基于視覺識別的車輪拆卸機械手末端執(zhí)行器的設(shè)計*
2022-06-08 03:14:46檀志遠徐俊梅孫麗英
南方農(nóng)機 2022年11期
檀志遠 ,陳 濱 ,徐俊梅 ,孫麗英
(合肥科技職業(yè)學(xué)院信息工程系,安徽 合肥 230000)
將視覺識別技術(shù)結(jié)合機械手應(yīng)用到報廢汽車車輪拆卸過程中,重點是針對車輪輪轂螺栓的拆卸,從專用工具的設(shè)計和仿真技術(shù)的應(yīng)用出發(fā),在虛擬環(huán)境中完成拆卸過程,以視覺拆卸機器人動作為手段,研究拆卸工藝及拆卸過程,在虛擬環(huán)境中完成車輪拆卸機械手的動作仿真。并且,在虛擬環(huán)境中對報廢汽車拆卸技術(shù)的研究可以減少前期資金的投入,可以進行反復(fù)測試,完成螺栓的拆卸過程,從而得出優(yōu)化后的拆卸規(guī)劃理論,為研究視覺機器人拆卸報廢汽車車輪連接螺栓提供一個基礎(chǔ)理論平臺,提高報廢汽車拆卸效率,促進報廢汽車拆卸行業(yè)發(fā)展。
1 技術(shù)需求分析
工業(yè)機器人是機械手的統(tǒng)稱,廣泛應(yīng)用于各行各業(yè)的各種領(lǐng)域中,它能夠按照預(yù)先編制好的示教指令執(zhí)行工作,主要依靠外在動力系統(tǒng)和控制系統(tǒng)實現(xiàn)功能操作,隨著不斷升級換代,正在逐步走向自動化、智能化[1]。首先,車輪拆卸機械手和其他工業(yè)領(lǐng)域應(yīng)用機械手在手臂結(jié)構(gòu)和功能上有很大的相似性,比如焊接機械手和碼垛機械手,主要區(qū)別是末端執(zhí)行器手部功能不一樣,因此手臂應(yīng)當具備機械手通用的功能,除此之外,還應(yīng)添加一些針對車輪拆卸作業(yè)的技術(shù)特點。課題組設(shè)計的車輪拆卸機械手,主要針對報廢汽車處理過程中車輪輪轂螺紋連接件的拆卸,主要對象是四孔定位車輪和五孔定位車輪的拆卸,其作業(yè)流程是通過視覺系統(tǒng)分辨出車輪的定位孔數(shù)是四孔還是五孔,然后確定具體定位螺栓的大小和位置,由機械手控制系統(tǒng)控制手部運動和末端執(zhí)行器的執(zhí)行運動,最后通過路徑規(guī)劃順利地將四孔定位車輪和五孔定位車輪連接螺栓拆卸下來。但是,車輪拆卸機械手在拆卸的過程中有時會遇到定位螺栓銹蝕等問題,因此要求機械手的末端執(zhí)行器應(yīng)當具有過載保護的功能。由于報廢汽車廠的報廢汽車在拆卸過程中一般都是流水作業(yè),因此要求拆卸機械手能夠適應(yīng)高效率流水作業(yè),應(yīng)當具備全方位移動功能,同時末端執(zhí)行器應(yīng)當具備精確識別和定位功能。而拆卸機械手在工作過程中應(yīng)當是定位和拆卸交替進行的,因此要求車輪拆卸機械手要具備可擴展的接口,實現(xiàn)模塊化控制的功能。
