基于無跡變換的協(xié)同探測與速度方向控制制導(dǎo)律一體化設(shè)計
2022-07-01 10:08:30丁力全孟凡坤白顯宗戴智洋
彈道學(xué)報 2022年2期
關(guān)鍵詞:方法
丁力全,吳 楠,孟凡坤,白顯宗,戴智洋
(1.解放軍信息工程大學(xué) 數(shù)據(jù)與目標(biāo)工程學(xué)院,河南 鄭州 450000;2.興城特勤療養(yǎng)中心,遼寧 葫蘆島 125105;3.軍事科學(xué)院 國防科技創(chuàng)新研究院,北京 100071)
單飛行器探測具有探測精度低、抗干擾能力弱、躲避攻擊能力差、跟蹤目標(biāo)能力不足、殺傷力小等弱點。而利用飛行器進行協(xié)同探測,可以有效地改善單飛行器探測存在的弊端,飛行器協(xié)同探測也成為了近年來的研究熱點。當(dāng)前,對于協(xié)同探測研究的主要處理方法是利用信息融合技術(shù)進行數(shù)據(jù)處理,對于制導(dǎo)律的研究多是建立在目標(biāo)已知的情況下進行的。
再入飛行器(如機動彈頭等)返回大氣層時,受到升力和阻力影響,如果不對其進行控制,很可能發(fā)生脫離標(biāo)準(zhǔn)軌跡等情況,因此,飛行器的制導(dǎo)設(shè)計尤為重要。當(dāng)前,協(xié)同制導(dǎo)的方法大致可分為開環(huán)式和閉環(huán)式兩種方式。開環(huán)式制導(dǎo)方式指飛行器之間沒有信息的交互,是各飛行器之間按照自身制定好的制導(dǎo)方式進行飛行。閉環(huán)式制導(dǎo)方式更注重的是多飛行器之間的信息交互與傳輸,通過信息的共享完成協(xié)同制導(dǎo)。因此閉環(huán)式的方式更加貼合實際,更具有研究和應(yīng)用意義。
在閉環(huán)式制導(dǎo)中,包含集中式協(xié)同和分布式協(xié)同兩種制導(dǎo)方式。集中式協(xié)同方式是將各飛行器的數(shù)據(jù)傳送至其中一個飛行器(主飛行器)中,從而實現(xiàn)信息的共享。分布式協(xié)同方式是相鄰飛行器之間實現(xiàn)信息互通,通過一定的規(guī)則進行制導(dǎo)。集中式制導(dǎo)方式的精確程度要高于分布式制導(dǎo)方式,但在通信要求、穩(wěn)定性等方面略遜于分布式制導(dǎo)方式。
對于集中式協(xié)同制導(dǎo),趙世鈺等提出了把協(xié)調(diào)變量和時間約束的制導(dǎo)律相結(jié)合的協(xié)同制導(dǎo)方法,但該方法可能會出現(xiàn)超過載的情況。針對該問題,文獻[8]將文獻[7]的方法轉(zhuǎn)化為了系統(tǒng)的穩(wěn)定性問題進行求解。文獻[9]為了解決多枚導(dǎo)彈同時攻擊共同目標(biāo)時的尋的制導(dǎo)問題,引入了多導(dǎo)彈協(xié)同制導(dǎo)的新概念,提出了協(xié)同比例導(dǎo)航制導(dǎo)律,通過協(xié)同減小制導(dǎo)精度直至攔截,實現(xiàn)同時攻擊。
