基于機載LiDAR與無人船多波束的水陸一體化測量技術研究
2022-06-01 00:58:50梁沖
水利技術監督 2022年6期
梁 沖
(遼寧省水利水電勘測設計研究院有限責任公司,遼寧 沈陽 110000)
傳統的水上測量方式除了運用GPS等傳統測繪技術采集地理信息外[1],傾斜攝影測量、遙感技術在水利信息化中同樣發揮著重要的作用。航空攝影測量技術作業雖然快捷靈活,但其影像數據的獲取易受天氣、測區環境、作業周期等多重因素的影響。而且,水利水電建筑設施通常分布在山區地帶,對于處在植被密集的區域,該技術無法剔除植被所帶來的影響,同時水利水電工程建設對測繪成果要求比較高,大部分需要滿足1/2000精度,部分需要滿足1/1000或1/500成果精度,如果使用傳統的人工和航空攝影測量手段很難滿足工程的精度要求。機載LiDAR技術相比其他傳統航測技術更具優勢,可以快速、有效地獲取三維空間地理信息數據。
傳統的水下測量方式主要通過有人船搭載測深儀和RTK-GPS組合測量手段或是直接人工水下測量,測量人員安全無法得到保障,而且傳統載人測量船只無法或不易到達危險、淺灘、近岸等區域,當在河谷狹窄地作業時,無法輕松完成轉向掉頭工作。由于水下被測物體不易觀測,測量過程受流速、水中障礙物等因素影響,無法準確、高效地獲取被測物空間地理位置。而無人船多波束測量技術[2]可自動化采集復雜水域下的空間三維地理數據,既可提高作業效率,也可保障人員安全。
隨著測量技術的發展,越來越多的水利行業期望進行水陸一體化測量作業,水上部分隨著機載LiDAR發展變得越來越容易,水下部分隨著多波束技術的推廣已經走進大家的視野。因此,將兩者進行有效結合,作為一種全新的水陸一體化測量手段加以應用,快速高效地完成區域范圍內水陸空間三維數據的全覆蓋。同時,也為水利工程三維設計提供基礎保障[3]。
1 機載LiDAR和無人船多波束的應用優勢分析
1.1 機載LiDAR相較于傳統航測技術的應用優勢
1.1.1數據測量方式
傳統航測測量方式屬于被動式測量,依據地物的反射情況,被動接受反射信號,自然光對其影響較大。而機載LiDAR是通過激光傳感器主動發射激光束,依據反射回來的信號,通過相應參數進行解算,相較于傳統航測方法不會受到太陽高度角的限制。因此,可以獲取更加完整的地理空間數據。
1.1.2數據采樣方式
傳統航測方法是以面狀形式進行采樣,只能獲取二維影像數據,影像質量高,平面精度優于高程精度。而機載LiDAR將點、面兩種采樣方式進行了結合,激光逐點高密度采樣獲取三維點云數據,數碼相機面狀采集二維影像數據。機載LiDAR采用更加高效的數據獲取方式且高程精度更優。
1.1.3植被穿透性強
當測量植被茂密的高山峽谷地帶時,傳統航測方法無法剔除植被帶來的影響,當植被之間重疊嚴重時,無法獲取地面地形數據。機載LiDAR利用激光多次回波技術,可以較好地穿透植被間的縫隙,進而探測到樹下真實三維地形,精確建立真實的地面高程模型。
1.1.4外業測量和內業處理方式
在進行外業測量時,傳統航測方法需要布設大量地面控制點,無法在地形復雜、險峻地區大量作業。而基于機載LiDAR技術進行測量時,僅需布設少量地面基站,供后期差分處理。在進行內業處理時,傳統傾斜攝影測量技術需要經過大量外控和內業處理手段,才能獲取地面三維信息。機載LiDAR利用其POS定位定姿系統,通過解算直接獲取三維點云數據。
