高速飛行器變質心控制技術綜述
2022-05-12 05:19:50周鳳岐郭建國
宇航學報 2022年3期
關鍵詞:質量
周 敏,周鳳岐,周 軍,郭建國
(西北工業大學精確制導與控制研究所,西安 710072)
0 引 言
變質心控制是指通過主動改變飛行器質心位置,產生期望控制效應的一種新概念控制手段。飛行器質心位置變化可通過移動機體部分結構或部件來實現。根據可動結構或部件選取方式不同,變質心有以下兩種實現方式:
1)可動結構或部件位于飛行器機體外部。例如,設計飛行器外露升力面為可動結構,能夠通過平動或轉動運動使飛行器系統質心位置發生變化。該方式下飛行器氣動外形隨之變化,是一種變外形的實現方式。
2)可動結構或部件位于飛行器機體內部。例如,設計飛行器內部配置的電源系統為可動部件,電源移動時飛行器內部質量分布特性變化,系統質心位置發生變化。該方式下飛行器氣動外形保持不變,僅內部布局發生變化。
高速飛行器的變質心控制應采用方式2)實現,相比于氣動舵、側噴發動機等傳統控制手段具有明顯優勢,主要體現在以下方面:
1)變質心控制機構完全位于高速飛行器內部,有利于保持飛行器良好氣動外形,實現有效減阻,獲得更好的升阻特性;
2)實現變質心控制無需配置外露執行機構,避免了熱燒蝕、側向噴流干擾、氣動舵面顫振和大動壓時鉸鏈力矩過大等問題;
3)利用氣動力實現變質心控制時,作動面為整個飛行器機體,控制效率更高,且無燃料消耗,效費比更高。
國外很早就開始了高速飛行器變質心控制技術研究。其中,俄羅斯和美國已實現變質心控制工程應用:俄羅斯的“SS-18”和“SS-27”洲際彈道導彈通過移動戰斗部實現質心變化,完成彈頭機動控制;美國“三叉戟I”洲際彈道導彈攜帶的MK-500機動彈頭通過移動電子裝置實現變質心控制。但是美俄變質心技術研究的詳細情況一直處于高度保密狀態,可參考的公開文獻較少。
國內針對高速飛行器變質心控制的研究起步較晚,但發展迅速。1993年,西北工業大學精確制導與控制研究所的周鳳岐教授在國內率先提出并開展了變質心技術研究,其團隊針對變質心控制機理、控制模式、控制方法以及執行機構研制等內容開展了系統性的深入研究,發表了國內該領域最早的一批學術論文,并于2004年、2006年分別研制完成了國內首臺一維變質心機構原理樣機和首臺二維變質心機構原理樣機,在研制過程中搭建了變質心機構性能測試實驗系統。另外,哈爾濱工業大學、北京理工大學等機構的學者也對變質心飛行器動力學、制導控制等進行了研究。
本文圍繞高速飛行器變質心控制展開綜述,對變質心技術應用于高速飛行器實現不同控制模式的基本原理進行梳理和闡述,分析高速飛行器變質心控制面臨的關鍵問題,并結合未來高速飛行器任務特點和控制需求,提出具有潛力的四個方向的研究建議,為今后變質心技術發展提供思路。
