人體下肢能量收集與行走助力外骨骼分析與評價
2022-04-22 13:44:26周欣劉更湯運啟韓冰劉曉麗
西北工業大學學報 2022年1期
周欣, 劉更, 湯運啟, 韓冰, 劉曉麗
(1.西北工業大學 陜西省機電傳動與控制工程實驗室, 陜西 西安 710072; 2.西安航空學院, 陜西 西安 710077;3.陜西科技大學設計與藝術學院, 陜西 西安 710021; 4.西安市兒童醫院, 陜西 西安 710003)
人口老齡化伴隨著人體生理機能的衰退,導致四肢運動性和靈活性下降。 此外,由于疾病或事故導致運動能力受損以致偏癱的患者越來越多,嚴重限制了活動能力[1]。如今,隨著醫學水平的不斷進步與發展,雖然挽救了無數患者生命,但是會遺留嚴重的后遺癥[2],最主要的是喪失獨立自主的行動能力。研究表明,如果能及時有效地對患者進行康復訓練,可以促進和恢復患者的運動能力[3]。
穿戴式康復外骨骼是一種依托康復醫學,結合機器人技術而快速發展的產物,可以對患者進行物理康復治療,生活運動輔助和機體功能恢復。康復外骨骼在人體運動的過程中實現功能增強或者代償功能[4]。
下肢外骨骼是一種新型的可穿戴助力機器人,通過機械設備與肌肉骨骼系統協同工作。其主要作用是通過對人體關節施加驅動力,用于輔助老年人和殘疾人行走、上下樓梯的康復[5]。
有源式外骨骼的驅動形式包含電機驅動、液壓驅動和人工氣動驅動等形式。例如哈佛大學研制的柔性踝關節外骨骼Exosuit[6],在人行走的過程中利用波登線將電機的輸出扭矩轉化為拉力,對患側踝關節提供助力,減小相應的肌肉收縮強度。美國加州大學設計的下肢外骨骼BLEEX[7],采用了擬人結構設計,下肢采用液壓驅動裝置,增強負重能力。美國密歇根大學研發了一由氣動肌肉驅動的踝部輔助外骨骼,利用肌電信號控制,用于康復訓練[8]。
