電梯制動(dòng)器自監(jiān)測(cè)開(kāi)關(guān)接線形式的快速自動(dòng)檢測(cè)*
2022-05-12 09:41:54陳建勛楊寧祥林曉明陳達(dá)安
機(jī)電工程技術(shù) 2022年4期
陳建勛,楊寧祥,林曉明,陳達(dá)安
(1.廣東省特種設(shè)備檢測(cè)研究院珠海檢測(cè)院,廣東珠海 519002;2.珠海市安粵科技有限公司,廣東珠海 519000)
0 引言
電梯已日益成為人們出行不可或缺的垂直交通工具,作為特種設(shè)備的一個(gè)大類,其安全性能得到越來(lái)越多的重視。制動(dòng)器是確保電梯正常運(yùn)行的重要安全部件,且使用頻率最高,作為電梯的“剎車系統(tǒng)”,制動(dòng)器故障若不及時(shí)發(fā)現(xiàn),電梯繼續(xù)帶病運(yùn)行,將導(dǎo)致轎廂沖頂、蹲底等事故,嚴(yán)重威脅乘客生命財(cái)產(chǎn)安全[1-3]。
現(xiàn)行標(biāo)準(zhǔn)GB 7588—2003《電梯制造與安裝安全技術(shù)規(guī)范》要求新安裝的電梯設(shè)置兩組制動(dòng)器,通過(guò)各自的制動(dòng)閘瓦與制動(dòng)輪接觸,實(shí)現(xiàn)電梯零速抱閘或緊急減速[4]。制動(dòng)器故障主要表現(xiàn)為動(dòng)作異常和制動(dòng)力不足兩類,其中,動(dòng)作異常分為打開(kāi)異常和合閘異常,是最普遍的故障類型。現(xiàn)行特種設(shè)備安全技術(shù)規(guī)范TSGT7001《電梯監(jiān)督檢驗(yàn)和定期檢驗(yàn)規(guī)則——曳引與強(qiáng)制驅(qū)動(dòng)電梯》第2.8條規(guī)定,應(yīng)當(dāng)具有制動(dòng)器故障保護(hù)功能,當(dāng)監(jiān)測(cè)到制動(dòng)器的提起(或者釋放)失效時(shí),能夠防止電梯的正常啟動(dòng)。檢驗(yàn)方法為通過(guò)模擬操作檢查制動(dòng)器故障保護(hù)功能[5]。制動(dòng)器故障保護(hù)功能的通用實(shí)現(xiàn)方法是通過(guò)兩組自監(jiān)測(cè)開(kāi)關(guān)(通常為微動(dòng)開(kāi)關(guān))監(jiān)測(cè)制動(dòng)器打開(kāi)和合閘的機(jī)械過(guò)程,發(fā)現(xiàn)動(dòng)作異常時(shí)及時(shí)觸發(fā)故障保護(hù)機(jī)制[6]。自監(jiān)測(cè)開(kāi)關(guān)接線形式不合規(guī)范將導(dǎo)致故障保護(hù)功能對(duì)特定制動(dòng)器動(dòng)作異常監(jiān)測(cè)失效,誘發(fā)安全隱患。傳統(tǒng)檢測(cè)方法通過(guò)參考電梯電氣原理圖在控制柜處查找接線端線號(hào),并使用萬(wàn)用表等工具對(duì)接線類型進(jìn)行檢測(cè),該方法需頻繁通斷電梯主開(kāi)關(guān)和拆接線、操作復(fù)雜、效率低下,現(xiàn)場(chǎng)檢驗(yàn)不方便[7]。本文介紹了制動(dòng)器動(dòng)作自監(jiān)測(cè)原理,分析了自監(jiān)測(cè)開(kāi)關(guān)不同接線形式及對(duì)應(yīng)的隱患,在此基礎(chǔ)上提出了一種新的自監(jiān)測(cè)開(kāi)關(guān)接線形式檢測(cè)方法并開(kāi)發(fā)了對(duì)應(yīng)的檢測(cè)裝置。
