基于PLC的氣動爬桿機器人教學實驗臺的開發與設計
2022-06-18 08:00:24沈燦鋼黃振華
電子元器件與信息技術 2022年4期
沈燦鋼,黃振華
1.江陰職業技術學院,江蘇江陰,214405;2.中國衛星海上測控部,江蘇江陰,214405
0 引言
機器人發展至今,已經出現了極多的分支,爬桿機器人因其實用性而成為機器人家族中一個較大規模的分支。爬桿機器人種類眾多,按照行動方式可以分為輪式、蠕動式等,按照驅動方式可以分為電動、氣動和液壓等不同能源驅動的爬桿機器人,可見爬桿機器人家族規模之大,而且通過不同功能以及不同能源的組合又可以誕生更多新型的爬桿機器人。像東京大學研制出了可以在多種環境下工作的,可以輕松跨越平行桿和繞L型桿爬行的關節型行走機器人。國內如清華大學也研發出了采用不同機構控制的爬桿機器人,但該機器人只可以單向爬行,并且局限過大、設備成本過高。
爬桿機器人種類眾多,但大多受到環境的局限,工作范圍受限,只能局限在一種特定的環境工作,像管道等特殊環境還無法進入進行工作。且設備成本以及維護成本過高、耗能過大也一個主要問題。目前國內外還沒能研制出工作范圍較萬能并且功率大耗能低的機器人,這類機器人需求很大。
1 氣動爬桿機器人的控制方案
本文根據人體肢體運動模擬人體爬行動作,設計出一種使用氣動作為清潔能源的仿人體爬行機器人實驗平臺。該設計采用西門子S7-200 PLC進行編程控制、昆侖組態軟件實現動態監控,使用電磁閥組與其他氣動元件組合,從而構建出一個優秀的控制監控系統,可以及時監控并反饋爬桿機器人的運動狀態,以實行高準確度的控制,提高精確度降低錯誤率[1]。系統結構如圖1所示。
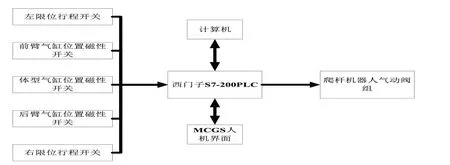
圖1 控制監控系統構圖
2 氣動爬桿機器人的結構
爬桿機器人的爬行結構是由多氣缸組合而成的,從而可以實現爬行運動,所有氣缸均具有高精度、短行程的特點。設計的爬桿機器人主要由三個部分組成[2]:前后臂爬行、夾緊結構、體形爬行結構,通過對前后臂的夾緊、釋放以及體形縮回伸出動作的配合進行控制實現機器人的爬行功能。氣動爬桿機器人采用了人體模擬設計,這個機器人由可移動形體、多個傳感器以及控制系統等組合而成,可以模擬人類和生物行為[3]。且該機器人使用了多種電磁閥進行組合實現控制,設有過行程緩沖裝置保護設備安全,同時設有限位行程開關裝置提供電信號反饋從軟件上保護設備安全[4],如圖2所示。
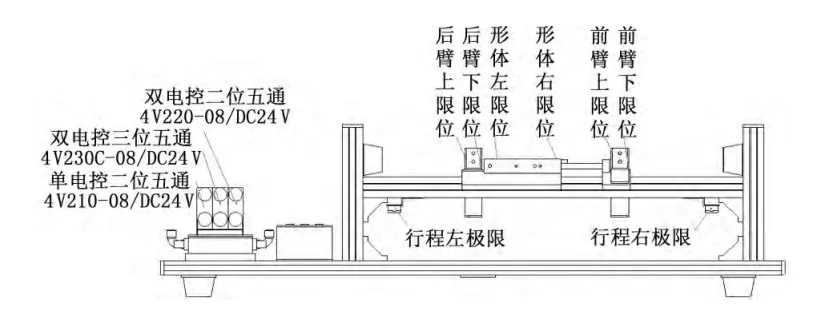
圖2 氣動爬桿機器人結構示意圖
3 爬桿機器人的硬件設計
3.1 電磁閥選型
采用亞德客4V 200系列的電磁閥,其接口口徑為8.5mm。工作特點:(1)安全性高;(2)操作簡單,性價比高;(3)運行速度快、功率較小、體態輕盈;(4)工作范圍受限;(5)種類多樣。這次設計爬桿機器人使用電壓為24V、電流為4.5A的電磁閥,實物如圖3所示。

