ARJ21飛機尾渦在側風條件下的近地演化數值模擬
2022-07-04 02:25:04張鈞鐸左青海林孟達黃偉希潘衛軍崔桂香
航空學報 2022年5期
關鍵詞:飛機
張鈞鐸,左青海,林孟達,黃偉希,*,潘衛軍,崔桂香
1. 清華大學 航天航空學院,北京 100084
2. 中國民用航空飛行學院,廣漢 618307
ARJ21客機是中國自主研制擁有完全自主知識產權的中短程渦扇支線客機,采用了下單翼、T型平尾、前三點式起落架和尾吊式雙發動機布局。自2016年首次載客飛行以來,ARJ21客機保持了良好的安全飛行記錄,航班量、飛行時長、日利用率等指標逐年穩步增長,截至2020年11月10日,成都航空公司的ARJ21飛機已累計開通航線86條,累計飛行超過10 000 h,累計安全運送旅客超過131萬人次。盡管與一些成熟機型相比此機型仍處于發展完善過程中,但ARJ21與成熟機型的差距在不斷減小。
隨著中國航班數量的逐年增長,航空運輸業的壓力也隨之急劇增加,這使得很多機場容量趨于飽和,航班延誤情況也日益嚴重。機場容量受到機場起降能力的限制,因而成為了制約航空運輸發展的一道瓶頸。在機場的飛機起降過程中,前機的尾渦可對后機的起降造成較大的安全隱患。為此,在相同跑道上起降的飛機要保證一定的最小安全間隔(民用航空管理領域稱為尾流間隔),從而保障后機不處于前機尾渦的危險區域。因此,尾流間隔限制了單位時間內機場航班起降的數量,是制約機場容量的重要因素之一。另一方面,飛機尾渦的演化和消散規律與氣象條件有較大關系,而中國當前的尾流間隔標準是根據不利于尾流消散的氣象條件制定的,因而有一定的縮減空間。目前一些發達國家,例如美國、歐盟、日本等考慮了不同機型以及大氣環境的特點研發動態尾流間隔系統。中國相關研究工作起步較晚,尚沒有完善的動態系統。所以,研究中國自主研發型號的飛機尾渦在典型大氣環境條件下的演化規律與特征,建立安全高效的尾流間隔系統,對突破現有機場容量的瓶頸,緩解航空運輸壓力具有十分重要的意義。
飛機尾渦是一對旋轉方向相反的柱渦,其誘導流場也稱為飛機尾流。飛機在飛行過程中,渦面從機翼后緣脫落,經過近場演化階段(Near-field Phase)或卷起階段(Roll Up Phase),卷起而形成尾渦。由于尾渦對飛機起降安全至關重要,許多學者對尾渦演化展開研究。鮑鋒等在2015年對飛機尾渦系的不穩定性進行了實驗研究,發現引入小渦可以改變主渦的軌跡,進而促進主渦的衰減。邱思逸等在2019年應用體視粒子圖像測速(SPIV)技術,基于線性穩定性分析了尾渦的搖擺機制。Cheng等在2021年對雙叉小翼的翼尖渦進行了全局線性穩定性分析,發現上方渦的不穩定增長率高于下方渦。而當飛機尾渦與地面距離小于1.5時(為初始渦間距),尾渦的演化將受到地面的顯著影響,這一階段被稱為近地演化(In-Ground-Effect, IGE)。