1.2 無人船測量系統相較于傳統水下測量的應用優勢
1.2.1安全系數高
在很多環境復雜未知的水域或近岸淺水水域,采用有人船或人員水下測量時,由于在水下會存在很多不確定因素,會對人員的人身安全造成極大的風險。而采用無人船進行水下測量作業時,工作人員無需下水就可以完成作業,安全系數有效提高。
1.2.2重量輕,吃水淺
在很多高山峽谷地帶進行測量時,山路崎嶇難走,無法將有人船只運輸至此地進行水下測量。而無人船體積小、船體輕便,可輕松實現船體運輸、下放、回收等操作。相比有人船能到達更淺、更復雜的作業區域,有效地解決了淺水岸線區域難以測量的問題。
1.2.3更智能,便維護
當面對較為復雜的水域環境時,有人船難以嚴格根據布設的航線進行測量,往往是蛇形走位,跑線質量不佳。無人船操作系統更加人性化、智能化,操作簡單,可自動根據規劃路線實現自主航行測量,保證船只實時在線測量,獲取的數據質量更高。無人船多波束測量系統采用模塊化設計方案,可快速拆裝,便于后期各硬件設備的保養維護。
2 機載LiDAR與無人船多波束水陸一體化作業
2.1 機載LiDAR測量技術
機載LiDAR技術是以無人機為載體,基于激光探測及測距系統、全球定位系統和慣性導航系統直接測量被測對象的3D點云數據[4- 6]。其獲取的點云數據是對地形表面最直接的描述和表達(如圖1(a)所示),是當前最可靠、最高效的3D地理數據采集技術之一。具有免相控、高精度、省人工、高效率、多回波、透植被等特點。
該技術通過GNSS系統提供載體的空間位置,地面基站提供后差分數據處理所需的同步相對地理信息[7- 8]。激光雷達的原理類似于電子測距儀,發射器發射激光(脈沖或連續波),并捕獲反射能量,利用激光從發射到接收的時間,測定地物與雷達之間的距離,與此同時慣導系統提供姿態數據。最后,使用GNSS/INS處理軟件,將GNSS數據、IMU數據導入軟件中進行解算,從而獲取高精度地物表面三維坐標點云數據,再通過測區控制點,量取偏差,評估點云數據精度。機載LiDAR的工作原理和技術流程如圖2所示。
2.2 無人船多波束測量系統原理
無人船多波束水下地形測量系統是以無人船為載體,集GNSS定位、IMU、多波束聲學傳感器、多波束甲板單元、定向羅經、表面聲速儀、聲速剖面儀等多種設備于一體的水下三維地形數據采集技術,可快速獲取水下地形三維空間點云數據(如圖1(b)所示)。
多波束測深系統通過陸地上架設基站提供動態實時差分信號為測深平臺提供準確實時定位,基于換能器陣列向水底發射的寬扇聲波測量與被測物間的距離,并通過無人船上的慣導系統實時進行姿態糾正,從而能夠精確、快速地測出沿航線一定寬度內的水下地形三維點云數據。其工作原理和多波束硬件系統組成如圖3所示。
2.3 機載LiDAR與無人船測量系統協同作業
機載LiDAR與無人船測量系統的工作原理比較類似,需要經過作業準備、路徑設計、基站架設、系統校準、數據采集、數據處理等階段。其中在基站架設過程中可共同使用地面基站采集的靜態數據進行水陸點云數據的解算。兩者獲取的都是高密度、高精度的三維點云數據,因此在數據處理階段都可以通過點云數據濾波、去噪、配準等技術手段將水陸點云數據進行融合,最終獲取三維空間全覆蓋測量數據。其協同作業流程如圖4所示。
