甜菜撿拾機研究現狀及展望
2022-05-27 06:16:24李建東譚北雁劉赟東
農業工程 2022年2期
關鍵詞:作業
王 佐,王 飛,王 楠,李建東,譚北雁,劉赟東
(1.內蒙古自治區畜牧工作站,內蒙古 呼和浩特 010010; 2.中機美諾科技股份有限公司,北京 100083;3.現代農裝科技股份有限公司,北京 100083)
0 引言
甜菜是我國僅次于甘蔗的糖料作物,廣泛種植在北方各地[1]。現階段,甜菜收獲機利用率低、人工作業多、勞動力需求巨大、生產效率低下且經濟效益低。甜菜收獲機型的落后,影響了甜菜種植行業的健康快速發展,亟待研制出一種高效、低損、智能的甜菜撿拾機[2]。為更好地服務甜菜種植行業,本文介紹了甜菜撿拾機械收獲現狀,有助于研究和發展國內甜菜收獲機械。
1 國內外發展現狀
聯合收獲方式和分段收獲方式是甜菜收獲兩種主要形式,其中甜菜撿拾機用于分段作業,聯合收獲機用于聯合作業。
1.1 國外發展現狀
國外較早就對甜菜聯合收獲機械進行了研究,目前機械化水平高,普遍以聯合收獲為主,分段收獲較少。聯合收獲機械可以完成從挖掘到清理裝載等一系列工序,代表產品有德國格立莫(GRIMME)公司的REXOR 620型甜菜收獲機(圖1)、德國荷馬(HOLMER)公司的Terra Dos T4-40型甜菜收獲機和法國奠羅(MOREAu)公司AC3S型甜菜收獲機[3-5]。甜菜撿拾機械代表機型有西班牙馬賽(MACE)公司生產的RT307型甜菜撿拾裝車機、RT310型甜菜撿拾裝車機和RT314DL型甜菜撿拾裝車機(圖2)。RT314DL型甜菜撿拾裝車機收獲作業時,甜菜通過撿拾板撿拾起來后,被送到星狀輪清除雜質,再通過提升機構運送至車箱,最后被運送帶卸載到運輸車上,完成撿拾作業。該撿拾機可靠性高、操作方便簡單、甜菜破損率低、適應能力強,可滿足復雜情況下作業,有大容量的車載車箱,能夠減少運輸時間,提高收獲效率。缺點是價格高昂,投資較高;機器體積較大,不適合在小地塊進行收獲作業;維修成本高,維修人員專業性高[6]。

圖1 格立莫GRIMME REXOR 620型甜菜收獲機Fig.1 GRIMME REXOR 620 beet harvester

圖2 馬賽MACERT314DL型甜菜撿拾裝車機Fig.2 MACERT314DL beet picking and loading machine
1.2 國內發展現狀
