基于多層感知機的遠距離水下聲源定位技術研究
2022-06-23 08:22:20鄭宇鴻徐佳毅文藝成李醒飛
導航定位與授時 2022年3期
關鍵詞:深度
鄭宇鴻,徐佳毅,2,3,文藝成,3,李醒飛,2,3
(1.天津大學精密測試技術及儀器國家重點實驗室,天津 300072;2.天津大學青島海洋技術研究院,青島 266200;3.青島海洋科學與技術試點國家實驗室,青島 266237)
0 引言
水下動態聲源的定位技術作為水下監管體系中的一項重要技術,被廣泛應用于海洋工程、海洋運輸和海防等領域。在傳統的定位技術中,匹配場處理(Matched Field Processing,MFP)技術作為一種依靠先驗知識的范圍搜索方法,在20世紀取得了廣泛的應用,在實際水域中實現了聲源被動定位。使用MFP進行聲源定位,可以在近距離獲得較為理想的定位精度,但是噪聲條件下遠距離定位失準以及搜索時間會隨著搜索間隔的增大而增大,使其缺點逐漸暴露。
由于MFP方法的局限性及近幾年機器學習理論和技術的新發展,一些基于機器學習的水聲被動定位方法開始重新嶄露頭角,相關研究和報道也陸續出現。Wang Y.等利用廣義回歸神經網絡,直接從歸一化樣本協方差估計聲源位置。Qin D.等將不同頻率數據的協方差矩陣分解為特征值,提取主特征值對應的特征向量作為長短期記憶(Long Short-Term Memory,LSTM)網絡的輸入特征。S.Whitaker 等在使用深度LSTM網絡的聲學定位方法中加入了用于定位的有序分類,降低了定位誤差。Jia Y.等提出了一種基于粒子群優化-廣義回歸神經網絡的深海聲源定位算法,該方法利用粒子群算法對廣義回歸神經網絡的參數進行優化,減少了人為確定的參數對廣義回歸神經網絡性能的影響。針對寬帶聲源定位問題,Niu H.等提出了一種基于大數據的深度學習方法,使用單個水聽器模擬的數據對殘差神經網絡進行訓練,在數據測試方面取得了較為理想的定位結果。Huang Z.等利用Kraken聲學工具模擬了真實的海洋環境,并利用174萬個傳播樣本獲得協方差矩陣,而后進行特征值分解,將特征值矩陣對深度神經網絡(Deep Neural Network,DNN)和直接利用時域信息對卷積神經網絡(Convolution Neural Network,CNN)進行訓練,并在DNN上獲得了更好的定位精度。Liu Y.等提出了一種直接以自相關函數作為卷積神經網絡的輸入特征用于聲源定位,避免了人工提取的延遲路徑難以確定的過程。蘇林等研究了不同深度聲源的匹配場定位對聲速剖面失配的敏感性。這些工作大多都在聲源與接收器距離較近的條件下取得了理想的定位效果,但大部分工作并未考慮聲速剖面失配對定位精度的影響,且至今較少有在遠距離條件下開展聲源被動定位的研究,以及利用機器學習算法探究剖面失配對遠距離定位的影響。
本文提出了一種基于雙層非線性輸出的多層感知機(Multi-Layer Perceptron,MLP)遠程聲源被動定位方案,可在距離以及深度方向對聲源進行被動定位。在水下模擬布設垂直水聽器陣,利用團隊自研的“浮星”浮標實測得到的聲速剖面數據對海洋環境進行重新模擬,仿真大量不同距離和深度的寬頻帶聲源在水聽器處產生的波形信號以及頻域聲壓數據,并對頻域聲壓數據進行MFP定位。由于MFP定位方法存在不足,因此利用波形信號數據對設計的多層感知機進行訓練,并利用訓練后的多層感知機進行定位,在450~550km遠距離水下,信噪比為30dB時距離和深度平均絕對誤差分別為8.31km和2.17m,平均絕對誤差比在聲速剖面失配的情況下分別降低了13.53%和1.81%。
1 水聲數據獲取
在1970年末,存在著廣泛用于預測海洋聲傳播的幾種常規模型,但各自都有其自身的問題。典型的困難包括:1)對于某些類型的聲速剖面的數值計算不穩定;2)無法計算完整的海洋模型。為了解決這些問題,海洋聲傳播理論開始建立Kraken范式模型的基礎。
1.1 Kraken簡正波模型
Kraken海洋聲場模型采用有限差分方法解簡正波方程,可以快速得到精確解。它將整個海水深度劃分為個等間隔的寬度=,相應地得到+1個點。采用有限差分近似,可以將簡正波方程的連續問題化為線性代數中的特征值問題。根據絕熱假設和WKB(Wenzel Kramers Brillouin)近似,可以得到波壓力場的解

