淺談一種無線電高度表檢查儀的設計
2022-05-18 07:24:00許海
中國設備工程 2022年8期
許海
(國營蕪湖機械廠,安徽 蕪湖 241007)
某型無線電高度表檢查儀的研制是為了適應高新軍事技術的飛速發展,研制要求檢測系統具有較高的自動化測試能力,提高對產品的測試速度和精度,確保某型無線電高度表各項性能指標均符合要求。該檢測儀采用了現代計算機技術、測量技術、軟件編程技術,結合現代航空高度表的智能化、綜合化測試要求,本著節約經費的原則,提出了無線電高度表測試的新思想、新方法。
1 硬件設計
用計算機來實現高度表性能測試過程控制的系統包括兩大部分,即工業控制計算機和被測高度表系統。組成框圖見圖1。
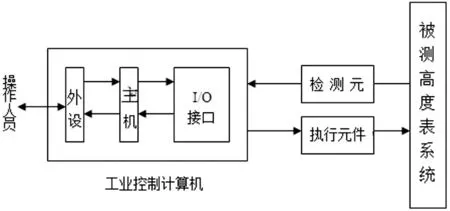
圖1 控制系統組成框圖
1.1 工控機
工控機主機系統是高度表檢查儀串行和并行數據接收、處理和結果顯示的核心。使用工控機控制和數據處理,減小了系統實現的復雜度,使用的元件數量比原俄制無線電高度表檢查儀大大減少,提高了系統的可靠性,擴展了系統功能。工控機主機系統主要完成以下幾方面的工作:(1)接收無線電高度表輸出的并行和串行高度數據及狀態信息;(2)分析串行碼的狀態信息,計算高度值;(3)驅動主顯示電路顯示高度值和相關狀態信息;(4)分析高度表檢查儀的工作狀態,自動完成部分操作;(5)自檢高度表檢查儀的主要電路;(6)實時監控高度表發出的各種狀態信號;(7)發出各種操作控制信號;(8)通過IEEE-488接口與其他設備交聯;(9)檢測參數、存儲數據和報表打印。
輸入輸出(I/O)接口在計算機和被測高度表系統之間起著聯系和橋梁的作用,它完成以下兩個基本功能:(1)輸入接口把測試過程的各種參數和執行機構的運行狀態,轉換成計算機能夠識別和接收的信號,并輸入計算機,以便計算機進行運算處理。(2)輸出接口把計算機根據算術和邏輯運算的結果發出的各種控制指令,轉換成操作執行機構的控制信號,以便通過執行機構去控制測試過程。
系統利用IEEE-488接口總線和各類設備專用接口線,將工控機與各個單元有機地連接成一個集控制、采集、處理、顯示、打印、數據存儲為一體的無線電高度表性能測試綜合平臺。系統依據測試工藝流程所要求的測試條件,由自制的輸出信號調理模塊產生相應測試激勵信號,被測信號先經過自制的輸入信號調理模塊的轉換,再送至適配器端口進行測量,測試的結果由顯示器顯示,從而對無線電高度表進行全面的數據處理、性能調整與故障定位分析。
工控機主機處理的狀態信息分為三部分,一部分是無線電高度表輸出的27V狀態信號,該信號的內容包括:“良好”“危險高度信號1”“危險高度信號2”“一次性信號1”“一次性信號2”“一次性信號3”“高度表接通”“高度表準備好”;其次,是由檢查儀發出的“發射機接通”“高度表自檢”“檢查儀接通”“紅燈”“白燈”指令的狀態;第三種是由32位串行碼中分離出來的狀態信號有“狀態1”“偶數”、“正常”“檢查”“標準”“地址”和“截獲”等。這些狀態信號經工控機主機處理后,在顯示屏上顯示出來。
