防御性制空截擊中警戒巡邏空域規劃建模
2022-05-07 08:26:00徐鑫宇萬路軍戴江斌高志周
系統工程與電子技術 2022年5期
關鍵詞:規劃
徐鑫宇, 萬路軍,,*, 陳 平, 戴江斌, 高志周
(1. 空軍工程大學空管領航學院, 陜西 西安 710051;2. 空中交通管理系統與技術國家重點實驗室, 江蘇 南京 210007)
0 引 言
在防御性制空截擊作戰中,為保衛己方高價值目標,提升應對敵機空襲時的反應速度,通常在敵機主要威脅方向預先劃設警戒巡邏空域,供殲擊航空兵以較少兵力在指定空域和規定時間內進行警戒飛行,確保我機能夠在第一時間截擊、殲滅來襲敵機,或在發現敵機后引導己方地面兵力攻擊敵機。因此,如何科學合理地規劃出警戒巡邏空域,確保能夠在截擊線上截擊敵機,又能保證我機自身的安全,是航空兵遂行截擊作戰任務亟需解決的關鍵問題之一。
軍航飛行的特殊性,決定了與民航飛行空域規劃有顯著的區別。由于軍民航之間對空域的定義以及管制權限的不同,造成軍民航對空域規劃有不同的理解與認識。民航空域規劃是指對某一給定空域,通過對未來空中交通流的預測,根據空中交通流的流向、大小與分布,對區域范圍、航路航線的布局、位置點、高度、飛行方向、通信/導航/監視設施類型和布局等進行設計和規劃,并加以實施和修正的全過程。主要涉及規劃、調整航路航線、不同管制區域的扇區、進離場程序等,空域種類較少,規劃時考慮的主要因素是空中交通流量分布情況、空中交通管制服務的手段和方式、城市建設及安全保證等,以安全性為第一要務,目的是在保證安全的前提下,維護并加速空中交通的有序活動、提高經濟效益。軍航空域規劃是指根據敵我態勢、我方兵力技戰術水平和上級指揮員意圖,確定出空域的位置、大小、方向和高度范圍等參數,供任務部隊實施的過程。在軍事行動中,為滿足多樣的任務需求,所需規劃的空域種類多樣,規劃時考慮的主要因素為己方兵力部署、要達成的預期目標和敵方威脅等,目的是確保完成作戰任務、有序進行空中作戰和充分發揮作戰效能,以效能為第一要務。
目前軍航空域規劃的相關文獻相對較少。其中文獻[19-22]對電子干擾、空中加油等幾種典型任務空域進行規劃,其核心思想是選取幾個關鍵參數構建指標函數,而后采用遺傳算法、灰狼算法等群體智能算法不斷尋優。此類方法將空域規劃問題轉化為優化問題,為空域規劃提供了可行的思路,但指標函數的構建是否合理對空域規劃的結果影響很大。文獻[23-25]采用幾何分析方法,研究了航母編隊中艦載機的空域配置問題,其中文獻[23]分析了不同場景下殲擊機的前出距離和行動方法,文獻[24]定義了艦載戰斗機空中巡邏空域部署優化的決策變量,建立了一種多目標規劃模型,文獻[25]著重探討了艦載機執行警戒巡邏任務的時機。該方法模型構建較為簡單直觀,能夠快速求解,但對空域這一三維立體空間的高度范圍和方向考慮較少,并且航母編隊中要保衛的高價值目標和飛機起降平臺均為航母本身,而防御性制空截擊中我方截擊飛機起降平臺為機場,敵方要打擊的高價值目標可能是我方的指揮所、雷達站、地面部隊集結點等戰略要地,二者位置往往并不一致。
本文以一般情況下防御性制空截擊作戰時警戒巡邏空域規劃為研究對象。空域規劃過程可簡要歸納為確定空域的方向、位置、數量和高度。首先,根據兵力部署規劃出截擊線的位置,由截擊線確定截擊范圍;其次,在整個截擊范圍內,構建敵機威脅評估指標,評估敵機不同突擊航線對應的威脅值,由威脅值最大的航線對應的角度確定出空域的方向;然后,在空域可規劃范圍內,確定出可規劃空域的位置和數量;最后,根據敵機可能的突擊高度,結合我機性能指標確定出空域的高度范圍。從而構建一套完整包含空域方向、位置、數量和高度的警戒巡邏空域規劃模型。通過仿真實驗,驗證了模型的合理性和有效性。