無源外骨骼經常采用儲能元件進行驅動,例如Sawicki利用柔性傳動設計了一款踝關節外骨骼,采用彈簧將行走過程中的重力勢能轉換為彈性勢能進行收集[9]。Burton研發的背包式外骨骼[10],主要由纜繩和旋轉發電機組成。從行走中獲取機械能并轉化為電能,同時降低人體代謝消耗。
目前,大多數下肢外骨骼是采用電機驅動、外骨骼沉重、價格昂貴、電池續航能力有限等缺點限制了推廣與應用。由于人體蘊含豐富的能量,人們嘗試從人體與周圍環境中獲取能量[11]。人在行走過程中,雖然動能和勢能之間在不斷進行轉化,但是能量總是存在著損耗,并且主要以熱能、克服外界阻力做功或關節內部軟組織的磨損等形式消散。自然進化暫時決定了人體的結構和功能,但人類一直在探索提高能量利用效率[9]。
根據人體生理結構和運動特點,進行周期性儲存和釋放能量,將是一個很好的解決方案。本文提出一種人體下肢能量收集外骨骼,用于下肢運動功能障礙患者的康復訓練和運動輔助。
1 人體下肢生物力學分析
1.1 人體下肢力學模型分析
人體的各種運動和呼吸動作都是通過骨骼肌來完成。骨骼肌是人體中最多的組織,占體重的40%。在骨骼和關節的配合下,通過骨骼肌的收縮和放松,完成各種身體動作。人體下肢自然行走,可視為一個下肢各關節周期性循環的運動過程。
在人體下肢活動過程中,肌肉通常會根據不同的動作階段產生不同類型的收縮活動。人體的下肢主要由髖關節、膝關節和踝關節組成。從單側下肢足后跟著地開始,到同側下肢足后跟再次著地的過程是一個完整的步態周期。使用Opensim進行步態仿真[12],如圖1所示。