圖3 電磁閥示意圖
3.2 爬桿機器人的氣缸
設計中采用了AIRTAC的2款氣缸,這2種氣缸結構精密,控制精度高[5]。第一種是超薄氣缸,安裝于爬桿機器人的前后臂,為爬桿機器人爬行時提供抓力;第二種氣缸是亞德客TR16X50-S型號的雙軸氣缸,安裝于機器人軀干部位,使機器人實現了體形縮回和伸出。爬桿機器人氣缸如圖4所示。

圖4 超薄氣缸和雙軸氣缸
3.3 氣動爬桿機器人的氣動控制系統
通過控制、執行、輔助元件以及氣源裝置共同組成氣動控制系統。爬桿機器人的氣動原理如圖5所示,其中B1-B6都是磁感應接近開關,分別位于前后臂氣缸的最上端和最下端以及體形氣缸的左右兩極限位置,其中前后臂都采用了相同的超薄氣缸,分別由3個電磁閥控制前臂、體形、后臂氣缸[6]。電磁閥裝在匯流板上構成電磁閥組,每個電磁閥都獨立工作。PLC的接線圖如圖6所示。

圖5 爬桿機器人的氣動原理圖
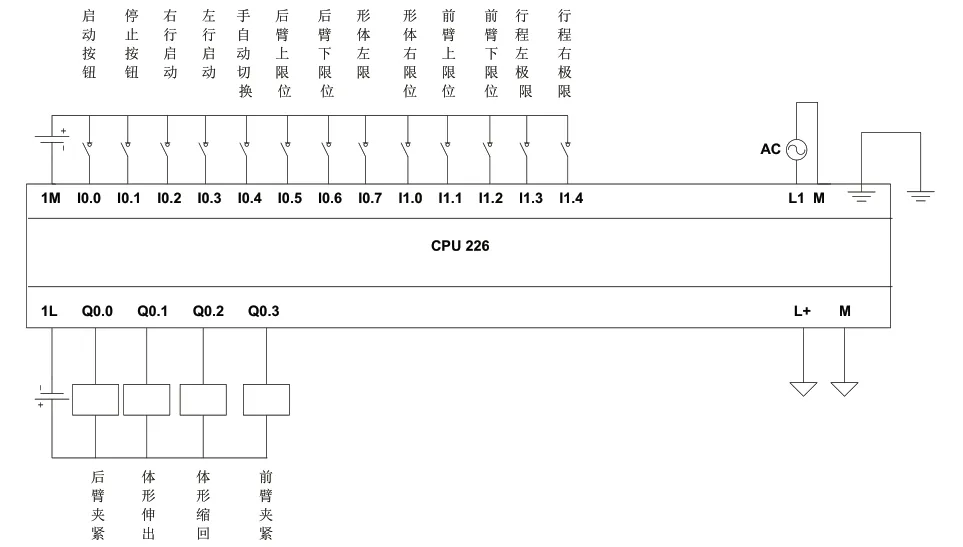
圖6 S7-226PLC接線圖
4 氣動爬桿機器人的軟件設計
4.1 PLC軟件的地址分配表與流程圖
氣動爬桿機器人在控制中采用PLC和觸摸屏結合的控制方式[7],PLC的地址分配包含實物硬件按鈕和觸摸屏軟按鈕,氣動控制閥分前臂加緊、后臂加緊、機器人形體伸出、機器人形體縮回,地址分配如圖7所示。

