四自由度機(jī)械臂的軌跡仿真研究
2022-06-05 11:11:56丁子涵徐顧自
內(nèi)燃機(jī)與配件 2022年10期
關(guān)鍵詞:機(jī)械
在工業(yè)4.0背景下,智能制造技術(shù)發(fā)展迅速,機(jī)械臂作為智能工廠的典型裝備廣泛應(yīng)用于裝配、焊接、噴涂和搬運(yùn)等復(fù)雜生產(chǎn)過(guò)程中,貫穿工業(yè)自動(dòng)化智能化生產(chǎn)的全過(guò)程
。機(jī)器人技術(shù)現(xiàn)在已經(jīng)發(fā)展成為集機(jī)械制造、自動(dòng)化工程、人工智能、虛擬現(xiàn)實(shí)技術(shù)、計(jì)算機(jī)技術(shù)等集于一體的學(xué)科。
本文基于ADAMS與MATLAB的聯(lián)合仿真。首先建立笛卡爾坐標(biāo)系,在MATLAB中對(duì)四軸機(jī)械臂做出軌跡規(guī)劃并將樣條曲線導(dǎo)入ADAMS軟件中,得到的軌跡運(yùn)動(dòng)與MATLAB中一致,表明機(jī)械臂在ADAMS中可以很好地復(fù)制運(yùn)動(dòng)軌跡。
隨著人類(lèi)社會(huì)不斷發(fā)展,化石能源的消耗不斷增加,能源危機(jī)、環(huán)境污染等問(wèn)題越發(fā)嚴(yán)重。近年來(lái),隨著潮汐能、太陽(yáng)能等可再生能源的不斷發(fā)展,作為影響其發(fā)展的關(guān)鍵技術(shù),儲(chǔ)能系統(tǒng)越來(lái)越受到人們的關(guān)注。其中,二次電池以其效率高、使用方便等優(yōu)點(diǎn)成為最具潛力的儲(chǔ)能方式。已經(jīng)趨于商業(yè)化的二次電池有鉛酸電池、鋰電池、鈉電池等,鋰電池因能量密度高、自放電小、安全無(wú)污染等優(yōu)勢(shì)已經(jīng)在通信電子產(chǎn)品領(lǐng)域得到大規(guī)模應(yīng)用。然而大規(guī)模工業(yè)儲(chǔ)能需要儲(chǔ)能器件滿足2個(gè)基本要求:一是安全性高,沒(méi)有安全就沒(méi)有儲(chǔ)能的未來(lái);二是成本低,任何技術(shù)的發(fā)展必須考慮成本問(wèn)題。
1 建立機(jī)械臂數(shù)學(xué)模型
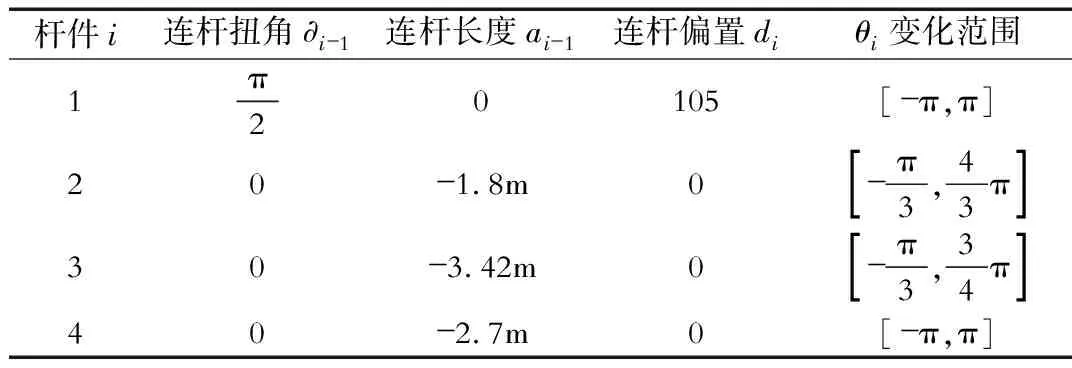
本文所研究的機(jī)械臂是由4個(gè)旋轉(zhuǎn)關(guān)節(jié)組成的,即4自由度。首先在NX 12.0中建立并裝配機(jī)械臂的三維模型。建立好模型后使用標(biāo)準(zhǔn)D-H參數(shù)法建立連桿坐標(biāo)系,D-H參數(shù)由Denavit和Hartenberg發(fā)明,是一種常用的描述機(jī)器人相鄰兩個(gè)連桿之間參數(shù)關(guān)系的方法
。
表1中,?