根據(jù)上述內(nèi)容,可以確定車輪拆卸機械手的結(jié)構(gòu)及功能如下。
結(jié)構(gòu)上車輪拆卸機械手主要是由多個關(guān)節(jié)組成,是一種具有多自由度的閉合空間運動機構(gòu)。一般來說,拆卸是裝配的逆向過程,結(jié)合現(xiàn)有工業(yè)應(yīng)用領(lǐng)域中裝配機械手的實際情況,一般可設(shè)計為六自由度,基座為固定底座。因此,車輪拆卸機械手也可設(shè)計自由度為六個,基座也為固定基座,最主要的區(qū)別在于末端執(zhí)行器機構(gòu)的不同。因此,針對報廢汽車車輪螺紋連接件拆卸的末端執(zhí)行器,是對專用拆卸工具的改進設(shè)計[2]。
功能上車輪拆卸機械手能夠兼容視覺識別系統(tǒng),視覺識別系統(tǒng)對目標定位車輪的螺栓孔數(shù)和螺栓大小識別率要達到90%以上,才能達到實際測試應(yīng)用水平。在實際的工作過程中要求控制系統(tǒng)對視覺相機及驅(qū)動電機具有實時的信息監(jiān)測與反饋功能,整個控制系統(tǒng)應(yīng)當具備良好的穩(wěn)定性和一定的可擴展性。此外,末端執(zhí)行器要結(jié)合四孔定位車輪和五孔定位車輪螺紋連接件的類型,設(shè)計出一種能夠?qū)崿F(xiàn)同步拆卸的專用裝置,能夠根據(jù)視覺識別技術(shù)進行前期識別判斷,并且能適應(yīng)節(jié)度圓尺寸和定位螺紋連接件大小不一等情況,從而進行相應(yīng)調(diào)整,最后快速穩(wěn)定地完成報廢汽車車輪螺紋連接件的拆卸工作。
2 視覺識別方案設(shè)計
2.1 視覺傳感器選型
視覺傳感器作為視覺識別模塊的重要組成部分,最主要的作用是通過識別圖像而獲取信息[3-5]。一般來說,在選取視覺傳感器時需要綜合比較相機的分辨率大小、信號類型、幀率大小以及主要傳輸方式等。其中,當下的信號傳遞方式主要為數(shù)字模擬信號進行傳遞或者數(shù)字信號進行傳遞,由于數(shù)字模擬信號在傳遞的過程中極容易受到其他信號的干擾,因此在視覺識別模塊中經(jīng)常會選用一些抗干擾性能較強的數(shù)字型相機。在視覺識別模塊中分辨率的高低和幀率的高低都是重要的影響因素,分辨率影響著清晰度,幀率影響以秒為單位獲取圖片的幀數(shù),即直接影響識別的速度。