對于分布式協(xié)同制導(dǎo),文獻[10]將剩余時間信息作為輸出用來調(diào)整系統(tǒng)誤差,實現(xiàn)了有約束和無約束攻擊角度的情況下的協(xié)同打擊,但該方法的模型建立相對復(fù)雜。文獻[11]提出了一種新的分布式合作指導(dǎo)法(BPNG),確保了在固定或切換傳感/通信網(wǎng)絡(luò)下對沖擊時間的協(xié)同,拓撲需求限制較少。文獻[12]提出新的分布式制導(dǎo)方法,對測量噪聲造成的誤差、通信延遲等具有挑戰(zhàn)性的情況進行了修正。
上述方法均存在計算復(fù)雜、提取的信息量多等情況。且當(dāng)前對于制導(dǎo)律的研究多是集中在目標(biāo)位置已知的情況下來進行的,對于位置未知的地面目標(biāo),無法準(zhǔn)確判定其落點。飛行器對地面目標(biāo)進行探測時,隨著飛行器與目標(biāo)的距離不斷減小,定位的精度也會不斷提升。而對于飛行器協(xié)同探測系統(tǒng),為了實現(xiàn)精確定位與打擊的目的,對飛行器的落速方向也有著嚴(yán)格的要求。
基于這一考慮,本文利用協(xié)同探測定位算法與速度方向控制的制導(dǎo)律方法相結(jié)合,在實時探測定位的基礎(chǔ)上,將協(xié)同探測獲取的目標(biāo)位置估計信息同步傳輸至各飛行器中,對飛行器的制導(dǎo)律進行控制,形成探測與制導(dǎo)控制的一體化閉合回路。隨著目標(biāo)定位精度的提升,飛行器的飛行姿態(tài)和位置誤差逐漸減小。通過分析雷達和紅外飛行器導(dǎo)引頭協(xié)同定位的可行性,對協(xié)同探測與基于速度方向控制的不同探測類型飛行器制導(dǎo)律進行一體化設(shè)計。利用協(xié)同探測提升定位精度,同時通過無跡變換的方式對速度方向控制的制導(dǎo)律進行更精準(zhǔn)地計算。
1 算法分析
本文的算法流程圖如圖1所示,通過在協(xié)同探測濾波估計中獲得的新時刻目標(biāo)位置估計數(shù)據(jù),代入速度方向控制的制導(dǎo)方程,以此對動力學(xué)模型中的姿態(tài)角和飛行器位置坐標(biāo)進行計算,實時對飛行軌跡進行修正。該算法既能通過飛行器間通信的方式避免角速率提取的復(fù)雜計算,又能提升飛行器的姿態(tài)角和定位精度,減小飛行過載。為了方便計算與對比,飛行器在協(xié)同探測數(shù)據(jù)處理中的融合算法選用集中式融合算法。
圖1 協(xié)同探測與最優(yōu)制導(dǎo)律一體化方法流程圖
1.1 目標(biāo)位置估計
1.1.1 模型建立
以一個雷達、一個紅外導(dǎo)引頭為例,對于靜止目標(biāo)的位置進行估計。
(1)狀態(tài)方程
狀態(tài)矢量設(shè)為目標(biāo)在飛行器發(fā)射坐標(biāo)系中的位置、速度和加速度矢量

