一種火龍果自動采摘收獲機械的設計*
2022-06-08 03:14:46邱立琦于吉政張協良趙俊豪
南方農機 2022年11期
邱立琦 ,于吉政 ,張協良 ,趙俊豪
(聊城大學機械與汽車工程學院,山東 聊城 252000)
火龍果在經濟價值方面有生產周期短、畝產值高等優勢。近年來,我國海南、廣西、廣東、福建、貴州等省份,火龍果種植呈現出相對穩定的增長態勢。數據顯示,2021年我國共種植火龍果4.2萬hm2,產量207.56萬t。為減輕火龍果工作人員的勞動強度,提高火龍果采摘效率,減少對果實的損傷,課題小組設計了一款火龍果采摘機[1-5],火龍果采摘機整體模型如圖1所示。
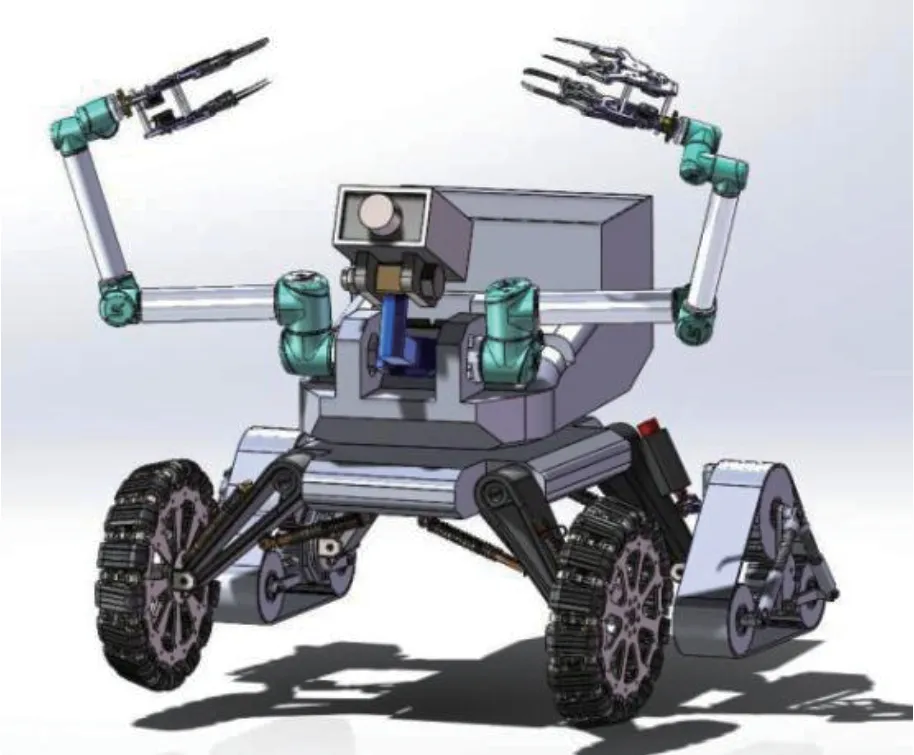
圖1 火龍果采摘機整體模型
1 五軸關節型機械臂機構
很多學者針對不同的作物設計了精細化的采摘設備,如王燕等[6]設計了四自由度采摘手,但其靈活性和作業范圍具有明顯的局限性。為了更加準確抓取火龍果,本研究采用了五軸關節型機械臂機構。采用五軸關節型機械臂機構,機械臂能夠根據需要實現移動和轉動[7]。伺服電機用作裝置中的執行元件的微型特種電機,將電信號轉成軸的角位移和角速度,具有控制的實時性、準確性等特點。五自由度機械臂模型與運動分析如圖2所示,L1、L2、L3、L4為連桿的長度。假設Pi是第i個關節的矢量坐標;Ri是第i個關節的姿態;θi是第i個關節的轉動角度;w1、w2表示運動過程中腕關節的2個位置,w2點位置矢量r=(rx,ry,rz)。火龍果采摘機器人硬件平臺的構成如圖3所示。