(1)
其中,為虛數單位;表示聲源與接收器的水平距離;為聲源深度;為接收器深度;為模式數,范圍為(0,∞);和分別為第階簡正波模態的本征函數和本征值。
傳播損失定義如下

(2)
其中,定義如下
(3)
其中,為水平波數;表示聲源在自由空間中的聲壓。忽略傳播過程中的介質吸收,水聽器接收信號的信噪比(Signal-to-Noise Ratio,SNR)定義如下
()(dB)=()-()-()
(4)
其中,表示聲源級;表示噪聲級。
1.2 數據描述
為了評估提出的多層感知機在聲源被動定位中的表現,并與傳統的匹配場方法進行對比,需要利用Kraken模擬真實海洋聲場環境并生成相應數據,其中仿真的海洋聲場環境模型如圖1所示。
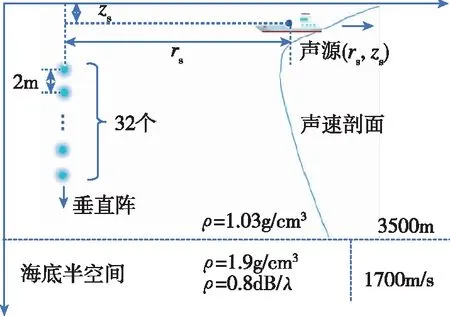
圖1 海洋聲場環境模型仿真
垂直陣由32個水聽器組成,水聽器的間隔為2m,布設于海深1~63m的范圍。海水深度為3500m,海水密度為1.03g/cm,海底半空間的聲速為1700m/s,密度為1.9g/cm,衰減系數為0.8dB/。由于以往的工作未確定多日內的剖面數據是否對定位更有價值,因此本文對此進行驗證。剖面數據是海洋聲場環境的一個重要參數,將影響生成的接收數據,而接收數據又會影響定位算法的魯棒性。為探究聲速剖面的精準性對定位的影響,在不同聲速剖面的條件下記錄水聽器的數據,其中一組為團隊自研的“浮星”浮標于西太平洋1天內實測的聲速剖面數據,看作是失配聲速剖面;另一組為團隊自研的“浮星”浮標于西太平洋30天內實測的平均聲速剖面數據,兩者都利用線性插值得到平滑的聲速剖面。