圖7 PLC地址分配表
軟件設計流程如圖8所示。系統進行初始化,按下啟動按鈕,機器人軀體向右爬行,若碰到右限位停止運動,到達右極限位置延時停止;機器人軀體向左爬行,到達左極限位置延時停止[8]。
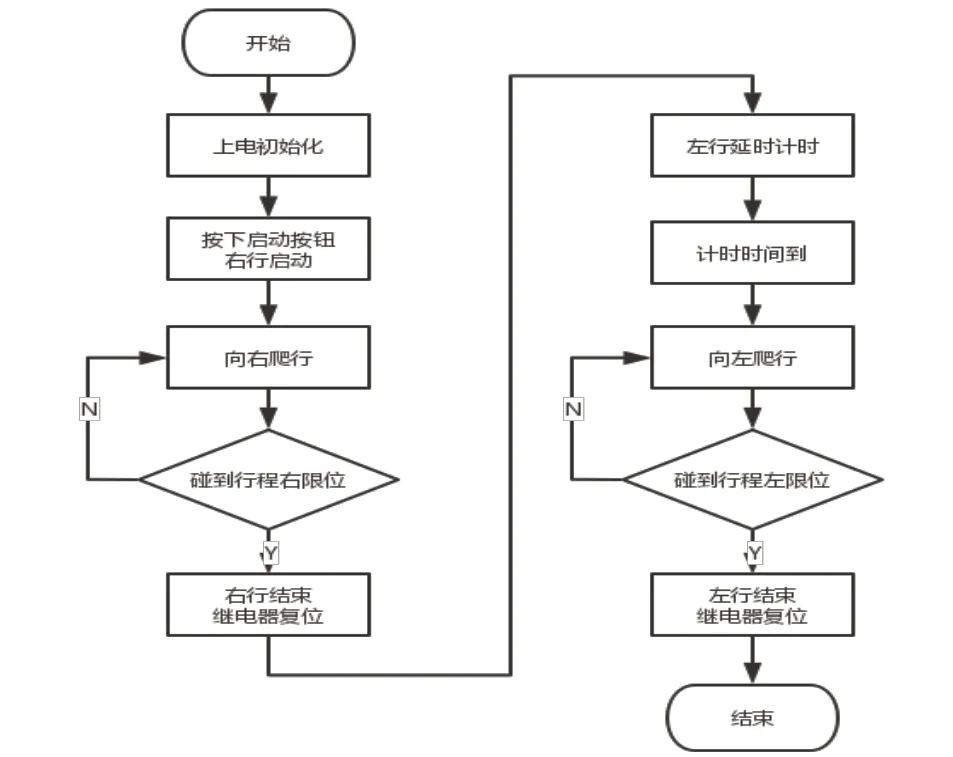
圖8 PLC程序流程圖
4.2 PLC程序設計
爬桿機器人向右運動爬行的程序如圖9所示。網絡3:爬桿機器人前臂夾緊、體形縮回2秒。網絡4:2s時間到后,爬桿機器人前臂夾緊、體形縮回復位且后臂夾緊、體形伸出。網絡5:爬桿機器人后臂夾緊、體形伸出2s。網絡6:2s時間到后,爬桿機器人后臂夾緊、體形伸出復位且前臂夾緊、體形縮回。網絡7:向右爬行,碰到行程右限位時,所有線圈復位,停止運行[9]。
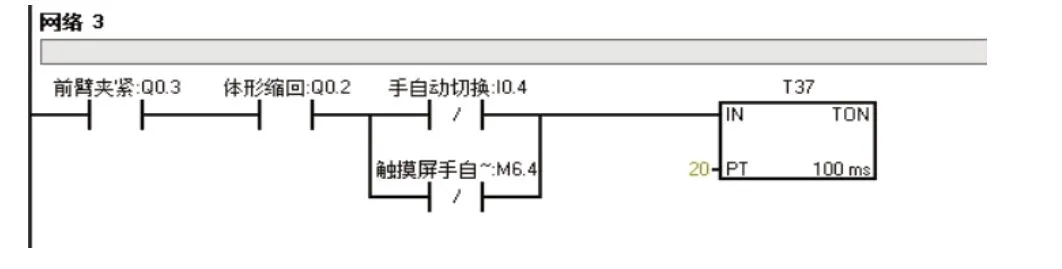

圖9 爬桿機器人向右運動爬行的程序
4.3 MCGS組態設計和通信
組態畫面如圖10所示,在畫面設置完成后進行通信連接,爬桿機器人控制器采用的是西門子200CPU226PLC。設置西門子通信端口為COM1,默認參數為波特率9600。采用MCGS觸摸屏作為系統人機界面,使用標準的PPI/PC通信電纜或者RS232轉換器進行PLC與組態串口的通信[10]。

圖10 爬桿機器人MCGS控制界面
5 結語
本文設計了一種基于西門子PLC和AIRTAC氣動元件的氣動爬桿機器人實驗臺。主要由前臂與后臂爬行結構、前臂和后臂夾緊結構、軀干結構、緩沖保護裝置、邊界保護裝置、多點定位傳感器、特殊爬升桿結構組成,氣動電磁閥組合及輸入輸出口接口模塊。這次設計的是在平面上擬人爬行的爬桿機器人,通過前后臂夾緊爬行以及體形伸出縮回結構完成機器人的爬行。本爬桿機器人實驗臺可以實現水平方向8m的往返運動,運動速度為140mm/min,在桿狀平臺上可以自由實現往返運動,運動速度可以調節。
爬桿機器人環保清潔,可以幫助人們完成特定的作業,是一種專門用于攀爬桿狀物的機器,可以協助或者代替人工完成一些高風險的作業,如電線桿、交通燈上的作業等。爬桿機器人還可對5~15m的桿狀物體表面上漆或者加上電鍍層。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50