1 警戒巡邏空域的約束分析
防御性制空截擊是指殲擊航空兵在指揮機構的引導下,對敵空中目標實施攔截與攻擊的戰斗行動,是殲擊航空兵基本的戰斗活動方法。敵機的作戰意圖為對我方高價值目標實施打擊,我機需要在截擊線上擊落敵機,以保證目標的安全。防御性制空截擊中我方飛機的截擊方式可分為從機場待戰轉入截擊和從空中待戰轉入截擊兩種,二者共同完成截擊任務。機場待戰飛機通常按規定的戰斗準備等級在機場待命,在指揮所分析、研判雷達情報信息后,下達起飛命令,并引導升空的飛機飛向預定的截擊線實施空中截擊。而空中待戰飛機需要提前升空,飛往預先規劃好的警戒巡邏空域待命,發現敵機后作為第一梯隊首先投入戰斗,為機場待戰飛機起飛迎敵贏得時間。警戒巡邏空域是指為空中待戰飛機實施空中警戒、巡邏和待戰等任務而預先劃設的空域。規劃警戒巡邏空域的約束條件包括大小和方向約束、位置約束、數量約束和高度范圍約束。
1.1 大小和方向約束
執行警戒巡邏任務的飛機在規定的時間和空間內,通常采用雙180°跑道型或者“8”字型航線遂行警戒巡邏。其中,“8”字型航線適用于空中側風較大的情況,屬于特殊條件下的跑道型巡邏航線。而在實際飛行中,由于高空風以及導航誤差的影響,飛機可能無法精確地沿預定航線飛行,因此需要在航線周圍設置一定的安全余度,防止執行警戒巡邏任務的飛機與執行其他任務飛機產生飛行沖突,故警戒巡邏空域形狀通常為矩形,如圖1所示。
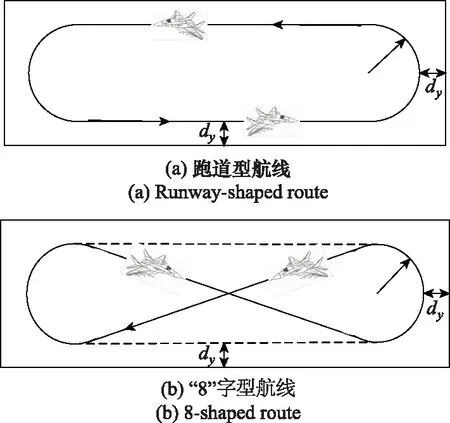
圖1 兩種警戒巡邏方式Fig.1 Two alert patrol modes
當飛機選擇跑道型航線時,警戒巡邏空域的長邊和短邊分別為
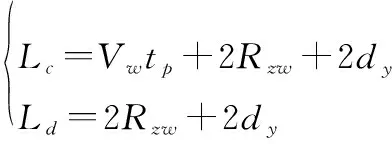
(1)
當飛機選擇“8”字型航線時,警戒巡邏空域的長邊和短邊分別為
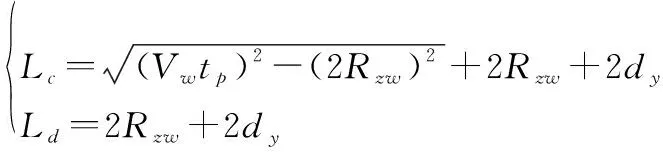
(2)
式中:為我機飛行速度;為平飛時間;為安全余度,通常取5 km;為轉彎半徑,其計算公式為

(3)
式中:為重力加速度,通常取98;為轉彎坡度。
警戒巡邏空域的長邊應當面向敵機最大威脅方向,目的是發現敵機后能夠盡快出擊,短邊與長邊垂直。因此,空域的方向定義為敵機最大威脅航線的斜率對應的角度。
1.2 位置約束
警戒巡邏空域的劃設位置應當滿足以下約束條件:
(1) 警戒巡邏空域位于作戰責任區和截擊線內側,且與截擊線、作戰責任區分界線的距離不小于5 km;
(2) 警戒巡邏空域劃設在己方雷達、通信保障范圍之內,地面防空火力范圍之外;
(3) 警戒巡邏空域的位置應能保證我空中待戰飛機出擊時,能夠在截擊線上任一點截擊敵機。
1.3 數量約束
為提高截擊成功率,確保己方保衛目標的安全,在空域可劃設范圍內通常劃設多層警戒巡邏空域。空域數量根據空域可劃設范圍的大小、空域的大小、方向以及空域安全間隔確定。空域安全間隔是指為防止相鄰空域內的飛機發生飛行沖突,而規定的空域之間應滿足的最小距離。間隔設置過大會造成有限的空域資源浪費,過小則可能導致相鄰空域內飛機產生飛行沖突,一般設置為5 km。
1.4 高度范圍約束
警戒巡邏空域具有一定的高度范圍,為保證我機在機動時間內通過爬升和下降,能夠完全覆蓋敵機可能的飛行高度范圍,必須結合我機的性能指標確定出空域的高度范圍。超出這個高度范圍,我機可能無法在規定的時間內占據有利高度,影響截擊任務的完成。
2 警戒巡邏空域規劃建模
2.1 問題描述