1 變質心控制原理
高速飛行器機體內部可動質量塊移動使得系統質心位置在一定范圍內變化,過程如圖1所示。基于該質心變化效應,根據不同原理可實現三種高速飛行器變質心控制模式,分別是:附加慣量消旋模式、質量矩姿控模式和操穩性能調控模式。
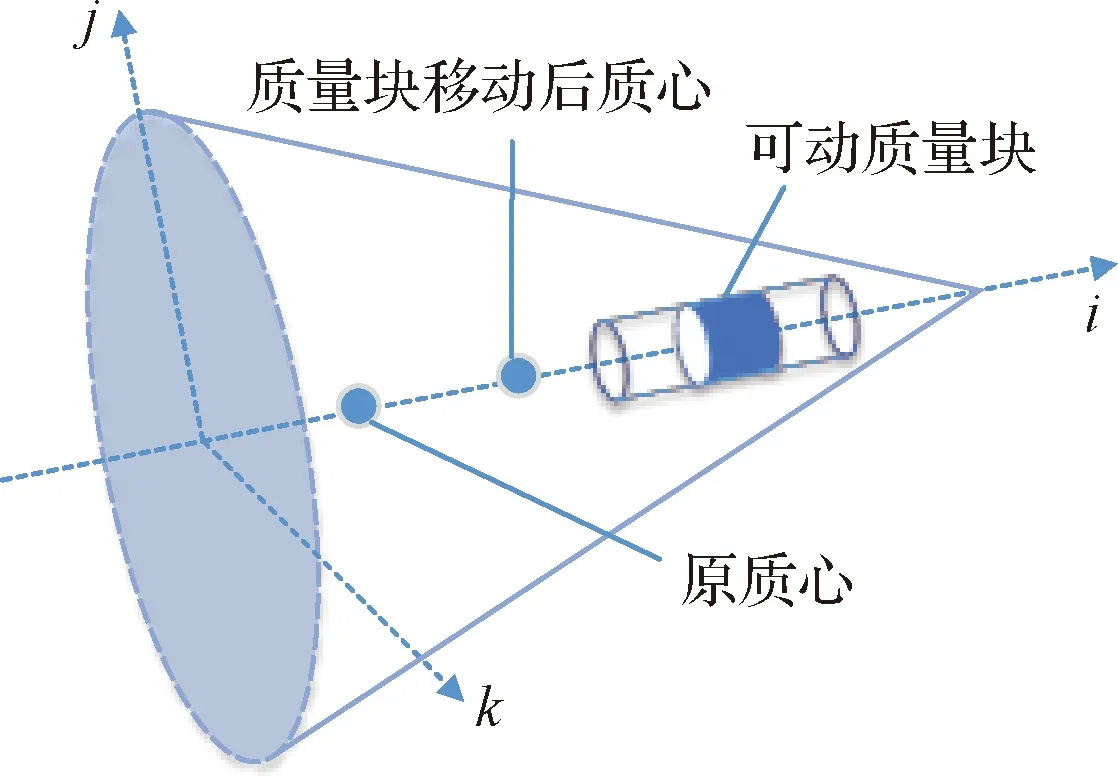
圖1 內部質量塊運動實現變質心示意圖Fig.1 Moving mass control with internal movable masses
1)附加慣量消旋模式
20世紀70年代,Murphy等最早研究了彈丸內部無控活動質量塊對運動特性的影響,發現質量塊運動會改變彈丸角運動。基于此發現,變質心首先被作為一種實現消旋的簡單手段應用在自旋飛行器控制中:John等采用如圖2所示的兩種內部質量塊配置方案主動衰減自旋航天器的圓錐運動,實現航天器消旋;相似裝置也被用于自旋火箭以保證飛行穩定。
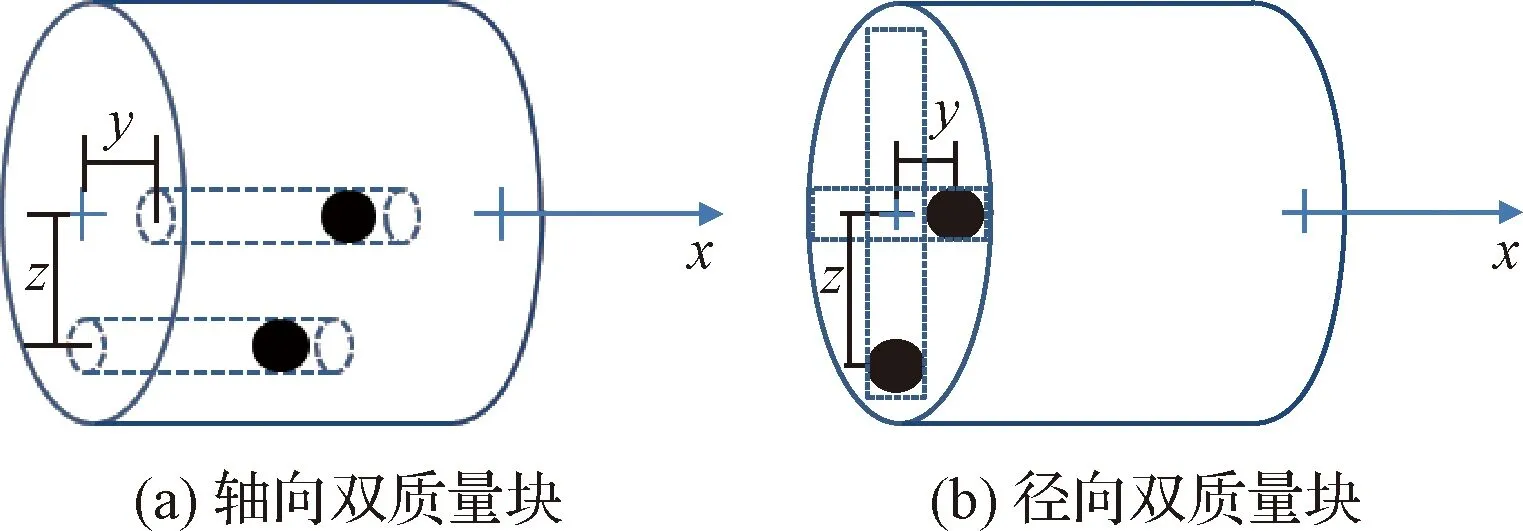
圖2 消旋模式的質量塊配置Fig.2 Masses configuration of despin control
在國內,周鳳岐教授也利用類似方法通過主動控制彈體內部兩個活動質量塊運動以減小章動角,克服了旋轉導彈的螺旋運動,有效提高了旋轉導彈的命中精度,這是國內應用變質心技術成功解決實際工程問題的最早范例。
可見,變質心附加慣量消旋模式的控制原理是:通過主動控制機體內部質量塊移動改變飛行器慣量特性,使慣性主軸發生偏移,產生期望附加慣量與飛行器角運動耦合,實現飛行器消旋。
2)質量矩姿控模式
2000年,美國陸軍空間與導彈防御司令部提出要研究一種用于導彈防御的新概念動能攔截彈——“質量矩攔截器”,結構設想如圖3所示,其核心思想是:改變攔截器質心位置,使之偏離氣動力作用壓心,即可依賴質量形成力矩作用迅速改變攔截器姿態。質量矩攔截器提出的正是變質心技術能夠實現的第二種控制模式——質量矩姿控模式。
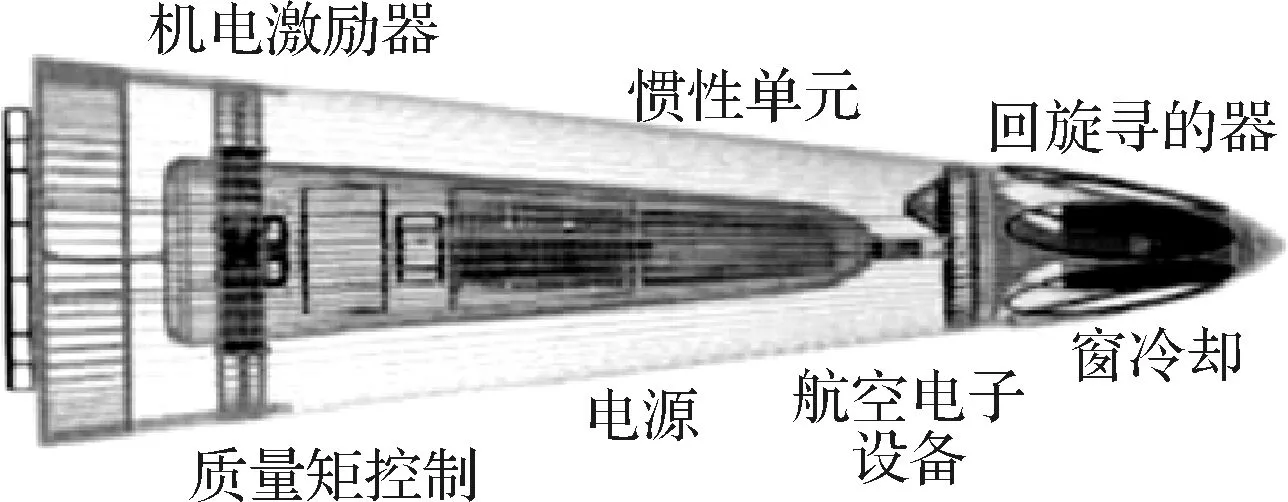
圖3 質量矩攔截器結構設想圖Fig.3 Configuration of mass moment interceptor
飛行器姿態控制依賴于需用控制力矩的持續獲取,而控制力矩由力臂矢量與力矢量叉乘確定。因此,飛行器姿態控制可通過調節控制力矢量或調節控制力臂矢量兩種途徑得以實現。傳統的氣動舵、發動機推力控制均通過調節控制力矢量獲取需用控制力矩,變質心控制則通過調節力臂矢量實現。
