AGV調(diào)度系統(tǒng)中的通訊方案設(shè)計與實現(xiàn)
2022-06-27 08:29:18公建寧康照奇
制造業(yè)自動化 2022年3期
關(guān)鍵詞:系統(tǒng)
陳 展,公建寧,劉 洋,康照奇
(1.機械科學(xué)研究總院,北京 100044;2.機科發(fā)展科技股份有限公司,北京 100044)
0 引言
隨著數(shù)字化車間和現(xiàn)代化智能輸送系統(tǒng)的自動化、集成化和智能化的不斷提高,自動導(dǎo)引車(Automated guided vehicles,AGV)系統(tǒng)在汽車家電制造、倉儲物流電商等領(lǐng)域,在提高物料運輸效率的同時,有效降低了物料的運輸成本,其產(chǎn)品、技術(shù)及解決方案具有日益廣泛的應(yīng)用場景。
1 簡介
AGV控制系統(tǒng)可分為集中控制系統(tǒng)和分布式控制系統(tǒng),而相比于AGV分布式控制系統(tǒng),前者系統(tǒng)中的AGV能夠通過上位機指令,實現(xiàn)工廠模型中的規(guī)劃路徑行駛,在車輛調(diào)度、路徑優(yōu)化等方面更為成熟和穩(wěn)定。工業(yè)應(yīng)用中的AGV項目方案,考慮實際需求一般采用集中式控制系統(tǒng),而集中式的AGV控制系統(tǒng)主要包括中央調(diào)度控制系統(tǒng)和車載控制系統(tǒng)兩部分。中央調(diào)度控制系統(tǒng)負(fù)責(zé)任務(wù)調(diào)度、路徑規(guī)劃和交通管理,車載控制器負(fù)責(zé)完成下發(fā)任務(wù)的執(zhí)行、導(dǎo)航運動和充電安全等方面的控制[1]。AGV系統(tǒng)完成作業(yè)離不開兩個控制系統(tǒng)的協(xié)同運行,而通訊系統(tǒng)在AGV車載控制系統(tǒng)和中央調(diào)度控制系統(tǒng)之間的信息收發(fā)過程中起著不可或缺的重要作用。
本文的主要內(nèi)容包括:
1)基于802.11g標(biāo)準(zhǔn)協(xié)議的WLAN技術(shù)構(gòu)建了一個完整傳輸速率高的無線局域網(wǎng)絡(luò),完成AGV與調(diào)度系統(tǒng)應(yīng)用層軟件所在的上位機通過TCP/IP的收發(fā)通訊。
2)完整定義中央控制系統(tǒng)與各AGV的車載控制系統(tǒng)的雙向通信協(xié)議內(nèi)容,包括:AGV上下線、訂單任務(wù)下發(fā)、移動指示燈光、AGV電量速度、AGV位置姿態(tài)和手動控制轉(zhuǎn)換。
3)針對AGV的集中式控制系統(tǒng)通訊壓力大的問題,分析上位機軟件體系結(jié)構(gòu),增設(shè)AGV車載通訊適配器的通訊模塊。
2 方法
AGV集中控制系統(tǒng)的通訊結(jié)構(gòu)如圖1所示,在AGV的集中式控制系統(tǒng)中,中央調(diào)度控制系統(tǒng)與各AGV進行雙向通信,各AGV之間不互相通信[2]。

圖1 通訊系統(tǒng)結(jié)構(gòu)
2.1 通訊結(jié)構(gòu)設(shè)計
常用的無線通信方式有無線局域網(wǎng)(WLAN)、Zigbee、藍(lán)牙(Bluetooth)、紅外(Ir DA)技術(shù)和超寬帶(UWB)技術(shù)等。設(shè)計方案為提升AGV系統(tǒng)運行時數(shù)據(jù)通訊的實時性、可靠性和穩(wěn)定性,并考慮AGV系統(tǒng)干擾源多、系統(tǒng)需要遠(yuǎn)程通訊的工作環(huán)境要求,整理比對了各頻段協(xié)議的傳輸最大速率、覆蓋范圍和應(yīng)用價格,如表1所示[3]。