在我方機場和空中待戰飛機需要共同實施截擊作戰,確保在截擊線上擊落敵機,保證我方高價值目標的安全。由于空中待戰飛機需要預先飛往指定的警戒巡邏空域執行警戒巡邏任務,因此如何根據己方兵力部署以及敵我態勢,建立量化的、流程驅動的警戒巡邏空域模型,對于我空中待戰飛機完成截擊任務至關重要。同時避免因僅靠個人經驗導致空域規劃不夠理想,使得我機無法在預定截擊點完成截擊任務的情況發生。結合截擊作戰特點,模型設計做出以下假設:
(1) 己方雷達發現敵機的位置與己方保衛目標的連線即為敵機突擊航線;
(2) 我機的飛行速度保持不變;
(3) 忽略因飛行高度變化導致的我機爬升率和下降率的變化。
2.2 確定作戰責任區和己方兵力部署
作戰責任區為上級明確的己方部隊負責的作戰區域,通常為多個點連接而成的多邊形區域。己方兵力部署主要考慮己方機場、通信設施、預警雷達和地面防空火力的部署位置及作用范圍。己方作戰責任區和兵力部署如圖2所示。
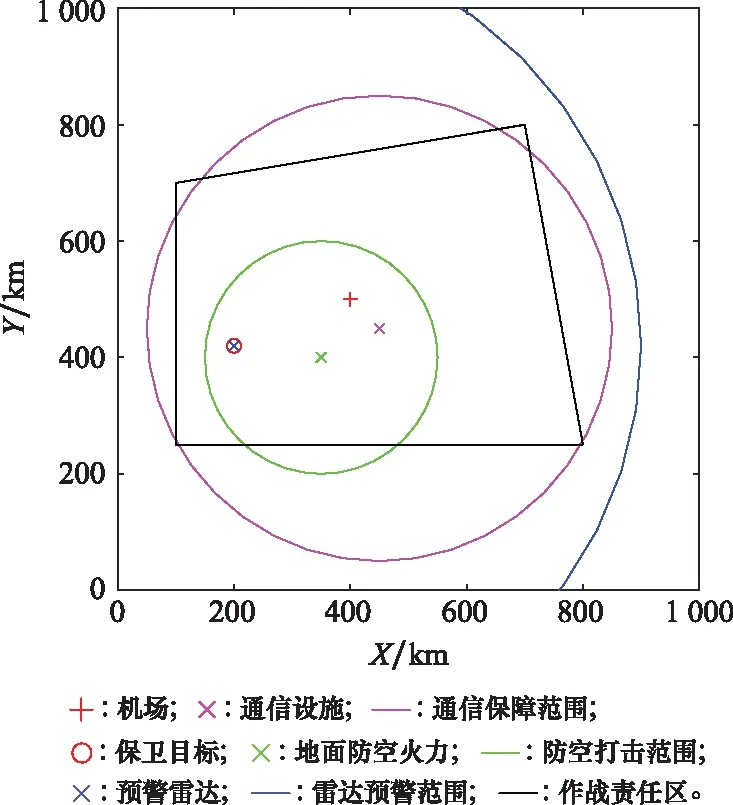
圖2 己方兵力部署Fig.2 Our troops deployments
設己方通信設施的位置坐標為(,),通信保障半徑為,則通信保障范圍方程為

(4)
同理,由己方雷達部署位置及預警半徑確定雷達預警范圍方程;由己方地面防空火力陣地部署位置及殺傷半徑確定殺傷范圍方程。
2.3 確定截擊線
截擊線是指我機投入到對敵機的攔截與攻擊時,擊落敵機的點所連成的線。目前,截擊線大多是根據經驗臨時劃設,缺乏科學的手段。必須首先解決截擊線劃設問題,才能在此基礎上進行警戒巡邏空域規劃。因為少量的空中待戰飛機不足以應對敵機空襲,截擊線的劃設位置要確保機場待戰飛機能夠有足夠的時間起飛迎敵,對敵機進行截擊。因此截擊線的劃設要綜合考慮己方機場位置、飛機的作戰半徑、地面防空火力殺傷范圍、通信保障和雷達預警范圍等因素,同時滿足以下3個約束條件:
(1) 截擊線距己方保衛目標的最小距離要大于敵機所攜帶空對地導彈的最大射程,保證我機在截擊線上截擊敵機時,敵機無法對己方保衛目標進行打擊。
(2) 截擊線距己方機場的最大距離要小于我機的作戰半徑,否則,己方機場待戰飛機在執行完截擊任務后無法順利返航。
(3) 截擊線劃設在己方通信、雷達保障范圍內,使得指揮所能夠對我機進行有效指揮引導。同時,截擊線劃設在地面防空火力之外,以避免遭到誤擊誤傷。
由于敵機所選擇的突擊航線預先是不可知的,因此考慮在敵機的威脅方向上,按照每5°模擬出一條敵機的突擊航線,在每條突擊航線上計算出對應的截擊點,各個截擊點連成線即為截擊線。截擊線確定方法如圖3所示。
圖3 截擊線確定方法Fig.3 Method for determining interception line
假設點為己方保衛目標點,己方預警雷達發現敵機的位置為點。發現敵機后,經過雷情上傳指揮所、指揮所給己方機場待戰飛機下達起飛命令、起飛、出航、上升到航線高度、沿航線平飛、接敵這一連串過程。在這段時間內,除去我機沿航線平飛的時間,敵機的前進距離為
=(++++)·
(5)
式中:為敵機飛行速度;為雷情傳遞時間;為己方機場待戰飛機從接到命令到準備好起飛所用時間;為從起飛到機場出航點所用時間;為從出航點上升到航線高度所需時間;為接敵時間。敵機從點前進距離到達′點,設截擊點集合為(=1,2,…,),己方機場到點′點的距離為,己方機場到截擊點的距離為,′點到截擊點的距離為。從己方機場位置向敵機突擊航線做垂線,交點為′,己方保衛目標點到′點的距離為Δ,則
=-±Δ-cos(180°-)
(6)