1.2 高度表檢查儀串行碼模擬和串行碼接收模塊
該組件包括時鐘產生電路、模擬32位串行碼產生電路、單-雙極性變換電路、雙-單極性變換電路、串行碼時鐘和數據恢復電路、延遲電路、串-并行碼轉換電路、并行碼鎖存電路、進位和清除脈沖形成電路。無線電高度表輸出串行碼和模擬串行碼的信號方式為圖2所示的雙極性三電平信號。
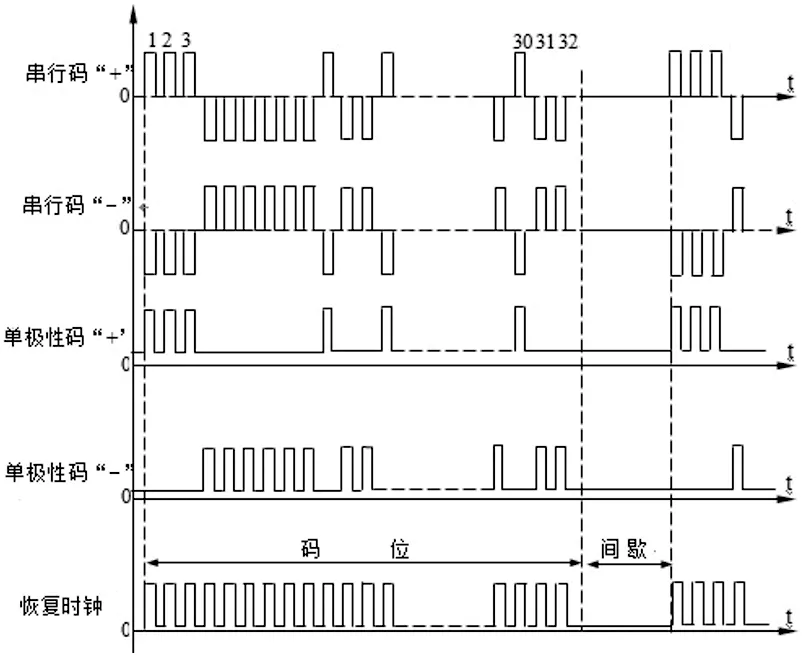
圖2 32位串行碼波形
晶體振蕩器輸出2MHz的信號,經分頻后產生100kHz左右的方波信號,作為模擬串行碼產生電路和進位及清除脈沖形成電路的基本時鐘。分頻器用可編程邏輯器件實現。
模擬32位串行碼產生電路由J—K觸發器構成的反饋移位寄存器實現,產生碼長為36位的周期序列,其中前32位為有效碼,后4位為起止碼,模擬串行碼產生器先輸出最低位值。在“量程1”時,32位碼的16進制表示為07807807H,模擬高度值為30727.5m;在“量程2”時,模擬高度值為7681.5米。
1.3 模擬脈沖延遲速率/范圍單元
該組件電路按照功能可以分為時間延遲電路、控制電路、延遲脈沖形成電路三部分,如圖3所示。
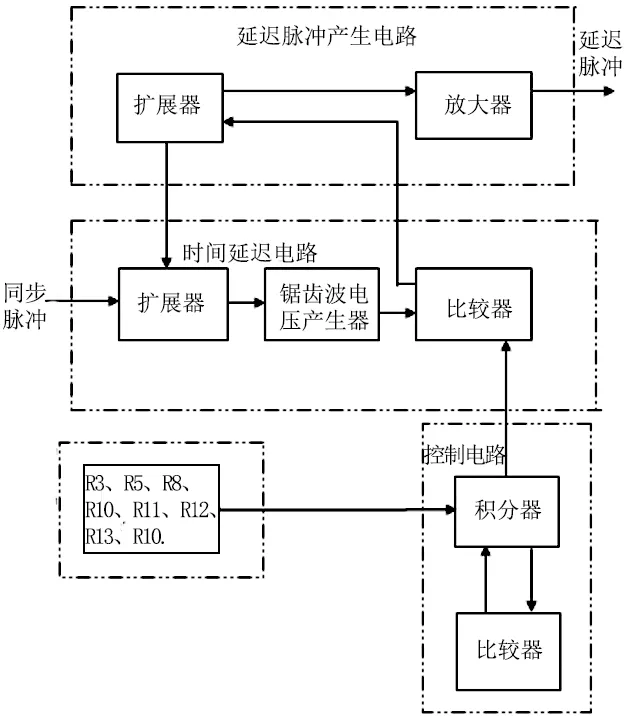
圖3 模擬脈沖延遲速率/范圍單元原理框圖
時間延遲電路由擴展器,鋸齒波電壓產生器和比較器組成。無線電高度表送出的測距同步脈沖經時間延遲電路的擴展電路,將高電平脈沖變換成低電平,控制鋸齒波電壓產生器工作,鋸齒波電壓產生器在擴展電路的控制下,產生快鋸齒波電壓送到幅度比較電路,與從控制電路來的慢鋸齒波電壓進行比較,在電壓相等的瞬間,比較器的輸出端產生觸發脈沖,而慢鋸齒波電壓的幅值確定了這個脈沖相對同步脈沖的延遲大小。比較器的輸出端產生觸發脈沖經整形后,一路加到擴展器,把延遲脈沖進行擴展;而另一路送到輸出驅動電路,經變壓器T2耦合輸出。
在模擬速度變化時,慢鋸齒波產生器是一個積分器;在模擬高度范圍時,則是一個放大器。
1.4 模擬信號調理單元原理電路
該電路包括交流和直流調理電路、譯碼選擇電路、驅動電路、繼電器陣列四部分組成。譯碼選擇電路通過對控制電路輸出的六位控制碼譯碼,譯碼信號經驅動,控制相應的繼電器選通,直接或將調理后的一路交流和一路直流信號選擇輸出到交流和直流測試端。考慮到檢測的模擬信號電壓范圍從上百伏到一伏以下,因此,采用繼電器陣列進行信號的選擇輸出。
1.5 高度表檢查儀電源組件
電源組件用27V直流電源供電,由兩塊DC-DC模塊和CW7905組成。DC-DC模塊PKA24PIL的輸入電壓范圍為19~35V,輸出+5V最大電流為8A,在-40~+85℃環境中可滿功率輸出。DC-DC模塊PKA2323PI的輸入電壓范圍為19~35V,分別輸出+12V和-12V,電流可達2A。-12V電壓經三端穩壓塊CW7905穩壓輸出-5V的電壓,-12V和-5V在系統中的最大負載小于0.5A。