此外,傳輸方式也是影響因素之一,對傳輸圖像的大小起著直接決定性的作用。根據(jù)實際需求,進行綜合性能比較和相關(guān)參數(shù)分析,一方面本方案中選取的相機應(yīng)當具備高幀率,另一方面相機選型時需結(jié)合機械臂控制系統(tǒng)與視覺識別系統(tǒng)相互對接的思路[6]。
在進行視覺識別模塊選型時,主要將Kinect v1和Kinect v2進行對比。首先,Kinect v1是一種利用主動式深度感應(yīng)技術(shù)TOF(time of flight)的視覺傳感器,測算目標距離主要是通過分析紅外線反射所需的時間,而Kinect v2主要是通過分析紅外線照射到物體表面的反饋信息來計算深度,從而形成深度圖像。Kinect v1的識別方式比Kinect v2更容易受到強光線的干擾,并且Kinect v2具有高分辨率,傳輸方式一般選擇USB3.0[7]。Kinect v2是一種同時具備色彩和深度的圖像傳感器,不僅可以獲得彩色圖像信息,還可以獲得深度圖像信息。
2.2 目標識別原理與定位方法
在進行相應(yīng)目標識別作業(yè)時,左右兩個相機一般為相對設(shè)置,分別命名為C、C.。即在空間位置中任意選擇一點M(X,Y,Z),在C、C.中形成投影點,分別為m(u,vi)和m.(u,v)。根據(jù)針孔成像原理,C、C.的光心為O、o.,其中點M是直線Om和o.m.的交點,M、O、m、o.、m.五個點形成一個新的平面,因為O、m、o.、m.的四點坐標是已知的,所以點M相應(yīng)的三維坐標可根據(jù)四點坐標值聯(lián)立方程組直接求出。
3 拆卸機械手方案設(shè)計
3.1 拆卸機械手臂結(jié)構(gòu)選型
機械手臂是車輪拆卸機械手的重要執(zhí)行部件,主要作用是支承腕關(guān)節(jié)和末端執(zhí)行器,負責通過路徑運動將末端執(zhí)行器定位到報廢汽車定位車輪附近,直到完成車輪定位螺栓的拆卸過程。一般來說,機械手臂主要是由連桿和一系列關(guān)節(jié)部分組成,并且關(guān)節(jié)部分一般都會設(shè)置獨立的驅(qū)動裝置,但也有一些特殊的機械手臂驅(qū)動裝置沒有設(shè)置在關(guān)節(jié)部分。
機械手臂的類型多種多樣,作業(yè)方式和適用范圍也各不相同,機械手臂也具備多種分類方式,根據(jù)作業(yè)過程進行具體選型時,可以按照坐標系不同分類進行比較。綜合對比各相關(guān)因素,主要包括機械手工作空間大小、定位精度高低、自身所占用空間以及實際適應(yīng)工況等因素,最終決定選用關(guān)節(jié)坐標型機械手結(jié)構(gòu)模型。