表1 協(xié)議對比結(jié)果
根據(jù)分析,方案設(shè)計選擇基于802.11g標(biāo)準(zhǔn)的WLAN技術(shù)來完成AGV通信系統(tǒng)的網(wǎng)絡(luò)架設(shè),傳輸速率較大,有效工作距離遠(yuǎn)超Zigbee和藍(lán)牙,且IEEE802.11g與IEEE802.11bWi-Fi系統(tǒng)具有良好的兼容性,適用于功率較大的AGV系統(tǒng)網(wǎng)絡(luò)。
WLAN的通信傳輸協(xié)議包括TCP協(xié)議和UDP協(xié)議。TCP(Transmission Control Protocol)為用戶提供了一種面向連接且基于字節(jié)流的通信連接;UDP(User Datagram Protocol)提供的是面向非連接的數(shù)據(jù)傳輸,與TCP協(xié)議不同的是,可直接進行數(shù)據(jù)收發(fā)而不需要雙方首先建立連接。UDP協(xié)議的數(shù)據(jù)收發(fā)不受連接限制,因而具備更高的通信效率,但不可避免地降低了UDP協(xié)議傳輸數(shù)據(jù)的可靠性[4]。在上位機和AGV小車正式收發(fā)數(shù)據(jù)前,要求雙方先建立可靠的連接。綜合考慮AGV系統(tǒng)通訊系統(tǒng)的實時性和工作環(huán)境需求,通訊方案選擇更為成熟的TCP傳輸協(xié)議搭建系統(tǒng)無線通訊網(wǎng)絡(luò)。
WLAN的組網(wǎng)方式靈活,常用的WLAN網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)有IBSS和ESS拓?fù)浣Y(jié)構(gòu)。
IBSS(Independent Basic Service Set,獨立基本服務(wù)集)網(wǎng)絡(luò)結(jié)構(gòu)的連接方式中,其拓?fù)浣Y(jié)構(gòu)簡單,易維護,該結(jié)構(gòu)下各個AGV互相之間都可通過無線網(wǎng)卡進行相互之間通信,但存在AGV間信道共用問題,適合AGV分布式控制系統(tǒng);ESS(Extent Service Set,拓展服務(wù)集)網(wǎng)絡(luò)包含多個無線AP,連入網(wǎng)絡(luò)的AGV在進行數(shù)據(jù)通訊的同時,還支持AP間對頻率和空間的重利用,該結(jié)構(gòu)能夠充分適用于AGV集中控制系統(tǒng)的網(wǎng)絡(luò)通訊需求[5]。
為了提高無線網(wǎng)絡(luò)連接的安全性和穩(wěn)定性,預(yù)先分配路由器的IP地址范圍,設(shè)置系統(tǒng)通訊的地址池,對接入該無線網(wǎng)絡(luò)的AGV分配靜態(tài)的IP地址,將AGV對應(yīng)的MAC
地址與固定的IP地址綁定,方便上位機的服務(wù)器根據(jù)IP地址識別登記相應(yīng)的AGV[6]。
2.2 通訊內(nèi)容定義
在工業(yè)環(huán)境現(xiàn)場,AGV機器人主要通過自動出入裝卸站、工作臺和貨架等定義單元,完成物料入庫、出庫等操作的搬運輸送,可以充分適應(yīng)工作時間長、搬運量大等要求[7]。中央調(diào)度控制系統(tǒng)和AGV車載控制系統(tǒng)的具體通訊流程如下:
1)建立連接:上位機調(diào)度控制系統(tǒng)接受MES系統(tǒng)響應(yīng)后,通過通訊系統(tǒng)的與空閑狀態(tài)的AGV建立訂單聯(lián)系,并檢驗該AGV是否可以處理對應(yīng)訂單。
2)訂單命令:AGV可以處理對應(yīng)訂單,上位機開始逐段下發(fā)移動指令,AGV回復(fù)確認(rèn)數(shù)據(jù)。為提高AGV行駛狀態(tài)的流暢性,運行在下發(fā)行駛路段的同時,提前下發(fā)預(yù)分配線段。
3)信息更新:AGV通過無線網(wǎng)絡(luò)向上位機發(fā)送當(dāng)前位置和狀態(tài),上位機將所接收的數(shù)據(jù)更新存儲,釋放路徑資源。
4)心跳包:AGV定時發(fā)送小車位置及狀態(tài)的實時數(shù)據(jù),用以檢測AGV與上位機的穩(wěn)定通信,防止系統(tǒng)連接掉線[8]。
5)訂單回復(fù):AGV主動上報已經(jīng)到達訂單目的地,完成裝貨、卸貨或充電的操作指令。
6)訂單結(jié)束:上位機回復(fù)AGV完成訂單的主動回復(fù),繼續(xù)下發(fā)訂單或?qū)⒃揂GV泊車。
通訊系統(tǒng)傳輸收發(fā)的標(biāo)準(zhǔn)數(shù)據(jù),定義在協(xié)議報文的數(shù)據(jù)包中,車載通訊系統(tǒng)向上位機發(fā)送數(shù)據(jù)為上行,上位機向車載通訊系統(tǒng)發(fā)送數(shù)據(jù)為下行。協(xié)議以定長字節(jié)數(shù)組數(shù)據(jù)包形式發(fā)送。
報頭占用1個字節(jié),OxAA判斷為該段數(shù)據(jù)包報文的起點。主要是防止因接收錯誤報文導(dǎo)致的系統(tǒng)錯誤問題,方便在傳輸數(shù)據(jù)包時,數(shù)據(jù)的識別匹配。
功能碼占用1個字節(jié),定義如表2所示。