(1)
(2)觀測方程
觀測方程即為觀測矢量=()與狀態(tài)矢量的函數(shù)關(guān)系。假設(shè)飛行器在發(fā)射坐標(biāo)系中的位置矢量為
,M=(,M,M,M)
(2)
在視場坐標(biāo)系下,視線矢量可表示為
(3)
利用視場坐標(biāo)系中的視線矢量計算觀測矢量:
(4)
112 融合算法
以一個雷達、一個紅外導(dǎo)引頭為例,選用集中式融合的方法進行兩傳感器間的信息融合。雷達導(dǎo)引頭作為主濾波器,紅外導(dǎo)引頭作為副濾波器,集中式融合原理見式(5),飛行器間通信原理如圖2所示。紅外導(dǎo)引頭將時間、位置、速度和姿態(tài)角等信息傳送給主濾波器雷達導(dǎo)引頭進行融合濾波,之后再將估計的目標(biāo)位置、速度等信息傳送回紅外導(dǎo)引頭,實現(xiàn)數(shù)據(jù)共享。融合公式如下:

(5)
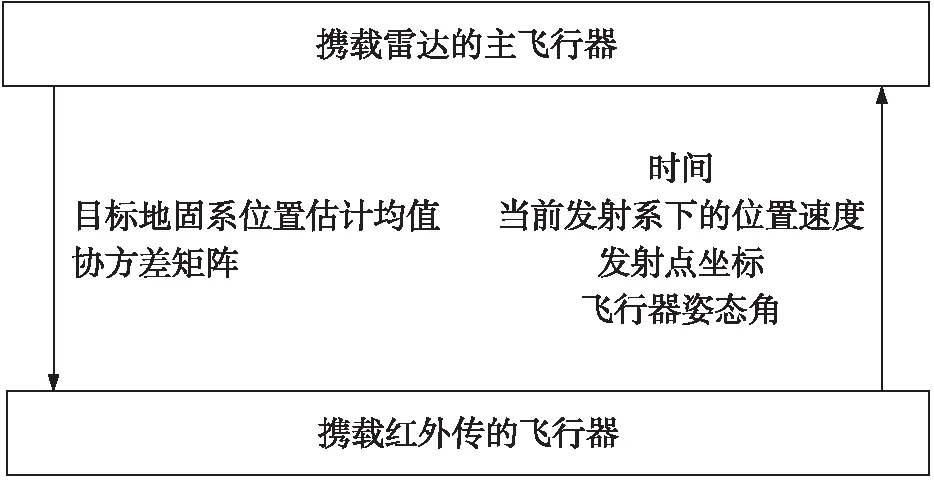
圖2 飛行器間通信原理
在建立了兩個飛行器觀測方程和目標(biāo)狀態(tài)方程的基礎(chǔ)上,便可以通過濾波算法和信息融合算法對飛行器間的數(shù)據(jù)進行處理,從而可得到地固系下目標(biāo)位置、速度和加速度的估計值+1。本文選擇無跡卡爾曼濾波(UKF)算法,具體步驟見文獻[14]。
113 過程噪聲方差自適應(yīng)設(shè)計
地面靜止目標(biāo)相對于飛行器可以看做是勻加速運動的模型。由文獻[15]可知,對于未知輸入的過程噪聲,其過程噪聲矩陣由位置和速度產(chǎn)生的噪聲量級在10,因此噪聲近似可看作完全由加速度產(chǎn)生,則模型離散化系統(tǒng)噪聲協(xié)方差陣為
=diag(0,0,0,0,0,0,,,)
(6)
式中:、、為對應(yīng)加速度分量的離散化白噪聲方差。為了便于過程噪聲方差的設(shè)計,利用一階Markov過程描述加速度。以分量為例,此時過程噪聲方差可以表示為

(7)

由于目標(biāo)為地面目標(biāo),其相對飛行器的加速度變化范圍較為固定,通常取值于某有限區(qū)間∈[0,],因此假設(shè)加速度在區(qū)間內(nèi)滿足均勻分布,則其方差為
(8)
可根據(jù)目標(biāo)型號性能特征確定,機動頻率取飛行時間的倒數(shù)。
一般情況下,對于地面目標(biāo),取固定值。但過程噪聲是用一階Markov過程來描述的,采用固定的數(shù)值進行描述難以降低過程噪聲帶來的誤差。因此可以通過實時更新的數(shù)值對過程噪聲進行自適應(yīng)。一步預(yù)測值與實際觀測值的差反應(yīng)了過程噪聲帶來的誤差影響,當(dāng)二者差值越大時,說明過程噪聲影響較大,的值越大;反之越小。因此,通過一步預(yù)測值和實際觀測值的差來確定的值可以有效降低過程噪聲帶來的誤差影響,提升濾波性能。具體方法如下:
由于目標(biāo)加速度變化較小,在采樣間隔足夠小時,時刻和+1時刻的加速度可描述為
+1=+Δ
(9)
對于勻加速運動,一步預(yù)測值可表示為
(10)
由于觀測數(shù)值已知,上式可近似描述為
(11)
一步預(yù)測值和觀測值的差可表示為