3.2 拆卸機械手末端執(zhí)行器的結(jié)構(gòu)設(shè)計
報廢汽車車輪拆卸機械手整體設(shè)計中最重要的部分便是末端執(zhí)行器的設(shè)計。本文通過工業(yè)機器人應(yīng)用技術(shù),在分析機器人參數(shù)和原理的基礎(chǔ)上,以瑞士ABB公司的IRB2400型機器人為原型構(gòu)建虛擬機器人,并使部分參數(shù)與真實IRB2400型機器人相同,即有效載荷能達到7 kg~20 kg,最大到達距離達1.8 m[8]。對機器人的末端執(zhí)行器進行改進設(shè)計,針對對象主要是四孔定位車輪和五孔定位車輪,從而設(shè)計四孔車輪拆卸裝置和五孔車輪拆卸裝置,即分別設(shè)計為四個螺紋連接件拆卸裝置和五個螺紋連接件拆卸裝置實現(xiàn)同步拆卸。與現(xiàn)有技術(shù)相比,本設(shè)計使得裝置可以實現(xiàn)多孔定位螺栓同步拆卸,且設(shè)有過載保護裝置,提高了拆卸過程中的安全性,最終有針對性地面向報廢汽車車輪螺紋連接件進行拆卸。通過對報廢汽車車輪拆卸機械手的整體結(jié)構(gòu)設(shè)計,結(jié)合機械手臂的選型,螺紋連接件拆卸裝置以及末端執(zhí)行器的應(yīng)用設(shè)計,采用SOLIDWORKS軟件繪制了車輪拆卸機械手的三維模型圖,同時完成了車輪拆卸機械手的整體裝配圖及二維圖的繪制。
車輪拆卸機械手的末端執(zhí)行器是直接接觸四孔定位車輪和五孔定位車輪,執(zhí)行車輪螺紋連接件拆卸作業(yè)的機構(gòu)。目前,很少有針對車輪拆卸末端執(zhí)行器的研究,在這些少數(shù)的研究方案中更多是設(shè)計逐孔單個螺紋連接件的拆卸末端執(zhí)行器。按照驅(qū)動方式來分主要有以下兩種:一種是電動的螺母機,通過電動機驅(qū)動套筒旋轉(zhuǎn),從而對螺紋連接件進行拆卸作業(yè);另一種是采用氣動的方式對螺紋連接件進行拆卸,通過氣源控制正負氣壓來實現(xiàn)螺紋連接件的正轉(zhuǎn)和反轉(zhuǎn),從而完成車輪螺紋連接件的拆卸作業(yè)。
車輪拆卸機械手末端執(zhí)行器中單個工具頭的結(jié)構(gòu)設(shè)計圖如圖1所示,通過改進設(shè)計將單個工具頭分別布置為四孔車輪拆卸裝置和五孔車輪拆卸裝置,從而安裝在機械手的前端設(shè)計為新型車輪拆卸機械手。機械手的動力模塊選用交流伺服電機,這主要是因為交流伺服電機具備功率范圍大、運行平穩(wěn)等特點[9]。考慮到工具頭的前端接頭需要具備自動更換功能,因此將接頭設(shè)計為外14內(nèi)12的標準接頭。另外,控制部分具備I/O、A/D和D/A等多種接口模式,可對扭矩傳感器電機啟動轉(zhuǎn)速進行控制,可實現(xiàn)過載保護機構(gòu)的運行控制。