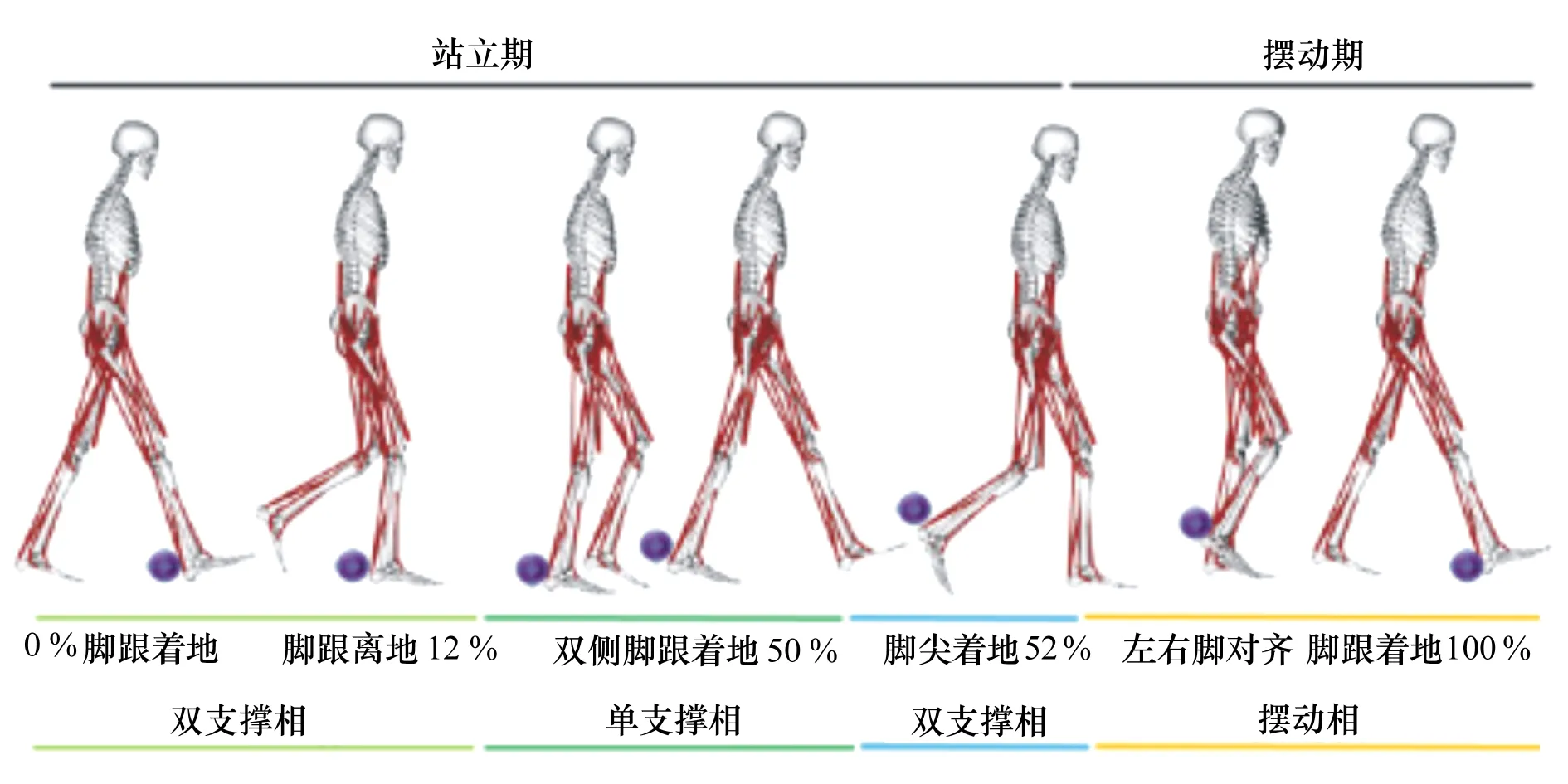
圖1 人體步態周期
建立下肢外骨骼的運動學數學模型,可以分析下肢外骨骼運動機理。根據人體下肢生理結構特點,下肢骨骼可假設為剛性連桿結構,各連桿之間通過關節連接構成多剛體鏈狀結構。使用簡化的行走下肢外骨骼的剛體五連桿模型,通過齊次變換矩陣與Jacobian矩陣分別對下肢外骨骼的運動位姿關系進行求解[13]。通過研究行走過程中系統各部分之間作用關系,確定下肢外骨骼各部位在廣義坐標系下的空間位置。
如圖2所示,對每根桿建立局部坐標系。1,2,3坐標系原點分別固定于站立腿的踝關節、膝關節、髖關節;坐標4,5,6的原點分別固定在擺動腿的髖關節、膝關節、踝關節處。其中,L為連桿的長度。
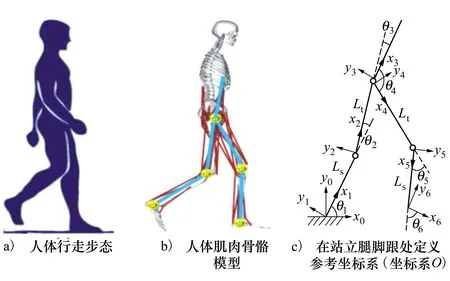
圖2 下肢外骨骼五連桿模型
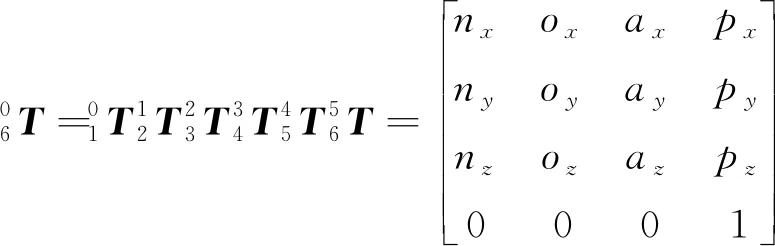
當人體行走時,通過運動學方程給出擺動腳在參考系中的坐標與關節角的關系。通過平移和旋轉參考坐標系得到局部坐標系i(i=1,2,3,4,5,6)。根據相鄰剛體連桿的2個局部坐標系的齊次變換矩陣,可以計算出末端執行器在參考坐標系坐標。
(1)
(2)
(3)
式中:ai為相鄰兩軸線i和i+1之間的距離;θi為繞軸從xi-1軸旋轉到xi軸的角度,且順時針為正。
擺動腳的空間位置與下肢髖、膝、踝關節的角度及左右大腿、小腿的長度有關。在人體步態分析中,步長Px通常定義為行走過程中兩足跟或兩足尖先后著地時前后方向的距離,步高Py通常定義為在腳離開地面最高的距離。
