配合間隙對液壓重載機械臂定位精度的影響
2022-05-19 05:14:42申浩翰王富勇胡同海楊柳松夏紅峰
礦山機械 2022年5期
郝 兵,申浩翰,王富勇,胡同海,楊柳松,夏紅峰,李 楊
1中信重工機械股份有限公司 河南洛陽 471039 2礦山重型裝備國家重點實驗室 河南洛陽 471039 3洛陽礦山機械工程設計研究院有限責任公司 河南洛陽 471039 4金堆城鉬業汝陽有限責任公司 河南汝陽 471200
隨 著現代工業的快速發展,礦山設備逐漸趨于 大型化,大型設備的維護保養及輔助生產對工作環境、安全及效率提出了更高的要求[1-2]。重載機械臂有助于提高大負載作業的工作效率,降低作業難度和人工成本[3],在礦山領域得到了廣泛的應用。
國內外學者對重載機械臂進行了大量的研究工作,取得了較大的進展。熊小輝[4]對重載機械臂模型進行了運動分析和控制系統仿真,研究了機械臂設計參數對性能、功能指標的影響規律;郝兵等人[5]對重載機械手的多體動力學剛-柔耦合模型進行仿真研究,結合有限元分析,為機械臂的液壓缸、電動機和結構設計提供了參考;趙天聞等人[6]利用 ADAMS 軟件對重載機械臂末端的運動軌跡進行多體動力學分析,給出了一種機械臂平穩運動的方法;楚旭等人[7]為提高磨機換襯板機械臂的定位精度和運行平穩性,通過仿真研究,設計了一種電液控制策略;毛龍銳等人[8]通過對重載機械臂進行多體動力學仿真研究,優化了末端輸出功率;徐賽華[9]對液壓重載機械臂進行了有限元和多體動力學分析,提出了一種最優截面參數的輕量化設計方法,提高了定位精度;S.C.Liu 等人[10]提出了一種無需外部傳感器的工業機器人觸覺控制方法,提高了機械臂與操作工人的協同裝配效率;W.Q.Lu 等人[11]確定了柔順裝配機械手驅動電動機的初始位置,從而實現了裝配機械手的高轉矩快速啟動。
以上研究為重載機械臂的設計、控制和定位精度等方面提供了大量參考,但是對重載機械臂定位精度影響因素的研究仍存在空缺。為此,筆者以配合間隙對重載機械臂定位精度的影響為目標,進行間隙配合函數構建方法的研究。
1 配合間隙的確定
為了實現對多段伸縮式重載機械臂各臂節間配合間隙的模擬,首先要對機械臂伸縮特性進行分析,針對單段伸縮機械臂建立簡化模型,找到機械臂在伸縮過程中的關鍵點,并對關鍵點的運動狀態進行研究。
1.1 伸縮式機械臂簡化模型
伸縮式機械臂簡化模型如圖 1 所示,主要分為內筒體和外筒體,筒體內部與液壓缸相連。兩筒體形狀相似,內筒體較外筒體尺寸更小,使得內筒體能夠將其大部分結構置于外筒體中。在機械臂進行伸縮運動時,連接在內外筒體上的液壓缸對筒體提供推力,使得內外筒體產生相對軸向運動。