變質心質量矩姿控模式的控制原理是:利用機體內部質量塊移動改變系統質心位置,使氣動力、發動機推力等外力的作用力臂變化,從而產生期望控制力矩,實現飛行器姿態控制。
需要特別強調的是,質量矩姿控模式可適用于更多場景,包括:以氣動力為外力的大氣層內飛行控制;以發動機推力等為外力的大氣層外飛行控制。因此,質量矩姿控成為研究最深入、應用對象最豐富的變質心控制模式。
3)操穩性能調控模式
變質心控制應用于大氣層內飛行器時,還可以實現另外一種控制模式,即對飛行器操穩性能進行調控。如Rogers和Costello利用如圖4所示配置的質量塊改變系統質心位置,調整與氣動壓心之間的相對位置,從而實現飛行器靜穩定度主動調控,保證炮彈在不同飛行階段的操穩性能需求:發射初期質量塊向彈體頭部方向移動,使炮彈具有較高靜穩定度,保證發射初期多種誤差干擾條件下的炮彈穩定性;隨后,質量塊向彈體尾部移動,降低靜穩定度,增加機動能力以擴大打擊范圍。
圖4 操穩性能調控模式的質量塊配置Fig.4 Masses configuration of stability regulation
操穩性能調控模式下飛行器能夠按需改變其操穩性能,提高各飛行階段的軌跡/姿態控制效能。可見,變質心操穩性能調控模式是在傳統軌跡/姿態控制器基礎上增加的飛行器特性優化環節,如圖5所示,其設計獨立于軌跡/姿態控制器設計。

圖5 變質心操穩性能調控模式作用方式Fig.5 The effect of moving mass stability regulation
變質心操穩性能調控模式的控制原理是:利用機體內部質量塊移動主動調節飛行器質心,改變質心和氣動壓心的相對位置,調節大氣層內飛行器的重壓心距,即靜穩定度大小,實現大氣層內飛行器操穩性能調控。
隨著高速飛行器應用領域不斷擴大,大空域、寬速域、強機動等大包絡飛行需求成為未來高速飛行任務的典型特征。變質心操穩性能調控模式作為一種原理簡單卻十分有效的飛行器特性優化途徑,能夠應對大包絡飛行下的操穩性能大范圍變化需求,在未來高速飛行器發展中發揮重要作用。
2 關鍵問題
國內外學者針對變質心控制技術在再入飛行器、制導彈藥、火星探測器、小型航天器、低空無人機等高速飛行器中的應用開展了大量研究,主要涉及四個方面的關鍵問題:動力學建模問題、制導控制問題、執行機構設計研制問題以及系統仿真與評估問題。
2.1 變質心多體動力學建模
飛行器動力學建模是開展制導控制系統設計、實現飛行任務的前提和基礎。變質心飛行器由內部可動質量塊與飛行器本體兩部分構成,在忽略飛行器機體撓性變形的前提下屬于多剛體范疇,其繞心運動具有強耦合、嚴重非線性特性,質心平動也受到繞心運動的耦合影響。這與傳統單剛體飛行器的質心平動、繞心運動相互獨立明顯不同,其動力學模型相對復雜,具體表現在:
1)繞心運動受到內部質量塊運動產生的慣性力矩影響,其大小由質量塊相對于飛行器本體運動的位移、速度、加速度以及轉動角度、角速度決定;
2)繞心運動受到內部質量塊運動產生的附加轉動慣量影響,其大小與質量塊質量以及質量塊相對于飛行器本體平動位移相關;
3)繞心運動受到內部質量塊運動產生的耦合控制力矩影響,其大小由飛行器所受外力、質量塊相對于飛行器本體的質量比以及位移決定;
4)質心平動受到內部質量塊運動產生的慣性力影響,其大小不僅與質量塊相對于飛行器本體運動的位移、速度、加速度相關,還與飛行器自身轉動角速度相關,即質心平動和繞心運動耦合。
隨著高速飛行任務需求不斷提高,特殊構型高速飛行器成為研究熱點。以典型的乘波體氣動布局高超聲速飛行器為例,機體氣動彈性變形和氣動熱燒蝕十分顯著,忽略飛行器機體撓性變形的前提不再成立,引入變質心控制的乘波體高超聲速飛行器具有多剛體/彈性體耦合系統動力學特征,其建模過程和模型特性都將更加復雜。
當前研究工作主要針對多剛體變質心飛行器模型建立方法與動力學特性展開。模型建立方法包括整體法和分離法兩種:整體法將可動質量塊與飛行器機體之間的相互作用作為系統內力處理,分離法則需明確該作用力的具體表達式。兩種方法均可依據牛頓經典力學的動量/動量矩定理或者分析力學的拉格朗日/凱恩方程等推導動力學模型。針對多剛體變質心飛行器,研究人員分析了時域/頻域動力學特性,并結合其耦合、非線性、分岔等特性,實現了面向控制的模型簡化,為經典控制理論在變質心飛行器上的應用奠定了基礎。
因此,針對不同結構特點的多體變質心飛行器建立通用全量數學模型、基于特性提煉模型簡化準則、并實現面向控制的模型簡化是變質心飛行器多體復雜動力學建模問題的主要研究內容。
2.2 變質心飛行器制導控制
變質心飛行器制導控制具體包括軌跡與制導問題、復雜姿態控制問題兩個方面。
1)軌跡與制導問題
采用不同控制策略的變質心飛行器,飛行模式不同,軌跡與制導實現的已知條件也不同,需要依據具體控制策略和控制特性進行軌跡與制導設計。
例如,基于變質心滾轉控制,固定配平型飛行器能夠實現BTT(Bank-to-turn)飛行模式,但其只有過載方向可控而過載大小不可控,應用已有制導方法時出現過載多余或不足的問題,難以實現既定目標。為此,20世紀80年代以來,相關學者開展了大量針對性研究。
