四旋翼無人機滑模變結構控制
2022-05-30 15:43:24許靖靳宇星楊永春
電腦知識與技術 2022年10期
許靖 靳宇星 楊永春


摘要:針對四旋翼無人機飛控系統中傳統的PID控制算法響應速度慢、控制精度低以及魯棒性不夠強的問題,通過采用滑模變結構的控制算法取代了傳統的PID控制算法,增強了系統的控制精度和響應速度。由于無人機在飛行過程中容易受到各種外界環境因素的干擾,因此采用積分滑模的控制策略來提升飛控的抗干擾能力。同時考慮到四旋翼無人機固有的欠驅動性,將無人機控制系統分為位置子系統外環和姿態子系統內環的結構,通過內外環的控制策略可以簡化欠驅動系統控制律的設計過程。
關鍵詞:四旋翼無人機;飛控系統;內外環控制;滑模控制
中圖分類號:TP273? ? ? 文獻標識碼:A
文章編號:1009-3044(2022)10-0116-03
1 引言
四旋翼無人機具有結構緊湊、操作簡單、成本低、能夠實現垂直起降,定點懸停等功能,且對起降地形環境要求低等優點,廣泛地應用在航拍、農林植保、電力巡線、測繪以及軍事偵察等各行各業中[1]。
四旋翼無人機的飛行是通過安裝在機臂上的四個電機帶動螺旋槳的旋轉,從而實現在空間位置上的上、下以及前、后、左、右等六個自由度方向的移動。因此,四旋翼無人機系統是一個典型的欠驅動控制系統,其選用的控制策略和飛控中的控制方法是無人機飛行控制的核心。但其本身具有的非線性及欠驅動性給控制器的設計帶來了巨大的困難,同時無人機在飛行過程中易受到外界環境的干擾,如氣流、溫度、沙塵等因素,因此控制策略需要具備一定的抗干擾能力。
目前,傳統的四旋翼無人機的控制策略主要是采用PID控制[2]。PID是控制領域中一種較為簡單也是比較成熟的控制方式,經過百年時間的應用和發展,已經在工業生產的各個領域有廣泛的應用。其在四旋翼無人機的應用上也較為成熟。但傳統的線性控制如PID控制[3]、H_∞控制[4]、LQR控制[5]等策略在處理非線性問題和控制欠驅動系統時具有設計結構復雜、動態響應不足和抗干擾能力弱的缺點。因此,需要尋求一種非線性控制策略來應對欠驅動系統。其中滑模變結構控制具有響應快速,抗干擾能力強,對系統參數依賴性小的優點,用來設計四旋翼無人機的欠驅動控制能夠提高其控制性能。
2 四旋翼無人機的建模
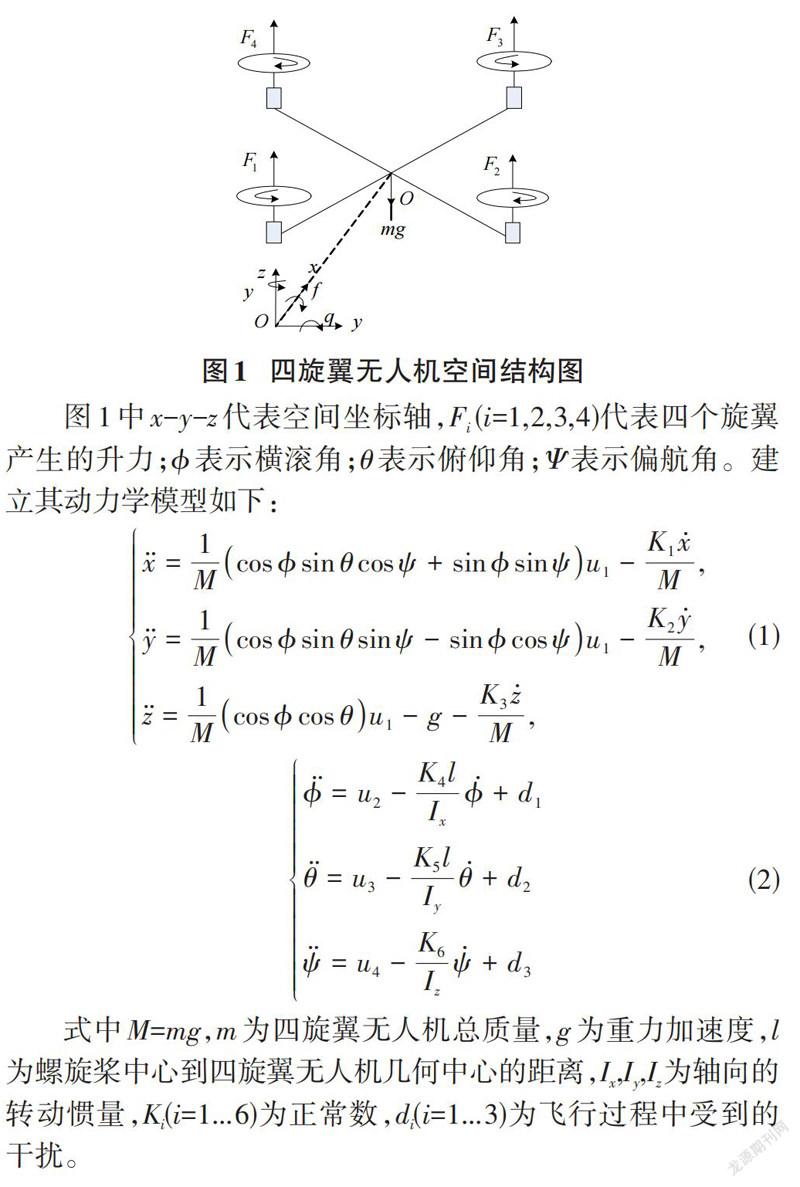
四旋翼無人機的結構是由交叉組成的四個機臂和電機構成的,常見的主要有“+”結構和“×”結構兩種[6]。本文選取“×”結構進行分析研究,其在空間坐標軸下的結構如圖1所示。