國內甜菜收獲機械多為分段收獲方式,聯合收獲機械較少。甜菜聯合收獲機價格高昂、維護不方便、維護成本較高、體積較大,不適合我國小地塊生產模式。分段收獲機具有價格便宜、易操作、維護簡單方便等特點,更適合我國現階段下的小地塊生產模式需求[3-4]。分段收獲方式按機具完成收獲工序情況可分為兩段收獲和3段收獲。其中兩段式收獲是一臺機器完成打葉、切頂、挖掘工序,另一臺機器完成撿拾、清理、集運工序。3段收獲方式是將收獲過程分為3步完成:第1步完成甜菜打櫻、切頂工序;第2步完成挖掘、集條工序;第3步完成撿拾、輸送工序,同時清除雜質[3-5]。甜菜撿拾機械在兩段收獲和3段收獲中都有應用,是分段收獲的關鍵機器。
劉鳳勇[7]發明了一種甜菜撿拾去土升運機。此機器通過撿拾齒撿拾甜菜,再將甜菜運送到螺旋去土輸送輥裝置,完成輸送和去土工序,最后完成甜菜升運收集工作。
劉鳳勇[8]發明了一款甜菜集箱與直卸組合式撿拾收獲機。此機型擁有一個甜菜箱,可實現邊撿拾甜菜邊卸載到集運車,集運車滿車后,收獲機可以繼續撿拾甜菜,將甜菜收集到甜菜箱內保存,當集運車返回后再卸載到集運車,如此反復。當甜菜箱裝滿后,收獲機停止前進,將甜菜箱內的甜菜卸載。此收獲方式節省時間,提高了作業效率。
烏魯木齊億能達機械制造有限公司[9]研發了一款新型甜菜撿拾機。該機通過仿形集攏靴將集成一條的甜菜塊莖進一步集中起來,再經過撿拾裝置、輸送裝置及清土裝置,到達升運卸料裝置,完成卸料。
王輝[10]發明了一款自撿式甜菜裝載機。工作時,甜菜被刮地板鏟起,再經撿拾輸送帶送到車箱內。此機型特點是有3個車箱,能夠實現不間斷輸送裝車,中部車箱內安裝有攤平攪攏,使甜菜平整分布在車箱內。此機器也能夠撿拾土豆等作物。
焉耆縣天成農業機械制造有限公司[11]研發了一款甜菜撿拾裝車機,依靠撿拾輸送鏈帶耙將甜菜撿拾起來,再經輸送帶送到除草輥,除草后由裝車輸送帶完成裝車。此機型也可以撿拾土豆等作物。
常州漢森機械有限公司[12]研制了一款甜菜聯合撿拾裝卸一體機——漢美4TJ-140型甜菜聯合撿拾裝卸機(圖3),該機工作原理和西班牙馬賽甜菜撿拾機基本相同。此機操作簡單、價格便宜、性能可靠、售后服務快、維修方便、輸送平緩,能減少對甜菜的損傷[6]。

圖3 漢美4TJ-140型甜菜聯合撿拾裝卸機Fig.3 Han Mei 4TJ-140 beet combine picking and handling machine
新疆文彥高科機電設備有限公司[13]研發了一款甜菜挖掘撿拾收獲機。收獲時,利用撿拾犁將甜菜挖掘出來,隨后進入清料旋轉盤,清土后輸送到收集箱。
新疆文彥高科機電設備有限公司[14]研發了一種甜菜挖掘撿拾清雜收獲機,此機型對上一代機型進行了升級。清料旋轉盤由單級改為多級,提高了除土率。提升輸送機改為循環式,提高了輸送效率。
新疆文彥高科機電設備有限公司[15]研發了一款舉升式甜菜挖掘撿拾收獲機。此機型和上一代機型相比,在撿拾犁和清料旋轉盤之間設置了導料桿,在收集箱上部設置了布料攪攏,收集箱底面可以在舉升油缸的作用下升起,將甜菜卸出。