-1
為連桿轉(zhuǎn)角,是繞
軸由
-1
轉(zhuǎn)向
的角度;
-1
為機(jī)器人的連桿長(zhǎng)度,是繞
軸由
-1
到
的距離;
為關(guān)節(jié)角繞
-1
軸由
-1
到
的角度;
為連桿偏距,是繞
-1
由
-1
到
的距離。
打開(kāi)MATLAB中Robotics Toolbox工具箱建立機(jī)械手臂模型,定義機(jī)械臂名為“Scara”,定義初始角度四個(gè)關(guān)節(jié)的角度依次為 [0 0 -π/2 π/2];用LINK函數(shù)進(jìn)行編程,建立連桿對(duì)象,編程語(yǔ)句如下:
L(1)=Link([0 d1 a1 alpha1]);
L(2)=Link([0 d2 a2 alpha2]);
機(jī)械手臂關(guān)節(jié)空間軌跡規(guī)劃所研究的問(wèn)題是,機(jī)械手臂末端在工作時(shí),如何從起點(diǎn)出發(fā),途徑中間的插值點(diǎn),最后到達(dá)終點(diǎn)
。合理的軌跡規(guī)劃是機(jī)械臂運(yùn)動(dòng)過(guò)程穩(wěn)定的重要保證,可以減少運(yùn)動(dòng)過(guò)程中的沖擊與振動(dòng),保證機(jī)械臂運(yùn)動(dòng)的效率。機(jī)械臂關(guān)節(jié)空間運(yùn)動(dòng)軌跡規(guī)劃方法有很多,常見(jiàn)的規(guī)劃方法有多項(xiàng)式插值、貝塞爾曲線、線性迭代法等,其中多項(xiàng)式插值最常用的有三次多項(xiàng)式插值及五次多項(xiàng)式插值
。
L(4)=Link([0 d4 a4 alpha4]);
第二,電子巡檢。電子巡檢實(shí)現(xiàn)的背景為信息技術(shù)、遙測(cè)遙控技術(shù)等的不斷發(fā)展。在電子巡檢環(huán)節(jié)中,相關(guān)巡檢人員要結(jié)合基于遙測(cè)遙控技術(shù)的系統(tǒng)平臺(tái),完成對(duì)航標(biāo)狀態(tài)的遠(yuǎn)程管理與監(jiān)控。在這種巡檢方式下,相關(guān)巡檢人員不需要實(shí)際進(jìn)入相應(yīng)的海域進(jìn)行作業(yè),利用系統(tǒng)平臺(tái)以及計(jì)算機(jī)就能夠完成對(duì)相應(yīng)海域中航標(biāo)的燈質(zhì)、電流電壓、位置等信息數(shù)據(jù)的監(jiān)測(cè)。在發(fā)現(xiàn)異常情況時(shí),能夠第一時(shí)間的進(jìn)行通報(bào),提升航標(biāo)巡檢工作的效率,也降低了航標(biāo)巡檢工作的危險(xiǎn)性。
Scara=SerialLink(L,'name','Scara');
這樣就可以得到4軸機(jī)械臂模型。
2 正逆解與工作空間分析
2.1 機(jī)械臂運(yùn)動(dòng)的正逆解

(1)
對(duì)機(jī)械臂進(jìn)行運(yùn)動(dòng)仿真首先要對(duì)運(yùn)動(dòng)學(xué)分析,運(yùn)動(dòng)學(xué)分析是軌跡規(guī)劃的前提,可以更好地控制機(jī)械臂的運(yùn)動(dòng)。對(duì)機(jī)械臂進(jìn)行仿真前,需要推導(dǎo)出機(jī)器人的正逆運(yùn)動(dòng)學(xué)公式。正運(yùn)動(dòng)學(xué)利用各個(gè)轉(zhuǎn)角的關(guān)系,求出機(jī)器人末端執(zhí)行器的位姿。利用表1中D-H參數(shù),以關(guān)節(jié)角度作為自變量,建立機(jī)械臂的正運(yùn)動(dòng)模型。機(jī)械臂相鄰連桿件的變化矩陣為:
