
圖6 關(guān)節(jié)角度曲線1Fig.6 Joint angle curve 1
經(jīng)過(guò)仿真計(jì)算得到運(yùn)動(dòng)過(guò)程中人體軀干姿態(tài)變化如圖7,對(duì)比肢體運(yùn)動(dòng)與姿態(tài)變化曲線可以看出,右上臂分別通過(guò)沿x軸外展和沿z軸內(nèi)旋可以實(shí)現(xiàn)對(duì)軀干延矢狀軸和額狀軸滾轉(zhuǎn)和偏航的調(diào)節(jié)。同時(shí)由于人體自身結(jié)構(gòu)所致延矢狀軸方向轉(zhuǎn)動(dòng)慣量相比Y軸方向明顯較大,因此手臂調(diào)節(jié)軀干進(jìn)行繞Y軸的偏航作用較為明顯,且手臂側(cè)擺動(dòng)作也會(huì)引起其他方向姿態(tài)偏移。
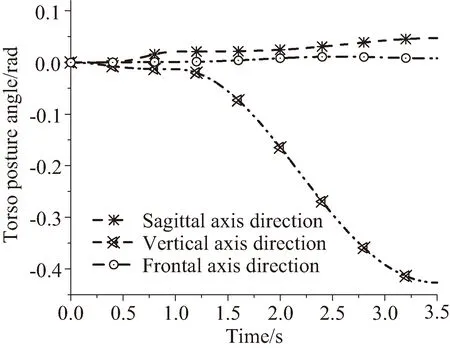
圖7 軀干姿態(tài)角度變化曲線1Fig.7 Torso posture angle change curve 1
3.2 全身肢體協(xié)調(diào)姿態(tài)調(diào)整
(1)肢體協(xié)調(diào)軀干繞額狀軸方向運(yùn)動(dòng)