(4)
1.2 人體下肢步態測試與運動仿真分析
利用Vicon T40S光學運動捕捉系統進行步態測試實驗,對人體下肢關節的運動進行分析。實驗對象為一名男生,23歲,身高180 cm,體重65 kg。該受試者身體健康,無骨骼肌、神經等疾病,無手術史。在實驗前,被告知了實驗的目的和詳細的過程,并在征得同意后開始進行實驗[13]。
參考GB/T 10000-1988中國成年人人體尺寸[14]以及GB/T 17245-2004成年人人體慣性參數[15],取人體身高為180 cm,體重為65 kg為研究對象。鑒于人體自身組成的復雜多樣,將人體進行抽象和簡化成簡單的剛性幾何實體。
I=X0+X1M+X2H
(5)
式中:M表示自身質量;H表示身高,X0,X1,X2表示回歸方程的系數。
通過UG建立人體下肢簡化模型,選擇Parasolid格式導入ADAMS。依次進行運動副設置、驅動設置、仿真檢查、驅動函數設置、仿真環境設置后,仿真時間設置為0.87 s,仿真步數設置為1 000。
對人體下肢力學模型進行計算,獲得步長與步高曲線。并在ADAMS仿真模型中,在踝關節處添加標記點,通過測量標記點與地面之間的距離,可以獲得步高與步長曲線,如圖3a)與3b)所示。
絕對坐標系的原點規定在支撐腿與地面接觸的位置,當步長為負值時,表示擺動腿位于支撐腿的后面,步長為正值時,擺動腿位于支撐腿的前面。當左足離地時,步長為負,步長值約為-0.75 m。當左足擊地時,步長為正,步長值約為+0.75 m。對步高而言,當左足離地時,擺動腿末端距離地面0.06 m左右。在行走過程中,擺動腿末端先降低后升高,在步態周期45%左右,上升至最高點,步高0.1 m。