將上述四個(gè)矩陣相乘得到:

(2)
符合機(jī)械臂的實(shí)際位姿。
在我國(guó)現(xiàn)行經(jīng)濟(jì)體制下,建筑業(yè)的比重越來(lái)越大,建筑工程規(guī)模也越來(lái)越大。因此,為了保證建筑業(yè)的正常發(fā)展,我們必須做好項(xiàng)目成本的動(dòng)態(tài)管理和控制。工程造價(jià)管理是整個(gè)工程建設(shè)過(guò)程中的核心環(huán)節(jié),對(duì)整個(gè)工程有著重要的影響。無(wú)論是決策、設(shè)計(jì)、施工還是竣工,都非常容易受到項(xiàng)目成本管理的影響。因此,為了避免不必要的資金浪費(fèi),控制整個(gè)工程建設(shè)的成本,處理工程造價(jià)管理工作,是建筑業(yè)發(fā)展的必由之路。


逆運(yùn)動(dòng)學(xué)是在一定轉(zhuǎn)角范圍內(nèi),通過(guò)末端位姿矩陣解出各個(gè)關(guān)節(jié)的轉(zhuǎn)角,逆運(yùn)動(dòng)學(xué)一般用于求解機(jī)械臂的軌跡規(guī)劃,方程組的解是否存在取決于機(jī)械臂的工作空間。對(duì)于四軸機(jī)械臂來(lái)說(shuō),工作空間有限,不能達(dá)到三維空間內(nèi)的所有位姿,所以部分位姿會(huì)出現(xiàn)無(wú)解的情況。
2.2 工作空間分析
機(jī)械臂的工作能力可以通過(guò)工作空間的分析來(lái)確定,在實(shí)際分析過(guò)程中,機(jī)械臂的末端在空間范圍內(nèi)所有的點(diǎn)的集合即是機(jī)械臂的運(yùn)動(dòng)空間
。
干巴爹:是日語(yǔ)“がんばって(頑張って)”的諧音。羅馬音:ganbatte中文近似讀音:gan ba te,所以中文音譯名是“干巴爹”。表示“加油、努力”的意思,常用于比較親密的人之間加油打氣鼓勵(lì)。
蒙特卡羅法是一種數(shù)值方法,常借助于隨機(jī)抽樣來(lái)解決數(shù)學(xué)問(wèn)題,使用廣泛。進(jìn)行工作間計(jì)算可節(jié)省大量時(shí)間,例如隨機(jī)生成30000個(gè)點(diǎn)只需要2到3分鐘,該方法可以對(duì)各種類(lèi)型的機(jī)械臂進(jìn)行工作空間的分析。本文取N=3000對(duì)工作空間計(jì)算,該機(jī)械臂在X,Y,Z三個(gè)方向取值見(jiàn)下圖1,圖2,機(jī)械臂的運(yùn)動(dòng)空間見(jiàn)下圖3。

3 機(jī)械手臂軌跡規(guī)劃
L(3)=Link([0 d3 a3 alpha3]);
3.1 五次多項(xiàng)式插值