通過(guò)上述分析說(shuō)明了肢體對(duì)航天員姿態(tài)的可調(diào)節(jié)性,但同時(shí)從結(jié)果也可看出肢體對(duì)除垂直軸外的其他方向姿態(tài)調(diào)整能力有限,因此需依靠四肢協(xié)調(diào)運(yùn)動(dòng)而實(shí)現(xiàn)航天員姿態(tài)較大幅度改變。
參考相關(guān)文獻(xiàn)[19]設(shè)計(jì)運(yùn)動(dòng)過(guò)程如圖8所示,首先雙臂側(cè)平舉過(guò)頭頂同時(shí)小腿向后方擺動(dòng),之后大腿內(nèi)收蜷至胸前后小腿向外伸展,隨后雙臂沿側(cè)方擺回身體兩側(cè),最后雙腿展開伸直至動(dòng)作完成,具體關(guān)節(jié)角度變化如圖9所示。
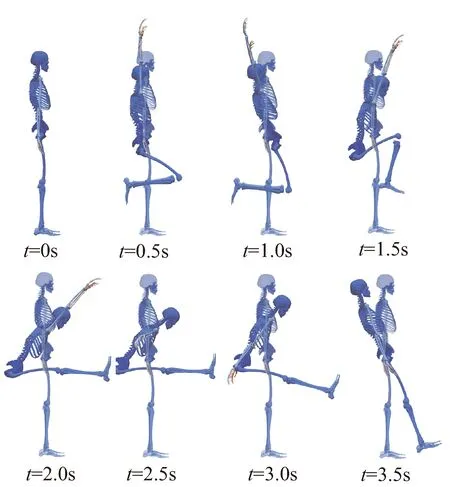
圖8 人體四肢協(xié)調(diào)運(yùn)動(dòng)示意1Fig.8 Diagram 1 of coordinated movement of human limbs
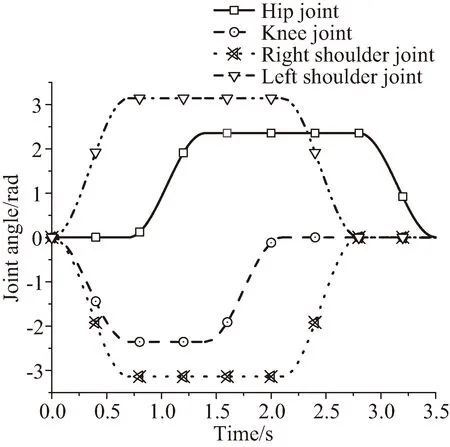
