塔式太陽能熱發電站用定日鏡研究
2022-05-12 09:41:32王金偉褚俊
機電工程技術 2022年4期
郭 慶,方 超,王金偉,褚俊
(揚州電力設備修造廠有限公司,江蘇揚州 225003)
0 引言
能源關系著國家經濟發展和社會穩定,積極發展可再生能源利用技術能夠改變能源結構,以適應新一輪科技革命和產業結構的內在需求[1]。太陽能熱發電是利用大規模太陽鏡場將太陽能聚集起來,產生高溫蒸汽驅動汽輪機發電的技術,主要分為槽式太陽能熱發電、塔式太陽能熱發電、線性菲涅爾式太陽能熱發電、碟式太陽能熱發電[2-5]。與光伏發電相比,光熱發電不必使用昂貴且效率較低的硅晶體光伏電池,成本更低,轉換效率更高[6]。因此這種形式的太陽能利用具有光伏發電無法比擬的優勢。2016年國家能源局發布了《國家能源局關于組織太陽能熱發電示范項目建設的通知》,確定了第一批示范項目名單,示范項目共20個,總裝機容量1 349 MW,塔式太陽能熱發電、線性菲涅爾式太陽能熱發電、槽式太陽能熱發電各占據685 MW、200 MW、464 MW。
由于塔式太陽能熱發電系統綜合效率高,更適合于大規模、大容量商業化應用,未來塔式太陽能熱發電技術可能是光熱發電的主要技術流派。定日鏡是塔式太陽能熱發電系統的核心設備,數量龐大,在整個系統中所占的成本比例較高,重要性不言而喻[7-10]。研發適用我國氣候環境的定日鏡對推進塔式示范電站建設具有重要意義。楊琛等[11]提出了一種三軸支撐的定日鏡裝置,能夠提高定日鏡裝置面對極端天氣時的穩定性。本文針對塔式太陽能熱發電系統研制了一種YX-DRJ20-8定日鏡。
1 建立模型
1.1 定日鏡構成及參數
定日鏡是將太陽或其他天體的光線反射到固定方向的光學裝置[12-13]。YX-DRJ20-8定日鏡采用水平加俯仰的跟蹤方式跟蹤太陽,其主要由控制系統、傳動機構、支撐結構、反射鏡面等構成,如圖1所示。傳動機構包括方位旋轉驅動機構和俯仰旋轉驅動機構,實現雙軸跟蹤。主要技術參數如下:
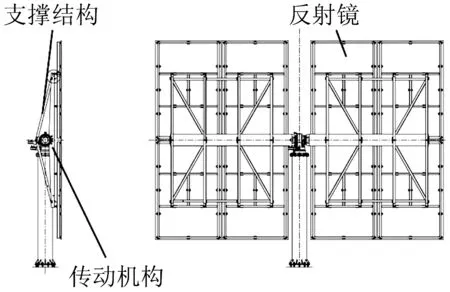
圖1 定日鏡結構
型號:YX-DRJ20-8;
結構形式:高度角-方位角雙軸跟蹤;