酒泉科德爾農業裝備科技有限責任公司[16]研發了一種自走式甜菜撿拾裝載機。工作時,鏟料板進入土壤,甜菜通過撿拾軸上的撿拾桿翻轉到傳送帶,輸送到儲料斗,儲料斗下方設置有壓力傳感器,可以檢測儲料斗質量,防止甜菜溢出。
池忠福[17]發明了一款自走式多用收獲撿拾機。此機器結構主要包括前割臺、輸送帶和料倉。此機型最大特點是能夠實現多種作物收獲,不僅能夠撿拾甜菜,也可以撿拾紅薯、馬鈴薯、石頭和殘膜等,還可以收獲花生、大蒜。
中機美諾科技股份有限公司[18]研發了一款自帶集果箱的甜菜撿拾裝載機,可以完成甜菜果實拾起、除土、集箱和卸載等功能。甜菜通過組合式撥盤在離心力作用下,能更好地清除泥土和夾雜物。
泉州耐博進出口貿易有限公司[19]研發了甜菜采收用撿拾機。收獲時,撿拾機利用吸力將甜菜吸入機器內,機器內安裝防塵網和濾網對塵土進行過濾,最后輸送機構將甜菜運送到儲料箱內。
安徽鑫洋機電有限公司[20]研制了一款甜菜撿拾裝卸機。工作時,撿拾機構將甜菜撿起,經輸送清理機構輸送清土,由提升機構送入車箱內,裝滿后通過卸料機構卸載。
2 撿拾機械工作原理
目前,甜菜撿拾方式有兩種:一種是分段收獲下經過挖掘集條后,用甜菜撿拾機撿拾甜菜;另一種是聯合收獲下經過一系列工序直接完成甜菜收獲。現階段,甜菜挖掘打葉切頂機與撿拾機搭配作業方式在我國普遍生產使用,具有簡單靈活的特點,相對而言更適合我國現階段農業生產需要。而聯合收獲作業方式則更適合在較大農田地塊中,且聯合收獲機的體積較大,也不適合在小地塊中進行收獲作業。但隨著國家對農村土地政策的不斷改進,甜菜的規模化經營將成為未來的發展趨勢。
甜菜撿拾裝卸機主要包括車架、撿拾機構、提升機構、輸送機構和卸料機構。其中,車架設置有行走裝置和車箱;撿拾機構安裝在車箱下部,包含撿拾架、旋轉指盤和柵欄;提升裝置是一個環形提升鏈,安裝在車箱后部,環形提升鏈帶動甜菜隨其旋轉上升,甜菜到達頂部位置時掉落到車箱內;輸送機構位于車箱內,輸送機構是一個攪攏軸,攪攏軸上附帶有攪攏葉片,攪攏軸縱向安裝在車箱內,連接提升機構和卸料機構;卸料機構位于車箱一側,包括卸料框架和推動裝置。
撿拾機構將集條后的甜菜撿拾后,送到旋轉指盤清理雜物,除土后的甜菜由提升裝置帶動旋轉運送到車箱頂部,由于重力作用落入車箱中,車箱中的輸送機構攪攏軸轉動,甜菜通過攪攏葉片的轉動運送到車箱前端,到達卸料裝置,甜菜再通過卸料機構卸載。甜菜撿拾裝卸機通過采用撿拾架裝置、旋轉指盤裝置、環型提升鏈裝置和攪攏軸式輸送機構,可以完成甜菜從撿拾到收集一系列工序。其中,撿拾架和旋轉指盤的組合作業方式撿拾效果好、除土效果好、攜帶雜質少和雜草纏掛少。