在大腿處和腳踝處設置標記點,測量在行走過程中的兩點距離變化曲線,如圖3c)所示。結果表明,腳踝與大腿處兩點之間的位置會隨著人體行走,發生周期性的變化,兩點距離變化可達0.1 m左右。
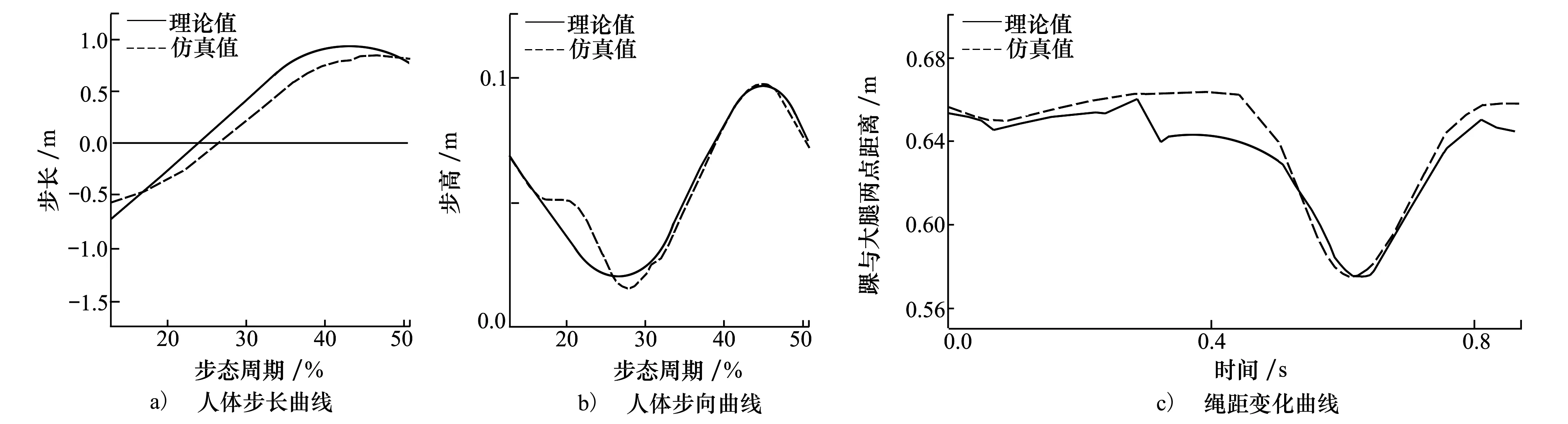
圖3 人體下肢關節運動學曲線
2 外骨骼傳動裝置結構設計
人體在運動過程中,下肢支撐并推動身體向前,會產生大量的動能。在加速或減速時,下肢關節需要消耗人體能量。如果利用外部機構在下肢減速階段將動能收集起來,降低能量消耗,可實現助力[16]。
對于健康人群,根據自身承受能力范圍,選擇合適剛度的卷簧進行儲能。小腿和踝足靠自重,在下落的過程中,足以驅動卷簧,系統無需額外做功。于單側下肢行走障礙的人群,患側下肢由于長期依賴健側下肢,患側下肢運動功能衰退,肌肉萎縮,活性下降。而健側下肢長期高負荷運動,造成身體重心偏移,步態改變,骨骼磨損加劇,但是健側下肢肌肉能力較強。因此,對于該部分人群,在身體可以負擔和接受范圍內,關節驅動剛度較大的卷簧儲存能量,付出額外做功,借助外骨骼實現能量收集與遷移,利用單側下肢對患肢進行運動補償。
外骨骼可以充分利用人體自身優勢,收集人體下肢能量,用于患側輔助運動,實現人體能量遷移的同時,達到人體平衡。通過外骨骼參與人體運動,使得患側下肢加強鍛煉,刺激患者中樞神經系統,重新掌握下肢的運動控制能力,并促進下肢肌肉群的協調運動,最終恢復運動能力。