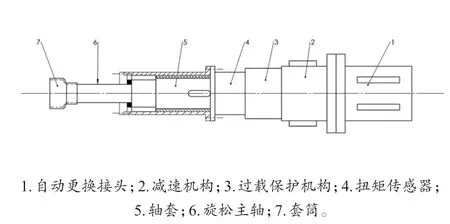
圖1 末端執(zhí)行器工具頭機械結(jié)構(gòu)簡圖
本文設(shè)計了一個雙轉(zhuǎn)盤式柔性結(jié)構(gòu)的末端執(zhí)行器,主要分為左右兩個部分,左端搭載四孔定位螺栓拆卸裝置,右端搭載五孔定位螺栓拆卸裝置,使用氣缸帶動連桿調(diào)控手爪孔徑的大小,適應(yīng)不同大小定位車輪的螺栓節(jié)圓直徑。其中,四孔定位螺栓拆卸裝置分為四個電機驅(qū)動的螺栓拆卸裝置,五孔定位螺栓拆卸裝置分為五個電機驅(qū)動的螺栓拆卸裝置,并分別設(shè)置有過載保護裝置,從而分別進行同步定位拆卸作業(yè),如圖2所示。該末端執(zhí)行器主要由轉(zhuǎn)盤、氣缸和套筒拆卸裝置組成,搭載在機械手臂的前端[10]。工作時,通過視覺相機確定定位車輪緊固螺栓的坐標及規(guī)格,機械手根據(jù)反饋信息,通過工具自動更換技術(shù),轉(zhuǎn)動第一轉(zhuǎn)盤或者第二轉(zhuǎn)盤,使對應(yīng)規(guī)格的螺栓拆卸裝置同步旋轉(zhuǎn)拆卸螺栓,再通過調(diào)節(jié)件及夾緊件將車輪拆卸脫離車體,最后由機械手臂吸附螺栓,再運動至工具擺放處上方將螺栓放入其中,至此,該末端執(zhí)行器完成了一次完整的拆卸作業(yè)。
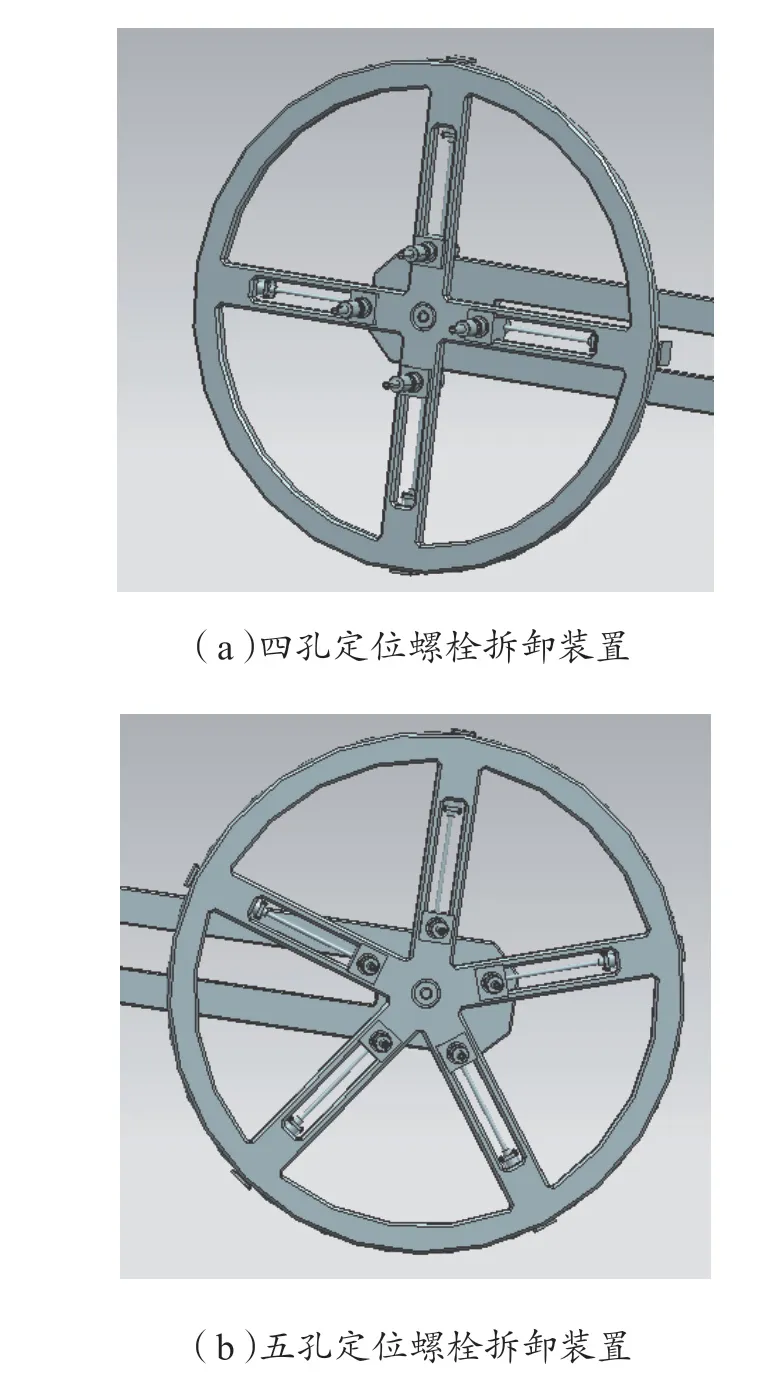
圖2 末端執(zhí)行器結(jié)構(gòu)設(shè)計圖
4 關(guān)鍵零部件的有限元分析
一般來說,機械手在運行工作過程中對于結(jié)構(gòu)強度的要求是非常高的,可以說結(jié)構(gòu)強度對機械手的正常工作起著決定性的作用,而結(jié)構(gòu)強度的影響因素來源于結(jié)構(gòu)材料,所以材料的選擇是結(jié)構(gòu)設(shè)計的前提[11]。綜合考慮車輪拆卸機械手需要具備質(zhì)量輕、運動靈活等特點,因此機械手臂主要采用高分子材料,末端執(zhí)行器的連接部分采用鋁合金,高分子材料和鋁合金同時具備質(zhì)量輕的特點。然而,鋁合金同樣具備機械強度較低的缺陷,因此對于關(guān)鍵零部件的選用,尤其需要進行相關(guān)分析,從而設(shè)計出在合理的結(jié)構(gòu)尺寸下滿足強度要求的機械手。