實測的30天內的0~3500m聲速剖面如圖2所示,失配聲速剖面和平均聲速剖面如圖3所示。團隊自研的“浮星”浮標于西太平洋1天內實測以及30天內實測的聲速剖面數據都應用于海洋聲場環境模型仿真實驗中。
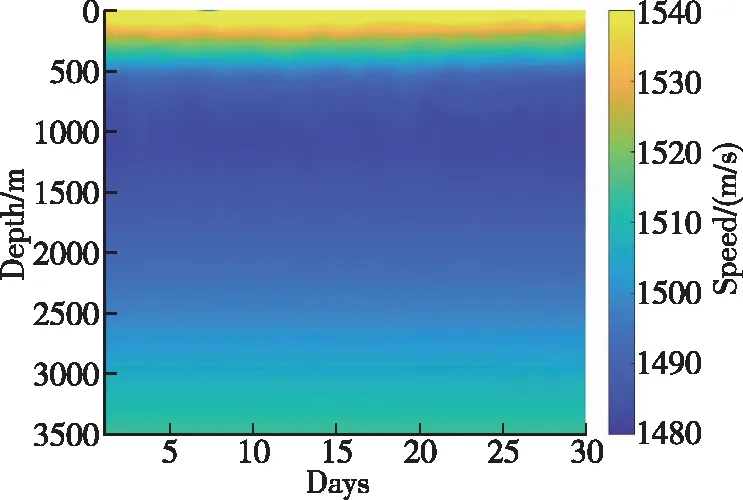
圖2 30天內0~3500m聲速剖面
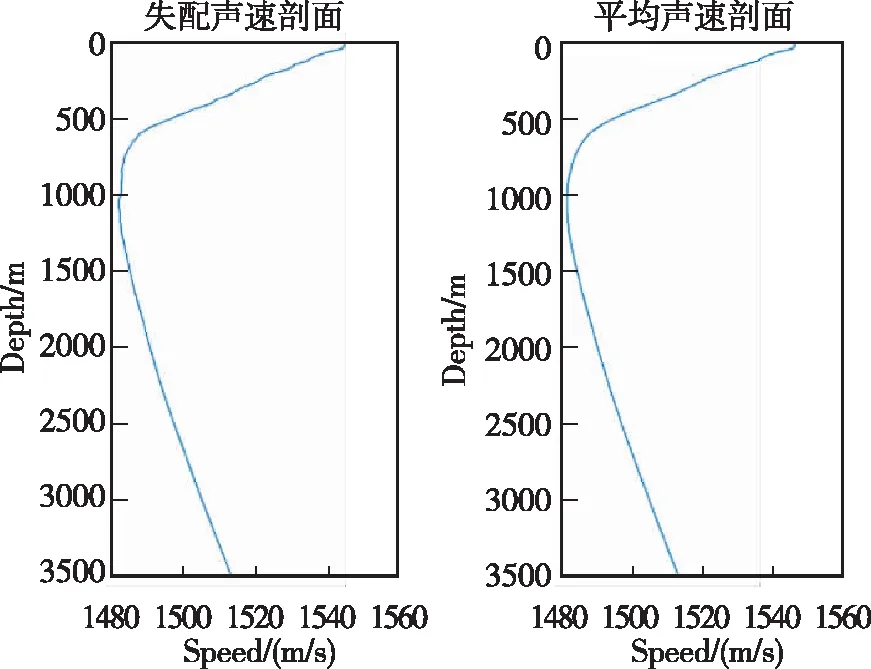
圖3 失配聲速剖面和平均聲速剖面
聲源在距離水聽器450~550km處運動,運動深度范圍為15~55m,在水平上每間隔100m仿真一次水聽器收集的聲壓數據,100km內共采集10001組聲壓數據。仿真信號的帶寬為50~500Hz,信號采樣頻率為20000Hz,信號幀長為0.01s,聲源級為235dB。
2 聲源被動定位算法
2.1 MFP技術
MFP的定位原理如圖4所示。首先利用水聽器接收得到的頻域信號計算采樣協方差矩陣,假設在聲場區域內存在聲源位置,則可利用已知海洋聲場模型計算這片區域的聲源在水聽器處產生的拷貝場向量。利用匹配處理器計算拷貝場和測量場之間的相關矩陣,得到模糊平面,當實際目標位置與假設位置一致時,可通過計算模糊平面的最大值所在位置得到聲源的位置。
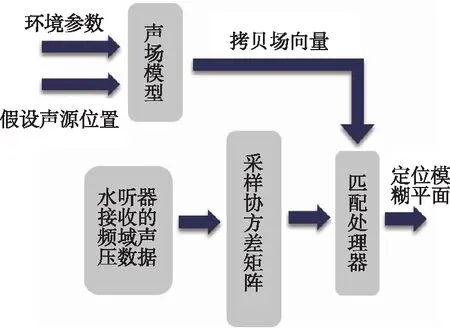
圖4 MFP定位原理
最小方差匹配處理器定義如下

(5)