例如,依賴變質心俯仰/偏航配平控制,快速自旋飛行器能夠實現STT(Side-to-turn)飛行模式,但其縱向運動與側向運動存在嚴重耦合,這就導致傳統縱/側平面分離的制導設計思路不再適用,需要專門研究適用于快速自旋飛行器的三維軌跡規劃與制導方法。
2)復雜姿態控制問題
變質心高速飛行器姿態運動具有嚴重非線性、強耦合特性,由此產生的復雜控制難題是變質心技術應用面臨的核心問題,主要包括:欠驅動控制、抗飽和控制和強耦合控制。
欠驅動控制。受飛行器內部空間約束和總體布局限制,基于變質心方式實現高速飛行器姿態控制通常存在欠驅動特性——控制輸入個數少于系統的自由度。例如,變質心滾轉控制只能實現滾轉姿態控制,變質心配平控制只能實現俯仰和偏航姿態控制。采用變質心實現高速飛行器三通道姿態控制屬于典型的欠驅動系統控制問題。目前,解決變質心欠驅動控制問題的基本思路主要有兩種:(1)利用先進的欠驅動系統控制理論和方法,如文獻[67]研究一種基于無源化的欠驅動系統控制方法,基本思想是實現系統能量的重新分配;(2)開展變質心與其他手段的復合控制,如文獻[68]引入直接力實現變質心/直接力復合控制。
抗飽和控制。飛行器內部空間限制導致可動質量塊移動范圍受限;變質心伺服機構動態性能和結構性能限制了可動質量塊最大移動速度和加速度;另外,可動質量塊速度、加速度越大,產生的慣性力(矩)干擾越大。因此,變質心控制方式下,可動質量塊位移、速度、加速度均受到嚴格約束,變質心控制存在輸入飽和、狀態飽和問題,需要開展變質心飛行器抗飽和控制方法研究。
強耦合控制。變質心高速飛行器動力學存在著嚴重的通道間耦合,實現通道間解耦的非交互控制是當前變質心飛行器強耦合控制問題的主要解決思路。另外,變質心飛行器的耦合特性還突出體現在控制增益與飛行狀態之間的強耦合。例如,利用軸向質量塊運動和法向氣動力產生俯仰控制作用時,控制增益大小和方向與當前飛行攻角密切相關。因此,控制增益不確定的非線性系統控制方法是解決變質心強耦合控制問題的關鍵。
2.3 變質心高性能執行機構
執行機構設計與研制是變質心控制技術工程化應用的重要環節。變質心執行機構技術需要解決兩大問題:1)執行機構總體配置問題,2)高性能伺服控制問題。
變質心執行機構總體配置是指在飛行器總體布局約束下,合理設計變質心執行機構的結構參數,使可動部分質量、移動范圍等滿足系統控制能力要求,使不可動部分的導軌及其他支撐部件等滿足剛度、強度等結構性能指標。為此,變質心執行機構總體配置應遵循以下基本原則:
1)盡可能利用飛行器內部已有結構作為執行機構可動部分,降低系統總質量,增大可動質量比,提高控制能力。例如,利用戰斗部等已有部件作為可動質量塊,有效提高變質心俯仰控制能力。