1 制動(dòng)器自監(jiān)測(cè)原理
當(dāng)電梯起動(dòng)時(shí)兩組制動(dòng)器應(yīng)全部打開(kāi),確保主機(jī)正常輸出力矩提升轎廂,當(dāng)?shù)竭_(dá)目標(biāo)層站或遇到特殊情況需緊急制停時(shí),兩組制動(dòng)器應(yīng)同時(shí)合閘,確保轎廂及時(shí)減速停止。以最常用的杠桿鼓式制動(dòng)器為例,結(jié)構(gòu)如圖1所示,制動(dòng)器動(dòng)作原理為:當(dāng)電梯啟動(dòng)時(shí)電磁鐵線圈得電使鐵心動(dòng)作,向外推出推桿,推桿使制動(dòng)臂克服壓縮彈簧作用向外張開(kāi),帶動(dòng)制動(dòng)襯離開(kāi)制動(dòng)輪,電梯得以正常運(yùn)行;當(dāng)?shù)秸净蚓o急制停時(shí),電磁鐵線圈失電,制動(dòng)臂在壓縮彈簧力作用下使制動(dòng)襯與制動(dòng)輪接觸,通過(guò)摩擦力實(shí)現(xiàn)制停,同時(shí)推桿被壓回。自監(jiān)測(cè)開(kāi)關(guān)主體固定安裝于曳引機(jī)殼體上,其測(cè)量頭與電磁鐵鐵心緊密接觸,制動(dòng)器動(dòng)作時(shí)鐵心運(yùn)動(dòng)使測(cè)量頭同步微動(dòng),自監(jiān)測(cè)開(kāi)關(guān)通斷狀態(tài)發(fā)生變化,并通過(guò)接線盒將通斷電信號(hào)發(fā)送到電梯控制柜,控制系統(tǒng)通過(guò)對(duì)比自監(jiān)測(cè)開(kāi)關(guān)狀態(tài)與電梯實(shí)際啟停狀態(tài)邏輯對(duì)應(yīng)關(guān)系對(duì)制動(dòng)器動(dòng)作狀態(tài)進(jìn)行監(jiān)測(cè),當(dāng)發(fā)現(xiàn)停梯未合閘或帶閘運(yùn)行時(shí)報(bào)故障并阻止電梯再次啟動(dòng)。
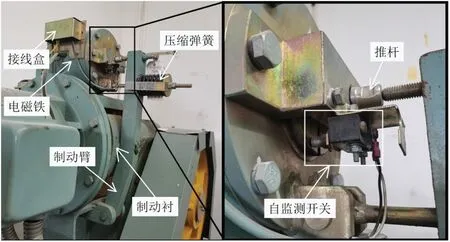
圖1 杠桿鼓式制動(dòng)器結(jié)構(gòu)圖
電梯設(shè)計(jì)、維護(hù)保養(yǎng)等過(guò)程中的不規(guī)范操作都將導(dǎo)致自監(jiān)測(cè)功能失效[8-10],例如,設(shè)計(jì)人員對(duì)檢驗(yàn)規(guī)程存在片面理解導(dǎo)致電氣原理設(shè)計(jì)缺陷;安裝人員未按照正確的圖紙進(jìn)行接線操作;維護(hù)保養(yǎng)人員在電梯檢修后未能對(duì)制動(dòng)器自監(jiān)測(cè)開(kāi)關(guān)接線狀態(tài)正確復(fù)位。接線形式?jīng)Q定了制動(dòng)器動(dòng)作時(shí)電梯控制系統(tǒng)接收到的信號(hào)類型,正確的接線形式是制動(dòng)器故障保護(hù)功能正常工作的前提。