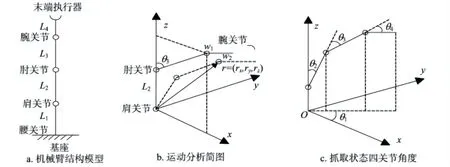
圖2 五自由度機械臂模型與運動分析
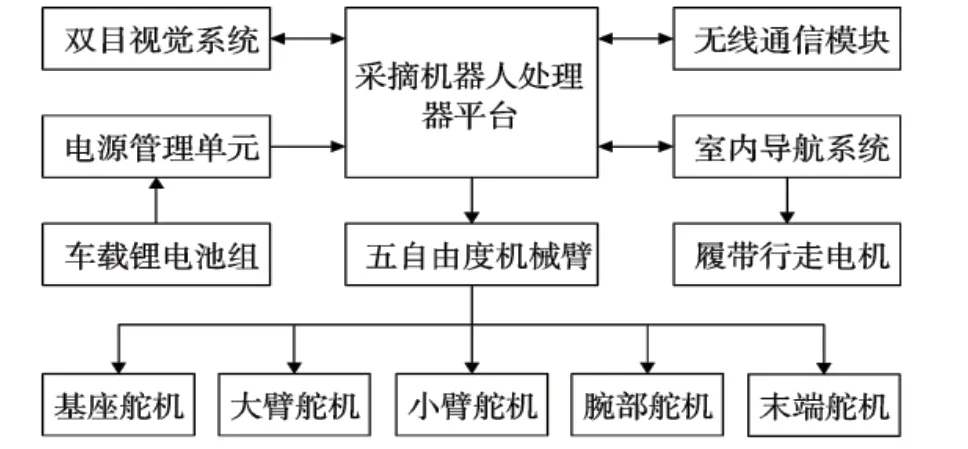
圖3 火龍果采摘機器人硬件平臺的構成
2 夾持切割機構
夾持切割機構包括夾持運輸機構和限位切割機構,兩者同時位于機械爪上,同時被電機控制,實現夾持與剪切一體化,夾持切割機構模型如圖4所示。等效為彈簧阻尼的夾持機構,與火龍果接觸作用過程中,需實時調整阻抗模型參數以適應環境的變化。為此,本研究制定了一種令阻抗模型剛度參數為零,同時對阻尼參數進行基于期望夾持力與采集實際接觸力的偏差實時調整的變阻抗控制方法,以實現火龍果分揀夾持機構對火龍果的無損夾取。對火龍果分揀機器人夾持機構進行了運動學分析及動力學建模,針對該模型設計火龍果分揀機器人夾持機構的自適應變阻抗控制算法(VIM+SMC),并進行穩定性證明與仿真驗證[8]。
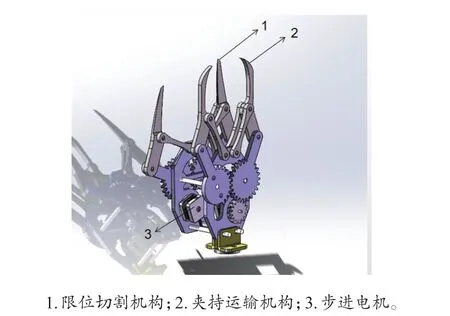
圖4 夾持切割機構模型
1)限位切割機構。限位切割機構整體為爪型刀頁,割刀尾端具有鋒利的刀鋒,割刀前端為刀鋒,作為輔助夾持機構,防止剪斷時果實掉落,兩片刀頁用兩頭螺栓固定連接;限位片整體為兩端略寬,中部稍窄的骨形,一邊與刀頁連接,一邊與傳動齒輪連接,使兩片刀頁聚攏切割和張開,同時可限制刀頁位置,防止刀頁運動超程。