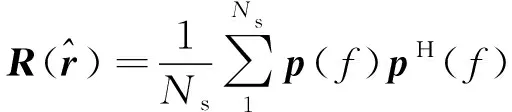
(6)
其中,為快拍數。對于海洋聲信道,水聽器接收的頻域聲壓()定義如下

(7)
2.2 基于雙層非線性輸出的MLP網絡設計
利用機器學習網絡能夠表征復雜的非線性關系特性。由于匹配場處理為搜索算法,因此對計算資源十分依賴,且隨著接收距離增大依賴也逐漸增大,為此本文設計了基于聲壓數據訓練的MLP網絡。MLP也稱為人工神經網絡,本文設計的MLP網絡除了輸入輸出層,中間還含有一個隱含層,結構如圖5所示。
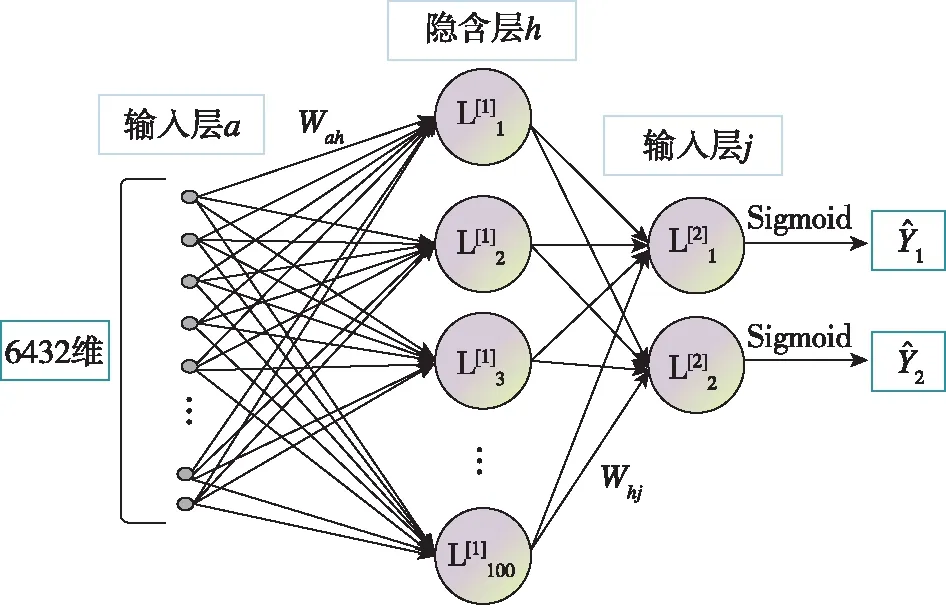
圖5 MLP網絡設計
該MLP網絡輸入維度為6432,輸入層和隱含層采用的激活函數為ReLu,ReLu可避免訓練時網絡出現梯度飽和,ReLu函數定義如下
ReLu()=max(0,)
(8)
輸出層采用雙層設計,分別對應輸出距離和深度的特征值,因此采用Sigmoid函數,使得輸出特征值落于0~1范圍內,Sigmoid激活函數定義如下
(9)
在設計的MLP中,誤差反向傳播的原理為利用輸出后的誤差估計網絡前一層的誤差,并以此進行逐層反向傳播。在此采用的誤差函數為均方誤差,定義如下

(10)

(11)

(12)


(13)


(14)

(15)
于是可以將誤差反向傳播算法推廣至任意層的權重修正量,定義如下
(16)
其中,表示待更新權重所連接的上一節點輸出;表示所指向節點的誤差,由下一層計算所得。
3 仿真驗證
在匹配場處理算法仿真中,計算拷貝場所取的簡正波模式數為前50,在深度上的搜索間隔為2m,覆蓋海深1~63m。鑒于水聽器與聲源間的距離,在距離上的搜索間隔為1km,覆蓋距離300~700km,匹配處理器的搜索間隔與此相同,一共有10個頻率點用于計算最小方差匹配處理器的輸出,覆蓋50~500Hz的帶寬,最終模糊平面最大值的位置即為聲源的預測位置。
在MLP算法仿真中,可訓練樣本總計超過100萬組,包含兩種剖面、不同信噪比情況下生成的數據,每個聲源位置對應一組數據樣本,為32個通道在時域上拼合而成的數據,每個通道含201個數據點。圖6所示為聲源位置處于深度15m,距離水聽器450km時模擬對應的前10通道的波形數據(在無噪聲以及加入高斯白噪聲使其信噪比為5dB,平均聲速剖面情況下)。