2)合理設計可動質量塊運動形式,避免多個可動質量塊的運動干涉。例如,單個可動質量塊沿徑向導軌移動,該導軌繞飛行器縱軸旋轉,避免二維變質心采用兩質量塊正交配置的運動干涉問題。
3)合理設計可動質量塊質量特性、移動行程和控制維數等,盡可能降低控制耦合干擾,保證變質心控制能力需求。文獻[80]就對質量塊移動產生的附加擾動力矩以及耦合干擾進行了定量分析,提出可降低通道間耦合和附加擾動作用的機構配置方法。
為變質心執行機構設計高性能伺服控制系統是利用變質心技術實現高速飛行器姿態控制的關鍵。高速飛行器具有超高速、高動態、高過載飛行等特點,用于實現高速飛行器姿態控制的變質心執行機構不僅要滿足控制能力大小需求,更要滿足嚴苛的動態特性需求,包括:快響應、高動態、大功率、高效率、抗高過載能力等。因此,研究高精度、快響應、強魯棒控制算法是解決變質心高性能伺服控制問題的主要途徑。
2.4 變質心飛行器系統仿真與評估
變質心作為一種新概念控制手段,特性復雜、工程化難度高,引入仿真與評估技術對于提高變質心飛行器系統性能、縮短研制周期、降低研制成本具有重要意義。系統仿真與評估工作主要包括四個方面:仿真平臺與可視化演示系統構建、高置信度精細化仿真模型設計、系統性能指標提取與指標體系建立、性能評估通用方法研究。
面向變質心高速飛行器的仿真平臺與可視化演示系統應具有通用化、模塊化、可拓展等特性,能夠結合仿真對象具體需求實現仿真評估算例快速搭建,完成仿真條件快速配置,實現純數學仿真或半物理仿真,從而具備變質心執行機構、導引頭等分系統性能分析評估的能力。例如,文獻[81]就基于LabVIEW設計了變質心執行機構性能分析與可視化演示系統,通過與研制的變質心控制機構樣機互聯,實時分析評估機構性能。
高置信度精細化仿真模型是變質心高速飛行器仿真與評估的核心。以數學仿真為例,建立的變質心高速飛行器高置信度數學模型應包括:風場、重力場等高保真環境模型;氣動模型、通用動力學模型、伺服機構模型等變質心飛行器模型;軌跡規劃、制導系統、控制系統等算法模型。
性能指標及指標體系是實現變質心高速飛行器仿真評估的重要工具,為提升系統性能提供依據。建立的評估指標體系應兼顧多層次系統性能評價需求,包括:執行機構、傳感器等部件級評估指標;飛行器全量/簡化模型置信度評估指標;導航/制導/控制等算法級評估指標;基于數學仿真/地面試驗/飛行試驗多源數據的評估指標;復雜動態戰場環境下的作戰效能指標等。
采用有效的性能評估方法給出變質心高速飛行器系統性能綜合評價與優化建議是開展系統仿真評估的最終目的。選取評估方法時,應充分考慮評估對象特點和系統優化方向,常用方法有層次分析法、灰關系評估法、模糊綜合評估法、主成分分析法、熵值法等。