2 不同接線形式及隱患
自監(jiān)測(cè)開(kāi)關(guān)有常開(kāi)和常閉(根據(jù)電梯停止時(shí)開(kāi)關(guān)通斷狀態(tài)判斷)兩種接線狀態(tài),且有獨(dú)立信號(hào)、串聯(lián)、并聯(lián)3種接線方式,組合后將有6組不同接線形式,如圖2所示,分別為常開(kāi)獨(dú)立接線、常閉獨(dú)立接線、常開(kāi)并聯(lián)接線、常閉并聯(lián)接線、常開(kāi)串聯(lián)接線、常閉串聯(lián)接線。其中,KBZ1和KBZ2分別為制動(dòng)器一和制動(dòng)器二的自監(jiān)測(cè)開(kāi)關(guān),通過(guò)直流24 V供電提供開(kāi)關(guān)量監(jiān)控信號(hào)。
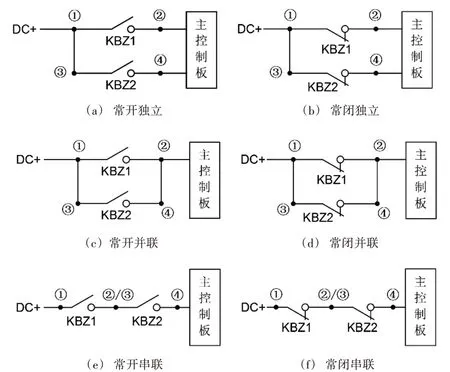
圖2 六種自監(jiān)測(cè)開(kāi)關(guān)接線形式
常開(kāi)獨(dú)立和常閉獨(dú)立接線形式均有兩個(gè)控制信號(hào)獨(dú)立接至電梯主控制板,為符合要求的正常接線形式,在這兩種接線形式下控制系統(tǒng)可對(duì)兩個(gè)制動(dòng)器的抱閘與松閘狀態(tài)分別進(jìn)行確認(rèn),而其余4種接線形式均為隱患接線形式[11]。對(duì)于常開(kāi)并聯(lián)接線形式,電梯運(yùn)行時(shí)KBZ1和KBZ2都應(yīng)閉合,主控板接收高電平信號(hào),若其中一組制動(dòng)器打開(kāi)失敗導(dǎo)致KBZ1和KBZ2有一個(gè)未閉合時(shí),主控板仍然接收到高電平信號(hào);對(duì)于常閉并聯(lián)接線形式,電梯停止時(shí)KBZ1和KBZ2都應(yīng)該閉合,若出現(xiàn)一組制動(dòng)器合閘失敗導(dǎo)致KBZ1或KBZ2其中一個(gè)未閉合時(shí),電梯主控制板仍然接收到高電平信號(hào);對(duì)于常開(kāi)串聯(lián)接線形式,電梯停止時(shí),正常情況下KBZ1和KBZ2都應(yīng)該斷開(kāi),若出現(xiàn)一組制動(dòng)器合閘失敗導(dǎo)致KBZ1或KBZ2有一個(gè)未斷開(kāi)時(shí),主控板仍然接收到低電平信號(hào);對(duì)于常閉串聯(lián)接線形式,電梯運(yùn)行時(shí),正常情況下KBZ1和KBZ2都應(yīng)斷開(kāi),若出現(xiàn)一組制動(dòng)器打開(kāi)失敗導(dǎo)致KBZ1或KBZ2有一個(gè)未斷開(kāi)時(shí),主控板仍然接收到低電平信號(hào)。常開(kāi)并聯(lián)和常閉串聯(lián)接線形式將導(dǎo)致控制系統(tǒng)不能對(duì)制動(dòng)器單邊打開(kāi)失敗故障進(jìn)行有效監(jiān)測(cè),導(dǎo)致電梯帶閘運(yùn)行,加劇制動(dòng)輪磨損,降低制動(dòng)力矩,故障若未及時(shí)處理將使制動(dòng)襯或制動(dòng)輪提前報(bào)廢。常閉并聯(lián)和和常開(kāi)串聯(lián)接線形式將導(dǎo)致控制系統(tǒng)不能對(duì)單邊合閘失敗故障進(jìn)行有效監(jiān)測(cè),導(dǎo)致電梯停止時(shí)僅有一個(gè)制動(dòng)器執(zhí)行制動(dòng)操作,降低了總制動(dòng)能力,可能導(dǎo)致轎廂意外移動(dòng)。