圖6 水聲波形數據模擬
鑒于匹配場處理對計算資源的依賴,首先在信噪比60dB下模擬得到的10001組數據中抽取100組數據,供兩種算法進行測試驗證。為對比MFP、MLP兩種算法的定位效果,利用總樣本數據對MLP網絡進行訓練,訓練時總數據的80%用作訓練集,余下的作為測試集,優化器為帶有動量機制的隨機梯度下降(Stochastic Gradient Descent,SGD),使得梯度改變的方向更為平滑,即在式(16)中引入一個中間量,總體SGD定義如下
(17)
其中,初始值為0;動量為0.9;學習率為0.01。訓練300個世代,訓練精度定義如下
(18)
其中,MRE為平均相對誤差,為2,代表距離和深度兩個方向,MRE定義如下
(19)

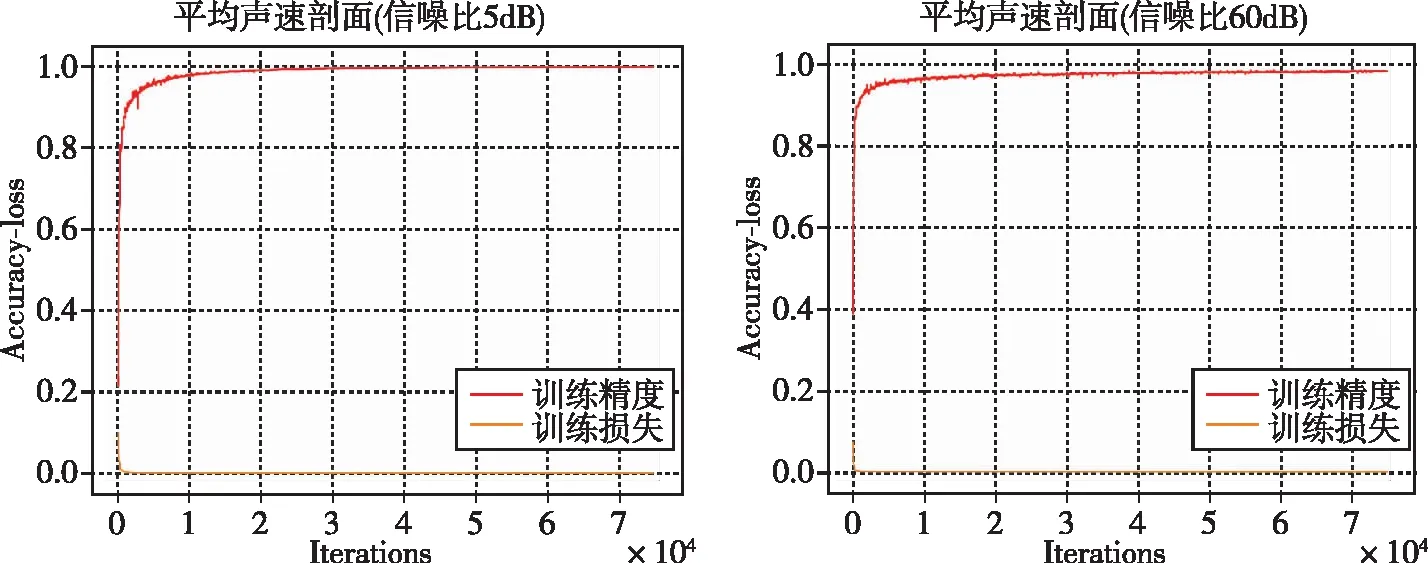
圖7 訓練迭代圖
可以注意到,在兩種情況下經過較少迭代次數后網絡就達到了收斂。在平均聲速剖面的條件下,對兩種算法在信噪比60dB下進行了100次定位實驗,預測位置與實際位置的對比如圖8所示。
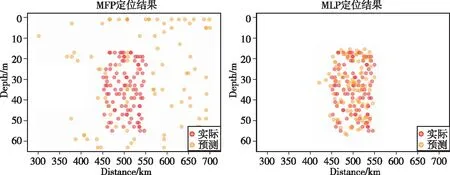
圖8 算法定位結果對比
其中,紅色點為實際位置,橙色點為預測位置,可以直觀地得出:MLP定位效果大幅度提高。為定量比較定位結果,引入平均絕對誤差MAE,定義如下
(20)
兩種算法在信噪比60dB的情況下,MAE和MRE的定量對比如表1所示。無論是在距離或者深度的定位誤差上,MLP都比MFP減少了1個數量級,且MLP的推理為矩陣的并行運算,2000組特征的推理只需在1s內即可完成,且推理時間在一定范圍內不會隨著輸入特征數的增多而增大。MFP對一個位置的定位時間在百秒以上,若MFP的掃描范圍超出300~700km,定位時間還會隨著掃描范圍的增大而增大,而MLP直接由輸入特征即可得到定位結果。