圖9 關(guān)節(jié)角度曲線2Fig.9 Joint angle curve 2
經(jīng)過(guò)仿真計(jì)算,上述運(yùn)動(dòng)過(guò)程軀干姿態(tài)變化如下圖10所示,由圖所示通過(guò)以上肢體組合動(dòng)作最終可使人體軀干在額狀軸方向偏移20°左右,并且由于人體以額狀面為對(duì)稱面進(jìn)行動(dòng)作,且雙臂在運(yùn)動(dòng)中起到一定平衡作用,相較于單肢體調(diào)整,軀干另外兩個(gè)未調(diào)整方向姿態(tài)角度偏移較小。
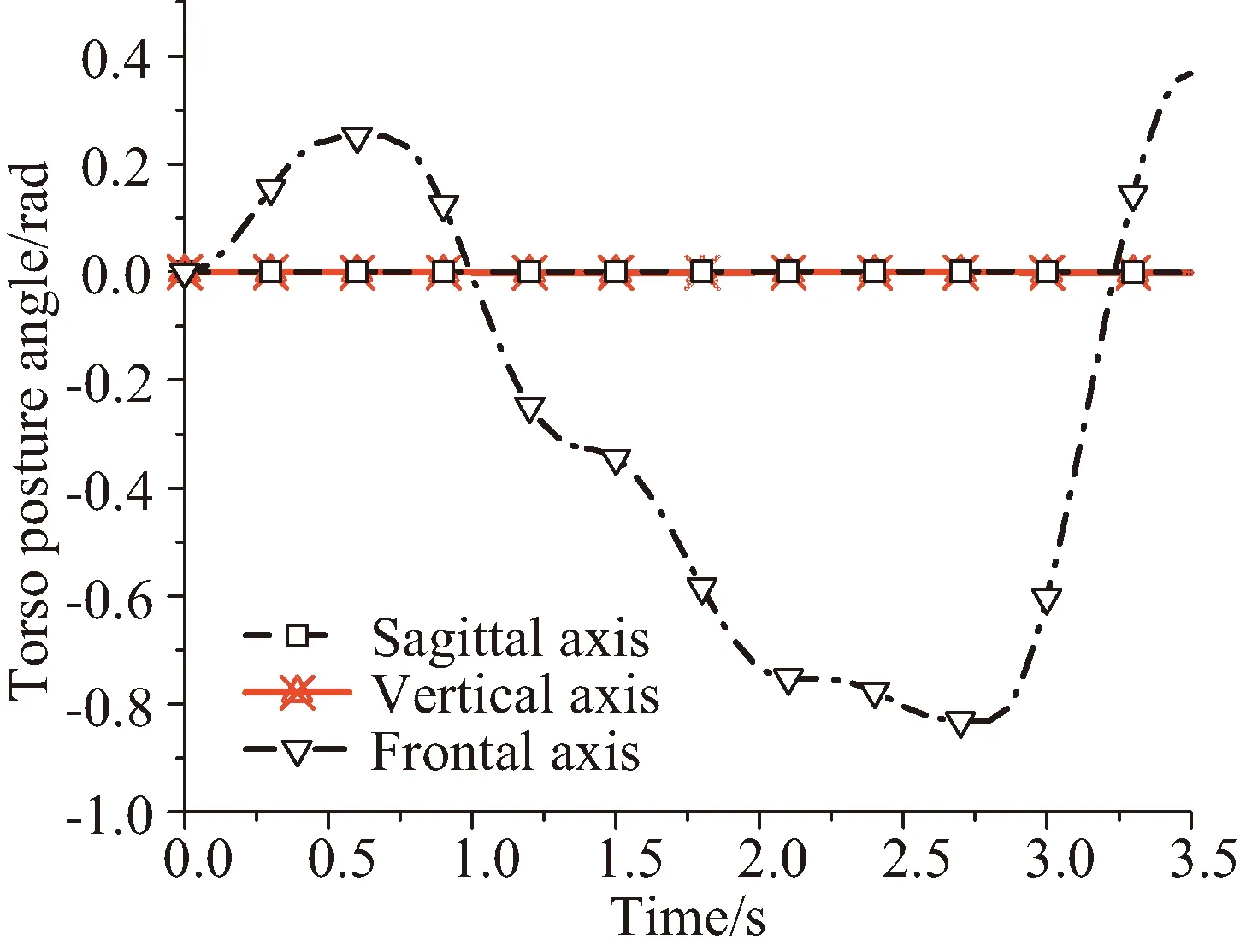
圖10 軀干姿態(tài)角度變化曲線2Fig.10 Torso posture angle change curve 2
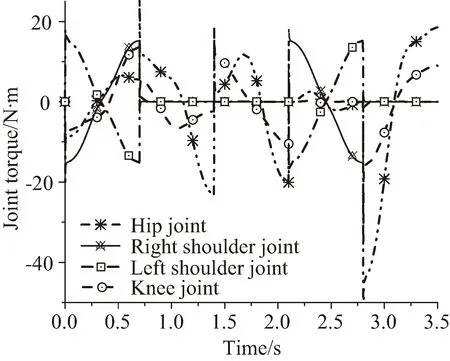
圖11 關(guān)節(jié)力矩曲線1Fig.11 Joint torque curve 1
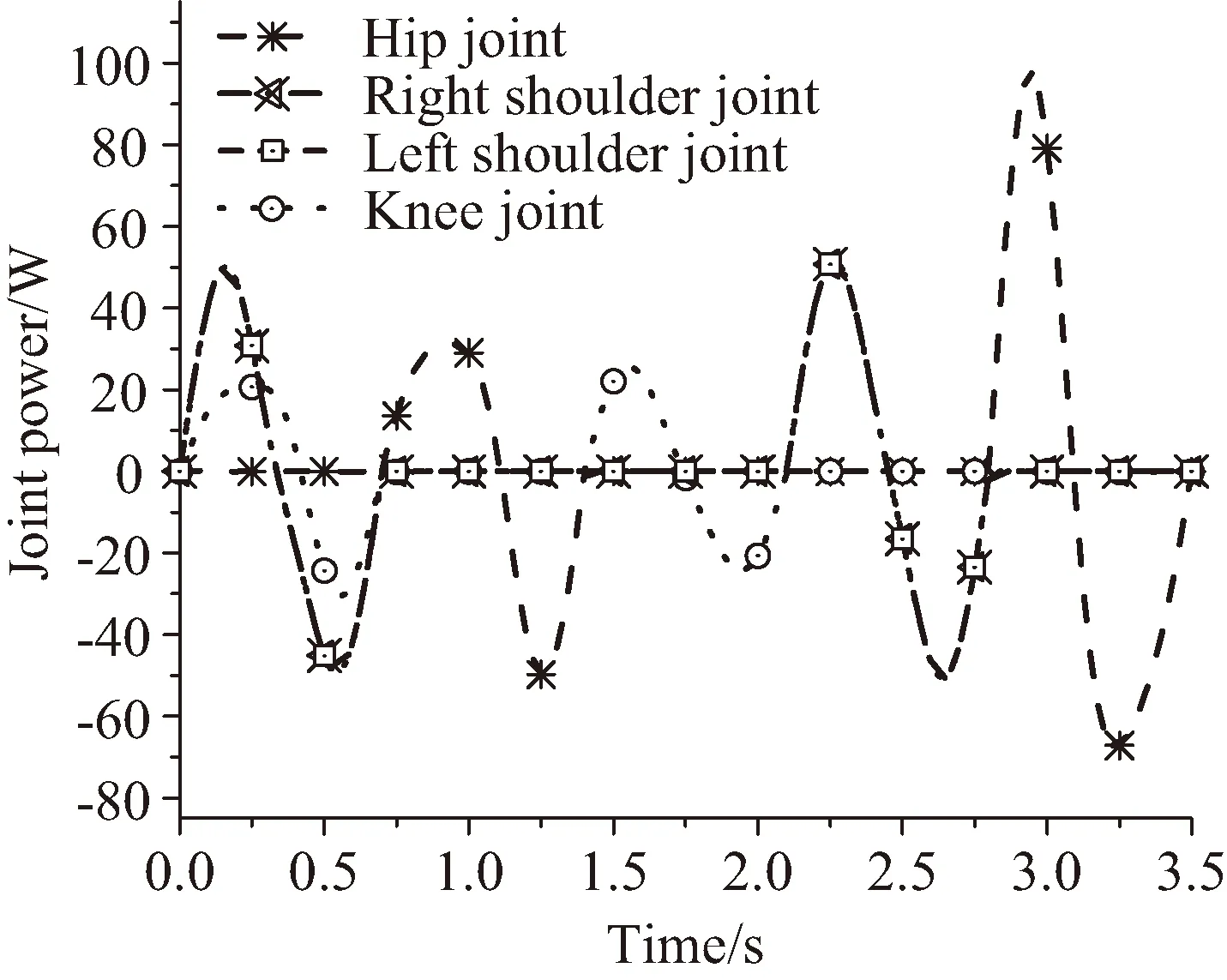
圖12 關(guān)節(jié)功率曲線1Fig.12 Joint power curve 1