3 關鍵技術
3.1 撿拾技術
甜菜撿拾機在田地中撿拾的是挖掘后集成條的甜菜,撿拾架(圖4)將集成一條的甜菜撿拾起來并輸送到旋轉指盤和柵欄之間[20]。經挖掘后地表土壤比較疏松,撿拾機構能夠根據田地土壤狀況、甜菜分布情況等因素進行調整,確保甜菜全部撿拾,還要盡量減少甜菜攜帶的土壤及雜質,同時減少甜菜撿拾過程中的損傷率,并盡可能地降低撿拾阻力,減少牽引拖拉機的燃油消耗[21-23]。
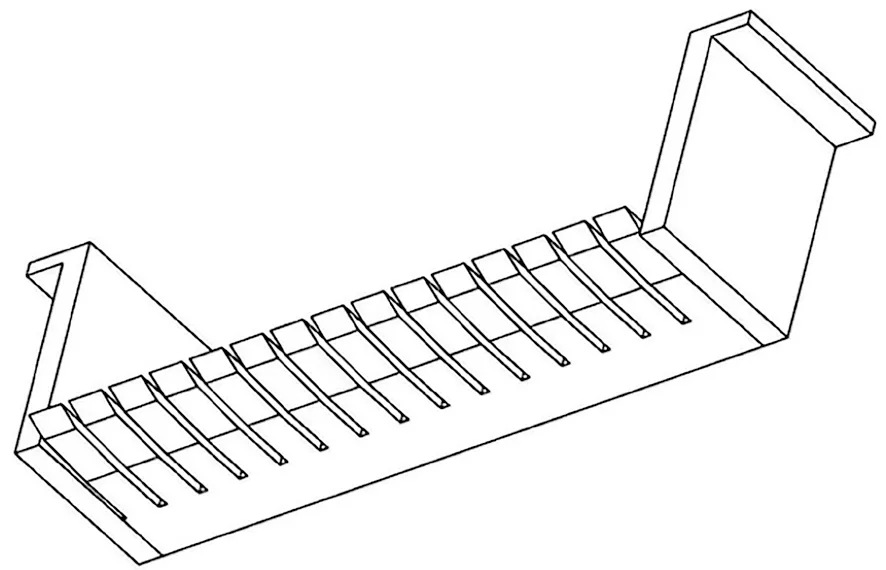
圖4 撿拾架Fig.4 Pickup rack
收獲作業時,甜菜撿拾機撿拾板進入土壤中,帶動甜菜沿板面斜向上移動,甜菜間雜質通過板面縫隙下漏。液壓桿能夠改變撿拾架的入土角度和旋轉指盤的接地面積,以實現大幅度提高甜菜撿拾機的分離效率和損傷率,同時降低對撿拾機的阻力[20-21]。
3.2 土塊分離技術
甜菜通過撿拾架上升進入兩個前后排列的旋轉指盤(圖5)。旋轉指盤由多個金屬桿構成,各金屬桿之間有間隙,可以去除大量泥土雜質,旋轉指盤周圍有環型柵欄,防止甜菜甩出[20]。收獲時,旋轉指盤帶動甜菜轉動,產生離心力和摩擦力,實現清理泥土和雜質,并在柵條空隙處將泥土和雜質甩出,以達到甜菜和土壤分離的目的[24]。

圖5 旋轉指盤Fig.5 Rotating finger disk
3.3 提升技術
甜菜通過旋轉指盤除土后進入提升機構(圖6)[20]。提升機構安裝在車箱后部,提升機構包括處于撿拾機車箱尾部的環型提升鏈,以及驅動組合輪組,用于驅動提升鏈轉動。在提升鏈裝置的內壁每隔一定距離安裝有對甜菜進行提運的粑齒裝置,粑齒結構一端固定在提升鏈上,另一端呈彎曲狀,可以防止甜菜掉落。甜菜進入提升機構后,在提升鏈內壁的粑齒結構帶動下上升,到達頂部后,甜菜由于重力作用掉落在車箱內。

圖6 提升機構Fig.6 Lifting mechanism
3.4 輸送技術
輸送機構是用于輸送的攪攏軸(圖7),攪攏軸表面焊接著攪攏葉片,軸在液壓馬達的帶動下轉動,可以帶動甜菜向車箱前端運動[20]。攪攏軸在甜菜輸送過程中有合適的轉速,保證甜菜向前運輸的同時,也不會被離心力甩出和損傷。甜菜的大小不一,因此需要一個合適的葉片間距,攪攏葉片間距在保證甜菜有效輸送的基礎上,也要減少甜菜損傷率。

圖7 攪攏軸Fig.7 Stirring shaft
3.5 卸載技術
卸料機構(圖8)是在車箱內甜菜裝滿后,將甜菜卸載的裝置[12]。卸料鏈上安裝有和卸料鏈一起運轉的卸料爪,卸料爪通過焊合板焊接在回轉卸料鏈一周,能有效抓附甜菜;卸料框架上端安裝有驅動軸,能夠帶動回轉卸料鏈運轉,可以根據甜菜情況改變輸送速度;卸料框架下方設置有張緊裝置,張緊裝置能夠張緊回轉卸料鏈,使卸料鏈更好地運轉。甜菜卸載時,甜菜被卸料爪帶動運輸,實現卸載。
