多段速無人駕駛畜舍飼料運輸車系統(tǒng)設計
2022-05-25 01:57:52胡望琴
技術與市場 2022年5期
關鍵詞:變頻器
胡望琴
(江西新能源科技職業(yè)學院,江西 新余 338000)
0 引言
可編程邏輯控制器PLC和變頻器在畜牧業(yè)養(yǎng)殖領域的推廣應用,能夠大大提升養(yǎng)殖作業(yè)的自動化程度。通過將西門子S7-200PLC與MM420變頻器結合起來,設計多段速畜舍飼料運輸系統(tǒng),意在減少人畜接觸的頻率,提升養(yǎng)殖作業(yè)生產(chǎn)的安全性和可靠性。系統(tǒng)的總體結構設計、硬件設計、軟件設計等闡述如下。
1 總體結構設計
畜舍飼料運輸車結構如圖1所示:車長1.5 m,寬度1.3 m,高度1.2 m。由于采用全自動無人駕駛設計,因此應用履帶式機械動力結構,以提升整車運行的穩(wěn)定性。系統(tǒng)總體結構主要由傳感器模塊、控制器模塊、動力模塊組成,其中傳感器模塊由壓力傳感器、紅外傳感器構成,可實現(xiàn)對整車畜舍飼料容量及車輛運行位置2項數(shù)據(jù)的采集;控制器模塊由PLC、變頻器構成,可通過編程和參數(shù)設置,實現(xiàn)無人駕駛狀態(tài)下畜舍飼料的多段速自動運輸控制;動力模塊由三相減速異步電機、驅動輪、履帶裝置構成,提供整車運行的動力源。

1—驅動輪;2—控制器;3—紅外傳感器;4—壓力傳感器;5—避震器;6—飼料存儲箱。
2 硬件設計
2.1 電氣硬件設計
系統(tǒng)電氣接線如圖2所示,根據(jù)多段速無人駕駛運送畜舍飼料的控制要求,選用S7-200型PLC為硬件控制核心,聯(lián)合紅外傳感器、壓力傳感器、按鈕開關、MM420變頻器、三相減速異步電機等設備,構建電氣硬件系統(tǒng):①硬件輸入端。I0.0為低速啟動開關SB1,I0.1為中速啟動開關SB2,I0.2為系統(tǒng)停止開關SA,I0.3為運輸車A側紅外傳感器,I0.4為運輸車B側紅外傳感器,I0.5為運輸車內(nèi)置壓力傳感器,I0.6為高速啟動開關SB3。②硬件輸出端。Q0.0、Q0.1、Q0.2分別接MM420變頻器數(shù)字端口DIN1、DIN2、DIN3。③變頻器端:MM420變頻器輸入端經(jīng)空氣開關與三相交流電源連接,輸出端分別連接三相減速異步電機的3個輸入端。