令=-±Δ,設我機與敵機的速度比為,則在相同飛行時間內有=,式(6)可轉化為=+cos。根據余弦定理有=+-2cos,轉化為

(7)
、、均可計算得出,此時式(7)為一元二次方程,可解得兩組,繼而對應解出兩組。值的約束條件為我機的作戰半徑,若≤,則求得的值符合實際;反之,應取代替,反求出。由=arccos[(-)],計算出,即為我機場待戰飛機出擊航線與敵機突擊航線的夾角。設己方機場與保衛目標所在直線的斜率為,敵機突擊航線斜率為,我機出擊航線斜率為,有

(8)
由斜率和機場坐標可求出我機出擊航線方程。敵機突擊航線與我機出擊航線的交點即為截擊點,由各截擊點依次連接成截擊線。同時,應保證截擊線滿足約束條件,進而形成最終的截擊線。
2.4 確定空域的方向
在保證完成截擊任務的同時,要盡可能保存我機有生力量,而敵機選擇不同的突擊航線對我機構成的威脅不同,因此需要根據敵我態勢構建威脅評估模型,評估出敵機不同突擊航線對應的威脅值,并篩選出對我方威脅最大的敵機突擊航線。警戒巡邏空域的長邊與垂直,空域的短邊與之平行,空域方向的數值等于的斜率對應的角度。如圖4所示,本文綜合考慮截擊作戰特點,選擇敵機與我機的相對角度、敵機速度和敵我距離3項指標,構建威脅評估模型。采用灰色主成分分析法評估敵機不同來襲方向的威脅值,利用灰色關聯系數矩陣取代傳統主成分分析法的協方差矩陣,消除了指標數據之間量綱差異,同時避免了因數據的標準化處理對主成分降維效果的影響。本文對威脅評估指標的計算過程不再贅述,可參考文獻[27]。

圖4 敵機威脅態勢Fig.4 Threat situation of enemy aircraft
(1) 角度威脅指數

(9)
式中:為我機航向到目標線夾角;為敵機航向到目標線夾角。和的方向規定逆時針為正,取值范圍為[-180°,180°]。
(2) 速度威脅指數

(10)
(3) 距離威脅指數
(11)
式中:為在敵機威脅方向上模擬出的敵機突擊航線的總條數;為某條突擊航線′點到截擊點的距離在條航線中按從大到小排序的序號。
2.5 確定空域可劃設范圍
截擊線劃定之后,考慮在敵機來襲方向上,以較少飛機預先起飛進入警戒巡邏空域內飛行,以便發現敵機后迅速前出截擊,并引導機場待戰飛機起飛對敵機實施攔截。根據我機采用的截擊戰術確定出警戒巡邏空域的可劃設范圍。截擊戰術一般可分為轉彎截擊或迎頭截擊,其中轉彎截擊方式為后半球攻擊,優點是相對容易建立攻擊態勢,并能夠連續攻擊,提高截擊成功概率,缺點是建立攻擊態勢所需時間較長。迎頭截擊為前半球攻擊,優點是能夠縮短攻擊時間,我機在完成攻擊后能夠迅速脫離;缺點是我機與敵機相對飛行,瞄準射擊時間短促,第一次攻擊不成很難再次攻擊,且我機在攻擊前需要考慮如何機動才能建立一定的角度優勢。
轉彎截擊如圖5所示。己方預警雷達發現敵機時,我空中待戰飛機位于警戒巡邏空域內,經過傳遞雷達情報、指揮所下達出擊命令后,率先對敵機進行截擊。我機在點開始向出擊方向轉彎至點改平,平飛一段時間后在點轉彎接敵,在截擊點截擊敵機。我機由點到點的出擊轉彎時間和點到點的接敵轉彎時間的大小,與出擊前我機的航向以及敵機相對于我機的位置有關。
圖5 轉彎截擊Fig.5 Turning interception
為了使我機在各種情況下均能來得及在截擊線上截擊敵機,應當按可能出現的轉彎時間最大值,即180°轉彎時間進行計算,需要根據接敵態勢確定,則
(12)
=+
(13)
式中:為我機預計攻擊時間,由戰術確定。此時我機由點到點的直線飛行距離,等于警戒巡邏空域至截擊點的最大允許距離,故
=||=
(14)