3 快速自動(dòng)檢測(cè)方法
3.1 外接檢測(cè)開(kāi)關(guān)設(shè)置
外接檢測(cè)開(kāi)關(guān)設(shè)置方式如圖3所示,采用3個(gè)檢測(cè)開(kāi)關(guān)Ka、Kb1和Kb2對(duì)制動(dòng)器自監(jiān)測(cè)開(kāi)關(guān)輸出信號(hào)進(jìn)行控制,以常開(kāi)接線形式為例,Kb1與Kb2分別與兩個(gè)自監(jiān)測(cè)開(kāi)關(guān)串聯(lián),Ka與其中一個(gè)自監(jiān)測(cè)開(kāi)關(guān)并聯(lián)。對(duì)串聯(lián)接線形式的電路進(jìn)行檢測(cè)時(shí),事先不知道兩個(gè)自監(jiān)測(cè)開(kāi)關(guān)接至主板的前后循序,故可能存在兩種外接檢測(cè)開(kāi)關(guān)設(shè)置方式,即Ka與遠(yuǎn)離主控制板的自監(jiān)測(cè)開(kāi)關(guān)并聯(lián)或Ka與接近主控制板的自監(jiān)測(cè)開(kāi)關(guān)并聯(lián),具體為何種接線方式對(duì)判斷過(guò)程并無(wú)影響。為使外接檢測(cè)開(kāi)關(guān)設(shè)置好后不改變電梯原電路邏輯狀態(tài),Ka默認(rèn)為常開(kāi)狀態(tài),Kb1和Kb2默認(rèn)為常閉狀態(tài)。
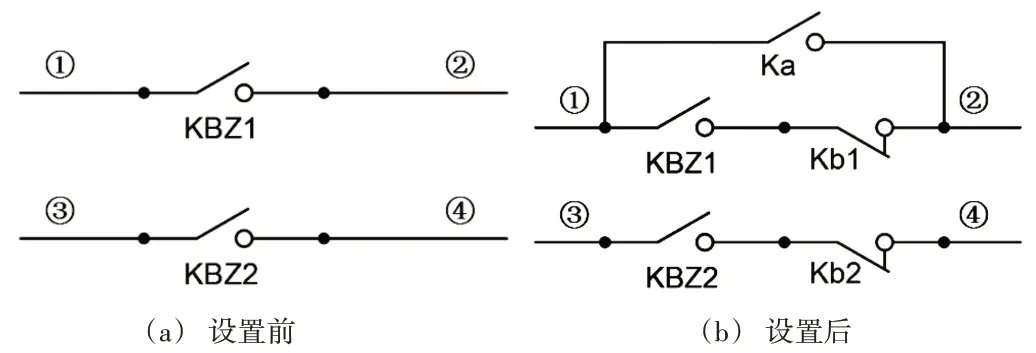
圖3 外接檢測(cè)開(kāi)關(guān)設(shè)置方式
3.2 接線形式判斷邏輯
通過(guò)設(shè)置Ka、Kb1和Kb2通斷狀態(tài),并測(cè)量KBZ1的①、②兩端電壓V12、KBZ2的③、④兩端電壓V34,通過(guò)不同檢測(cè)開(kāi)關(guān)通斷狀態(tài)下V12和V34是否為0的邏輯關(guān)系對(duì)6種接線形式進(jìn)行判斷。采用的3種外接檢測(cè)開(kāi)關(guān)通斷狀態(tài)檢測(cè)模式分別為:模式一,Ka、Kb1、Kb2均斷開(kāi);模式二,Ka斷開(kāi)、Kb1、Kb2任意一個(gè)斷開(kāi),另一個(gè)閉合;模式三,Ka閉合、Kb1斷開(kāi)、Kb2斷開(kāi)。
不同接線形式在3種檢測(cè)模式下V12和V34結(jié)果如表1所示。在模式一下,若V12和V34均為0,說(shuō)明為常開(kāi)串聯(lián)或常閉串聯(lián)接線形式,若均不等于0,則為其余4種接線形式。在模式二下,若V12和V34均不為0,則為常開(kāi)接線形式,若存在一個(gè)為0另一個(gè)不為0,則為常閉獨(dú)立或常閉串聯(lián)接線形式,若V12和V34均為0,則為常閉并聯(lián)接線形式。在模式三下,若V12和V34均為0,則為并聯(lián)接線形式,若其中一個(gè)為0,另一個(gè)不為0,則為信號(hào)獨(dú)立或串聯(lián)接線形式。