三次插值多項(xiàng)式在處理已確定的起始點(diǎn)和目標(biāo)點(diǎn)的位姿、機(jī)械臂運(yùn)動(dòng)過(guò)程中速度與加速度的變化時(shí)往往無(wú)法滿足要求,這時(shí)需采用五次多項(xiàng)式插值進(jìn)行軌跡規(guī)劃。要使機(jī)械臂末端執(zhí)行器由初始位姿變化到目標(biāo)位姿,需要求出各個(gè)關(guān)節(jié)角隨時(shí)間的變化函數(shù)。
設(shè)關(guān)節(jié)的運(yùn)動(dòng)軌跡函數(shù)為:
HDPE管材運(yùn)至施工現(xiàn)場(chǎng)后,管材卸車(chē)時(shí),地面不應(yīng)有石塊等尖凸物并用廢舊汽車(chē)輪胎鋪墊,而后將管材逐根卸下,防止管材卸車(chē)時(shí)受傷。管材熱熔焊接前應(yīng)仔細(xì)檢查待連接管材及管件,對(duì)嚴(yán)重劃傷管材堅(jiān)決不能使用,防止管道受壓破損及以后使用中蠕變破壞。
=
+
+
+
+
+
(3)
在
時(shí)刻為初始位姿,
時(shí)刻為設(shè)定的目標(biāo)位姿,設(shè)
時(shí)刻轉(zhuǎn)角為
,
時(shí)刻轉(zhuǎn)角為
。
含柔直系統(tǒng)的電網(wǎng)潮流優(yōu)化控制以交流系統(tǒng)滿足式(1)~(5)的各節(jié)點(diǎn)正常功率平衡及各種安全性不等式約束條件、柔直系統(tǒng)滿足式(6)~(13)的工程運(yùn)行約束條件的前提下,使系統(tǒng)網(wǎng)損最小。
帶入約束函數(shù)方程為:
網(wǎng)絡(luò)技術(shù)的發(fā)展,使得高中物理教學(xué)具有更多的可能。教師需要增加對(duì)于網(wǎng)絡(luò)技術(shù)的了解,依據(jù)自身的教學(xué)目標(biāo),與網(wǎng)絡(luò)技術(shù)相結(jié)合開(kāi)展多樣化的教學(xué)活動(dòng),提升學(xué)生對(duì)于物理學(xué)習(xí)興趣,增強(qiáng)其專(zhuān)注度提升學(xué)習(xí)效率的同時(shí),培養(yǎng)綜合能力,實(shí)現(xiàn)較好師生關(guān)系的構(gòu)建。
(4)
上述方程組的解為:
建立和完善實(shí)驗(yàn)室的各項(xiàng)檔案,使其規(guī)范化和科學(xué)化,正確、全面反應(yīng)實(shí)驗(yàn)室建設(shè)的歷史,是非常必要和有意義的,但要維持完整的檔案是非常困難的,而確認(rèn)管理體系是否正常、有效和持續(xù)的運(yùn)行,最終的考核都體現(xiàn)在檔案(證據(jù)) 中。因此可以認(rèn)定“實(shí)驗(yàn)室管理體系的建立”必須完善檔案的完整[2]。
(5)
3.2 軌跡仿真
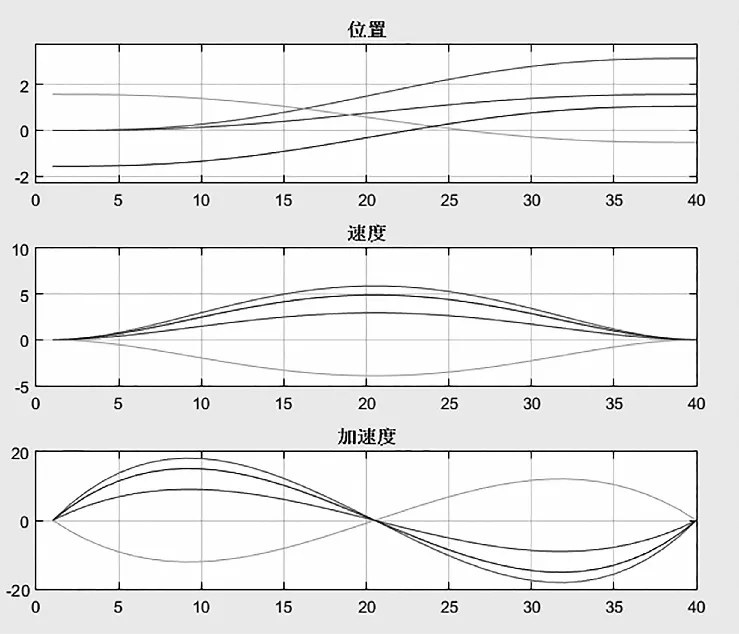
設(shè)每個(gè)關(guān)節(jié)初始運(yùn)動(dòng)速度,加速度均為0,利用JTRAT函數(shù)實(shí)現(xiàn)軌跡仿真,使其從初始位置 [0 0 π/2 -π/2]運(yùn)動(dòng)到[π/2 π -π/6 π/3],步長(zhǎng)為40,每步1s,利用PLOT函數(shù)繪制出機(jī)械臂末位姿,利用SUBPLOT函數(shù)繪制出四個(gè)關(guān)節(jié)在不同時(shí)間下的位置,速度與加速度的變化曲線圖,如圖4所示。