2)夾持運輸機構。夾持手爪為圓弧夾持型,適用于火龍果果型,同時具有夾持和松緊的功能,有一定的力約束和形狀約束,保證被夾持果實在移動、停留和裝入過程中不改變姿態。手爪在傳動機構中,兩手繞支點做圓弧運動,同時對火龍果果實進行夾緊和定心。
3 控制系統
智能控制芯片,通過設定的程序對攝像頭和傳感器的信號數據進行處理,并判斷出實現功能所需的指令信號并傳輸到執行機構。F2812芯片作為人機交互部分和運動控制部分的主控芯片,可以控制兩個四自由度或一個六自由度的機械手[9]。CPU選用的是日本NOVA電子有限公司開發研制的MCX314運動控制芯片。本設計系統用了兩塊MCX314運動控制芯片[10]。
4 行走機構
后輪驅動裝置圖如圖5所示,車后輪為三角履帶輪作為驅動輪,3個支重輪、導向輪由支撐架固定,電機安裝在支架上的電機固定結構內,由萬向節連接低速大扭矩馬達減速機,具有高通過性能。后輪驅動裝置采用履帶傳動,具有爬坡能力強、穩定性高、適用于田間任何地形等特點。
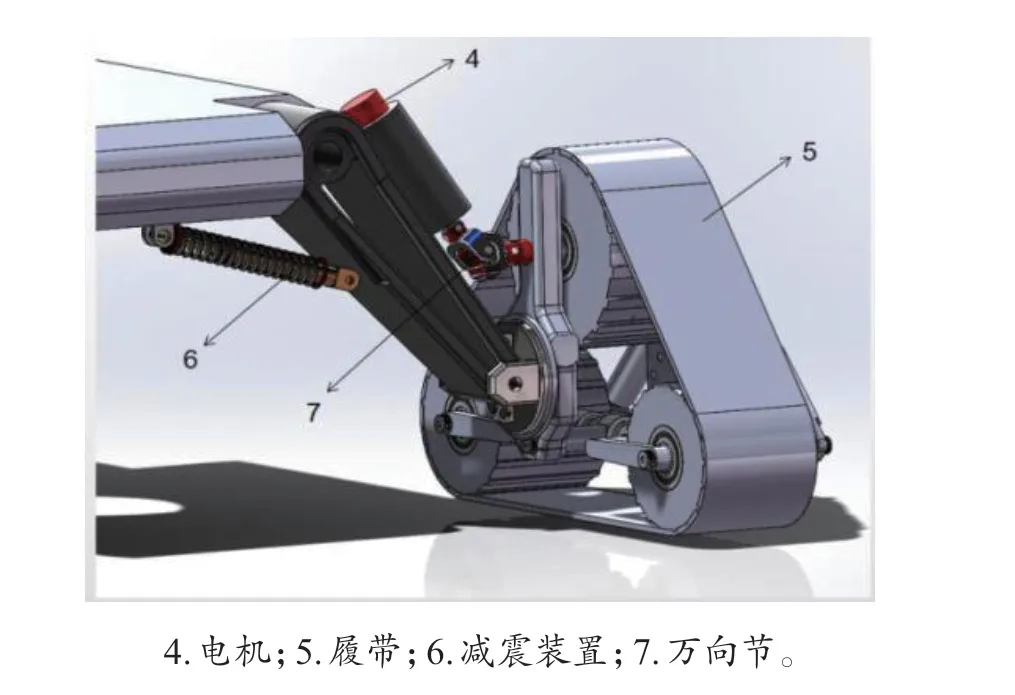
圖5 后輪驅動裝置圖
行走機構總體裝置圖如圖6所示,前輪為人字輪,作為轉向輪,輪胎由耐磨橡膠制成,比一般輪胎壽命更長,輪轂采用鋼型材加工而成,中心孔四周有四個螺栓口,用于固定輪軸連接件。