(12)
其均值為
(13)
方差可表示為
(14)
由此,可對過程噪聲進行實時更新。
114 初始化模塊設(shè)計
由于雷達傳感器能夠測得距離、俯仰角和方位角信息,因此,可以利用雷達導(dǎo)引頭在前兩個時刻的觀測信息進行初始化設(shè)計。
目標(biāo)的位置速度初始化可表示如下:
已知第一組雷達測量數(shù)據(jù)為(,,),相應(yīng)的標(biāo)準(zhǔn)差分別為,,。則測量數(shù)據(jù)的協(xié)方差矩陣為
(15)
將視場坐標(biāo)系(RS)的視線矢量轉(zhuǎn)換至地固系(ECF):
(16)
則目標(biāo)在地固系中的位置矢量為
(17)
根據(jù)測量數(shù)據(jù)到狀態(tài)矢量的函數(shù)方程,以及測量數(shù)據(jù)的均值和方差,便可以利用無跡變換進行誤差傳播分析。導(dǎo)引頭在初始過程中由于未加入末制導(dǎo),因此其位置、速度和姿態(tài)角等信息可以根據(jù)發(fā)射的初始信息來確定。
1.2 基于無跡變換的制導(dǎo)律設(shè)計
假設(shè)有個不同類的導(dǎo)引頭對目標(biāo)進行協(xié)同定位,他們之間通過信息融合技術(shù),得到目標(biāo)的估計位置,引入落速方向控制的導(dǎo)引律,解算得到制導(dǎo)參數(shù)。同時,為了消除濾波帶來的誤差,本文采用無跡變換的方式,通過輸入目標(biāo)的估計位置和協(xié)方差矩陣,輸出攻角、側(cè)滑角及其對應(yīng)的協(xié)方差矩陣,進一步提升攻角與側(cè)滑角的估計精度,減小過載。具體方法如下:
(1)首先構(gòu)造2+1個Sigma點及其權(quán)重,具體步驟見文獻[16],其中,Cholesky法分解的協(xié)方差矩陣為目標(biāo)位置估計的協(xié)方差矩陣。
(2)利用速度方向控制的方法計算每個點對應(yīng)的攻角與側(cè)滑角的狀態(tài)矢量:
()=(),=0,1,…,2
(18)
式中:(·)函數(shù)為速度方向控制制導(dǎo),具體表示方法如下。


(19)

建立制導(dǎo)坐標(biāo)系(TC,即以目標(biāo)時刻估計位置為原點的北天東坐標(biāo)系),則第個飛行器在TC系中的位置和速度的視線矢量坐標(biāo)分別可以表示為
(20)
(21)

TC系中的速度傾角為
(22)
TC系中的速度偏航角,視線高低角D,,視線方位角T,,視線矢量長度Los,分別可表為
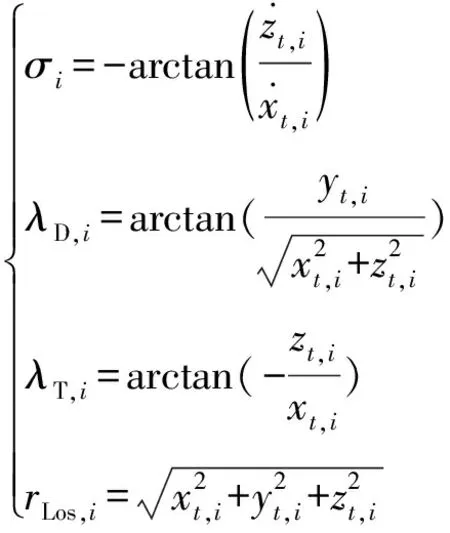
(23)
視線坐標(biāo)系中的速度矢量為
(24)



(25)
式中:=-4、=-2、=3為最優(yōu)導(dǎo)引系數(shù),為飛行器落角約束。
定義半速度系HVC,在半速度系中的引力加速度矢量為

(26)

半速度系軸和軸的氣動力加速度分量,,,分別為
(27)
根據(jù)氣動力加速度可以計算半速度系軸和軸的需要氣動力參數(shù)
(28)
攻角和側(cè)滑角即可由上述機動再入質(zhì)心動力學(xué)方程和導(dǎo)引方程確定。