式中:是我機出擊后由到的平飛時間。從圖4中可以看出,等于敵機由點到點的飛行時間減去雷情傳遞時間、和,即
(15)
式中:為敵機從雷達發現點到截擊點的飛行距離。故從警戒巡邏空域到預計截擊點的最大允許距離表示為

(16)
迎頭截擊如圖6所示。我機在警戒巡邏空域內向截擊點方向轉彎,至點改平后,直接向截擊點飛去,從警戒巡邏空域到預計截擊點的平飛時間和最大允許距離為
(17)
(18)
式中:、、、、都是常量,此時是的函數。由于己方在進行警戒巡邏空域規劃時是預先規劃,并不清楚敵機具體的突擊航線,因此敵機在威脅方向范圍內選擇不同的突擊航線時,己方雷達發現敵機的位置點與對應的截擊點之間的距離不同,故截擊線上不同截擊點所對應的也不相同。在進行警戒巡邏空域規劃時,必須保證在敵機整個威脅方向范圍內,在警戒巡邏空域中飛行的我機都能對其實施截擊。
圖6 迎頭截擊Fig.6 Head-on interception
設截擊線與作戰責任區上下邊界的交點分別為和,經過和點的突擊航線斜率分別為和。若敵機的突擊航線斜率在區間[,]范圍之外,則不屬于我作戰責任區的截擊范圍,由相鄰作戰責任區負責截擊。因此,在警戒巡邏空域內飛行的我機若能夠在和點均能截擊敵機,則能夠保證在截擊線上任意一點截擊敵機。
依據我機選擇的截擊戰術,由式(16)和式(18)分別計算出截擊點為和時,所對應的最大允許距離。其次,分別以和點為圓心,以警戒巡邏空域到兩點的最大允許距離為半徑作圓,我機在兩個圓的相交區域活動就能保證在截擊線上截擊敵機。同時,加上空域的位置約束,得到的范圍就是警戒巡邏空域的可劃設范圍,如圖7所示。
圖7 空域可劃設范圍Fig.7 Scope of airspace
2.6 確定空域位置和數量
由于空域的長邊要與威脅值最大的敵機突擊航線垂直,因此在空域可劃設范圍內作與垂直的直線,交范圍于、兩點,計算、兩點間距離||,找到最靠近我方保衛目標且剛好滿足||=的線段,如圖8所示。

圖8 空域的位置和數量Fig.8 Location and amount of airspace
由于警戒巡邏空域的邊界要滿足與截擊線、地空火力邊界線的距離不小于5 km的約束條件,因此將線段所在的直線沿著的方向向右平移5+2,交范圍于、。若滿足||≥,則線段的中點即為第1個警戒巡邏空域的中心點,轉入步驟3;否則在空域可劃設范圍內無法規劃出警戒巡邏空域。
由于相鄰空域間仍要滿足5 km的安全間隔,則兩個相鄰空域中心點之間的距離=5+,將所在的直線沿著的方向平移距離,交范圍于、。若滿足||≥,線段的中點即為第2個警戒巡邏空域的中心點;否則,在范圍內只能規劃出1個警戒巡邏空域。依此類推,求得所有滿足條件的空域中心點坐標的數量,即為空域可劃設范圍內能夠規劃出警戒巡邏空域的數量。
當在空域可劃設范圍內,均無法滿足||≥時,說明空域可劃設范圍過小而無法規劃出警戒巡邏空域,此時的解決方案如下:
(1) 縮短空域的長邊。由于飛機的轉彎半徑相對固定,空域短邊長度固定,因而可減小我機沿警戒巡邏航線的平飛時間,繼而縮短空域長邊的長度。
(2) 平分截擊范圍。將己方作戰責任區內的截擊范圍平均分成兩部分。將這兩部分截擊范圍看成兩個相對獨立作戰責任分區,按照本節的方法,重新確定各分區內的空域可劃設范圍,在各分區內分別確定警戒巡邏空域的位置和方向,如圖9所示。
圖9 平分截擊范圍Fig.9 Split interception range
設中心點坐標為(,),空域的4個角點坐標分別為(,),(,),(,),(,)。空域的4個角點坐標的計算公式為

(19)
式中:為空域的方向。
3 警戒巡邏空域的高度范圍