3 研究方向展望
高速飛行器飛行特性復雜,應用場景日益多樣化,進一步提高控制效率、提升控制性能成為變質心技術應用于高速飛行器研究的重要任務。一方面,需要深入挖掘適用于變質心控制的新模式、新理論;另一方面,開展關鍵問題之間的橫向融合與匹配研究有望進一步發揮變質心控制優勢和特點。為此,提出以下四個方向的研究建議。
3.1 變質心多模式復合控制
變質心復合控制能夠充分發揮不同控制手段的優勢和特點,有效提升飛行控制能力和控制性能,得到了相關學者的關注。例如,Wei等利用變質心/直接力復合實現了滾轉和偏航通道控制,解決了縱向單可動質量塊欠驅動控制問題;王霄婷等研究了變質心/直接力在不同飛行高度的串行復合控制,解決了高空稀薄大氣條件下無有效氣動力可用、低空稠密大氣條件下側噴擾流嚴重等問題,實現了高速飛行器大空域飛行。
除了不同控制手段復合,本文在此提出一種新的適用于變質心的復合控制策略——變質心多模式復合,即附加慣量消旋模式、質量矩姿控模式、操穩性能調控模式的復合。以質量矩姿控/操穩性能調控模式復合為例,依據飛行高度變化動態調整高速飛行器穩定度大小,應對高空/低空操控能力大范圍變化,提高不同高度上的質量矩姿控模式的控制性能,有效兼顧了高空/低空不同機動任務需求。同理,該復合策略也能夠解決高速飛行器橫向大機動、快速下壓、平穩巡航等不同飛行彈道轉換下的操控性能變化需求。
變質心不同控制模式有快慢模態之分:附加慣量消旋、質量矩姿控模式屬于快模態,操穩性能調控模式屬于慢模態。因此,變質心多模式復合包含了多模態復合,實現變質心多模式高性能復合控制就必須解決復雜、強耦合、多變量非線性系統多模態高效復合控制問題。
3.2 變質心智能控制算法
變質心高速飛行器多體動力學具有強非線性、強耦合、快時變、強不確定等復雜特性,其控制還面臨欠驅動、狀態/輸入飽和、強耦合等挑戰,一般控制算法處理難度大。智能控制具有在線學習、自適應、推理決策等能力,能夠大大降低控制對于對象模型的依賴,因此,引入智能控制算法實現變質心高速飛行器的高性能控制是未來的研究熱點。
在變質心高速飛行器智能控制方面可能取得突破的方法有智能自適應控制、神經網絡控制、模糊控制、專家控制等。例如,吳宏鑫院士經過航天控制領域多年研究實踐,提出基于特征模型的智能自適應控制,結合對象動力學特征、環境特征和控制性能要求建立特征模型,然后將智能控制和自適應控制結合實現復雜系統智能自主控制,該方法在飛船再入返回自適應控制等眾多復雜系統中得到應用和驗證,未來有望研究應用于變質心高速飛行器,解決其復雜高性能控制問題。
3.3 變質心總體隨控優化設計