植物基質(zhì)沙墊是江蘇綠東坡環(huán)境工程有限公司生產(chǎn)的一種采用高密度、耐用、防腐蝕特殊性聚酯纖維和特殊工藝編織成的雙層或多層編織物,現(xiàn)場(chǎng)鋪設(shè)在受保護(hù)的坡面上,按順序注入各種混合基質(zhì),使坡面受到保護(hù),并可迅速恢復(fù)原有植被,達(dá)到自然狀態(tài)。植物基質(zhì)沙墊無(wú)骨料,無(wú)鋼筋,水上水下整體施工,無(wú)需圍堰和船舶拖排,施工簡(jiǎn)易,安全可靠,整體性強(qiáng),防護(hù)性好,抗沖刷(5~6m/s),抗水壓(30t/m2)、防淘蝕,適用性強(qiáng),生態(tài)美觀。植物基質(zhì)沙墊根據(jù)各種工況要求,可設(shè)計(jì)成反濾型、無(wú)濾型、植草型、抗浪型等多種類(lèi)型,可廣泛應(yīng)用于堤岸防護(hù)、水資源保護(hù)和水土保持工程中。
觀察得到圖中位移曲線平穩(wěn)、光滑,證明運(yùn)動(dòng)過(guò)程中沒(méi)有沖擊與振動(dòng)等運(yùn)動(dòng)特性,說(shuō)明機(jī)械臂運(yùn)動(dòng)的穩(wěn)定性和可靠性。
4 基于ADAMS的仿真結(jié)果
4.1 建立ADAMS模型
ADAMS可以對(duì)三維模型運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)性能進(jìn)行很好的分析與仿真,但在ADAMS界面中建模相對(duì)困難,無(wú)法構(gòu)建出比較復(fù)雜的幾何模型
。但ADAMS中自帶對(duì)外界建模軟件的借口,可以將建好的三維模型通過(guò)ADAMS-VIEW進(jìn)行數(shù)據(jù)的傳輸,然后對(duì)所建模型添加屬性、運(yùn)動(dòng)副、運(yùn)動(dòng)載荷等
。
將NX中四自由度機(jī)械臂的模型另存為Parasolid格式的.x_t文件,將文件導(dǎo)入ADAMS中,保存為.bin格式;添加全局重力為200N,方向向下,設(shè)置每個(gè)關(guān)節(jié)的材料為carbon_fiber_11_prepreg,機(jī)械臂關(guān)節(jié)4工作載荷為10N;設(shè)置工作格柵,依次添加固定副,轉(zhuǎn)動(dòng)副。
4.2 添加驅(qū)動(dòng)并進(jìn)行仿真
機(jī)械臂有4個(gè)轉(zhuǎn)動(dòng)副,因此需要添加4個(gè)驅(qū)動(dòng)。將MATLAB中得到的各個(gè)關(guān)節(jié)速度導(dǎo)出形成以時(shí)間為自變量的矩陣,導(dǎo)出成.txt文件,將文檔中的矩陣導(dǎo)入ADAMS,形成的SPLINE曲線再添加到AKISPL函數(shù)的編程表達(dá)式中形成驅(qū)動(dòng)。例如:motion1的仿真語(yǔ)句如下:AKISPL(time,0 ,SPLINE_1,0)。
設(shè)置機(jī)械臂運(yùn)動(dòng)的仿真時(shí)間為40s,每步為1s,進(jìn)行動(dòng)力學(xué)仿真。得到的運(yùn)動(dòng)軌跡與最終位姿與Matlab基本一致。