在腿的伸展和擺動過程中,涉及到重力勢能參與能量轉換[17]。同時,兩腿的步態周期存在一定的相位差,滿足了跨肢體能量遷移的時間差。如果能將膝關節和踝關節在行走的過程中由關節產生的負功進行收集,經過能量管理,可在行走需要能量時進行釋放,實現能量遷移,輔助下肢行走。外骨骼工作時,參與人體能量流動循環,主要包含3個階段,如圖4所示。
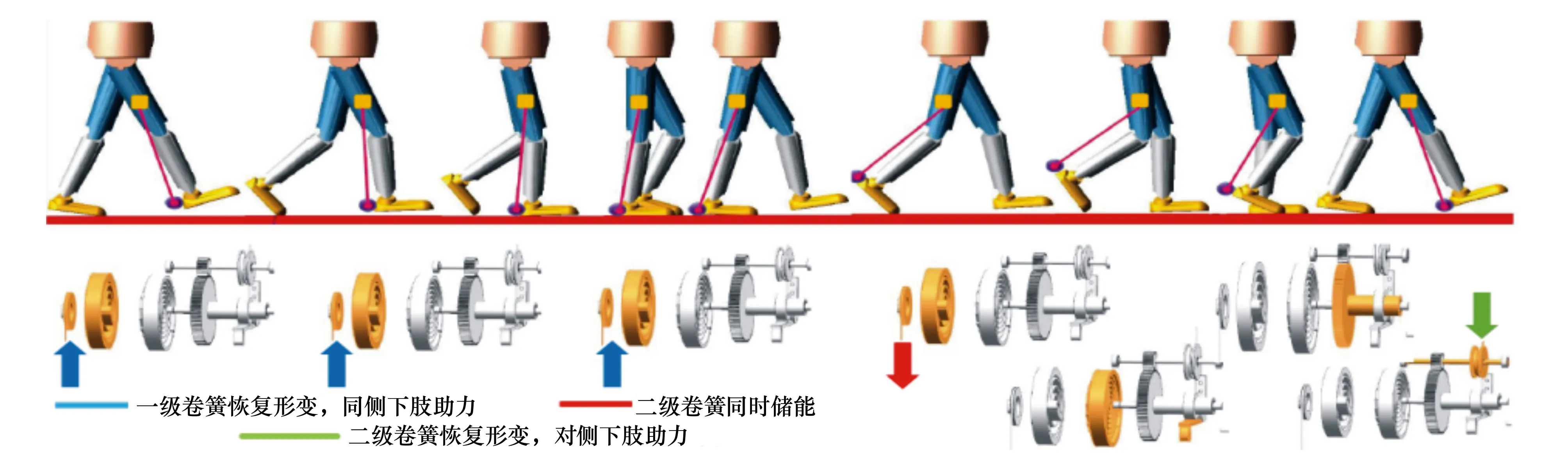
圖4 外骨骼能量流動圖像
人體能量收集器[18-19]安裝在大腿外側,傳動結構主要包括二級平面卷簧、棘輪棘爪、擺動式平面凸輪、齒輪等。柔性穿戴結構包括支撐架與彈性波登線,如圖5所示。充分發揮行走過程中步高變化,高效利用0.1 m左右的繩長變化,采用二級卷簧并聯設計。在棘輪棘爪傳動的同時,帶動兩級卷簧儲能。一級卷簧能量從外端釋放,用于下部分繩線收放,實現同側相鄰關節助力。借助凸輪控制,二級卷簧儲存能量從內端釋放,用于拉伸對側踝關節,實現下肢對側跨關節助力[20-21]。
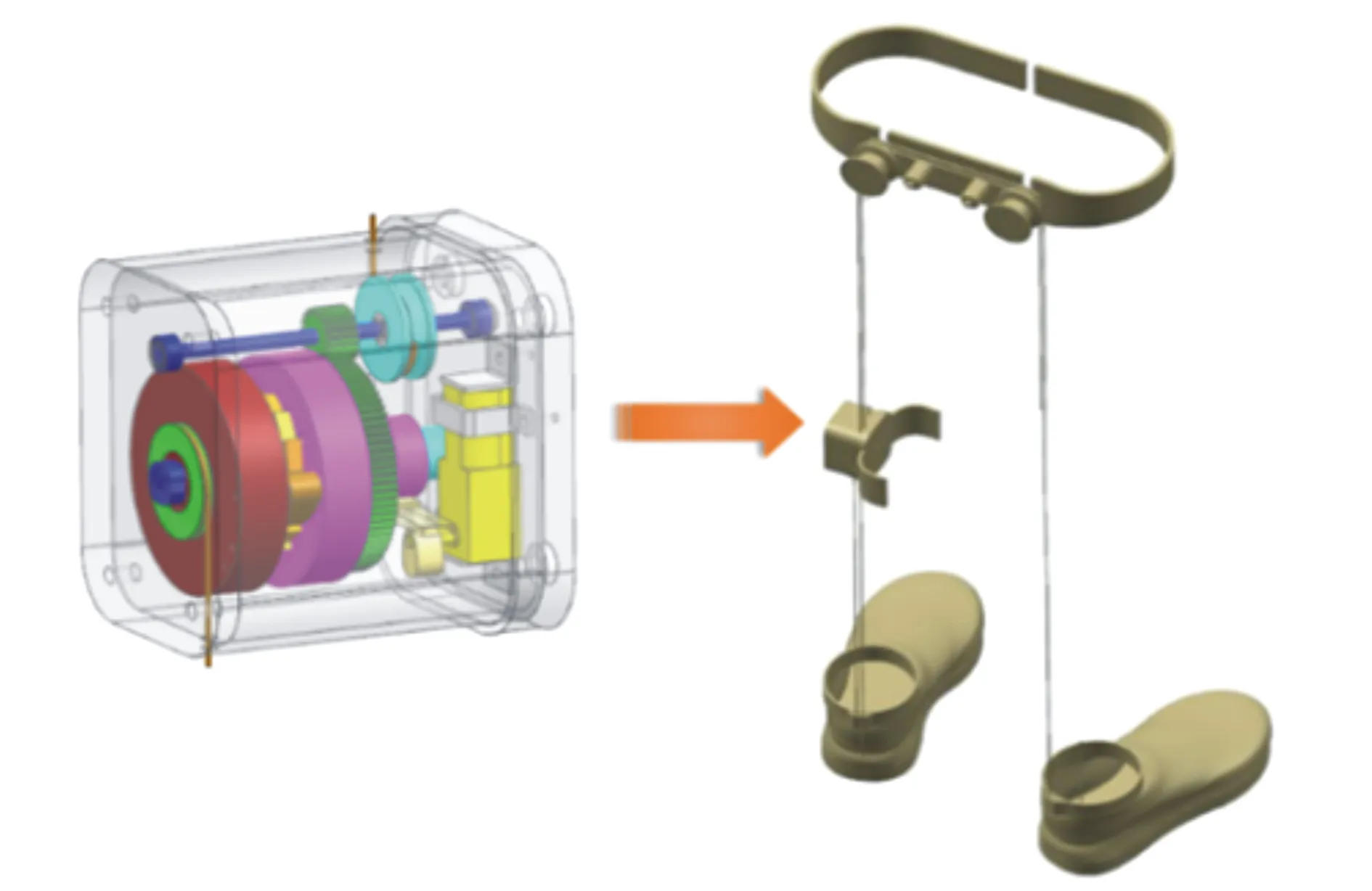
圖5 外骨骼傳動結構圖
相比于傳統剛性傳動外骨骼,本文設計的下肢可穿戴式能量收集與行走助力外骨骼具有以下優勢:①借助繩索柔性傳動,可以在下肢關節實現遠距離動力傳輸,為跨肢體能量遷移提供了保障。②傳動盒通過夾具固定在健側下肢的大腿處,遠離肢體關節,降低了外骨骼傳動裝置對于人體運動步態的干涉,同時降低了患側下肢的負載。③外骨骼傳動裝置緊湊、輕巧,穿戴舒適、安全與便捷。
3 人體穿戴實驗測試與評價