此階段往往為飛機進近的最后階段,一旦發生尾渦相遇事故,留給飛行員的反應時間很短。因此,研究飛機尾渦近地演化規律尤為重要。文獻[16]使用鏡像渦和二次渦模型描述了尾渦的近地軌跡,并給出了一種軌跡預測方法。由于地面的不可穿透性,尾渦在地面效應下的誘導速度場可以等效為地面以下的兩個鏡像渦。在鏡像渦的誘導下,兩個尾渦的渦心距離增大。此外,由于地面的無滑移條件,地面附近產生二次渦,并圍繞主渦運動,二次渦的誘導可使主渦發生反彈。
另一方面,地面附近的氣象條件也會對飛機尾渦的近地演化產生較大的影響,其中側風是對尾渦演化影響較大的氣象環境因素。Zheng和Ash在1996年使用二維層流數值模擬研究了尾渦軌跡在側風和溫度分層影響下的特性,指出地面效應產生的二次渦會誘導主渦在地面發生螺旋形的運動。Holz?pfel和Steen在2007年通過對觀測數據的統計分析,給出了一個尾渦近地衰減模型。此模型在Proctor模型的基礎上發展而來,并進一步引入側風的影響,發現尾渦在快速衰減階段的衰減速度與側風大小有關。Holz?pfel和Steen發現側風會導致兩個尾渦的不對稱衰減,下游渦的衰減速度快于上游渦。Proctor在2014年的大渦模擬研究中指出,這種不對稱性與側風的剪切有關。Lin等在2017年研究了側風強度以及大氣穩定度對飛機尾渦近地演化的影響,并發現側風越大尾渦壽命越短,而大氣穩定性的變化對上下游渦的影響具有不對稱性。因此,研究氣象條件對飛機尾渦近地演化的影響規律與作用機制,對建立飛機尾渦近地快速預測模型有重要的指導意義。
隨著ARJ21客機運行的逐漸成熟,針對ARJ21機型特點的尾渦研究則對實際應用更具現實意義。目前關于ARJ21尾渦演化特性的相關研究還較少,近期Zhang等研究了ARJ21的平尾以及襟翼在靜風條件下對尾渦演化的影響,發現在遠場演化階段,由于平尾渦消散較快,且襟翼渦與翼尖渦融合,平尾和襟翼對遠場尾渦的環量演化、高度變化及移動軌跡沒有顯著影響。因此,針對該機型在不同氣象條件下尾渦特性的研究對尾流間隔系統的建立及優化非常重要。并且隨著國際航班的開通,對ARJ21尾渦特點的研究也益于該機型更快與國際標準接軌。為了研究不同氣象條件下ARJ21飛機尾渦的演化特征,本文應用基于自適應網格的大渦模擬方法,研究了3種氣象條件下ARJ21尾渦的近地演化過程,并評估了其對后機安全性的影響。
1 飛機尾渦數值模擬方法
1.1 數學模型
飛機尾渦流場的最大速度通常小于30 m/s,屬于低速流動問題,故滿足不可壓縮Navie-Stokes (N-S)方程組。本文應用Boussinesq假設模擬溫差產生的浮力效應,即通過動量方程中的浮力項體現。因此,求解過濾后的N-S方程組(大渦模擬方程組)為
(1)