圖1 伸縮式機械臂簡化模型Fig.1 Simplified model of telescopic robotic arm
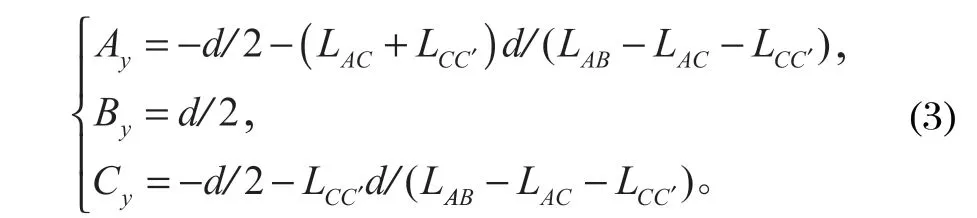
由圖 1 可以看出,機械臂的內外筒體也可以看作是機械臂的內外臂,內外臂間存在一定的間隙。雖然實際結構中使用了如橡膠之類的彈性體在間隙的合適位置進行填充,但是考慮到裝配需要和填充物的彈性變形,間隙的存在不可避免。通常情況下間隙尺寸較機械臂而言非常小,為便于分析,繪制了機械臂收縮狀態示意圖,如圖 2 所示。圖 2 中,黑色實線代表外臂且互相平行,兩線段間的距離即為配合間隙d,黑色虛線代表內臂。根據左側坐標系定義水平方向為x向,豎直方向為y向。兩臂節的關鍵點已標出,其中關鍵點A、B、C位于內臂,A′、B′位于外臂。各關鍵點的x、y軸坐標由關鍵點代號加x、y下角標表示。

圖2 配合間隙示意Fig.2 Sketch of fit clearance
1.2 臂節關鍵點的運動方程
由于圖 2 中機械臂所處的狀態為收縮狀態,所以Ax′=Cx,且d=。內臂水平方向的傾角α也可求出。

式中:LBC為線段BC的長度。
此時內臂的關鍵點C相較于不考慮配合間隙時的理論位置,向y軸負方向偏移了 0.5d;關鍵點B向y軸正方向偏移了 0.5d;關鍵點A向y軸負方向偏移了 0.5d+LACsinα。
當機械臂進行伸縮運動將內臂伸出時,圖 2 中各關鍵點的相對位置變化情況如圖 3 所示。內臂的伸出長度可表示為LCC′,內臂傾角由α變化為α′,且可表示為

圖3 內臂伸出示意Fig.3 Sketch of inner-arm extension

此時內臂上關鍵點C向y軸負方向偏移了d/2′;B的偏移量較收縮狀態無變化,仍為d/2;A向y軸負方向偏移了
綜上所述,關鍵點A、B、C基于中心軸y軸的偏移量方程為

將式 (1) 中的三角函數轉換為線段表示

將式 (2) 中各方程的自變量均由內臂伸出長度LCC′替代,可得
此方程即為關鍵點A、B、C隨內臂伸出長度LCC′變化而變化的y軸運動方程。
1.3 限位方程和接觸函數的確定
在確定了內臂各關鍵點的運動方程后,下一步就是將運動方程引入試驗。多體動力學軟件 ADAMS 中的多種接觸函數能夠滿足不同的使用需求,結合筆者需要解決的工程問題,最終選用雙邊接觸函數 (Twosided Impact in Contact Function) 作為試驗中內外臂節間的接觸函數。
雙邊接觸函數的工作原理是將不同零件上兩個關鍵點的相對位置關系和相對速度關系,代入設定好的限位方程和接觸力方程,來判斷零件之間是否接觸,并在兩個關鍵點上施加相互作用力。由于試驗中僅考慮配合間隙對機械臂定位精度的影響,因此只需通過限位方程來約束關鍵點的相對位置即可。接觸力需要在不減緩求解速度的前提下設定為一個較大的數值,于是通過大量的試驗,最終尋找到一組合適的接觸力方程,設定參數能夠滿足上述需求。
函數中各參數的設置如圖 4 所示,各設定參數按照不同功能可分為三類。