表1 MFP/MLP算法定位精度對比
為比較MLP在不同信噪比以及不同聲速剖面條件下對聲源運動軌跡的擬合能力,將測試集輸入MLP進行測試,得到定位散點擬合圖,如圖9所示。
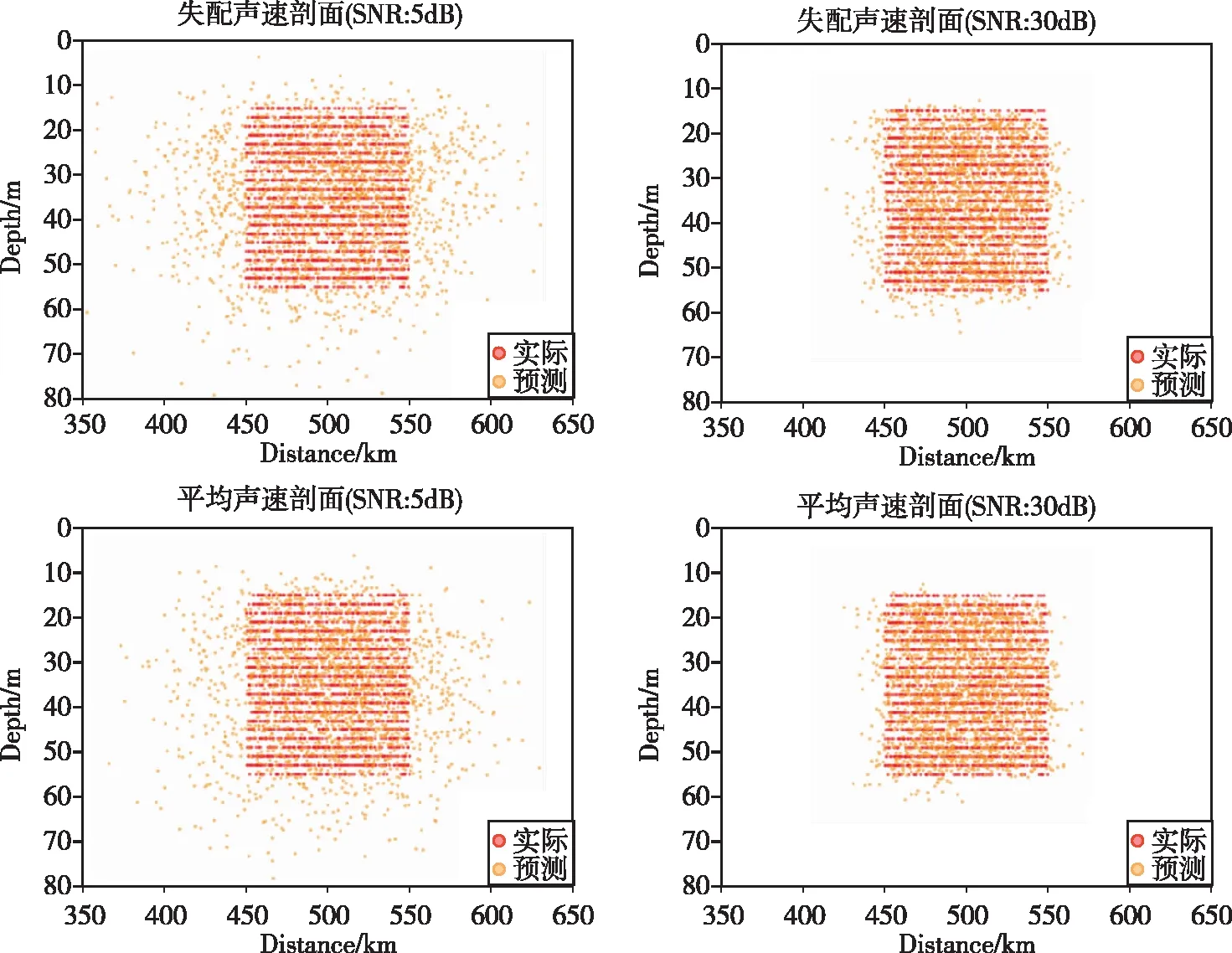
圖9 運動軌跡定位散點圖
使用大量的數據進行測試,從散點圖可知,信噪比較低情況下,MLP仍有較強的擬合能力;可以注意到,使用平均聲速剖面條件下測試所得的散點更有往真實位置靠攏的趨勢。表2所示為在不同剖面類型以及不同信噪比條件下測試集在MLP網絡上的誤差定量比較,平均聲速剖面下的定位誤差在信噪比5dB和30dB情況下都比失配剖面的小,且在信噪比5dB時,失配剖面下的定位誤差比平均聲速剖面下、信噪比60dB時的MFP定位效果更好。