尺寸:20 m2;
精度:高于3.5 mrad;
反射率(25年壽命期內):第一年反射率大于95%,5年內大于92%;
抗風能力:13 m/s風速能夠正常工作。
1.2 總體方案及功能
定日鏡采用水平加俯仰的跟蹤方式跟蹤太陽,圖1所示。定日鏡反射面由4塊2 440 mm×1 830 mm的單元反射鏡拼裝而成,反射面總面積為17.86 m2。反射面之間存在一個大于定日鏡立柱直徑的間隙,這個間隙可以保證反射面在定日鏡不工作時能實現倒扣而不使反射面與立柱發生碰撞。反射面倒扣可以減少灰塵在反射面上的集聚。
定日鏡系統運行模式及功能主要有手動模式、自動模式、其他控制模式。
在手動運行模式下可依據設置在柜內的手動操作按鈕完成方位正反轉、俯仰正反轉控制,手動控制模式下電機轉速為3 000 r/min。
在自動模式下,本地控制系統可實現自動歸位、自動跟蹤、夜間保護、大風保護4種工作模式。
自動歸位:控制系統要實現精確地定位并消除由運行過程中產生的累計誤差,需要由原點信號并通過控制系統的原點查找功能實現,在控制系統中,歸位功能即原點信號查找自動歸位在系統重新上電、系統開始自動跟蹤兩種情況下被執行,執行的目的為清空控制器程序中實際位置計數器,通過理論計算位置來精確控制定日鏡的實際運行。
自動跟蹤:系統歸位結束且已高速運行至指定位置時,系統轉入自動跟蹤運行,在自動跟蹤運行時,采用后30 s太陽法線位置和當前實際法線位置的差值確定定日鏡的自動跟蹤速度以達到精確跟蹤控制。
夜間保護:太陽高度角小于指定高度后,系統恢復至初始位置即鏡面平置以避免夜間意外損壞,切斷電源以節省電能并縮短下一個自動跟蹤周期內的歸位速度,實現快速響應。
其他控制模式是根據鏡場上位控制指令要求進行動作,如分組啟動、運行至準備好的位置等。
1.3 控制系統
控制系統采用方位、俯仰雙軸驅動的方式控制定日鏡自動跟蹤太陽運行,主要通過控制定日鏡將不同時刻的太陽光線聚焦后反射至固定目標位置,因太陽的高度角和方位角時刻變化,意味著定日鏡入射光線的高度角和方位角也在不斷變化,而最終目標點位置是固定不變,由此可以根據太陽高度、方位角度計算出定日鏡法線位置從而實現精確定位。