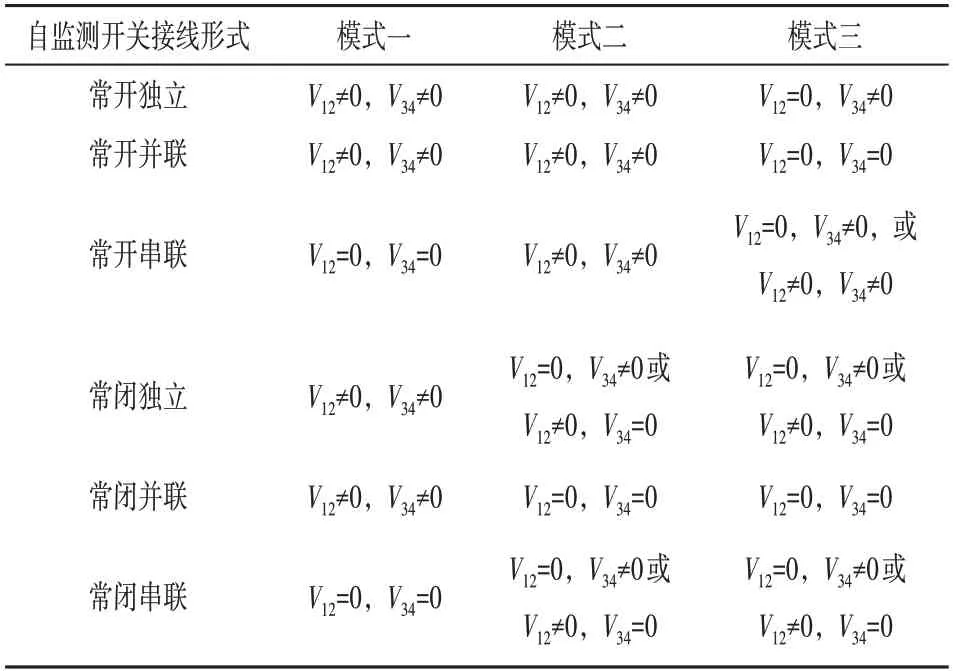
表1 不同接線形式在不同模式下電壓結(jié)果
根據(jù)表1,一種可行的檢測(cè)流程如圖4所示。先采用模式一設(shè)置檢測(cè)開(kāi)關(guān),測(cè)量V12和V34,若兩者均為0,則為串聯(lián)接線,否則為獨(dú)立或并聯(lián)接線。對(duì)于串聯(lián)接線方式,再采用模式二設(shè)置檢測(cè)開(kāi)關(guān),若V12和V34均不為0,則為常開(kāi)串聯(lián)接線,否則為常閉串聯(lián)接線。對(duì)于非串聯(lián)接線方式,則繼續(xù)通過(guò)模式二進(jìn)行檢測(cè),若V12≠0且V34≠0,則為常開(kāi)獨(dú)立或常開(kāi)并聯(lián)接線,否則為常閉獨(dú)立或常閉并聯(lián)接線,對(duì)于前者,在模式三下進(jìn)一步判斷,若V12=0且V34=0,則為常開(kāi)并聯(lián)接線,否則為常開(kāi)獨(dú)立接線,對(duì)于后者,若在模式二下V12=0且V34=0,則為常閉并聯(lián)接線,否則為常閉獨(dú)立接線。除圖4所示流程外,測(cè)試時(shí)也可改變3種通斷模式執(zhí)行順序,達(dá)到相同的檢測(cè)結(jié)果。
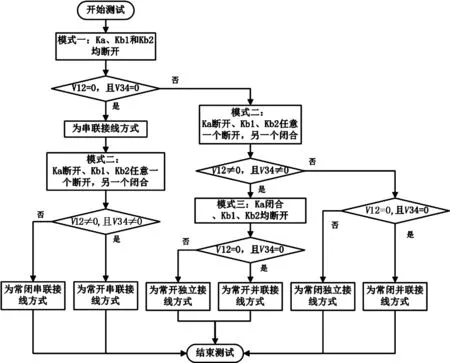
圖4 接線形式的邏輯判斷檢測(cè)流程
4 檢測(cè)裝置設(shè)計(jì)
檢測(cè)裝置控制模塊原理如圖5所示。外接檢測(cè)開(kāi)關(guān)由3個(gè)繼電器輸出端實(shí)現(xiàn),其中OUT1為常開(kāi)觸點(diǎn),對(duì)應(yīng)檢測(cè)開(kāi)關(guān)Ka,OUT2和OUT3為常閉觸點(diǎn),分別對(duì)應(yīng)檢測(cè)開(kāi)關(guān)Kb1和Kb2。自監(jiān)測(cè)開(kāi)關(guān)兩端電壓V12和V34分別由電壓測(cè)量通道Vin1和Vin2進(jìn)行檢測(cè)。模塊通訊方式為RS485通訊,模塊供電電壓范圍為DC9~24 V。
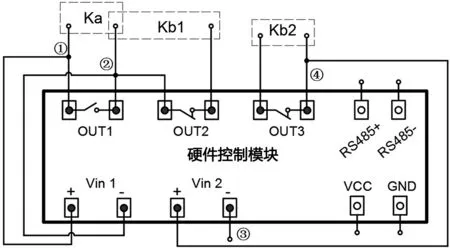
圖5 檢測(cè)裝置控制模塊原理
檢測(cè)裝置硬件外觀如圖6所示,有兩組共6個(gè)測(cè)試端實(shí)現(xiàn)外接檢測(cè)開(kāi)關(guān)不同模式控制和電壓測(cè)量,其中3個(gè)用于自監(jiān)測(cè)開(kāi)關(guān)一檢測(cè),另外3個(gè)用于自監(jiān)測(cè)開(kāi)關(guān)二檢測(cè),實(shí)現(xiàn)方式為帶鱷魚(yú)夾的三芯同軸信號(hào)線。硬件控制模塊外接一RS485/WIFI通信轉(zhuǎn)換模塊實(shí)現(xiàn)與平板電腦通訊,通過(guò)手持式平板電腦實(shí)現(xiàn)人機(jī)交互,進(jìn)行檢測(cè)過(guò)程控制。

圖6 檢測(cè)裝置硬件
5 現(xiàn)場(chǎng)測(cè)試