圖1中x-y-z代表空間坐標軸,Fi (i=1,2,3,4)代表四個旋翼產生的升力;?表示橫滾角;θ表示俯仰角;Ψ表示偏航角。建立其動力學模型如下:
[x=1Mcos?sinθcosψ+sin?sinψu1-K1xM, y=1Mcos?sinθsinψ-sin?cosψu1-K2yM,z=1Mcos?cosθu1-g-K3zM,]? ? ?(1)
[?=u2-K4lIx?+d1 θ=u3-K5lIyθ+d2ψ=u4-K6Izψ+d3]? ? ? ? ? ?(2)
式中M=mg,m為四旋翼無人機總質量,g為重力加速度,l為螺旋槳中心到四旋翼無人機幾何中心的距離,Ix,Iy,Iz為軸向的轉動慣量,Ki(i=1...6)為正常數,di(i=1...3)為飛行過程中受到的干擾。
針對四旋翼無人機的欠驅動特性,為避免欠驅動控制律直接設計的復雜性,采用了內外環結構設計控制律。將四旋翼無人機控制系統分為了位置子系統外環和姿態子系統內環的內外環結構來分別設計控制了,這種方法可以使得控制器的設計更為簡單可靠。系統的設計結構圖如圖2所示。
3 四旋翼無人機控制律設計
3.1 位置控制律設計
由無人機數學建模式(1)可以看出其在x-y-z空間位置方向有三個自由度,但卻只有一個獨立的控制變量,因此需要進行解耦控制。分別沿x-y-z軸方向構造如下函數:
[u1x=1Mcos?sinθcosψ+sin?sinψu1u1y=1Mcos?sinθsinψ-sin?cosψu1u1z=1Mcos?cosθu1]? ? ? ?(3)
將式(3)帶入無人機動態模型式(1)可得:
[x=u1x-K1xM, y=u1y-K2yM,z=u1z-g-K3zM,]? ? ? ? ?(4)
針對式(4)為使系統的跟蹤誤差能夠快速準確地收斂到零,采用滑模控制律來設計該控制系統,并取x-y-z軸方向的三個誤差函數如下:[ex=xd-x],[ey=yd-y],[ez=zd-z]。同時,為提高系統的控制精度采用積分滑模分別設計三個滑模函數為[sx=ex+C10texτdτ],[sy=ey+C20teyτdτ],[sz=ez+C30tezτdτ],則對以上三個滑模函數求其一階導數并將式(4) 帶入可得:
[sx=ex+C1ex=xd-u1x-K1xM+C1exsy=ey+C2ey=yd-u1y-K2yM+C2eysz=ez+C3ez=zd-u1z-g-K3zM+C3ez]? ? ?(5)
根據我國學者高為炳院士提出的滑模控制趨近律的概念,基于趨近律法的滑模變結構控制能夠有效地抑制滑模控制中的抖振問題提高誤差的收斂速度,因此選取指數趨近律[s=-ks-ηsgns],同時為進一步減小滑模控制中的抖振,用飽和函數代替控制律的開關函數,由此可設計控制律為:
[u1x=xd+K1xM+C1ex+k1sx+η1satsxu1y=yd+K2yM+C2ey+k2sy+η2satsyu1z=zd+K3zM+C3ez+k3sz+η3satsz]? ? ? ?(6)
根據李亞普洛夫方程可以驗證所設計的控制系統是穩定的。
根據四旋翼無人機的飛行指令的要求,通常情況下會給定位置指令和航向指令,因此位置控制環需要根據給定的位置和航向指令生成姿態角,因此假定滿足控制律式(6) 所需的無人機姿態角度為θd和?d,則由式(3) 可以求決出姿態環所需的給定信號,過程如下:
[u1x=u1ztanθdcosψd+u1ztan?dsinψdcosθdu1y=u1ztanθdsinψd-u1ztan?dcosψdcosθd]? ? ? ? ? (7)
進一步對式(7) 進行求解θd和?d的運算,則可以得到:
[θd=arctancosψdu1x+sinψdu1yu1z]? ? ? ? ? ? ?(8)
[?d=arctancosθdsinψdu1x-cosψdu1yu1z]? ? ? ? ? ?(9)
由此,姿態控制內環所需的給定信號θd和?d已經確定,據此位置控制律u1可設計為:
[u1=Mu1zcosψdcosθd]? ? ? ? ? ?(10)
3.2 姿態控制律設計
姿態控制律同樣采用積滑模控制來設計,設計思路和設計過程同位置控制律的設計。定義三個姿態角的誤差函數為:[e?=?d-?],[eθ=θd-θ],[eψ=ψd-ψ]。同樣選取積分滑模面如下:[s?=e?+C40te?τdτ],[sθ=eθ+C50teθτdτ],[sψ=eψ+C60teψτdτ],
則同位置控制律的設計可得姿態控制律如下:
[u2=?d+K4lIx+C4e?+k4s?+η4sats?u3=θd+K5lIy+C5eθ+k5sθ+η5satsθu4=ψd+K6lIz+C6eψ+k6sψ+η6satsψ]? ? ?(11)
同樣可根據李亞普洛夫方程驗證姿態控制系統是穩定的,姿態誤差呈指數形式快速收斂為零。
4 MATLAB仿真實驗
本文利用MATLAB仿真軟件,搭建四旋翼無人機的數學模型和所設計的控制系統。運行過程中給定相關的仿真參數如下:
四旋翼無人機機體參數給定如下:m=2,l=0.2,g=9.8;K1=K2=K3=0.01;K4=K5=K6=0.012;Ix=Iy=Iz=1.25;d1=d2=d3=0.2。