為保證截擊任務的完成,警戒巡邏空域的高度范圍需要根據我機的升限及敵機可能的突防高度范圍來確定,保證能夠對敵機可能的突防高度進行全覆蓋。根據我機的爬升率和下降率,得到在可調整時間內所能爬升的高度Δ和下降的高度Δ:
Δ=·
(20)
Δ=·
(21)
我機在投入攻擊前,為占據有利攻擊態勢,通常選擇比敵機更高的飛行高度以建立高度優勢,此時兩機對應的高度差即為接敵高度Δ。我機警戒巡邏空域高度的上限與下限需要分別結合敵機可能突防高度的上下限進行計算,如圖10所示,具體步驟如下。
圖10 空域高度范圍Fig.10 Altitude range of airspace


(22)
(23)

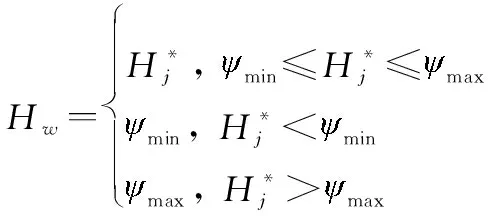
(24)
4 仿真實驗
為驗證模型的合理性,設計仿真實驗,仿真環境為Matlab R2018b。某次截擊作戰中,己方兵力部署為:己方要保衛目標的坐標為(200,320),機場坐標為(400,400),通信設施坐標為(450,350),雷達陣地坐標為(200,320),地面防空火力坐標為(350,300)。我機性能指標為:=1 000 km/h,=45°,=1.5 min,=2 min,=1 min,=1 min,=5 s,=5 s,=20 s,=100 m/s,=150 m/s,Δ=200 m,作戰半徑=1 000 km,我機在警戒巡邏空域中的巡邏航線為“8”字型航線。敵機性能指標為:=800 km/h,敵機所攜帶空對地導彈的最大射程為300 km。敵機為實現襲擊的突然性,最有可能選擇低空或超低空突防,假定敵機的突防高度范圍為100 m到4 000 m。
假設己方通信保障范圍為400 km,地面防空火力打擊范圍為200 km,雷達預警范圍為600 km。在警戒巡邏空域內飛行的我機在預警雷達發現敵機后采取轉彎截擊戰術,在預定截擊點截擊敵機。
在截擊范圍內,敵機從不同的方向進行突擊,對應的威脅評估值如圖11所示。當敵機突擊航線的角度為21°時,對我機構成的威脅最大,因此警戒巡邏空域的長邊應與該威脅值最大敵機突擊航線垂直,即空域的方向為21°。
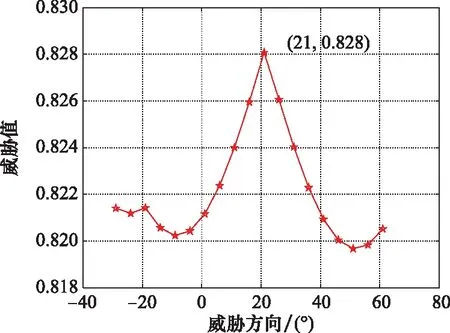
圖11 仿真1中敵機威脅評估Fig.11 Threat assessment of enemy aircraft in simulation 1
仿真1的空域規劃結果如圖12所示,紅色矩形為可規劃空域的位置和數量。在仿真1規定的情景下,截擊線上各預定截擊點到機場的最大距離為262.2 km,小于我機作戰半徑;到己方保衛目標的最小距離為338.3 km,大于敵機空對地導彈最大射程。我機選擇轉彎截擊戰術時,在空域可劃設范圍內只能規劃出1個滿足條件的空域,空域中心點坐標為(521.7,536.2)。
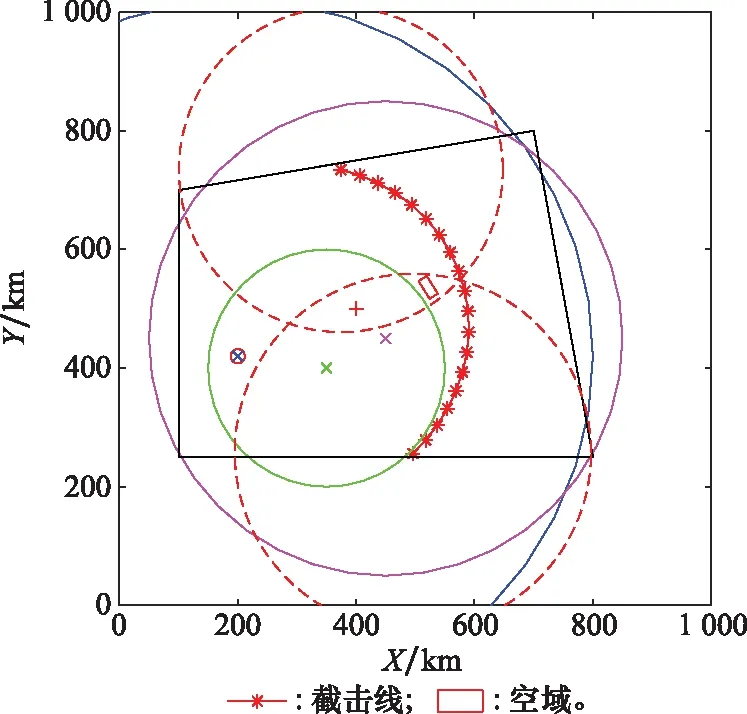
圖12 仿真1空域規劃結果Fig.12 Airspace planning results of simulation 1
我機截擊戰術采取迎頭截擊,其他條件設置與仿真1相同。
仿真2的空域規劃結果如圖13所示。仿真2相較于仿真1,不同點僅在于我機采取的截擊戰術。由于截擊線是以滿足己方機場待戰飛機起飛迎敵的條件來劃設,與在警戒巡邏空域內飛行的空中待戰飛機無關,因此截擊線劃設位置與仿真1相同,由截擊線確定的截擊范圍也相同,敵機的最大威脅突擊航線與仿真1一致,故空域方向、大小、高度范圍均與仿真1相同。在仿真2中,由于采用迎頭截擊,在空域可劃設范圍內能規劃出2個滿足條件的空域,空域中心點坐標分別為(520.9,537.3)、(547.1,544.5)。原因在于相比轉彎截擊,采用迎頭截擊戰術時,我機從警戒巡邏空域到預定截擊點有更長的平飛時間,因此截擊點對應的最大允許距離更大,使得空域的可規劃范圍變大,在空域的可規劃范圍內能夠容納更多的空域。