(2)肢體協(xié)調(diào)軀干繞矢狀軸方向運(yùn)動(dòng)
由于人體質(zhì)量分布整體繞矢狀軸方向慣量較大且腿部關(guān)節(jié)在繞矢狀軸方向自由度存在約束限制,人體繞矢狀軸方向調(diào)節(jié)較為困難。根據(jù)對(duì)圖11、圖12中髖關(guān)節(jié)的力矩特點(diǎn)分析,設(shè)計(jì)人體下肢屈膝蜷在身前減小慣量,由雙臂在身側(cè)擺動(dòng)調(diào)節(jié)運(yùn)動(dòng)方向,具體運(yùn)動(dòng)過(guò)程如圖13所示。

圖13 人體四肢協(xié)調(diào)運(yùn)動(dòng)示意2Fig.13 Diagram 2 of coordinated movement of human limbs
圖14為關(guān)節(jié)角度曲線,圖15為人體軀干姿態(tài)角度曲線,從圖中可以看出,通過(guò)上述運(yùn)動(dòng)規(guī)劃最終可使軀干繞矢狀軸偏移30°左右,但由于人體結(jié)構(gòu)以及運(yùn)動(dòng)過(guò)程沿額狀面的非對(duì)稱性在運(yùn)動(dòng)過(guò)程中姿態(tài)在其他方向也存在偏移。