定日鏡控制器與外接的帶光電編碼器的無刷電機構成一個獨立的閉環系統,控制電機的運行分為水平和俯仰兩臺電機。水平和俯仰各帶有左右限位和零點檢測開關,能夠對電機位置進行檢測和限制。同時帶有以太網傳輸模塊,實現Modbus-TCP通訊,實現多個系統之間的整體協調控制。另外控制板還帶有高精度的RTC芯片,能夠獲得精確的時間,完成天文公式太陽角度的本地計算。控制器上的EEPROM存儲器用于儲存一些本地參數,保證掉電后不丟失。控制板自帶溫度傳感器,對控制板所在的環境溫度進行監測,出現過熱情況時進行相應的報警和保護。
控制系統中的定日鏡控制器采用SPA算法,計算出定日鏡調整角度的理論值,結合SCS系統的調整目標、定日鏡實際位置計算定日鏡動作范圍,通過驅動高度角或方位角電機進行相應位置的移動,調整定日鏡鏡面位置使太陽反射光斑精度符合系統要求,控制原理如圖2所示。
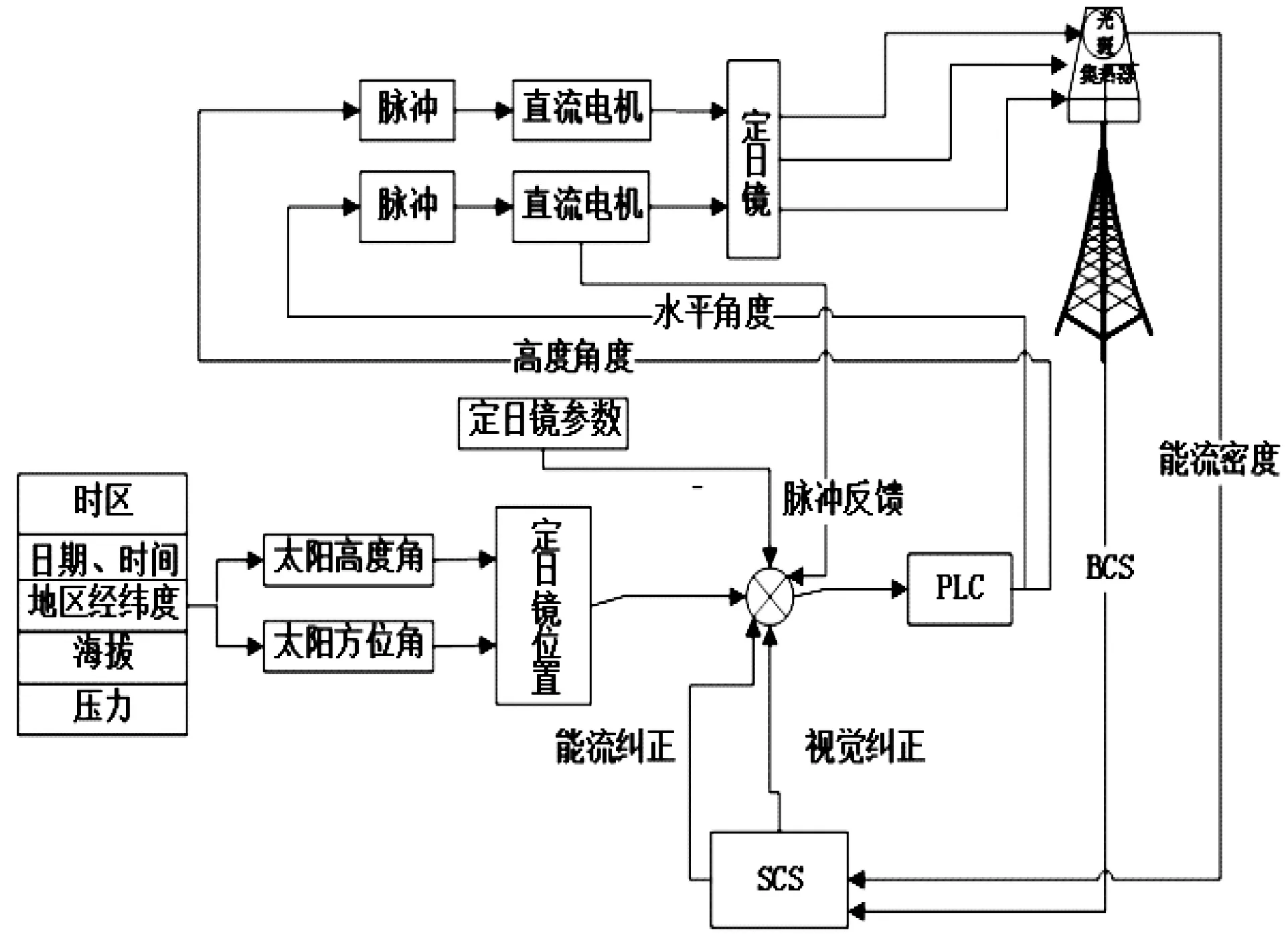
圖2 控制原理
1.4 傳動機構
傳動機構是定日鏡的核心部件,安裝在立柱的頂部,其主要由直流電機、行星減速機、定日鏡傳動箱構成。設計的傳動機構包括方位旋轉驅動機構和俯仰旋轉驅動機構,實現雙軸跟蹤。方位和俯仰運動為獨立、單獨驅動,方位和仰角運動的傳動鏈均為電機、行星減速機、蝸輪蝸桿傳動、擺線針輪行星傳動。擺線針輪行星傳動分別位于各自的箱體內,兩部分獨立于箱體上部和下部,共同構成傳動箱,傳動機構如圖3所示。
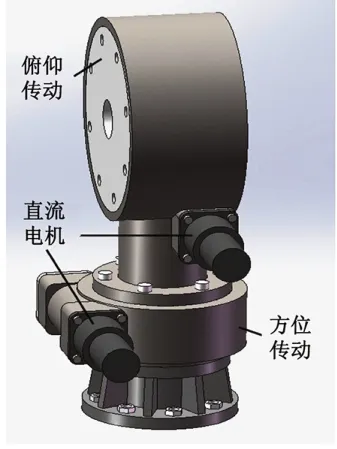
圖3 傳動機構
1.5 支撐結構與反射鏡
支撐結構主要由支架、梁結構、支撐等組成。傳動機構的俯仰旋轉驅動機構輸出軸的兩端各安裝一個主梁,主梁上的單元鏡支撐梁、斜撐等構成單元鏡支撐結構。反射鏡的尺寸為2 400 mm×1 830 mm,反射鏡采用反射率大于或等于93%的4 mm超白浮法玻璃鍍銀反射鏡,四邊磨C形邊,用環氧樹脂進行封邊處理,保證反射鏡壽命不低于25年。反射鏡通過擰入其背部陶瓷塊螺母內的螺桿和反射鏡鎖緊螺母被固定在單元鏡支架上。調節玻璃反射鏡與支架各結合點處的螺桿和反射鏡鎖緊螺母,就能夠將反射鏡調節到所需要的面形,在光靶上形成圓形太陽像。反射鏡面為球面,球面的半徑為定日鏡反射面中心到吸熱器中聚光靶心連線距離的2倍。支架的作用是保持反射鏡面形在固定后不發生變化,圖4所示為安裝后的定日鏡。