圖4 雙邊接觸函數設定Fig.4 Settings of two-sided impact contact function
(1) 第一類為輸入參數,即需要從模型中引入的參數,Displacement Variable 代表兩關鍵點間的相對位置,Velocity Variable 代表兩關鍵點間的相對速度;
(2) 第二類為作用力參數,即決定兩關鍵點間相互作用力大小的參數,Stiffness Coefficient 代表剛度系數 (設定為 1×108),Stiffness Force Exponent 代表剛度力指數 (設定為 1.5),Damping Coefficient 代表阻尼系數 (設定為 1×103),Damping Ramp-up Distance 代表阻尼斜坡距離 (設定為 1×10-10);
(3) 第三類為限位參數,即用于約束關鍵點間相對運動范圍的參數,High Trigger for Displacement Variable 代表高限位,Low Trigger for Displacement Variable 代表低限位。
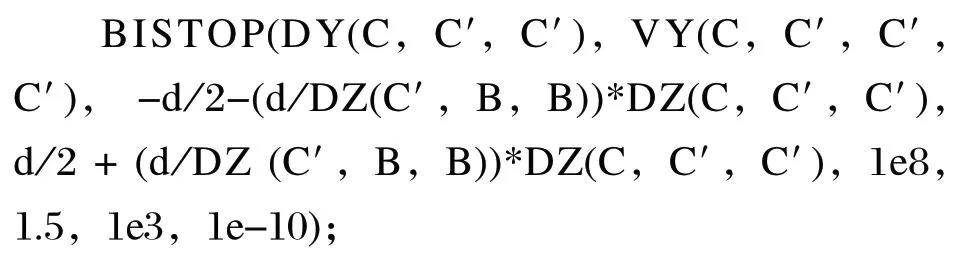
通過上述分析,結合式 (3) 中給出的關鍵點限位方程,可得出關鍵點C在x軸方向上的雙邊接觸函數,轉化成 ADAMS 為:

關鍵點B的x軸雙邊接觸函數為:

同理,關鍵點C的y軸雙邊接觸函數為:
關鍵點B的y軸雙邊接觸函數為:

2 雙邊接觸函數的驗證及其在重載機械臂上的應用
在建立了用于模擬配合間隙的雙邊接觸函數后,需要對其可靠性進行驗證,然后即可將其應用于伸縮式液壓重載機械臂,研究配合間隙對機械臂定位精度的影響。
2.1 雙邊接觸函數的驗證
為了驗證雙邊接觸函數的可靠性,建立了簡化后的機械臂 ADAMS 模型,并引入雙邊接觸函數來對關鍵點的運動軌跡進行跟蹤。
簡化后的機械臂 ADAMS 模型僅保留了內外臂,如圖 5 所示。內臂和外臂臂右端對齊,內臂長度為 500 mm,外臂長度為 400 mm,徑向間隙d擬定為 1 mm。模型軸向方向向左為z軸正方向,在內臂左端沿y軸負方向施加 30 kN 的力,如圖 5 中空心箭頭所示。

圖5 簡化后的機械臂 ADAMS 模型Fig.5 Simplified ADAMS model of robotic arm
首先將圖 2 中各關鍵點的理論位置映射于圖 5 中的 ADAMS 模型,即可確定各關鍵點在模型中的位置和編號。圖 5 中各向上箭頭的位置即為關鍵點的坐標,關鍵點的位置和編號如表 1 所列。把雙邊接觸函數中的各關鍵點名稱替換為此仿真試驗中的關鍵點編號,即可確定此仿真試驗中關鍵點C、B在x、y軸方向上的雙邊接觸函數。
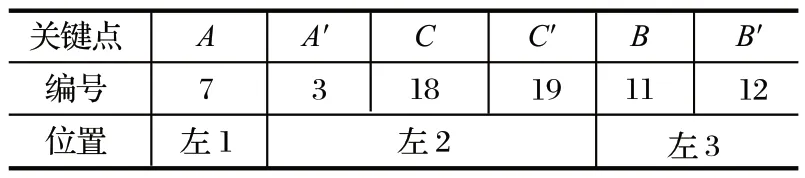
表1 關鍵點編號和位置Tab.1 ID and location of key points
確定了 ADAMS 模型并建立雙邊接觸函數后,就可以對雙邊接觸函數進行驗證。首先是將圖 5 中的模型參數代入式 (3),對各關鍵點的運動軌跡進行計算。根據模型可知d=1 mm,LAC=100 mm,LAB=500 mm。現假定內臂以 10 mm/s 的速度抽出,即可得到LCC′相對于時間t的變化方程