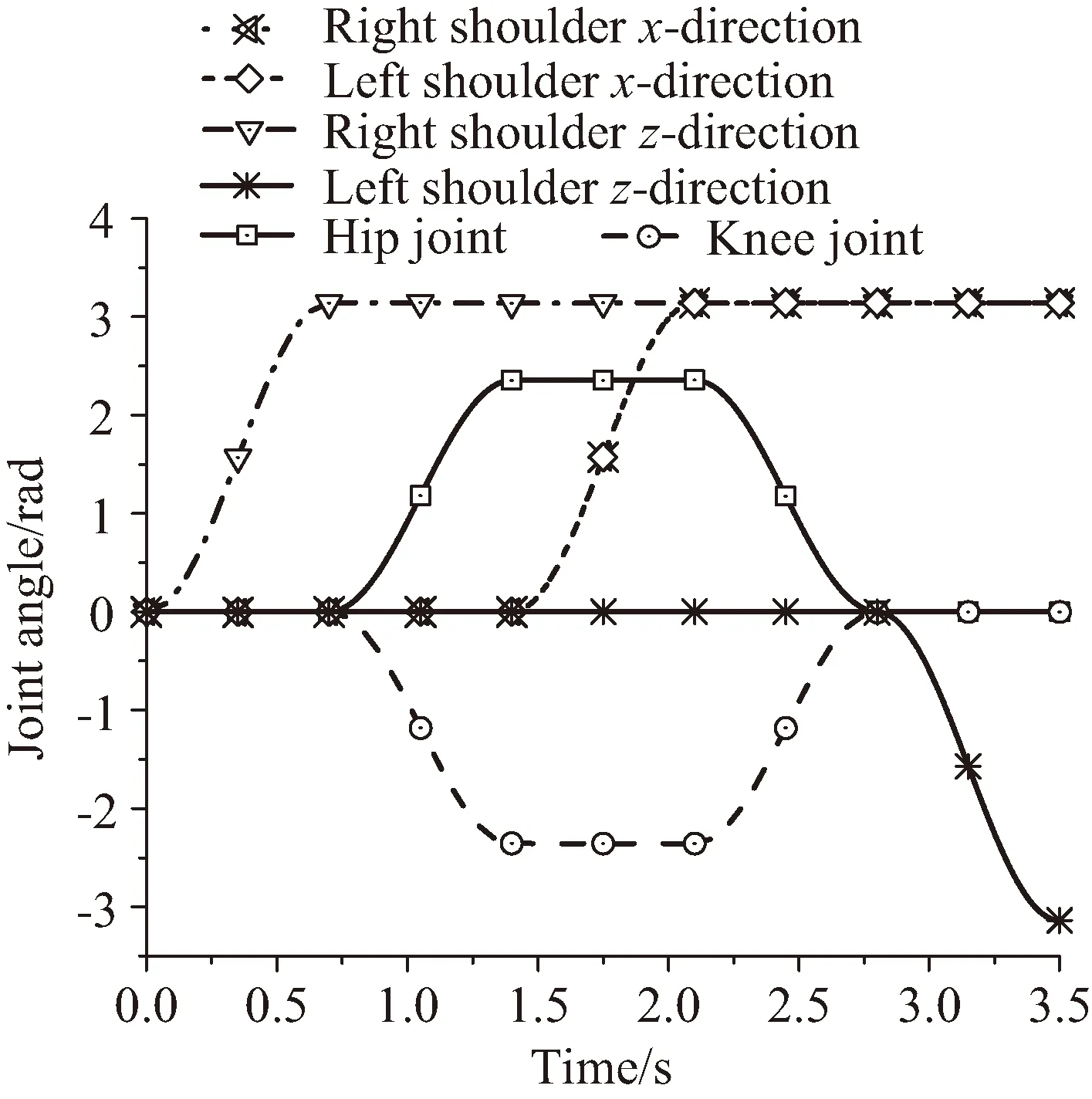
圖14 關(guān)節(jié)角度曲線3Fig.14 Joint angle curve 3
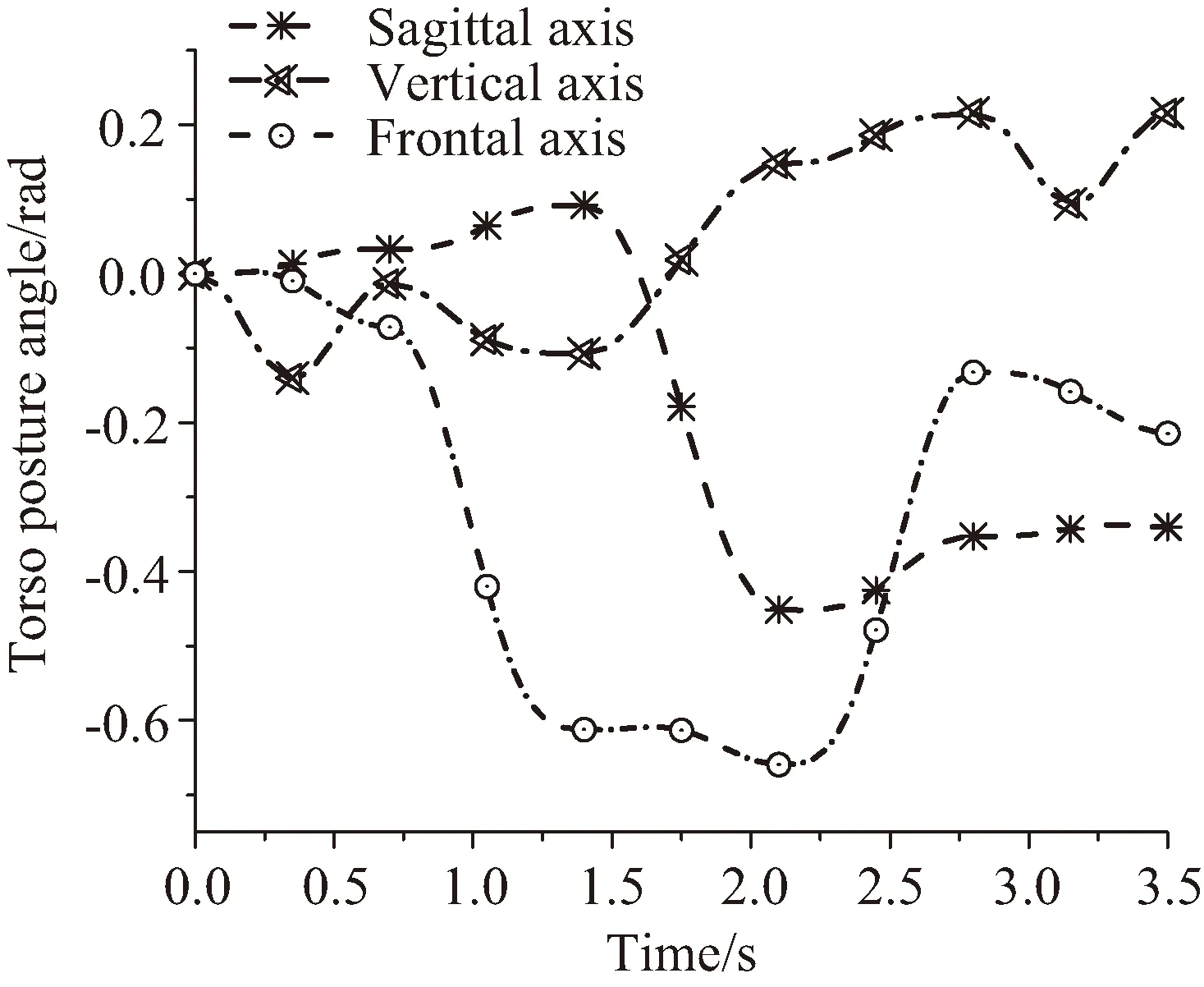
圖15 軀干姿態(tài)角度變化曲線3Fig.15 Torso posture angle change curve 3
計(jì)算得到圖16、圖17關(guān)節(jié)力矩及關(guān)節(jié)功率曲線,對(duì)比可得相似膝關(guān)節(jié)力矩、功率小于髖關(guān)節(jié)的結(jié)論,同時(shí)由于屈膝動(dòng)作使得髖關(guān)節(jié)運(yùn)動(dòng)功率明顯降低,肩關(guān)節(jié)在力矩和功率消耗相近的條件下使得軀干角度偏移更明顯。
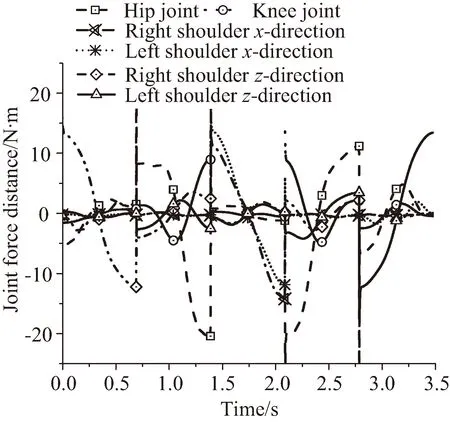
圖16 關(guān)節(jié)力矩曲線2Fig.16 Joint torque curve 2
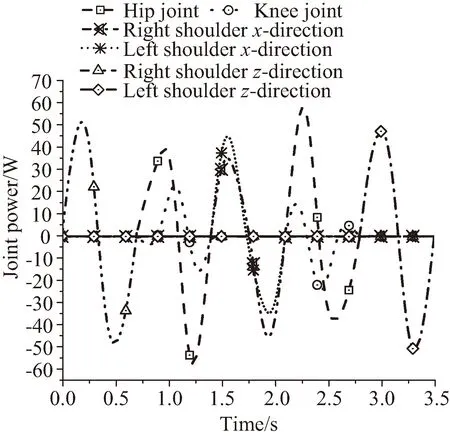