表2 功能碼
依據(jù)不同的功能碼,車載控制系統(tǒng)會對協(xié)議報文進行相對應(yīng)的解析與處理。
AGV車號ID段占用高低位2個字節(jié),用于上位機判別數(shù)據(jù)包的來源AGV,并將要下發(fā)的數(shù)據(jù)精確地送達指定AGV;
AGV位置占用高低位2個字節(jié),用于上位機控制系統(tǒng)車載控制系統(tǒng)相互對標(biāo),并為系統(tǒng)的實時運轉(zhuǎn)狀態(tài)提供可靠依據(jù)。
AGV電量占用高低位2個字節(jié),用于中央調(diào)度控制系統(tǒng)評估任務(wù)訂單的下發(fā)和及時為蓄能不足的AGV下發(fā)自動充電指令,以維持系統(tǒng)的高效穩(wěn)定運行。
AGV是否可以處理下發(fā)訂單的狀態(tài)回復(fù)占用1個字節(jié),用以二次確認(rèn)AGV的狀態(tài),避免訂單的無效下發(fā)。
動作指令段占用1個字節(jié),包含的定義動作指令如表3所示。

表3 動作指令表
AGV路徑線段的下發(fā)占用4個字節(jié),用于下發(fā)下一目的點對應(yīng)的前后兩條路徑線段。提前發(fā)出的第二條路徑線段用以保證AGV運行狀態(tài)的流暢度。指令依據(jù)中央調(diào)度系統(tǒng)路徑資源分配機制,依次分段下發(fā),且每次都需要上行確認(rèn),以期及時釋放路徑資源。直到完成該訂單所規(guī)劃的包含路徑為止。
上下行指令及響應(yīng)幀格式如表4和表5所示。

表4 下行報文

表5 上行報文
報文校驗段占用兩字節(jié),用于校驗所傳輸?shù)臄?shù)據(jù)中準(zhǔn)確性,判斷是否存在錯誤數(shù)據(jù)。報文協(xié)議采用CRC校驗,以提高系統(tǒng)通信的可靠性[9]。
報尾占用1個字節(jié),OxBB判斷為該段數(shù)據(jù)包報文的終點。
2.3 通訊適配器
上位機調(diào)度控制系統(tǒng)基于開源組織架構(gòu)open TCS,針對AGV的集中式控制系統(tǒng)通訊壓力大的問題,分析上位機軟件體系結(jié)構(gòu),用Java編程語言編寫通訊適配器,完成對系統(tǒng)通訊模塊的集成開發(fā)。
軟件框架如圖2所示。