將上述參數代入式 (3) 可得關鍵點A、B、C在y軸方向上的理論運動軌跡

然后在 ADAMS 中對內臂上的關鍵點C、B利用雙邊接觸函數進行約束,并對內臂施加z軸正方向 10 mm/s 的驅動,得到關鍵點A、B、C在y軸方向上的運動軌跡。
最后將 ADAMS 中關鍵點A、B、C的運動軌跡導出并與計算值進行對比,如圖 6 所示。
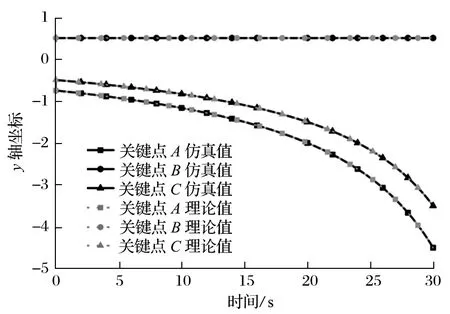
圖6 內臂關鍵點的運動軌跡Fig.6 Motion trajectory of key points on inner-arm
由圖 6 可以看出,各關鍵點運動軌跡的仿真值和理論值基本相同,其相對誤差如圖 7 所示。相對誤差的最大值出現在關鍵點C的初始階段,為 0.054%,由于雙邊接觸函數對關鍵點的約束并非剛性約束,在仿真初期內臂上關鍵點沖擊約束邊界而引起的輕微震動,整體誤差很小,可以認為雙邊接觸函數能夠很好地模擬機械臂各臂節間的配合間隙。
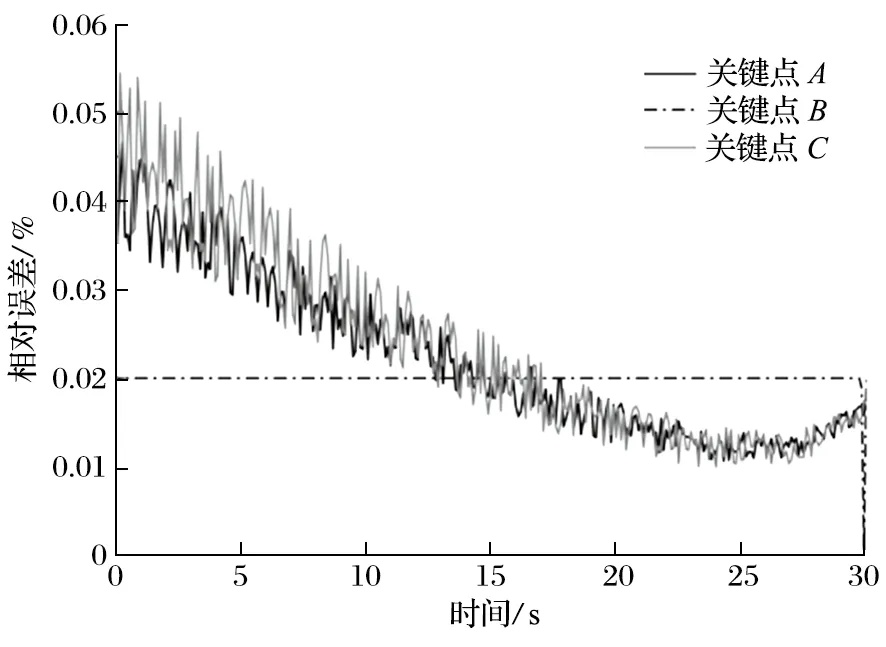
圖7 仿真值與理論值的相對誤差Fig.7 Relative error between simulated values and theoretical ones
2.2 液壓重載機械臂的 ADAMS 模型
在驗證了利用雙邊接觸函數模擬配合間隙的可靠性后,便可將其應用于伸縮式液壓重載機械臂上,研究配合間隙對機械臂定位精度的影響。
伸縮式液壓重載機械臂的 ADAMS 模型如圖 8 所示。其中一、二、三段機械臂分別稱為內臂、中臂和外臂。各臂節間有液壓缸相互連接提供驅動力,外臂右端連接底座,用于支持機械臂的抬起和旋轉。