表2 不同信噪比、不同剖面下MLP網絡誤差定量比較
利用信噪比范圍為0~60dB的波形數據對MLP網絡進行訓練測試,得到不同剖面條件下平均相對誤差隨信噪比變化的曲線,如圖10所示。
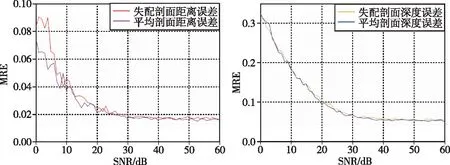
圖10 不同信噪比、不同剖面下MLP定位誤差
隨著信噪比的增大,距離以及深度方向上的平均相對誤差逐漸降低。目前普遍認為聲速剖面可以看作在一段時間內是不隨時間變化的,但是相比失配聲速剖面,使用平均聲速剖面可以使得算法在大范圍的信噪比內取得更好的定位效果。因此,長時間測量的浮標可以為我們帶來更有價值的剖面數據。
4 結論
本文針對遠距離條件下的水下聲源定位,設計了一個雙層非線性輸出的MLP網絡,由仿真結果可知:
1)利用在一定海洋環境下模擬生成的聲場數據對MLP進行訓練,并將其對聲源進行定位,解決了傳統MFP算法遠距離定位不準以及耗費時間長的問題。
2)利用團隊自研的“浮星”浮標實測的聲速剖面數據,驗證了相較于失配聲速剖面,30天平均聲速剖面仿真的海洋環境條件可以使得MLP網絡在距離以及深度方向上取得更好的定位效果。
3)在信噪比動態變化的情況下,使用平均聲速剖面獲得了更低的定位平均相對誤差,為在實際的海洋聲源被動定位中應用奠定了基礎。
4)本文的聲場數據是在理想海洋建模條件下獲得的,忽略了介質傳播吸收以及海面的環境情況,適用于文中模擬的海洋聲場環境,針對不同海域的參數模擬以及真實海洋環境的聲場數據收集是以后工作的重點。
5)在后續的實際海試中,需要記錄聲源在不同位置時水聽器接收陣接收的聲壓數據,并記錄下聲源的實際位置,為了獲取足夠的訓練數據,還需要進行足夠的海試。
6)后續可生成其他海域條件下模擬的接收數據,并聯合海試數據共同對MLP網絡進行訓練,以增加網絡的泛化性。在無法模擬真實海洋聲場時,MFP算法將無法使用,因此更加突出了此類依靠大數據的機器學習網絡的重要性。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57