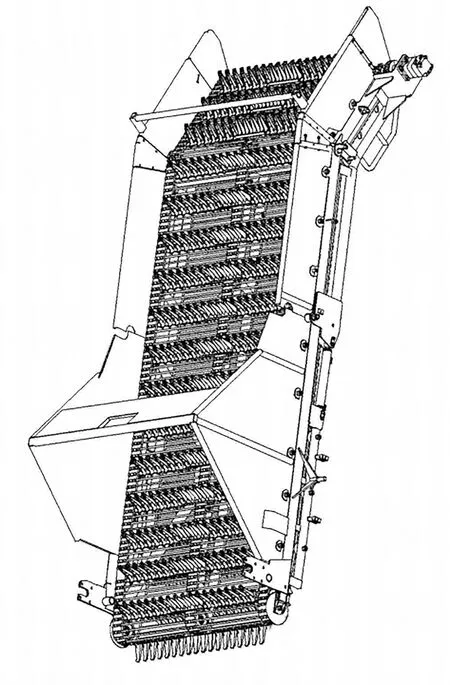
圖8 卸料機構Fig.8 Shedding mechanism
4 存在的問題及發展趨勢
4.1 存在的問題
目前國內甜菜撿拾機仍以小型化為主,去土除雜效果與作業速度負相關,行走速度較低時才能獲得較好的去土效果,收獲效率不高,僅僅實現了替代人工作業,自動化、智能化程度、技術含量仍較低,還有較大的發展空間。甜菜撿拾屬于甜菜分段收獲的重要環節,分段收獲只是實現甜菜收獲機械化的過渡手段,環節過多使得目前我國甜菜生產成本較高,經濟效益差,嚴重影響農民的生產積極性,聯合收獲是必然趨勢[25-26]。
4.2 發展趨勢
(1)提高甜菜撿拾機械的自動化程度。由于甜菜種植各地區土壤性質不相同,甜菜的大小有差異,僅僅依靠機械結構很難完全滿足機械在各種復雜情況的作業要求。通過現代化的自動控制技術、傳感器技術、液壓技術的應用,可以實現撿拾機在不同作業環境情況調整撿拾板入土深度、角度和旋轉指盤速度,實現撿拾機對不同情況下甜菜收獲的適應,進而減少甜菜損傷率,提高生產率,增加效益。
(2)提高甜菜撿拾機械的智能化程度。甜菜撿拾機械可以增加智能識別測控功能,在甜菜撿拾過程中能夠實現撿拾板自動對行,并實時檢測甜菜大小和產量等信息,實現精準農業技術;在撿拾時能夠使用傳感器監測甜菜和土壤情況,進而提升撿拾板精確入土深度;運用聲波探測技術、視覺識別技術,能夠準確識別甜菜中的土石塊等雜物,進而幫助分離裝置有效去除雜物[22]。
(3)應用無人駕駛技術。甜菜撿拾機搭載GPS導航系統及巡航系統,可以實現撿拾機的自動駕駛、轉向和對行等操作,自主完成甜菜撿拾、運輸和卸載等工序。無人操作技術可以解放勞動力,減少勞動成本,提高效益,收獲甜菜不受白天和黑夜的影響,有利于搶占農時,提高撿拾收獲效率。
5 結束語
近年來,我國甜菜收獲仍以分段收獲方式為主,甜菜撿拾機應具備撿拾、去土、提升、輸送和卸載功能。在研究和學習國外先進甜菜收獲技術和裝備的基礎上,國內甜菜撿拾機生產企業研發了多種多樣的、適應我國甜菜收獲國情的甜菜撿拾機。國產甜菜撿拾機的普及提高了我國甜菜收獲的效率,減輕了勞動強度,大大提高了我國甜菜收獲機械化水平,促進了甜菜種植業的發展。今后,加速甜菜撿拾機的自動化、智能化發展有望進一步提高甜菜收獲效率,降低糖料生產成本,促進制糖產業健康發展。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08