(2)
(3)

1.2 自適應網格方法
在飛機的隨體參考系中,尾渦流場的空間發展可長達數千米,而現有計算條件難以快速實現如此長軸向計算域的精確計算。因此,通常對地面坐標系下尾渦的時間發展問題進行模擬,即考察相對地面靜止且垂直于飛行路徑的截面內尾渦隨時間的演化。由于尾渦的長、短波不穩定性發生在三維條件下,因此三維大渦模擬(Large Eddy Simulation, LES)方法為尾渦數值研究的主要方法。Holz?pfel等采用軸向計算域長度為8.5的三維模擬,以分辨Crow長波不穩定性,然而Holz?pfel使用了較低的軸向分辨率以減少計算量,因此導致無法分辨短波失穩過程。為了同時分辨長短波不穩定性,Hennemann等在2011年的大渦模擬中采用較長軸向計算域的同時保證了較高的軸向分辨率,但計算代價較大,總網格量達到了6 000萬量級。隨著計算能力的進一步提高,Misaka等在2015年使用較長軸向計算域的同時保證了軸向的高分辨率,從而實現了同時分辨長短波不穩定性,但其網格總量達到了16 000萬量級。這樣大的計算量不利于尾渦演化問題的工程應用與推廣,并且動態尾流間隔系統的建立也需要更加高效的尾渦模擬方法。
為解決飛機尾渦準確模擬所需計算量較大的難點,利用渦心處流速梯度大、遠離渦心處流速梯度小的特點,采用Lin等開發的自適應網格大渦模擬數值方法ATTLES(Adaptive TTLES)。其中網格自適應模塊根據Gnoffo在1983年提出的彈簧比擬法改進而成。自適應網格算法假定網格節點間由彈簧相連,當地流速梯度越大,則彈簧剛度越強,網格間距就越小。當系統達到受力平衡時,即可獲得與流場變化相適應的網格。ATTLES使用有限體積法離散流動控制方程,采用動量插值的SIMPLE方法進行求解,利用四階龍格庫塔積分進行時間推進。此外,ATTLES計算程序通過分區并行方法實現大規模高性能數值計算。當前數值方法的具體過程在Lin等的研究論文中有詳細描述。
1.3 尾渦生成模型
現有研究大多采用渦模型(如BH渦模型)對飛機尾渦進行初始化,然而這種方法沒有考慮到尾渦卷起過程對尾渦演化的影響。Misaka等在2015年通過雷諾平均Navier-Stokes (RANS)模擬整機繞流模擬與尾渦遠場衰減LES耦合,實現了尾渦卷起階段與遠場衰減的結合,但該方法計算效率較低,計算成本較高。因此,本文采用Lin等提出的升力面模型對尾渦進行初始化。相比傳統渦模型法,本文模型可以在不增加計算量的前提下模擬尾渦的卷起過程,進而能夠反映卷起過程對尾渦演化及其遠場衰減的影響。升力面模型將飛機對空氣的作用簡化為平面分布的升力和阻力,故無需對整機繞流進行模擬,并且能在同一算例中完成模擬尾渦的卷起階段和遠場衰減。
圖1(a)顯示了升力面模型的原理,其中、、分別代表飛機的飛行方向(軸向)、翼展方向和垂直方向。在一個寬度為飛機翼展、厚度為、軸向無限長的矩形區域內,施加豎直向下、橢圓分布、作用時長為的體積力