(29)
式中:為權(quán)重值。
2 仿真分析
2.1 仿真參數(shù)設(shè)置
假設(shè)兩個飛行器,一個攜載雷達傳感器,為主飛行器,另一個攜載紅外傳感器,為從飛行器。設(shè)發(fā)射點的經(jīng)度108°E,緯度為39.3°N,高度為6 000 m。主飛行器在發(fā)射系下的坐標(biāo)為(0,0,4 000),從飛行器在發(fā)射系下的坐標(biāo)為(0,0,5 000)。兩個飛行器在3個方向的速度相同,分別為50.158 m/s,-0.048 7 m/s,0 m/s。雷達測量距離誤差為0.3 m,雷達和紅外測量的角度誤差均為0.2°。在1 s后對飛行器進行速度方向控制制導(dǎo),初始攻角20°,每個飛行器初始側(cè)滑角0°。比較本文方法(UT變換)與傳統(tǒng)的速度方向控制濾波制導(dǎo)方法(無UT變換)相關(guān)參數(shù)的變化趨勢。仿真軟件選用Matlab 2016a,處理器為 Intel(R)Core(TM)i5-8265U。
2.2 飛行器攻角和側(cè)滑角變化趨勢
對比兩種方法下攻角和側(cè)滑角的誤差,結(jié)果如圖3和圖4所示。
圖3 攻角誤差對比圖
圖4 側(cè)滑角對比圖
從仿真可以看出,相比于不使用無跡變換的制導(dǎo)方法,采用無跡變換的制導(dǎo)方式后,飛行器的攻角估計誤差減小77.5%,側(cè)滑角估計誤差減小73.9%。通過輸入位置的估計值,利用無跡變換的方法,輸出攻角和側(cè)滑角,實時調(diào)節(jié)在濾波過程中飛行器攻角和側(cè)滑角的誤差協(xié)方差,提升了制導(dǎo)的精度,攻角和側(cè)滑角的實際值與真值更為接近,誤差更小,飛行器的飛行姿態(tài)與理想條件下更為接近。
2.3 定位誤差精度
分別對兩種方法的定位精度進行分析,比較,,方向的均方根誤差,結(jié)果如圖5~圖7所示。
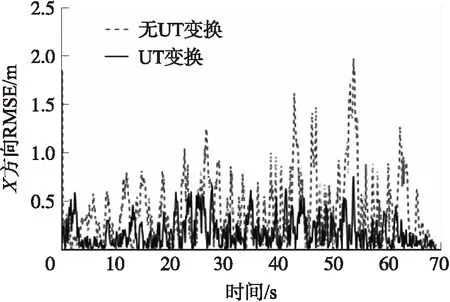
圖5 x方向位置均方根誤差對比
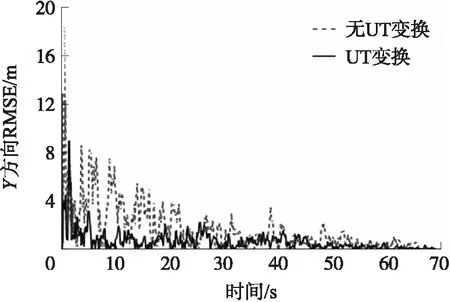
圖6 y方向位置均方根誤差對比
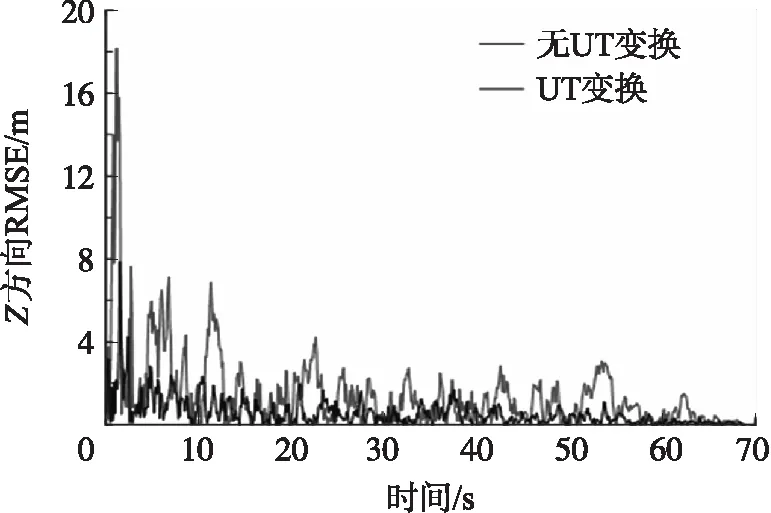
圖7 z方向位置均方根誤差對比
由仿真可以看出,相比于不使用無跡變換的制導(dǎo)方法,采用無跡變換的制導(dǎo)律方式后,方向定位誤差減小564,方向定位誤差減小596,方向定位誤差減小59.9%。從數(shù)據(jù)中可以看出,本文提出的使用了無跡變換的一體化設(shè)計方法,調(diào)整了飛行器的飛行姿態(tài),使飛行器與目標(biāo)之間的相對視線更加接近理想條件,可以有效地提升定位精度。
由于本文中假設(shè)的雷達與紅外傳感器探測精度誤差量級相對較小,所以定位誤差的結(jié)果相差的量級在10左右。但假如傳感器的測量誤差增大,定位誤差大小也會隨之增加,因此,本文的方法在實際應(yīng)用中,對于提升定位精度也能起到很好的效果。
2.4 飛行器過載情況
飛行器的過載可以反映飛行器在全程飛行過程中燃料消耗情況,過載越大,消耗越多。在提升定位精度、控制飛行器姿態(tài)的基礎(chǔ)上,如何盡量地減小過載也是十分必要的。對標(biāo)準(zhǔn)飛行軌跡、不使用無跡變換和使用無跡變換3種情況下的過載進行仿真分析,仿真結(jié)果如圖8和圖9所示。
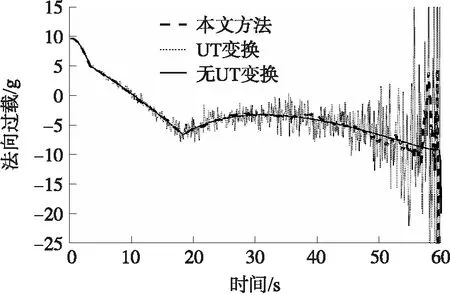
圖8 3種情況下法向過載