機械臂的運動是由下往上依次傳遞扭矩至機械手的末端執(zhí)行器[12],整個機械結(jié)構(gòu)類似懸臂梁結(jié)構(gòu),機械臂在運動過程中最末端的關(guān)節(jié)與執(zhí)行器承擔著關(guān)鍵性的拆卸功能。因此,需要通過對末端執(zhí)行器與關(guān)節(jié)連接部分進行有限元分析,校核其結(jié)構(gòu)強度,從而全方位驗證結(jié)構(gòu)設(shè)計的合理性[13]。
平衡架作為搭載四孔定位車輪拆卸裝置和五孔定位車輪拆卸裝置的安裝底座,其結(jié)構(gòu)強度直接影響機械手作業(yè)過程中的穩(wěn)定性和準確性。
執(zhí)行裝置是搭載工具頭的關(guān)鍵零件,主要作用是控制工具頭的節(jié)度圓調(diào)整和作業(yè)過程的抗震動性,因此對平衡架的有限元分析也是非常有必要的。
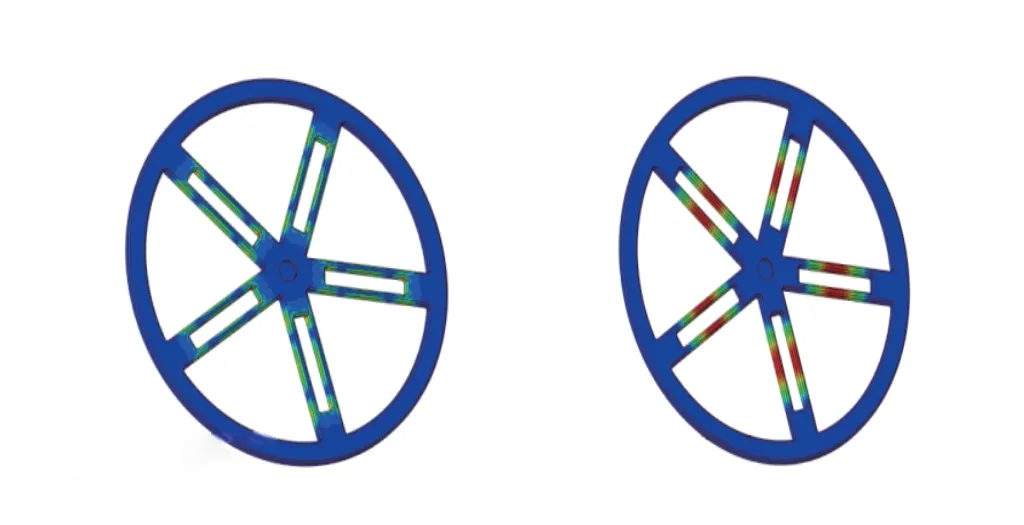
圖3 末端執(zhí)行裝置分析圖
末端執(zhí)行裝置分析圖如圖3所示,可以看出整個模型在運動過程中,受力主要集中在末端關(guān)節(jié)加載荷的區(qū)域。其中關(guān)節(jié)部件的中間區(qū)域的應(yīng)力最大,分布面積較小,遠離固定區(qū)域,應(yīng)力分布良好,應(yīng)力水平較低。執(zhí)行器末端應(yīng)力分布均勻,且主要體現(xiàn)為根部受力。遠離梁根部區(qū)域應(yīng)力迅速下降,應(yīng)力水平變低。通過計算可得,所有結(jié)構(gòu)件在壓強的作用下受力均遠未達到屈服階段。因此,整個末端裝置以及部件形變微小,整體結(jié)構(gòu)安全,強度滿足要求。
- 南方農(nóng)機的其它文章
- 提升基層農(nóng)業(yè)綜合行政執(zhí)法隊伍能力素質(zhì)的路徑*
——以東至縣農(nóng)業(yè)綜合執(zhí)法改革現(xiàn)狀為例 - 大數(shù)據(jù)背景下農(nóng)業(yè)企業(yè)成本管理現(xiàn)存問題與對策*
- 氣象信息服務(wù)在農(nóng)業(yè)生產(chǎn)中的應(yīng)用分析*
- 單級雙吸離心泵氣蝕的原因及防治措施*
- 小型農(nóng)田水利工程管理的問題及優(yōu)化對策*
- 中高職銜接背景下機電一體化技術(shù)專業(yè)課程建設(shè)研究**
——以“PLC技術(shù)及應(yīng)用”課程為例