(4)
式中:尾渦初始環量為

(5)
初始渦間距為

(6)
其中:為飛機質量;是重力加速度;是空氣密度;表示飛機飛行空速。這個體積力的物理意義是機翼升力的反作用力,和應盡可能小以接近真實情況,但為了兼顧數值計算的穩定性,本文取=0.014,=0.003。
圖1(b)顯示了采用升力面模型的尾渦模擬過程:在的作用下,計算域中形成了一個渦層;渦層在自誘導作用下卷起,并發展為一對尾渦;最終尾渦進入遠場衰減階段。
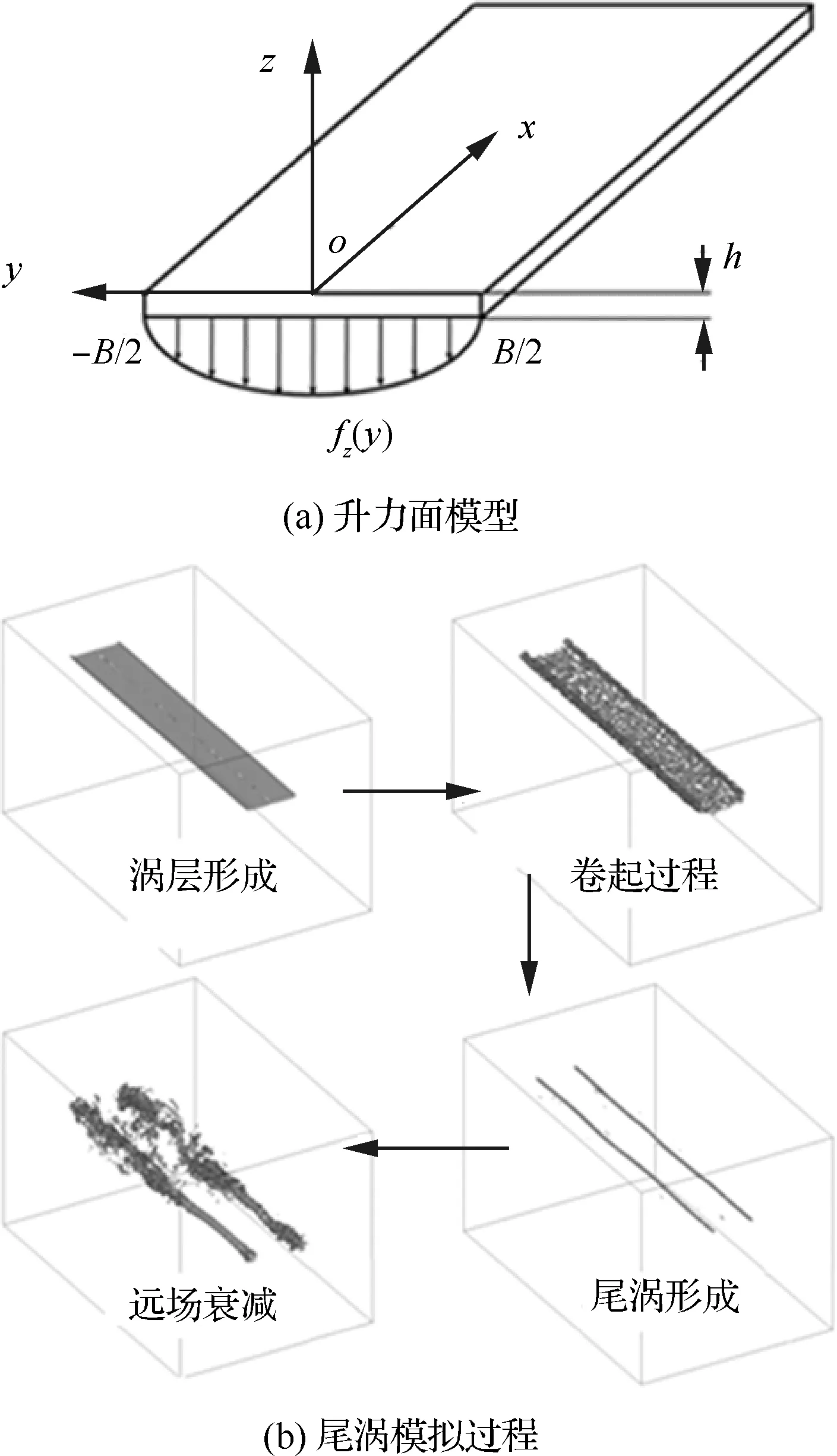
圖1 尾渦初始化模擬示意圖Fig.1 Sketch of wake vortex initial simulation
為了模擬飛行阻力的影響,在上述矩形區域中施加沿飛行方向的分布力:
(7)
式中:為飛機的升阻比,本文參考Lin等的研究,根據Keye的數值模擬結果取為12,以模擬客機的進場情況。盡管式(7)是根據誘導阻力建立的表達式,由于飛機在進場過程中飛行速度較低,誘導阻力遠大于摩擦阻力,占總阻力的比例較大,故本文以式(7)來近似計算阻力。
2 ARJ21飛機尾渦近地演化特征
2.1 算例設置
為研究氣象條件對ARJ21飛機進近過程尾渦近地演化的影響,在3種典型大氣條件下,對ARJ21飛機尾渦的近地演化進行模擬與分析。為了表現ARJ21飛機的機型特點,采用Zhang等所用的三翼面模型模擬尾渦生成,其中3個翼面分別對應主翼、襟翼和平尾,分別承擔總升力的60%、50%和-10%,主翼和平尾采用橢圓翼假設,襟翼采用矩形翼假設近似。對這3個翼面分別應用Lin等的升力面模型(如圖2左所示,黑色、藍色、紅色分別代表主翼、襟翼和尾翼),以針對ARJ21的機型特點,對ARJ21的尾渦近地演化過程進行模擬。
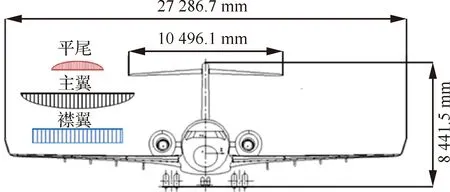
圖2 ARJ21升力面模型示意圖Fig.2 Sketch of lift-drag model of ARJ21
根據ARJ21的機型特點,考慮進近過程參數由式(5)、式(6)可得尾渦參數=212 m/s,=21.4 m,分別為尾渦初始環量和渦心初始間隔。根據與,可以定義尾渦演化的特征速度和特征時間:

(8)
式中:為根據畢奧薩伐爾定律計算所得尾渦在互誘導下的初始下降速度;是尾渦以速度下降距離所需的時間。
對于ARJ21機型,特征速度和特征時間分別為=1.58 m/s和=13.54 s。,以環量定義雷諾數為=/≈1.2×10,其中空氣的運動黏度系數取=1.8×10m/s。在本文的算例中,計算域取為××=8.0×6.3×6.3,尾渦軸向計算域取為8以分辨長波不穩定性。計算網格數為××=366×258×125。在尾渦軸向采用均勻間距Δ=0.022(1 m)的網格, 在垂直于尾渦軸線的平面內用自適應網格方法以滿足計算精度的要求,其中渦心附近分辨率為Δ=Δ=0.01,而遠離渦心區域分辨率為0.07。此算例網格總數為660萬左右,垂直于渦軸方向截面網格如圖3所示。計算域的翼展和飛行方向均采用周期邊界條件。計算域頂部提零梯度邊界條件,底部邊界給無滑移條件。計算中取固定時間步長Δ=/6 800。尾渦的初始高度(飛機飛行高度)位于,兩個尾渦中心(或假想的飛行路徑)距離左邊界2,背景大氣側風() 沿翼展方向。當前數值方法與網格參數已經過驗證,所得的模擬結果與觀測結果相符,詳見Lin等。
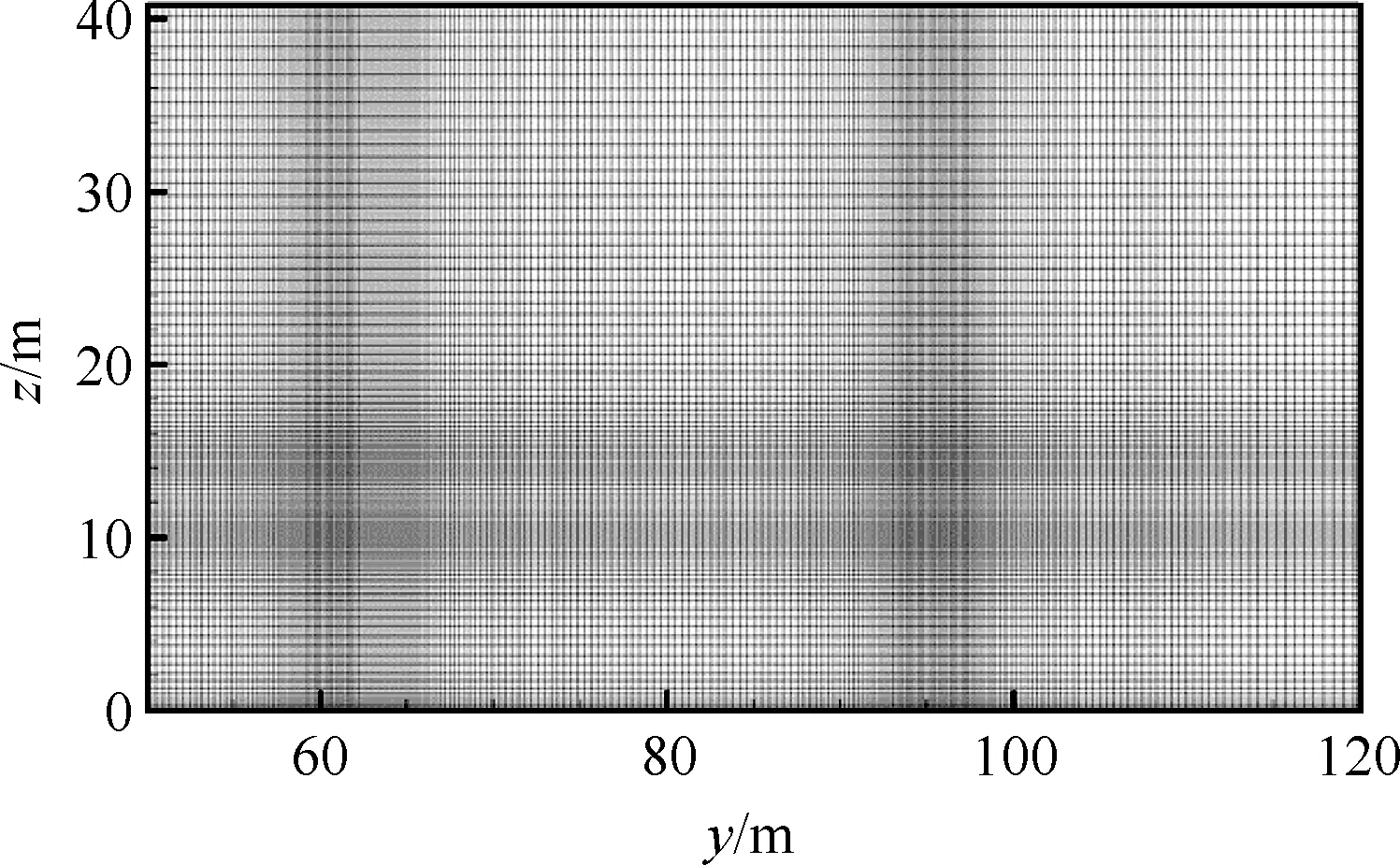
圖3 計算域垂直于渦軸截面的自適應網格Fig.3 Sectional view of adaptive mesh
近地大氣是大氣邊界層的最下層,厚度約為整個大氣邊界層的1/10量級。近地層中的氣象條件較為復雜,其中側風(風垂直于飛行方向或尾渦軸向的分量)對尾渦演化有較大影響。為此本文設計了3個算例(如表1所示),以研究側風條件下尾渦近地演化的特征與機制。