3 項目實踐
遼河干流位于遼寧省境內,全長538km,在遼河流域上已建多個調蓄水庫。水庫的建設在引調水、汛期庫區下游安全等方面具有舉足輕重的作用。對庫區進行系統測量,獲取庫區水上水下高精度三維地理數據,可為水利規劃、庫容計算、壩體監測、科學研究等方面提供必要的基礎數據,為遼寧省全面推進智慧水利現代化建設提供重要的基礎保障。本項目將固定翼無人機搭載AS900HL激光雷達和無人船搭載MS400P多波束技術相結合進行水陸一體化三維地理數據的采集,從三維點云數據的獲取、處理、輸出和精度檢驗等方面進行闡述,證明該技術在水利工程測量中的應用具有可行性,為未來在同類項目中的應用提供參考依據。
3.1 技術路線
本次項目以來遼河流域中某水庫庫區作為實驗區域,實驗當天環境良好,風速滿足測量條件,測量過程嚴格按照相關規范要求。
(1)作業準備階段,在無人機起飛前進行姿態糾正進行八字形環繞以減少慣導系統的累計誤差,無人船采用同樣的操作流程。
(2)通過姿態校準使各項測量指標滿足要求后,且在試飛環節無問題時,即可進行數據的采集和錄入。無人機進行2個架次、無人船作業1.5h最終完成庫區水上水下數據采集任務。

圖3 多波束工作原理與硬件系統組成
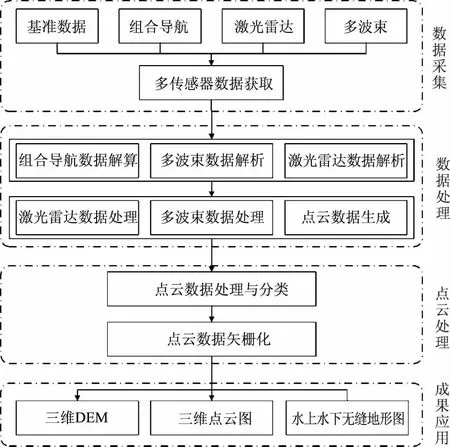
圖4 機載LiDAR和無人船測量系統協同作業流程圖
(3)基于機載LiDAR獲取的原始點云數據進行POS解算,多波束水下數據基于聲剖數據和動態表面建立等相關信息通過專業技術軟件進行計算處理。由于受環境條件影響,獲取的點云數據存在大量噪點,本文基于統計濾波、半徑濾波算法對噪點進行剔除,剔除結果如圖5所示,分別為去噪前和去噪后的點云數據,可以發現壩體上的毛刺噪點已經剔除。
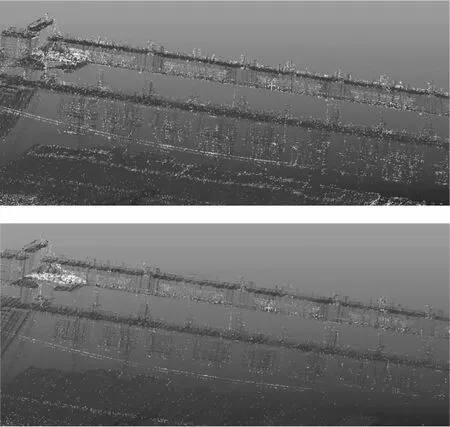
圖5 點云去噪處理
(4)將兩者去噪后的點云數據進行融合,最終輸出完整的庫區水上水下三維地理數據如圖6(a)所示,并基于布料模擬算法[9],動態設定標準參數濾除地面點,輸出三維地形數據,由于激光雷達具有穿透性,被數木所遮擋的地理位置同樣可獲取到相應的點云數據,如圖6(b)所示。
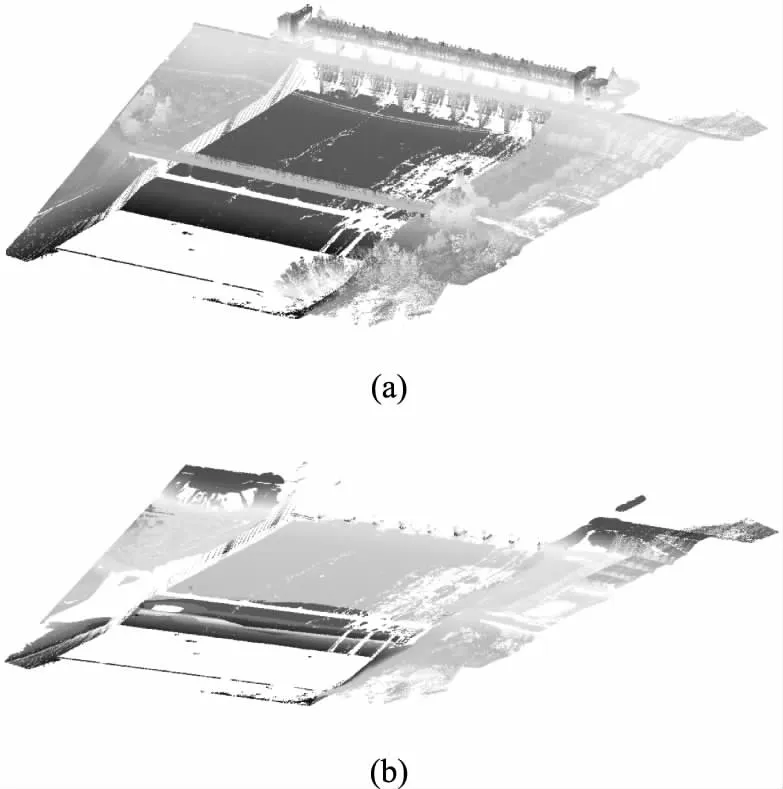
圖6 濾除非地面點
3.2 精度校驗
基于RTK在現場打點或收集現有的控制點,導入去噪后的水上水下點云數據,量取其平面中誤差為0.044m,滿足1∶500地形圖測圖中誤差要求。由此可知,基于機載LiDAR與無人船多波束獲取的點云數據精度可靠,水陸一體化測量技術切實可行。
4 結語
通過對機載LiDAR和無人船多波束測量系統進行詳細介紹,與傳統測量技術對比分析,并基于水庫工程項目實踐,證明該技術獲取的三維點云數據精度高、密度大,其成果可滿足最終的生產需求,為水利工程項目提供了更加豐富、可行的測量手段。雖然該技術在獲取水利信息方面具有其獨特的優勢,但也有如下不足:
(1)針對不同點云場景需調試相應的去噪參數,因此濾波技術自動化程度有待于提高。
(2)需要進一步挖掘數據的應用價值,如語義分割、庫容計算、滑坡預警等,為此點云處理算法的研發成為該技術推廣應用的關鍵。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