總體布局是確定變質心飛行器控制模式、控制策略、控制維數、控制能力等具體實現方式與控制性能的前提,也決定了變質心多體動力學模型的復雜程度,因此,變質心飛行器總體對控制效能的影響十分顯著,開展面向控制的總體優化設計,實現總體與控制匹配協調是提高變質心高速飛行器控制性能的有效途徑。
作者及所在團隊針對高速飛行器提出以控制系統期望性能為優化指標的總體隨控性設計思想,打破了傳統設計中總體與控制順序進行、控制獨立于總體、總體設計后不管的模式,基于建立的控制性能總體參數表征模型,實現了降低高速飛行器控制耦合、控制非線性的總體設計方案。
變質心高速飛行器多體動力學特性使得總體與控制的關聯性更為復雜,將總體隨控優化設計思想應用于變質心高速飛行器以實現變質心總體布局與控制閉環匹配和二者協調統一尚需進一步研究。如圖6所示,需要基于變質心高速飛行器總體布局的動力學特性表征模型,實現面向控制的總體優化設計,最終提高變質心控制效能。

圖6 變質心飛行器隨控優化設計示意圖Fig.6 The control-configured optimization principle for moving mass vehicles
3.4 制導/控制/伺服一體化設計
變質心高速飛行器的軌跡和姿態運動存在嚴重耦合。一方面,在超高速、強機動飛行條件下,飛行器制導控制分離設計條件難以滿足;另一方面,由變質心高速飛行器動力學特性已知其質點平動受到剛體轉動角速度的影響,即軌跡運動受到姿態運動的耦合干擾。因此,針對變質心高速飛行器開展制導/控制一體化設計十分必要。
此外,由變質心高速飛行器動力學特性可知,變質心執行機構除了為姿態控制提供所需控制力矩作用外,還給飛行器軌跡運動、姿態運動引入了復雜的慣性力和慣性力矩擾動。而高速飛行器實時飛行狀態也決定了變質心機構伺服系統所處的工作過載、工作溫度等,影響伺服系統帶寬、上升時間、精度等實時控制性能。可見,變質心機構伺服系統與高速飛行器機體之間也存在嚴重耦合。因此,在制導/控制一體化的基礎上,進一步考慮伺服系統,開展針對變質心高速飛行器制導/控制/伺服一體化設計研究,對于提高變質心執行機構性能,改善高速飛行器控制效能具有重要意義。
4 結束語
變質心控制模式多樣、控制效率高、效費比高,優勢十分明顯,是實現未來高速飛行器大空域、大機動、高精度等復雜飛行任務的有效手段。為此,針對其多體動力學特性、強耦合欠驅動非線性控制、高性能執行機構等關鍵技術問題,本文指出未來最具價值的四個研究方向,將有助于推動變質心技術在高速飛行器上的工程化應用。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54