圖8 液壓重載機械臂 ADAMS 模型Fig.8 ADAMS model of hydraulic heavy-load robotic arm
2.3 機械臂上關鍵點和接觸函數的建立
依照液壓重載機械臂的基本結構,對各臂節上的關鍵點進行定位。定義內臂的 3 個關鍵點為A1、B1、C1,中臂的 3 個關鍵點為A2、B2、C2,外臂的 2 個關鍵點為A3、B3。各關鍵點的位置和編號如表 2 所列。

表2 機械臂上關鍵點的編號和位置Tab.2 ID and location of key points on robotic arm
確定了各關鍵點的編號信息,就可以確定各關鍵點的雙邊接觸函數。將關鍵點的編號代入雙邊接觸函數待定式中即可得到各點的接觸函數,其中機械臂的軸向方向為x軸。
內臂上關鍵點B1在y、z方向的雙邊接觸函數分別為:
BISTOP(DY(85,87,87),VY(85,87,87,87),-d/2,d/2,1e8,1.5,1e3,1e-10);
BISTOP(DZ(85,87,87),VZ(85,87,87,87),-d/2,d/2,1e8,1.5,1e3,1e-10);
內臂上關鍵點C1在y、z方向的雙邊接觸函數分別為:
BISTOP(DY(84,96,96),VY(84,96,96,96),-d/2-(d/DX(96,85,85))*DX(84,96,96),d/2+(d/DX(96,85,85))*DX(84,96,96),1e8,1.5,1e3,1e-10);
BISTOP(DZ(84,96,96),VZ(84,96,96,96),-d/2-(d/DX(96,85,85))*DX(84,96,96),d/2+(d/DX(96,85,85))*DX(84,96,96),1e8,1.5,1e3,1e-10);
中臂上關鍵點B2在y、z方向的雙邊接觸函數分別為:
BISTOP(DY(87,89,89),VY(87,89,89,89),-d/2,d/2,1e8,1.5,1e3,1e-10);
BISTOP(DZ(87,89,89),VZ(87,89,89,89),-d/2,d/2,1e8,1.5,1e3,1e-10);
中臂上關鍵點C2在y、z方向的雙邊接觸函數分別為:
BISTOP(DY(86,88,88),VY(86,88,88,88),-d/2-(d/DX(88,87,87))*DX(86,88,88),d/2+(d/DX(88,87,87))*DX(86,88,88),1e8,1.5,1e3,1e-10);
BISTOP(DZ(86,88,88),VZ(86,88,88,88),-d/2-(d/DX(88,87,87))*DX(86,88,88),d/2+(d/DX(88,87,87))*DX(86,88,88),1e8,1.5,1e3,1e-10)。
各接觸函數中的d為機械臂間的配合間隙,此處待定。
2.4 不同配合間隙對定位精度的影響
在得到了各關鍵點的雙邊接觸函數后,即可將其代入 ADAMS 模型中,對各關鍵點進行約束。為研究不同配合間隙對液壓重載機械臂定位精度的影響,將配合間隙d分別取 0.5、1.0、1.5、2.0、2.5 mm,并在內臂左端即關鍵點A1的位置施加一個y軸負方向 30 kN 的載荷。
對機械臂的運動過程進行設定:首先將內臂和中臂各向外伸出 900 mm,并整體向下轉動 7°來模擬抓取的過程;然后將機械臂整體向上轉動 37°,沿y軸順時針轉動 30°,再向下轉動 37°來模擬放置物體的過程;最后內臂和外臂收縮,機械臂整體轉動,恢復至初始狀態。各運動過程所對應的時間如表 3 所列。

表3 機械臂運動時間設定Tab.3 Motion time settings of robotic arm
配合間隙d分別取 0.5、1.0、1.5、2.0、2.5 mm 時,將機械臂左端點即關鍵點A1(編號 105) 的x、y、z軸運動軌跡與不考慮配合間隙時的運動軌跡進行對比,偏差量如圖 9 所示。圖中,橫坐標為時間,縱坐標為定位偏差量。各曲線名稱由坐標加配合間隙下角標組成,如x0.5為配合間隙 0.5 mm 時,關鍵點A1在x軸方向上的偏差量。x、y、z軸的偏差量分別對應直線、劃線、點劃線。