仿真成功后點(diǎn)擊后處理模塊POSTPROCESSOR,可以得到各個(gè)關(guān)節(jié)在X,Y,Z方向上的力矩隨時(shí)間變化曲線,從而得到各個(gè)驅(qū)動(dòng)峰值力矩,此峰值力矩可以作為后期機(jī)械臂的優(yōu)化條件。各個(gè)關(guān)節(jié)X,Y,Z方向所需力矩如圖5,6所示。


點(diǎn)擊后處理中繪圖跟蹤,可以得到motion2所需力矩最大,峰值力矩值為166.98N·m;motion1所需力矩的峰值為0.48N·m;motion3峰值力矩87.75N·m,motion4峰值力矩-12.74N·m。
5 結(jié)論
本文首先調(diào)用Robotics Toolbox工具箱建立D-H坐標(biāo)系;利用蒙特卡洛法研究分析機(jī)械臂的工作空間,進(jìn)一步達(dá)到了獲取了機(jī)械臂運(yùn)動(dòng)范圍的目的。然后再使用五次插值多項(xiàng)式對(duì)機(jī)械臂的軌跡進(jìn)行規(guī)劃,得到的角速度曲線呈現(xiàn)出較為平滑的特點(diǎn),從而使其可以平穩(wěn)到達(dá)設(shè)計(jì)好的任務(wù)目標(biāo)點(diǎn)。最后進(jìn)一步通過(guò)ADAMS進(jìn)行仿真,根據(jù)在后處理中繪制出的每個(gè)關(guān)節(jié)運(yùn)動(dòng)的力矩曲線能夠獲取運(yùn)動(dòng)所需求的最大力矩,并將此作為機(jī)械臂運(yùn)動(dòng)的邊界條件,為機(jī)械臂后期的優(yōu)化與結(jié)構(gòu)設(shè)計(jì)進(jìn)步提供依據(jù)。
[1]伍龍華,黃惠.點(diǎn)云驅(qū)動(dòng)的計(jì)算機(jī)圖形學(xué)綜述[J].計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)報(bào)2015,27(8):1341-1353.
[2]蘇融. 六自由度機(jī)械臂的工作空間分析和運(yùn)動(dòng)學(xué)仿真[C]//第十八屆沈陽(yáng)科學(xué)學(xué)術(shù)年會(huì)論文集.[出版者不詳],2021:648-653.DOI:10.26914/c.cnkihy.2021.009941.
[3]李憲華,孫青,范凱杰,張雷剛.雙臂6R服務(wù)機(jī)器人的協(xié)作空間分析與仿真[J].機(jī)械傳動(dòng),2018,42(09):130-134.DOI:10.16578/j.issn.1004.2539.2018.09.025.
[4]張玉娟. 一種新型用于搜救的連續(xù)體機(jī)器人運(yùn)動(dòng)學(xué)分析及仿真[D].河北工業(yè)大學(xué),2013.
[5]王大超,劉虹.基于MATLAB與ADAMS的機(jī)械臂仿真分析[J].機(jī)械工程與自動(dòng)化,2017(06):59-60+62.
[6]汪磊,毛衛(wèi)平.基于ADAMS和Pro/E彎腳機(jī)械臂運(yùn)動(dòng)仿真分析[J].機(jī)械制造與自動(dòng)化,2015,44(06):110-112.
[7]夏偉,張妍.基于SolidWorks和ADMAS的六自由度機(jī)械臂聯(lián)合仿真研究[J].機(jī)械工程與自動(dòng)化,2021(05):79-81.
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