經過物理測試,表明外骨骼的功能滿足要求[17]。進行人體穿戴實驗,通過分析肌肉活性來更全面地評價外骨骼。考慮到肌肉的功能,肌肉表面的深度,肌肉位置。實驗選擇股直肌、脛骨前肌、股二頭肌、腓腸肌外側、腓腸肌內側進行測試分析,評估外骨骼的助力效果。
采用Delsys無線表面肌電測試設備,用脫毛器去除皮膚表面的毛發,并用75%的醫用酒精擦拭皮膚,隨后打磨皮膚表面,去除皮膚角質層。電極放置方向與肌纖維方向平行,電極通過電極貼固定。為了防止肌電塊在運動過程中松動脫落,使用皮膚膜包裹肌電塊,記錄表面肌電信號。
受試者在跑步機上行走,如圖6所示。測試速度由跑步機控制,觀察動態表面肌電信號波形及頻率。受試者對本研究的研究內容與實驗方案知曉,并簽署知情同意書。同時本實驗研究經西北工業大學醫學倫理委員會審批(No:202102005)通過。

圖6 人體穿戴外骨骼行走試驗
將行走中各測試肌肉的肌電信號原始數據劃分,提取單個步態周期,導入sEMG-Processing進行分析。將實驗所得數據截取一個周期并進行濾波、整流和包絡處理求得肌肉在一個步態周期內的活躍度變化,得到下肢肌肉在一個步態周期內的活動度與活動時序如圖7所示。測試各下肢肌肉的表面肌電信號在支撐期均表現活躍。

圖7 不同肌肉表面肌電信號包絡線
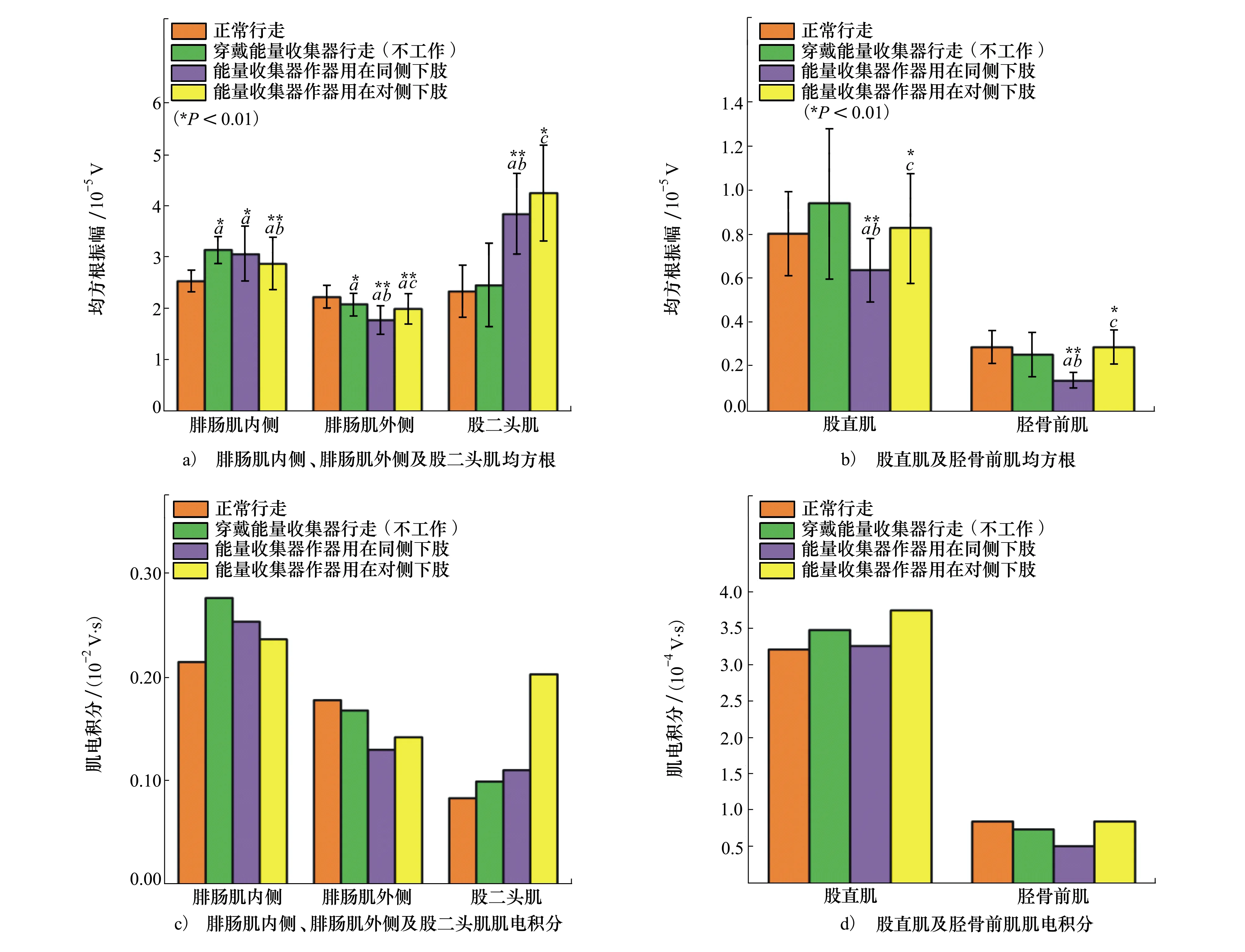
圖8 下肢主要肌肉肌電信號的均方根值與肌電積分值
定義:正常行走組為M1,穿戴能量收集器行走(不工作)組為M2,能量收集器作用在同側下肢組為M3,能量收集器作用在對側下肢組為M4。a表示與M1區有顯著差異,b表示與M2區有顯著差異,c表示與M3區有顯著差異。