圖4 定日鏡
1.6 面型調整
定日鏡安裝之后,其反射鏡的面形需要現場調整以達到預定目標。通過研究實測的聚光光斑性能來進行調節。按照以下步驟調整:(1)在太陽光較好的時段,調節單個反射鏡的面形和四面反射鏡的整體面形;(2)選取目標靶;(3)調整各個單元反射鏡面形。用薄輕且不透明的布狀物遮蓋其余3塊單元反射鏡,只保留1塊單元反射鏡反射陽光,調節此單元反射鏡的玻璃反射鏡與單元鏡支架各個結合點處的螺桿和反射鏡鎖緊螺母,使各單元反射鏡在目標靶上的焦斑形狀接近圓形,使其光斑直徑達到設計值。按照此方法逐一調節單元反射鏡面形;(4)調節單元反射鏡與單元反射鏡支撐結構的連接螺栓上的鎖緊螺母,從而改變單元鏡的傾角,使各個單元反射鏡的焦斑重疊;(5)定日鏡連續跟蹤太陽,測試其光斑變化。
2 定日鏡跟蹤精確度測量
2.1 跟蹤精確度測試系統
定日鏡跟蹤精確度測量采用非接觸式視覺檢測方法,利用CCD相機采集定日鏡在目標靶上形成的光斑圖像,然后通過圖像處理獲取定日鏡聚光特性參數。系統主要由CCD相機、目標靶、計算機、圖像采集和處理軟件、風速風向傳感器、太陽法向直射輻照表等組成,如圖5所示。
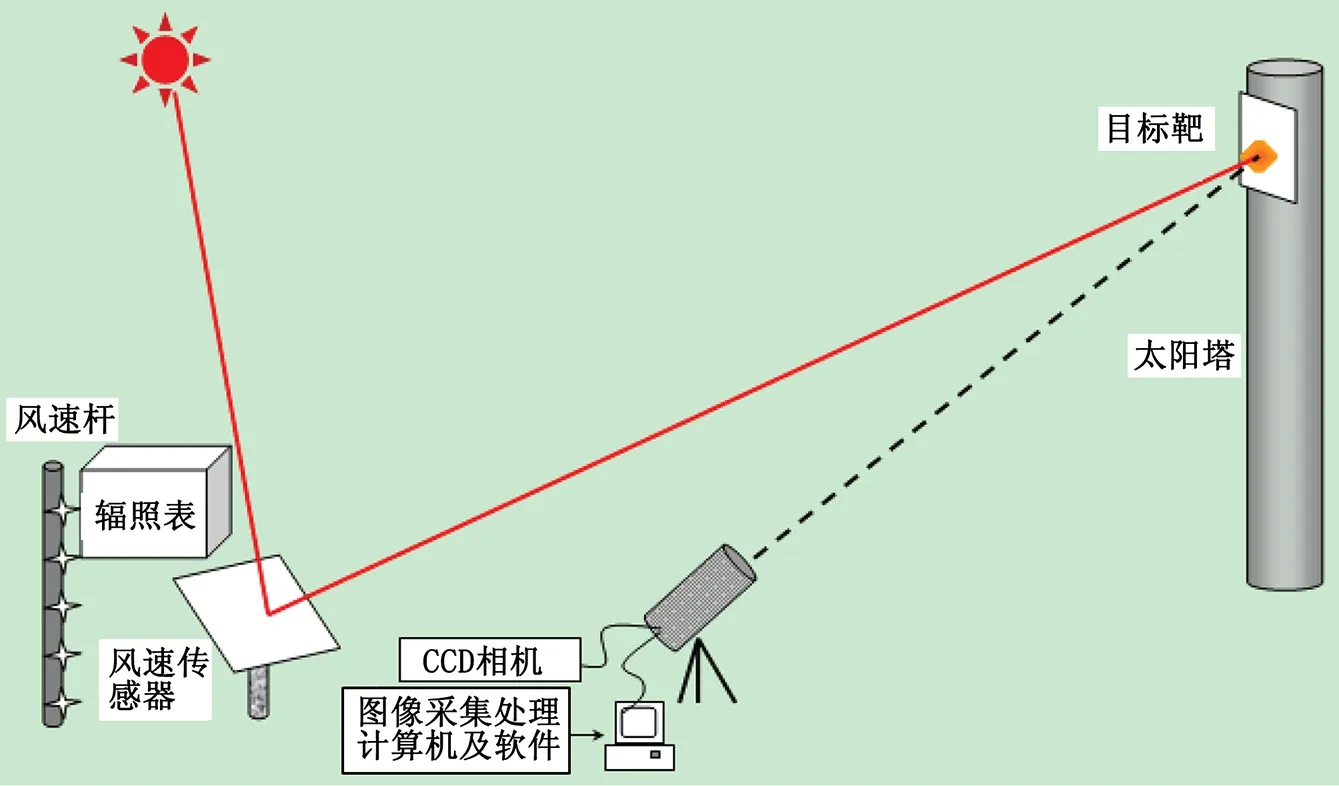
圖5 定日鏡跟蹤精確度測試系統組成
2.2 跟蹤精確度測試
測試周期內的風速必須覆蓋定日鏡要求的工作風速范圍(推薦為0~14 m/s),為此測試可能持續多天。通過調整CCD相機光圈、焦距、放大倍率、俯仰及方位角度可使目標靶充滿相機的整個視場。啟動定日鏡,使定日鏡將太陽輻射聚焦到目標靶。啟動CCD相機采集靶面的光斑圖像,覆蓋定日鏡的工作姿態范圍。分割采集的每幀光斑灰度圖像的光斑與背景,并以光斑內像素的總量作為光斑的面積。以與此面積相等的正方形作為光斑圖像中提取光斑的裁剪窗,用該裁剪窗在整個光斑圖案上進行截取,以所有截取窗口內灰度值總量最大的位置作為光斑有效區域,光斑有效區域的幾何中心即為光斑中心。分析采集到的第i幀光斑照片,通過以下公式計算此刻的定日鏡跟蹤精確度[14-15]:

式中:η為定日鏡跟蹤精確度;L為定日鏡的旋轉中心到目標點的斜向距離;μ為像素與長度的轉換因子;(x0,y0)為光斑圖像中目標靶的中心坐標;(xi,yi)為第i幀光斑照片中光斑幾何中心坐標。
通過采集18 612個采樣點,將其跟蹤精確度η結果表達如圖6所示。由圖可見測試期間內不同風速下定日鏡跟蹤精確度出現在3.5 mrad的頻率。從圖中可見定日鏡的跟蹤精確度較高,基本位于90%以上。根據采樣點計算得到的跟蹤精確度值,得到如下結果:在4 m/s風速下跟蹤準確度達到3.5 mrad的概率為99.6%;在8 m/s風速下跟蹤準確度達到3.5 mrad的概率為97.6%;在11 m/s風速下跟蹤準確度達到3.5 mrad的概率為97.1%。
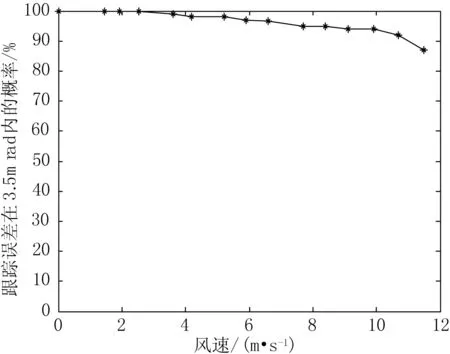
圖6 定日鏡跟蹤準確度在3.5 mrad內的概率(來自18 612個采樣點)
3 結束語
針對塔式太陽能熱發電系統研制了一種定日鏡。首先建立了定日鏡的模型,并介紹了定日鏡的總體方案,尤其對定日鏡的系統的手動模式、自動模式、其他控制模式進行詳細講解。簡述了其構成及參數,然后闡述了控制系統的控制原理、傳動機構的構成、支撐結構和反射鏡。最后敘述了定日鏡跟蹤準確度測試系統的組成及方法,并對定日鏡進行跟蹤精確度測試。設計的定日鏡跟蹤精確度值較高,通過18 612個采樣點數據的統計,在4~11 m/s風速下跟蹤準確度達到3.5 mrad的概率高于97%。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
云南教育·中學教師(2020年11期)2021-01-07 08:26:28
北京測繪(2020年12期)2020-12-29 01:33:58
山東煤炭科技(2020年1期)2020-03-06 06:43:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
新教育時代·教師版(2017年30期)2017-09-12 08:17:15
高考金刊·理科版(2012年3期)2012-01-01 00:00:00