2 軟件設計
針對檢測任務的特點和要求,檢測軟件要實現以下方面的性能:(1)自動性。在對所有檢測項目進行檢測時,自動檢查項目可以自由選擇,在自動檢查時,能夠在最少人工干預的條件下,連續自動進行條件判斷、捕捉信號、控制設備、檢測結果、數據處理等工作。(2)交互性。可以提供友好、直觀的數據顯示形式、方便的控制的界面元素。包括模擬高度指示燈、頻率顯示、波道顯示、功率顯示、時間顯示、檢測數據記錄顯示等。(3)實時性。在檢測高度表的過程中,特別是檢查速度模擬、靈敏度等項目時,實時性要求高。(4)可靠性。保證檢測結果的可靠性、一致性、有效性是正確檢測的前提。整個檢測系統中數據的獲取應盡量通過標準儀器進行獲取,對檢測數據要做一定的數據處理,如均值法,最大最小值法等。(5)安全性。包括檢測過程中對設備的安全性和檢測數據記錄、操作權限的安全性。檢測過程中,在有可能對設備儀器造成損壞的情況下,要能夠自動識別、自動保護。對操作者的使用權限進行注冊,并用口令進行保護限制。
2.1 硬件訪問方式
本檢測系統建立在以PC總線和IEEE488總線為基礎的檢測平臺上,一部分通過IEEE488總線以及GPIB接口將標準通用儀器與工業控制計算機連接起來,控制通用儀器做出相應的操作,或將檢測的結果數據送入計算機進行處理和顯示;另一部分通過標準數據采集卡進行控制和獲取數據。針對GPIB的編程。考慮到本檢測系統對硬件訪問的復雜度,采用了嵌入匯編程序的方法。這是因為本軟件中對硬件的操作止于對端口的讀寫,而沒有DMA、中斷等復雜的操作。這樣可簡化編程難度,增加調試靈活性,降低開發周期與成本。由于操作簡單,所以只要地址正確,就可保證訪問的安全性。
2.2 軟件結構模型
為了提高軟件的后期易維護性,可升級性,本軟件采用了部分基于DLL(動態鏈接庫)技術的模塊化結構:針對各個檢測任務的模塊,即需要經常完善修改的部分被做成DLL,而相對穩定的界面、數據庫等部分則直接做成可執行文件。這樣,需要修改檢測部分程序時,只需提供相應的修正版本的DLL即可,而不需要重新再進行編譯。
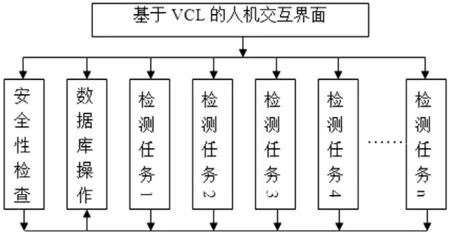
圖4 軟件結構模型
3 結語
本方案充分考慮測試的需求以及系統的可擴展性、易操作性、實用性等要求,采用總線化、模塊化的測試技術組建的自動測試平臺;采用先進的通用測試軟件平臺、測試總線標準等技術。該方案不僅完成了對某型無線電高度表的性能檢測,并且為某型飛機地面檢測設備國產化奠定了基礎,為我國新型飛機的研制提供了新的思路和方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