圖2 軟件框架圖
openTCS支持的通訊適配器,主要實現(xiàn)于特定的自動導(dǎo)引車、非連續(xù)的運輸機等的通信協(xié)議,作為內(nèi)核和執(zhí)行設(shè)備之間的中介。AGV通訊通訊器的實現(xiàn)步驟如下:
1)創(chuàng)建子類Vehicle CommAdapter:繼承BasicVehicleCommAdapter實現(xiàn)命令隊列管理;在派生類中realvehicle的抽象方法;調(diào)用comm適配器模型上的相應(yīng)方法setVehiclePosition()和commandExecuted()等,當(dāng)受控AGV報告狀態(tài)和訂單作業(yè)時,反饋內(nèi)核kernel。
2)創(chuàng)建VehicleCommAdapterFactory工廠類,依次為實例化VehicleCommAdapter給定的AGV對象。
3)為通訊適配器創(chuàng)建Guice模塊KernelInjectionModule。注冊并綁定VehicleCommAdapterFactory,以用于openTCS的java.util.ServiceLoader服務(wù)項在啟動時自動查找Guice模塊。
4)在CommProtocol類中,定義協(xié)議基本內(nèi)容和觸發(fā)機制。
5)啟動上位機調(diào)度系統(tǒng)open TCS的內(nèi)核之前,將通訊適配器的JAR文件及其他資源放在內(nèi)核kernel應(yīng)用程序安裝目錄的子目錄中。保證kernel.bat的啟動腳本在應(yīng)用程序的類路徑中包含該目錄中的所有JAR文件,啟動內(nèi)核時,可以自動搜索找到滿足要求的通訊適配器。
3 實驗
實驗設(shè)備主要包括一臺上位機PC,兩臺自然導(dǎo)航方式AGV,一臺無線路由器等。
利用Gradle構(gòu)建工具,編譯生成內(nèi)核、內(nèi)核控制中心和執(zhí)行軟件,依次啟動kernel.bat、kernelcontrolcenter.bat和plantoverview.bat的啟動腳本,上線測試AGV,并在內(nèi)核控制中心加載real vehicle的通訊適配器,如圖3所示。

圖3 通訊適配器
AGV基本配置參數(shù)如表6所示。

表6 AGV配置參數(shù)
無線路由器選用TL-WDR5620千兆易展版,部分規(guī)格參數(shù)如表7所示。

表7 路由器規(guī)格參數(shù)
通訊系統(tǒng)基于上位機調(diào)度管理軟件openTCS,設(shè)計滿足激光導(dǎo)航、磁導(dǎo)航和自然導(dǎo)航等導(dǎo)航方式AGV移動機器人的運行過程,在實驗室研究的自然導(dǎo)航AGV的基礎(chǔ)上,進行AGV通訊系統(tǒng)的現(xiàn)場測試,驗證本文研究方案的可行性,如圖4所示。
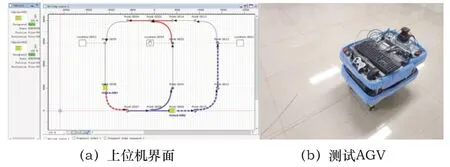
圖4 實驗測試
經(jīng)實驗驗證,中央調(diào)度控制系統(tǒng)和車載控制系統(tǒng)在工作運行時能夠滿足正常有效通訊,AGV系統(tǒng)能夠依需完成訂單作業(yè)。
4 結(jié)語
隨著企業(yè)智能制造的不斷改造和升級,AGV等移動機器人扮演著相當(dāng)重要的角色,隨著5G時代和工業(yè)4.0的發(fā)展到來,AGV的模塊化設(shè)計研究,可以有效縮短開發(fā)周期,更能適應(yīng)各種使用需求,本文的通訊系統(tǒng)方案就是采用模塊化的設(shè)計方法,能夠根據(jù)具體的使用要求,組合AGV的其余功能模塊,開發(fā)設(shè)計不同系列的物流解決方案[10]。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