圖2 畜舍飼料運輸車電氣接線圖
2.2 工作原理
系統(tǒng)工作原理:在起點A位置,操作人員往車中裝滿飼料,按下啟動按鈕后,車輛沿直線向畜舍B點運輸飼料,當B側傳感器檢測到運輸車到達B點后,車輛自動暫停,B側擋板自動打開卸料,當所有飼料卸完,壓力傳感器置0,車輛重新沿直線方向返回A位置,當A側傳感器檢測到運輸車到達A位置后,車輛自動停止,等待操作人員再次裝料。裝滿飼料后,由操作人員再次按下啟動按鈕,車輛重新運送飼料至畜舍端,實現(xiàn)循環(huán)往復送料作業(yè)。
此外,本系統(tǒng)設置高速(30 Hz)、中速(20 Hz)和低速(10 Hz)三個選擇按鈕,操作人員可結合飼料運輸距離、時間、總量等需求,在操作面板上選擇不同的速度模式,實現(xiàn)多段速無人駕駛運輸飼料功能,確保以最優(yōu)的運輸方式完成飼料運輸計劃任務。以低速運輸模式為例,操作人員在A位置啟動開關SB1,運輸車自A位置以10 Hz頻率向B位置運輸飼料,到達B位置完成卸料后,再以-10 Hz頻率返回A位置。
3 軟件設計
3.1 變頻器參數(shù)設計
變頻器參數(shù)設計如表1所示。結合控制需求,在MM420變頻器P1001~P1006地址位上分別輸入表中的數(shù)據(jù),各數(shù)據(jù)對應三相異步減速電機正轉、反轉的不同頻率,進一步通過編寫PLC梯形圖高速、中速、低速、正反轉切換系列程序,實現(xiàn)對變頻器DIN1~DIN3端子的數(shù)字化控制,達到多段速無人駕駛運輸畜舍飼料的控制目標。
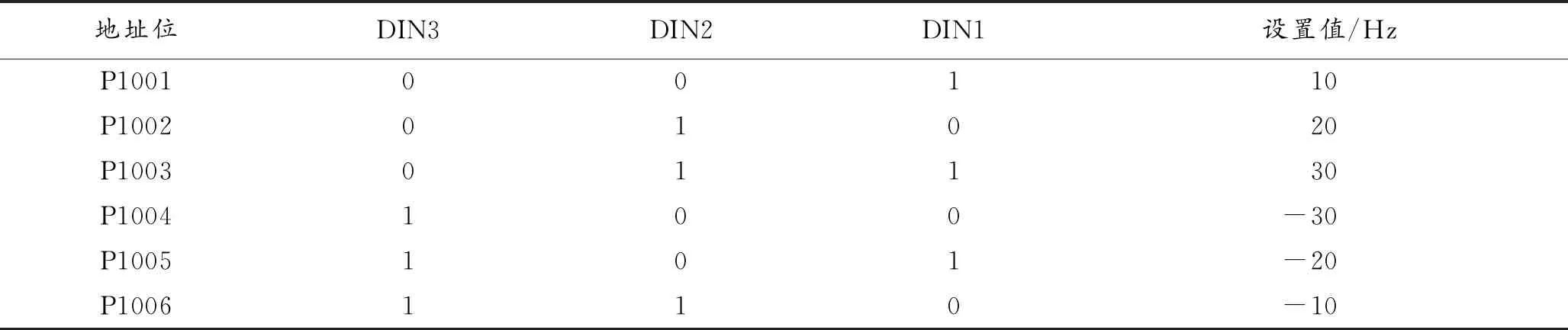
表1 變頻器參數(shù)設置表
3.2 PLC程序設計
以低速自動運輸畜舍飼料為例編訂梯形圖程序段,如圖3所示。程序編譯執(zhí)行的思想為:①操作人員往車中裝滿飼料后,I0.5置1,此時按下低速啟動按鈕SB1,Q0.0被置1,運輸車以10 Hz低速自動啟動,由A位置向B位置行駛。②當車輛到達B位置后(畜舍地點),B側傳感器I0.4置1,M0.0輸出高電平,車輛自動停止。③車輛停在畜舍地點,B側擋板打開自動卸料,當所有飼料卸完后,DIN2和DIN3置1,變頻器進入低速運行狀態(tài),帶動三相異步電動機以-10 Hz頻率運行,車輛自動返回A位置。④當A側傳感器I0.3置1時,表明車輛返回至A位置,DIN2和DIN3清0,車輛自動停止,等待操作人員重新裝料。中速、高速運輸飼料的程序編譯以此類推。

圖3 低速運料程序段
4 結語
采用多段速無人駕駛的方法實現(xiàn)畜舍飼料往返運輸,不僅實現(xiàn)了零接觸運輸畜類飼料的功能,還實現(xiàn)了多選擇速度控制自動運料的目的,體現(xiàn)了系統(tǒng)設計的人性化、功能多樣化和自動化,理論分析和程序設計體現(xiàn)了本系統(tǒng)應用的可行性和實用價值,可在農(nóng)業(yè)生產(chǎn)中推廣應用。
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