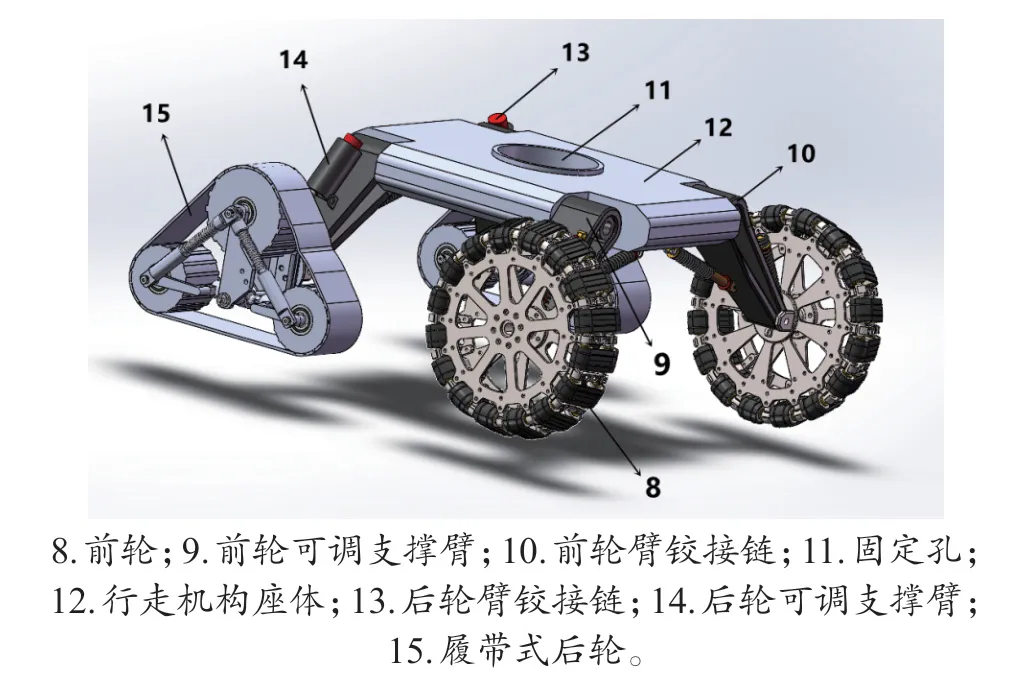
圖6 行走機構總體裝置圖
輪軸連接件由鋼板與鋼管焊接而成,鋼板一端通過螺栓固定于輪轂上,鋼管一段與前輪軸相連接固定。
后輪減震軸由氣缸和減壓彈簧組合而成,減壓彈簧連接在機身和車輪輪軸上,當有車身震蕩時,減壓彈簧吸收了振幅,從而保證了整體機器的穩定性。
對車腿支撐架進行有限元分析,經模擬分析,可以實現車輪的運行,支架有限元分析圖像結果如圖7所示。
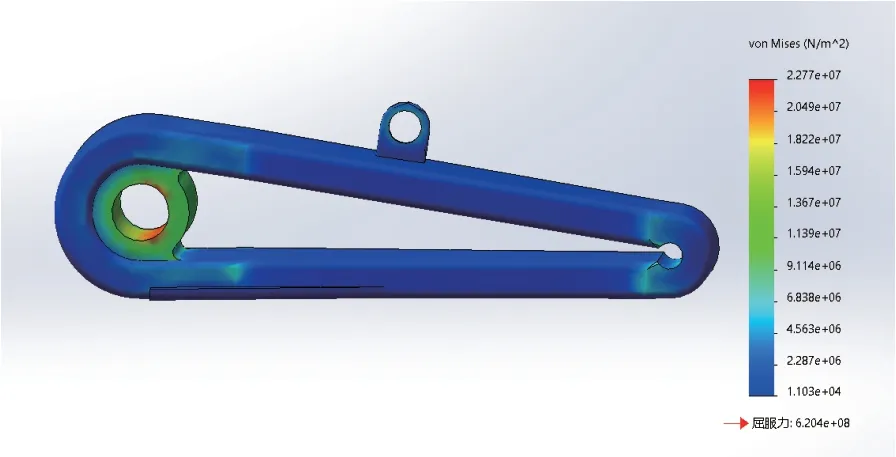
圖7 支架有限元分析圖像結果
5 雙目立體視覺定位測距機構
雙眼立體視覺測距儀的核心技術就是利用仿生眼來達到與人體相似的視覺識別能力。利用電腦對影像的了解,可以讓機器人感受到物體的運動特征,并對其進行描述和辨識,從而實現對目標的精確定位和距離。該系統的開發平臺是以OpenCV 2.4.9為基礎的Visual Studio 2013編寫的。雙目立體視覺定位測距機構如圖8所示,主要由兩個工業攝像機、三角支架、雙目板、水平儀、萬向三維云臺等組成。

圖8 雙目立體視覺定位測距機構
立體視覺定位與測距框圖如圖9所示,雙眼立體視覺距離測量系統由特征提取、立體匹配、三維定位和距離測量等部分組成。基于特征立體匹配算法框圖如圖10所示,抽取的特征點可以構造出相應的特征描述,并選取適當的相似度指標來搜索出兩張圖片中所對應的相似點。