圖17 關(guān)節(jié)功率曲線2Fig.17 Joint power curve 2
4 結(jié)論
本文針對(duì)航天員在空間微重力特殊環(huán)境下的姿態(tài)調(diào)整問題,首先建立了人體系統(tǒng)動(dòng)力學(xué)與控制計(jì)算模型,其次對(duì)航天員通過(guò)肢體按相關(guān)運(yùn)動(dòng)策略進(jìn)行姿態(tài)調(diào)整的過(guò)程依靠動(dòng)力學(xué)模型仿真進(jìn)行驗(yàn)證。仿真顯示了:
1)人體依靠單肢體的簡(jiǎn)單調(diào)節(jié)以及四肢的協(xié)調(diào)運(yùn)動(dòng)均可實(shí)現(xiàn)無(wú)外力驅(qū)動(dòng)下軀干進(jìn)行一定程度的姿態(tài)主動(dòng)調(diào)整。
2)對(duì)比各運(yùn)動(dòng)關(guān)節(jié)的力矩、功率曲線說(shuō)明了在相同直臂條件下,腿部髖關(guān)節(jié)力矩大于上肢肩關(guān)節(jié),對(duì)于同一肢體上不同位置關(guān)節(jié),靠近軀干的關(guān)節(jié)力矩更大。因此在航天員關(guān)節(jié)助力設(shè)備設(shè)計(jì)時(shí)可針對(duì)受力較大關(guān)節(jié)進(jìn)行助力設(shè)計(jì)。
3)屈膝動(dòng)作可有效減小人體髖關(guān)節(jié)在抬腿過(guò)程的力矩及功率并且使上肢對(duì)軀干繞矢狀軸方向的調(diào)整作用更為有效。
本文基于MBDyn建立了人體系統(tǒng)動(dòng)力學(xué)模型,對(duì)微重力環(huán)境下航天員姿態(tài)調(diào)整策略進(jìn)行了動(dòng)力學(xué)驗(yàn)證。所得到的相關(guān)人體運(yùn)動(dòng)規(guī)律及動(dòng)力學(xué)特點(diǎn)對(duì)后續(xù)載人航天中任務(wù)動(dòng)作設(shè)計(jì)具有一定的參考意義,后續(xù)可圍繞運(yùn)動(dòng)穩(wěn)定性、人體建模精確性以及人-機(jī)交互等方面進(jìn)行進(jìn)一步的完善和深入研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