取控制器參數C1= C2= C3=0.2;C4= C5= C6=0.8;k1= k2=k3=4;k4= k5=k6=20;ηi(i=1,2,3,4,5,6)=2。移動機器人初始位置位于[2,1,0],取zd=3,θd=60°。
仿真實驗是通過位置控制器和姿態控制器,使得四旋翼無人機能過夠快速準確地跟蹤到給參考點位,仿真結果如下:
圖3給出了四旋翼無人機在仿真軟件中的位置方向的軌跡跟蹤曲線。由圖可以看出,在仿真開始后四旋翼無人機能夠快速的響應并1秒鐘之內跟蹤到給定的參考位置,說明所設計的系統能夠滿足控制要求。
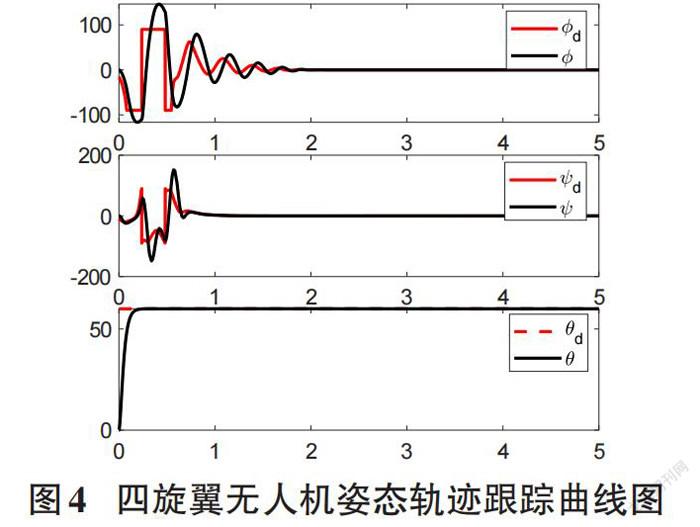
圖4給出了四旋翼無人機在仿真軟件中的姿態跟蹤曲線。紅色為給定角度和根據給定目標計算出來的參考曲線,黑色為實際運行曲線。由圖可以看出所設計的控制器能夠快速準確地跟蹤上兩個位置方向和一個角度方向的移動軌跡,確保系統的穩定運行。
5 結束語
針對四旋翼無人機控制系統,采用內外環雙閉環的控制結構,用控制性能更好的滑模變結構控制策略,取代傳統的PID控制策略。該設計方法既減小了控制器的設計難度,又提高了系統的響應能力和控制精度,同時滑模控制本省還具有很強的魯棒性,可以增強四旋翼無人機的抗干擾能力。最后在MTLAB仿真軟件中驗證了設計的正確性。
參考文獻:
[1] 張磊.基于滑模變結構控制的四旋翼無人機應用分析與研究[J].工業控制計算機,2021,34(12):73-75.
[2] 胡徐勝,鄭睿,陶彬彬.四旋翼無人機飛控系統設計與實現[J].廊坊師范學院學報(自然科學版),2021,21(4):46-50.
[3] 邵霖文,廖芳,丁黎明,等.基于MATLAB的四旋翼無人機飛控PID仿真設計[J].山西電子技術,2021(5):43-46.
[4] 丁力,李興成,馮俊萍,等.四旋翼飛行器靜態H∞輸出反饋控制[J].電光與控制,2018,25(4):41-45.
[5] 鮮斌,張旭,楊森.無人機吊掛飛行的非線性控制方法設計[J].控制理論與應用,2016,33(3):273-279.
[6] 向朝興,茅健.四旋翼無人機的旋翼空氣動力學建模與仿真[J].計算機仿真,2021,38(10):48-52.
【通聯編輯:謝媛媛】
收稿日期:2022-01-25
基金項目:新疆交通職業技術學院科研課題(項目編號:J-21-08)
作者簡介:許靖(1991—) ,女,新疆烏魯木齊人,碩士,研究方向為智能控制;靳宇星(1990—) ,男,甘肅天水人,講師,碩士,研究方向為控制理論、無人機控制;楊永春(1972—) ,女,新疆烏魯木齊人,教授,研究方向為電氣自動化。