立體匹配是雙眼立體視覺中最為關鍵和最為復雜的部分,其匹配的優劣將直接關系到視差的品質。雙目立體視覺定位與距離測量是根據攝像機標定過程獲得的攝像機參數,結合立體匹配得到視差,再通過平行雙目視覺模型便可計算出目標物體的三維信息[11-14]。
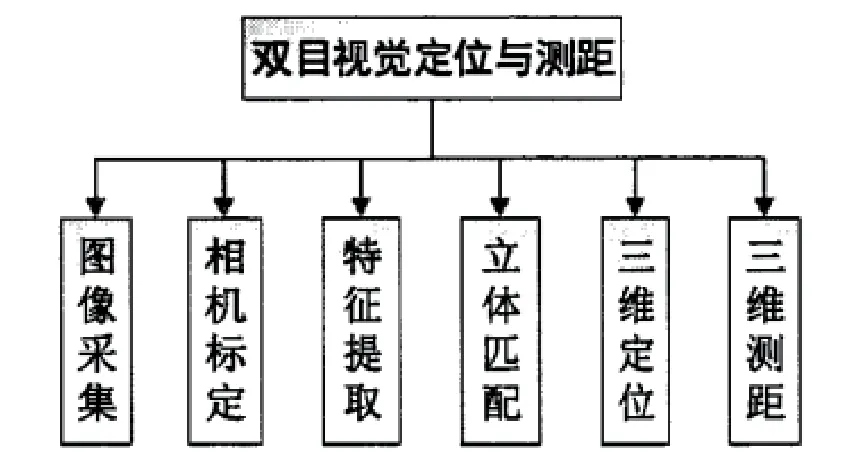
圖9 立體視覺定位與測距框圖
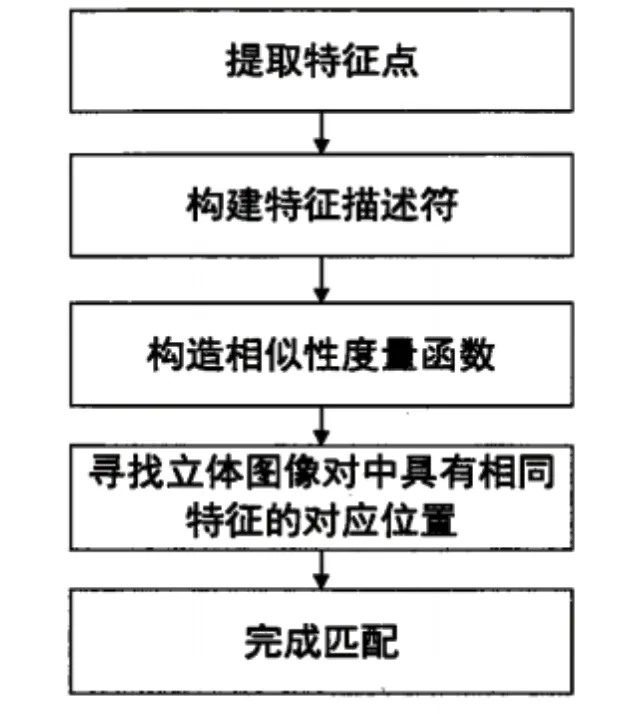
圖10 基于特征立體匹配算法框圖
6 結語
火龍果自動收獲采摘機械使用可充電電池,為整個機械提供動力,具有能源環保、噪聲低、靈活度高、操作簡單、體積小、重量輕等特點;運動轉向機構由轉向從動輪和后部履帶動力輪組成,便于在碎石及泥土路面行駛,提高機器整體運行的穩定性;夾持收獲機構由夾持手、限位切割刀、多軸運動臂及其傳動齒輪組合件組成,其中多軸運動臂由多組液壓缸和軸控制器組合而成,具有位置伺服功能,能實現多軸聯動、速度加速度控制、動態補償等,便于對多方位的火龍果進行采摘同時可將火龍果裝入后方裝載倉中;控制系統由微型處理器、外圍儲存器、傳感器接口、軸控制器、輔助設備控制、通信接口和網絡接口等組成,保證了機械臂運動的準確性,盡可能保證采摘過程中沒有遺漏果實并且采摘時不傷果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49