圖9 不同配合間隙的定位偏差Fig.9 Positioning deviation at various fit clearance
由圖 9 可以看出,y方向即 30 kN 載荷的方向偏差量最大,其次是x方向即機械臂軸向,而z方向偏差量最小。選取運動過程中機械臂左端點在各坐標方向上的最大偏差量,繪制偏差量β隨配合間隙d變化的擬合曲線,如圖 10 所示。圖 10 中,x、y、z方向和總定位偏差β隨配合間隙d變化的擬合函數均為正比例函數,斜率分別為 2.60、5.35、1.29 和 6.09,且擬合曲線的R2均大于 0.999,說明擬合效果很好。
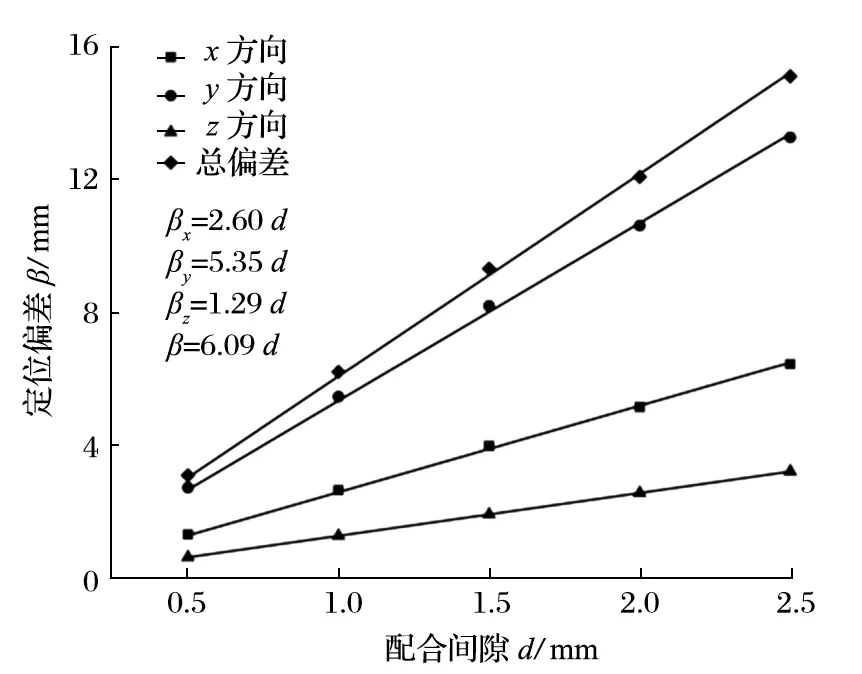
圖10 偏差量隨配合間隙變化曲線Fig.10 Variation curve of deviation with fit clearance
由圖 10 可以看出,即使機械臂臂節間的配合間隙僅有 0.5 mm,也會使機械臂最前端的定位誤差大于 3.0 mm。而當配合間隙增大至 2.5 mm 時,機械臂最前端的定位誤差達到 15.0 mm,且該定位誤差會隨著配合間隙的增大,以大于配合間隙 6 倍的速度正比例增大。
3 結論
通過理論推導和 ADAMS 仿真試驗,對機械臂在工程作業時的間隙進行了研究,得出結論如下。
(1) 機械臂內外臂存在配合間隙時,內臂上 3 個關鍵點隨配合間隙和伸縮量變化時的運動軌跡方程。
(2) 建立了用于約束內臂關鍵點的雙邊接觸函數,并驗證了該函數模擬配合間隙時的可靠性。
(3) 液壓重載機械臂最前端的定位誤差與臂節間的配合間隙成正比例函數,很小的配合間隙也能夠導致機械臂出現較大的定位誤差。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