表1 算例背景大氣信息Table 1 Atmosphere condition of simulation cases

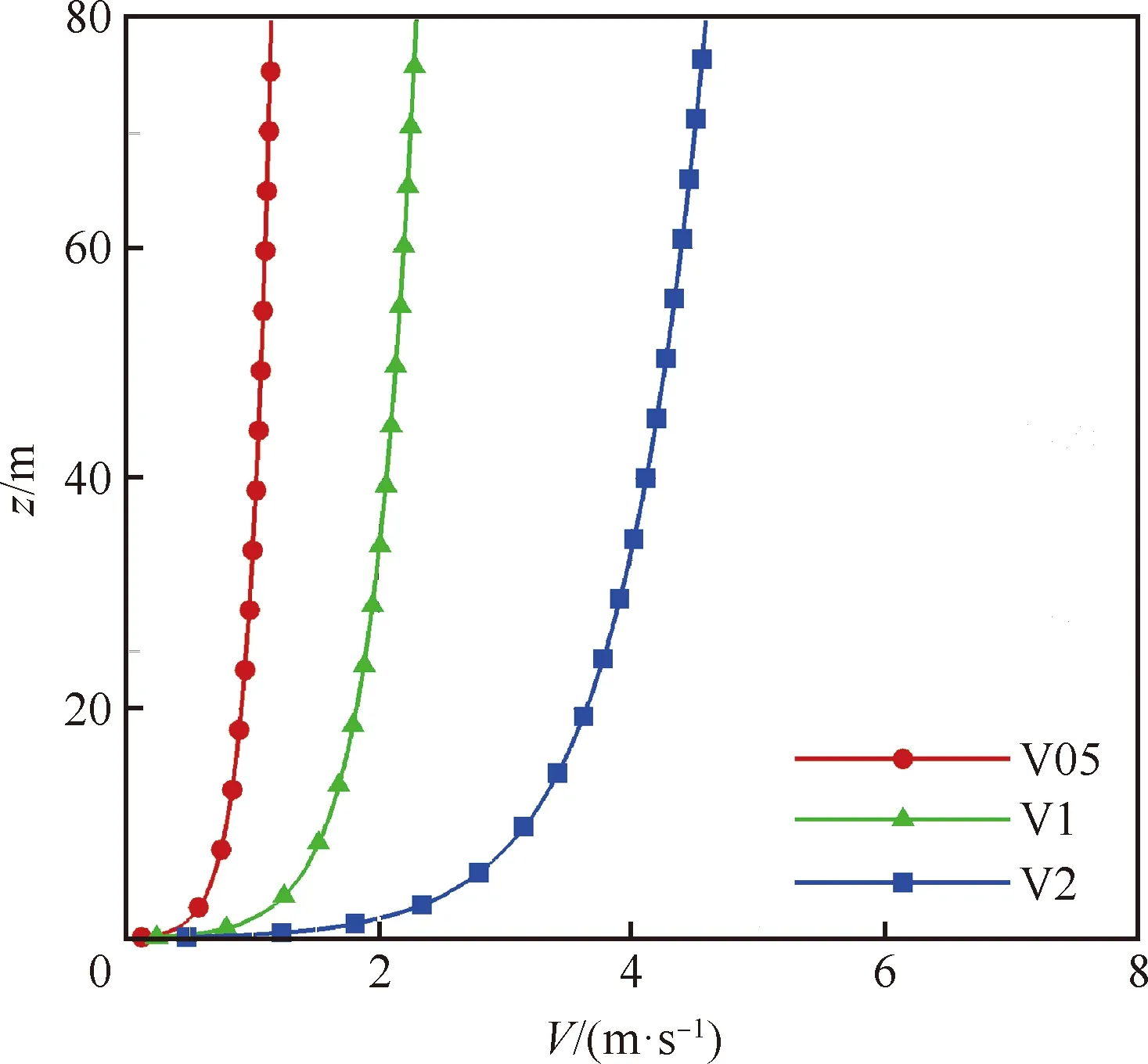
圖4 側風V沿高度z分布廓線Fig.4 Profile of crosswind V along vertical direction z
(9)
式中:為地面粗糙度,本文算例根據機場周圍的陸面特征取為0.1 m;湍流耗散率和湍動能為尾渦初始高度處的值,采用NASA開發的AVOSS系統中的湍流耗散率及湍動能關系式確定:
(10)
其中:表示邊界層厚度,可由Arya提出的方法估算:

(11)

為了生成初始化背景湍流場,本文采用Rogallo提出的方法,首先在譜空間生成速度場:

(12)
式中:為波數向量,,,為其3個分量;、按式(13)取值以滿足目標能譜:

(13)
其中:、為[0, 2π]內均勻分布的隨機數;()為目標能譜,本文用Bechara改進的馮卡門譜:

(14)
其中:為能譜峰值波數,本文算例取為2π/50 m以模擬中性大氣條件下的近地湍流;=(/)是Kolmogorov波數。確定目標湍流耗散率后,可根據式(14)和式(15)確定:
(15)


(16)
其中:為物理空間坐標向量。
2.2 算例結果分析

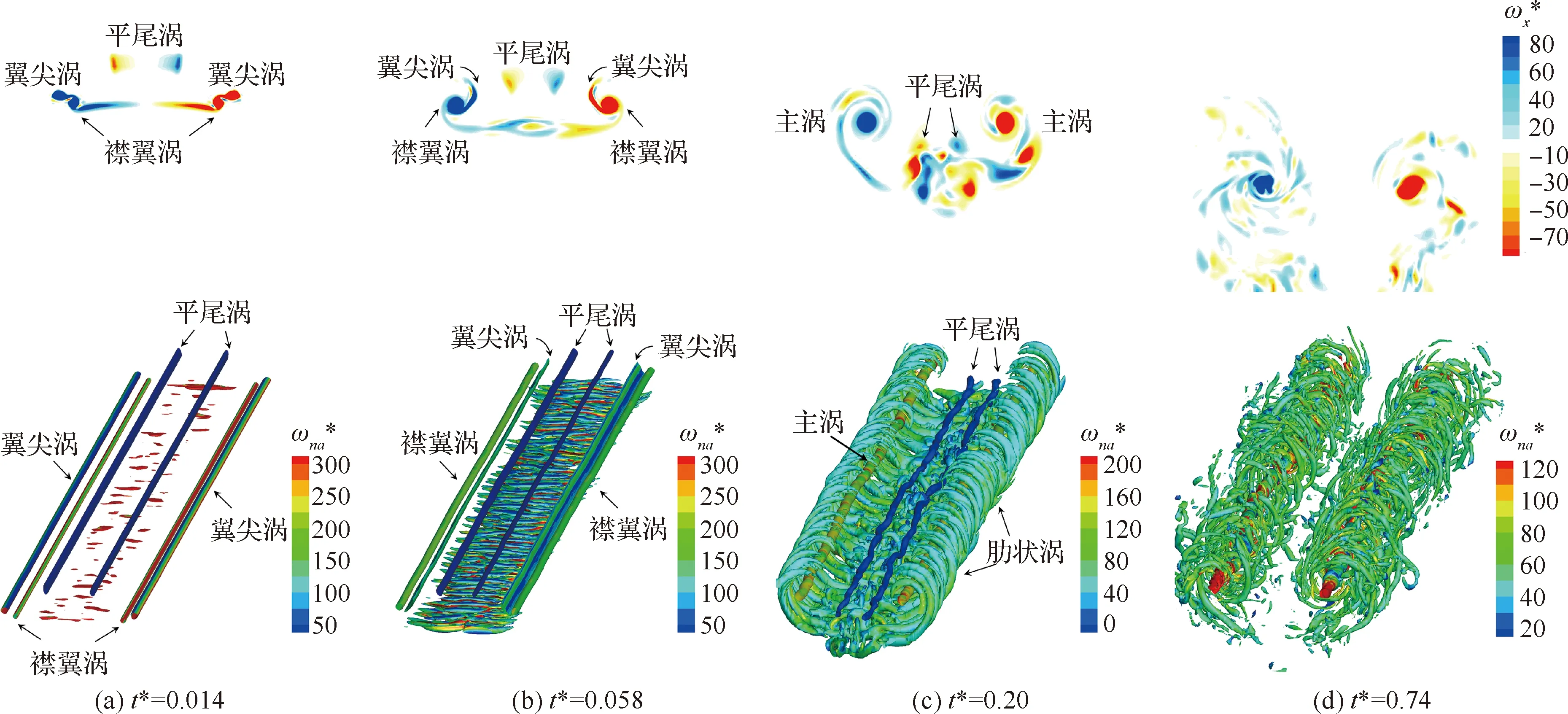
圖5 V1算例中ARJ21尾渦卷起過程Fig.5 Roll up phase of ARJ21 wake vortices in V1 case
在卷起階段結束之后,尾渦在大氣中演化并最終衰減,這一階段為遠場演化階段(Far-field Phase)。在遠場演化階段,地面以及近地氣象條件對尾渦的演化與衰減具有較為顯著的影響。圖6通過不同時刻的軸向渦量分布展示了在側風作用下尾渦遠場演化的過程。從圖中可以清晰地看出卷起后的尾渦在相互誘導作用下不斷向下運動,同時在側風的作用下尾渦發生了顯著的平移。在地面效應的作用下,尾渦的間距逐漸增大。這是由于地面具有不可穿透性,因而尾渦在地面附近誘導的速度場可以等效為在地面以下的一對鏡像渦。在鏡像渦的誘導下,兩個尾渦的渦心距離不斷增大。此外,由于地面處的無滑移條件,尾渦在地面附近產生二次渦并圍繞主渦運動,二次渦的誘導促進了主渦的反彈與失穩。另一方面,在側風的作用下上游渦(左側)與下游渦(右側)的演化過程表現出較大的差異。