均方根表示振幅的趨勢,反映了一段時間內肌肉放電的平均水平,為放電的有效值。均方根越大,肌肉力量和張力越高。肌電積分是對肌電信號進行整流濾波后得到的時間曲線下面積之和,反映肌電信號的強弱變化,是評價疲勞的重要手段。
對下肢所選肌肉進行肌電測試,結果顯示當受試者僅穿戴外骨骼行走(外骨骼不工作),除腓腸肌外側和脛骨前肌外,大部分肌電信號都略有增加。這是因為外骨骼是身體的外部結構,它會導致額外的肌肉代謝做功,并在走路時消耗能量。
穿戴外骨骼行走后,腓腸肌內側,腓腸肌外側,脛骨前肌,股直肌四組肌肉在單側下肢進行能量收集和釋放,肌肉的肌電信號時域指標均有下降,其中股直肌的均方根值,最高降幅可達10%。腓腸肌外側肌肉的肌電積分值降幅最明顯,可達12%,對下肢的影響作用較為明顯。
股二頭肌的均方根與肌電積分值均上升,一方面股二頭肌距離膝關節與踝關節相對較遠,另外這可能與下肢肌肉之間的相互作用有關,這有待進一步科學實驗與分析。另外,外骨骼對肌肉的影響效果還應廣泛增加實驗樣本,下一步尤其是增加不同程度的下肢運動障礙患者的樣本數量。綜上所述,穿戴外骨骼行走時,可以降低部分主要肌肉活性。
4 結 論
本文為下肢運動障礙患者提供一種輔助行走解決方案。利用彈性儲能可收集下肢關節的能量,獲得較大的機械能,并且參與能量管理與釋放,為下肢運動障礙患者提供單側下肢輔助,實現能量遷移。
原理樣機經過物理測試,結果表明外骨骼為對側腿提供輔助拉力。本文通過人體穿戴實驗進行功能評價,結果表明,外骨骼可以降低部分肌肉的力量和活性,具有一定的助力效果。相信隨著后續研究工作的不斷完善,將會提出更加高效的人體能量收集器,更加科學規范的評價標準,為患者的健康行走,貢獻一份力量。