使用開(kāi)發(fā)的裝置對(duì)某企業(yè)一貨梯塊式鼓式制動(dòng)器自監(jiān)測(cè)開(kāi)關(guān)接線形式進(jìn)行檢測(cè)。在電梯機(jī)房斷開(kāi)主開(kāi)關(guān),拆開(kāi)曳引主機(jī)上接線盒蓋板,將檢測(cè)裝置的兩根三芯測(cè)試線分別接至微動(dòng)開(kāi)關(guān)一和微動(dòng)開(kāi)關(guān)二接線端,打開(kāi)測(cè)試裝置硬件和平板電腦應(yīng)用程序,實(shí)現(xiàn)組網(wǎng),準(zhǔn)備就緒后閉合電梯主開(kāi)關(guān),關(guān)閉電梯外呼功能,使其處于停止?fàn)顟B(tài)。測(cè)試時(shí)依次選擇3種外接開(kāi)關(guān)檢測(cè)模式,裝置自動(dòng)控制外接開(kāi)關(guān)通斷狀態(tài)并記錄V12和V34值,在檢測(cè)模式一和檢測(cè)模式二下,V12和V34均為23.75 V左右,在檢測(cè)模式三下V12近似為0,V34為23.76 V,結(jié)果顯示為“常開(kāi)獨(dú)立接線”,符合制動(dòng)器故障保護(hù)功能的接線要求,V12、V34電壓邏輯與檢測(cè)結(jié)果關(guān)系符合表1。
6 結(jié)束語(yǔ)
電梯制動(dòng)器自監(jiān)測(cè)開(kāi)關(guān)接線類型的判斷是制動(dòng)器故障保護(hù)功能檢測(cè)的重要內(nèi)容。根據(jù)開(kāi)關(guān)開(kāi)閉狀況、串并聯(lián)接線方式的不同,自監(jiān)測(cè)開(kāi)關(guān)常見(jiàn)接線形式有6種,其中常開(kāi)獨(dú)立或常閉獨(dú)立信號(hào)接線形式是實(shí)現(xiàn)兩組制動(dòng)器打開(kāi)、合閘動(dòng)作故障被獨(dú)立監(jiān)測(cè)并觸發(fā)制動(dòng)器故障保護(hù)機(jī)制的前提。本文提出了3種外接檢測(cè)開(kāi)關(guān)通斷控制模式,通過(guò)測(cè)量不同模式下自監(jiān)測(cè)開(kāi)關(guān)兩端電壓并根據(jù)電壓邏輯關(guān)系可實(shí)現(xiàn)自監(jiān)測(cè)開(kāi)關(guān)接線類型的準(zhǔn)確判斷,解決了傳統(tǒng)方法檢測(cè)時(shí)操作復(fù)雜、效率低下的問(wèn)題。開(kāi)發(fā)的檢測(cè)裝置可實(shí)現(xiàn)電梯現(xiàn)場(chǎng)快速檢測(cè),采用的電壓信號(hào)被動(dòng)采集方式不會(huì)對(duì)電梯控制系統(tǒng)輸出能量,確保了檢測(cè)過(guò)程安全性。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年3期)2018-01-31 02:18:58
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
小學(xué)生時(shí)代·綜合版(2016年7期)2016-05-14 17:53:49
小說(shuō)月刊(2015年4期)2015-04-18 13:55:18
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