圖9 3種情況下橫向過載
由仿真結(jié)果可知,協(xié)同探測與制導(dǎo)律一體化的兩種方法的過載相比于標(biāo)準(zhǔn)飛行器的飛行軌跡略有不同。這是因為標(biāo)準(zhǔn)軌跡下目標(biāo)為已知量,而將協(xié)同探測與制導(dǎo)律相結(jié)合,目標(biāo)的位置是實時發(fā)生變化的,與目標(biāo)的真實位置存在偏差,因此飛行器在接近目標(biāo)的過程中,飛行姿態(tài)角度與真實目標(biāo)下飛行器的姿態(tài)角有所不同,導(dǎo)致過載不同。
對比使用無跡變換和不使用無跡變換計算的兩種方法,二者的過載差異并不明顯。計算全程飛行過程中的過載絕對值總和可知,標(biāo)準(zhǔn)彈道下飛行器法向過載絕對值總和為2 851.44,橫向的過載絕對值總和為1 456.3。當(dāng)使用無跡變換的方法時,飛行器法向過載絕對值總和為2 864.07,橫向的過載絕對值總和為1 469.52。不使用無跡變換時,法向過載絕對值總和為2 973.70,橫向的過載絕對值總和為1 537.943。可以看出,基于UT變換的協(xié)同探測與速度方向控制制導(dǎo)律方法無論是法向還是橫向,其過載絕對值的總和相比于不使用UT變換的協(xié)同探測與速度方向控制制導(dǎo)律方法更小。若按理想情況對飛行器制導(dǎo)律進行設(shè)計不能滿足飛行器的實際過載需求。因此,本文提出的方法在可以在較好地滿足需求的情況下,減小飛行器的過載,尤其是當(dāng)飛行器數(shù)量較多時協(xié)同探測時,能夠起到更好的效果。
3 結(jié)論
本文提出了基于無跡變換的協(xié)同探測與速度方向控制制導(dǎo)律一體化設(shè)計方法,在建立狀態(tài)方程和觀測方程的基礎(chǔ)上,首先,通過建立過程噪聲自適應(yīng)方法,利用一階Markoo過程建立過程噪聲模型,通過求解一步預(yù)測值與觀測值差的均值和加速度,確定當(dāng)前時刻的最大加速度,提升濾波性能。其次,提出了對本章的提出的一體化設(shè)計方法進行論述與驗證,將探測數(shù)據(jù)應(yīng)用于速度方向控制的制導(dǎo)律設(shè)計中,并通過無跡變換降低濾波過程中姿態(tài)角估計造成的誤差。該方法無論在提升觀測位置估計精度、降低飛行器姿態(tài)角誤差還是減小飛行器過載等方面,均能起到更好的效果,更貼近于實際的工程應(yīng)用。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56