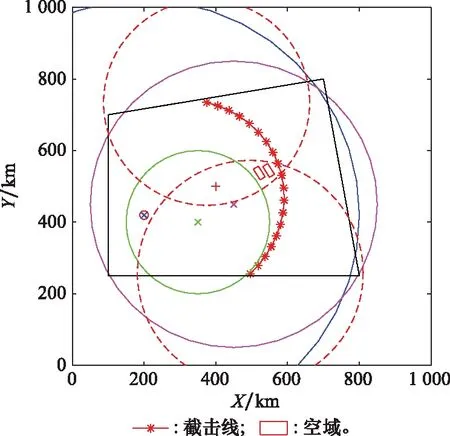
圖13 仿真2空域規劃結果Fig.13 Airspace planning results of simulation 2
假設己方部署更高性能雷達,此時己方雷達的預警范圍提升到700 km,其他條件與仿真1相同。
在該情景下的截擊范圍內,敵機從不同方向進行突擊對應的威脅評估值如圖14所示。敵機突擊航線的角度為-9°時,對我機構成的威脅最大,因此該情景下警戒巡邏空域的方向應為-9°。
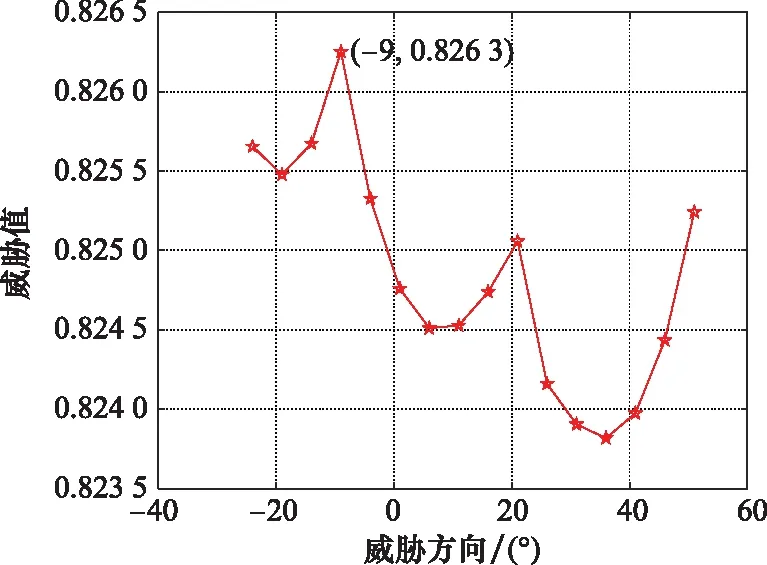
圖14 仿真3中敵機威脅評估Fig.14 Threat assessment of enemy aircraft in simulation 3
仿真3的空域規劃結果如圖15所示。當己方部署更高性能的雷達以獲得更大的預警范圍時,截擊線能夠向敵機來襲方向推進,使己方保衛目標獲得更大的安全范圍。原因在于預警范圍增大時,己方能更早地發現敵機,為己方機場待戰飛機從起飛到接敵贏得更多的時間,當其他時間不變時,我機沿出擊航線平飛的時間增大,使得機場到預定截擊點的距離變大,截擊線前推。此時截擊線上各預定截擊點到機場的最大距離為300.3 km,小于我機作戰半徑;到己方保衛目標的最小距離為407.7 km,大于敵機空對地導彈最大射程。
在空域的可劃設范圍內,能夠規劃出4個警戒巡邏空域,空域中心點分別為(541.4,524.4)、(564.4,527.5)、(587.5,530.8)、(610.7,534.6)。指揮員可以在這4個位置中選擇1個或多個空域供己方空中待戰兵力執行警戒巡邏任務,提高截擊作戰成功率。
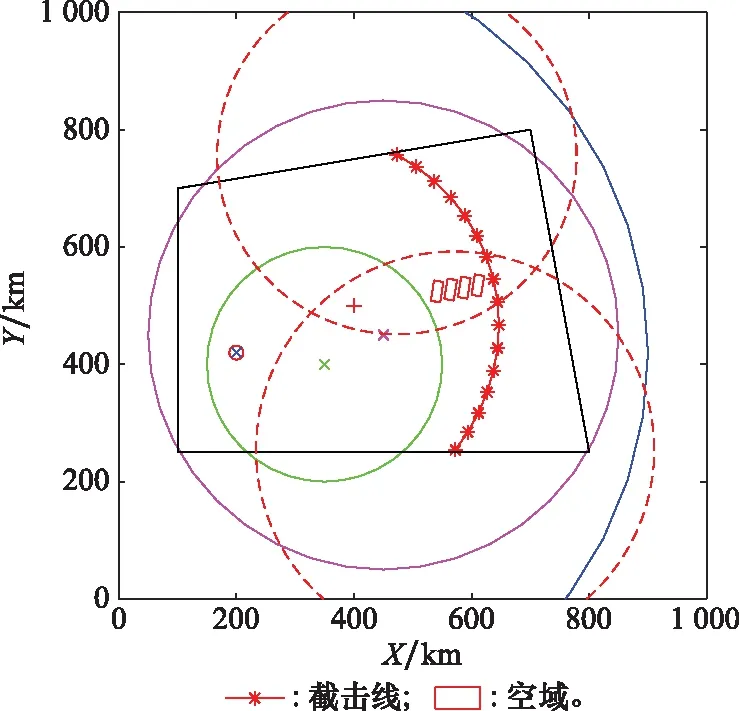
圖15 仿真3空域規劃結果Fig.15 Airspace planning results of simulation 3
考慮到敵方為掩護其突防飛機,可能在我作戰責任區外對己方預警雷達和地面防空火力的制導雷達進行電子干擾。假設在敵方電子干擾下,己方雷達預警距離縮短為500 km,地面防空火力有效殺傷半徑縮短為100 km。
由于敵機空對地導彈最大射程為300 km,以保衛目標為圓心,以300 km為半徑做圓,稱之為敵機導彈威脅圓。在該情景下計算出的部分截擊點到己方保衛目標的距離小于300 km,會威脅到己方保衛目標的安全。因此,距離小于300 km的截擊段用敵機導彈威脅圓代替,最終規劃出的截擊線如圖16所示。在敵方進行電子干擾,己方雷達預警范圍減小的情況下,截擊線后移。從以上仿真結果來看,截擊線的劃設位置主要受己方雷達預警范圍的影響,預警范圍增大時,我機場待戰飛機有更充足的時間到達截擊預定截擊點,使得截擊線能夠前推。

圖16 仿真4截擊線Fig.16 Interception line of simulation 4
此時,分別以截擊線與作戰責任區上下邊界的交點為圓心,以相應的最大允許距離為半徑做圓,兩個圓無相交部分,如圖17(a)所示,無法規劃出能夠保證在整個截擊范圍攔截敵機的空域。此時需要按照第2.5節的方法——平分截擊范圍,將整個截擊范圍分成獨立的兩部分,在兩個獨立的作戰責任分區內分別進行空域規劃。兩個獨立的作戰責任分區內敵機的威脅評估結果如圖18所示。上分區敵機突擊航線的角度為56°時,對己方機場起飛的飛機構成的威脅最大,因此該情景下,上分區警戒巡邏空域的方向應為56°,同理下分區警戒巡邏空域的方向應為-14°。
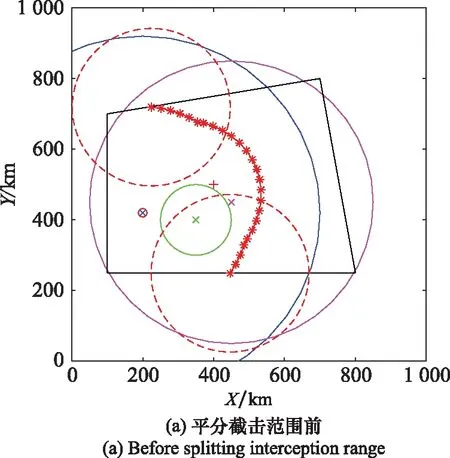
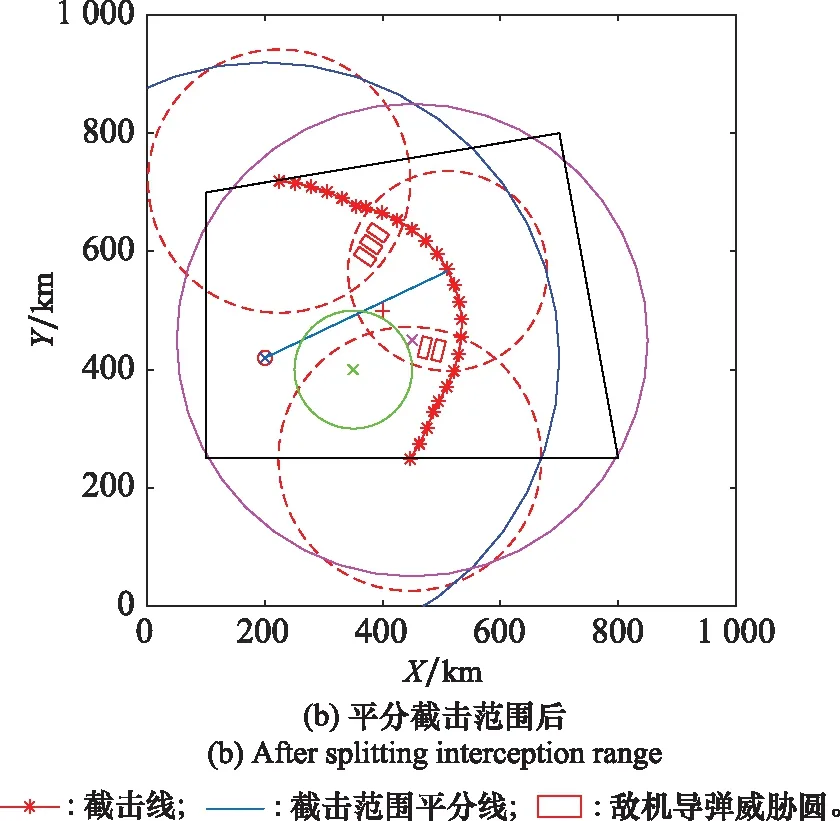
圖17 仿真4的空域規劃結果Fig.17 Airspace planning results of simulation 4

圖18 仿真4中敵機威脅評估Fig.18 Threat assessment of enemy aircraft in simulation 4
仿真4的最終的空域規劃結果如圖17(b)所示。將作戰責任區分為兩個作戰責任分區后,上分區可規劃空域數量為3個,中心點坐標分別為(369.9,591.0)、(380.5,611.5)、(391.6,631.7);下分區可規劃空域的數量為3個,中心點坐標分別為(471.5,437.2)、(494.7,432.3)、(507.0,430.6)。
理論上,在空域可規劃范圍內規劃出的警戒巡邏空域,都能在任一預定截擊點上截擊敵機。為了進一步驗證模型的合理性和有效性,針對上述4個仿真實驗的情景,模擬敵機從不同方向突擊時,在模型假設條件下,驗證我機都能夠成功截擊。設我方所規劃出距離截擊線最遠的警戒巡邏空域中心點為′,我機從′點到各個預定截擊點所需的飛行時間為,敵機沿不同航線突擊時,從被我方雷達發現點到各個預定截擊點的飛行時間為。若不論敵機從任一方向突擊,都有<,則能保證在警戒巡邏空域中的我方飛機都能夠有充足的時間到達截擊點,實現對敵機的成功截擊。上述4個仿真情景中,和的關系如圖19所示,可以看出,敵機從各個方向突擊時,都小于,驗證了模型的合理性。
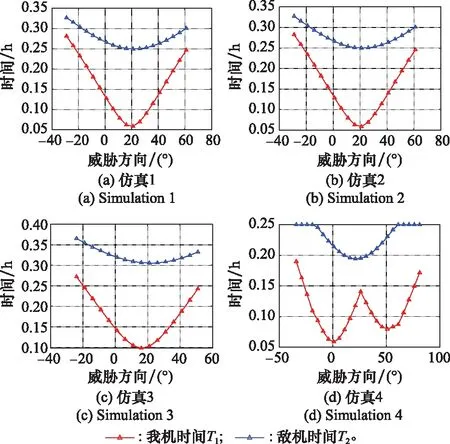
圖19 T1和T2的比較Fig.19 Comparison of T1 and T2
仿真1到仿真4中,由于我機在警戒巡邏空域中的巡邏航線為“8”字型航線,故空域長邊=35.2 km,短邊=16.2 km。根據敵機的可能突防高度范圍100~4 000 m,按照第3節的方法計算出空域的高度范圍為0~7 950 m,進而完成完整的警戒巡邏空域規劃。
5 結 論
警戒巡邏是典型的空中戰斗活動之一,實施防御性制空截擊作戰時必須規劃好警戒巡邏空域。本文立足任務空域規劃實際,構建了完整的警戒巡邏空域規劃模型,著重解決了以往警戒巡邏空域規劃過程中受指揮員和空域規劃人員主觀因素影響大、空域規劃科學性差、影響作戰性能發揮等問題,得到的主要結論如下:
(1) 綜合考慮我方兵力部署和敵機威脅,結合截擊作戰中我機從起飛到截擊的整個流程,確定出截擊線的位置,使截擊線的設置更加合理可信。
(2) 評估敵機不同突擊航線的威脅值,威脅值最大的方向即為警戒巡邏空域的方向,方向設置更有利于我方目標的安全。
(3) 在滿足空域設置約束條件的前提下,根據我機采取的截擊戰術,明確了空域的可劃設范圍,在此范圍內規劃出空域的位置和數量,避免了規劃過程中的盲目性,同時能夠保證截擊任務的完成。
(4) 考慮敵機可能的突擊高度上下限,結合我機性能指標,確定出警戒巡邏空域的高度范圍,進而建立了完整的警戒巡邏空域規劃模型。模型靈活高效、可實施性強,對空域規劃人員科學合理規劃出警戒巡邏空域具有一定的借鑒意義。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