從圖6可以明顯發現下游渦(右側)更早發生反彈,并且失穩與衰減較快;而上游渦(左側)更穩定且衰減很緩慢。由于側風隨高度的分布特點(圖4),側風也具有一定的剪切,而側風的剪切方向與上游渦相同,與下游渦相反。因此,側風增強了上游渦的穩定性,同時也促進了下游渦的失穩與衰減。
為了定量分析側風對尾渦演化與衰減的影響,將V05、V1、V2這3個算例中尾渦的演化與衰減特性進行對比。圖7顯示了3種側風條件下左右尾渦環量隨時間的演化。在所有算例中都可以觀測到環量進入快速衰減階段(Rapid Decay Phase)。快速衰減階段與擴散階段(Diffusion Phase)是飛機尾渦在遠場衰減的兩個階段,其中擴散階段環量衰減主要依靠渦量的徑向擴散,速度較慢;而進入快速衰減階段后,環量衰減速度突然加快。為了解釋尾渦快速衰減階段的發生機理,Crow在1970年采用運動學方法分析了一對柱渦在互誘導作用下的最優失穩模態,并指出尾渦演化經歷一個波長為8.6的對稱正弦失穩過程。其結果表明,此失穩過程的發展速度與尾渦的間距是負相關的,因為此失穩過程主要由尾渦的互誘導產生。此外,Holz?pfel等在三維大渦模擬研究中觀察到了短波失穩,并發現短波不穩定性的發展將產生許多環繞主渦的肋狀(Rib-like)二次渦結構,在本文中也觀察到了肋狀渦結構,如圖5(c)中所標出。Misaka等的大渦模擬研究指出,在這些二次渦的誘導下,主渦渦核結構發生破壞,進而導致快速衰減發生。因此,Crow不穩定性被證實與尾渦的快速衰減相關。與高空演化不同,近地尾渦在快速衰減之后會重新進入一個衰減相對緩慢的階段。進一步,Stephan等對尾渦近地演化的研究表明兩個尾渦的間距在地面效應下增大,尾渦之間相互作用的減小阻止了Crow不穩定性的發展,導致孤立渦具有較長的壽命。這種長時間存在的孤立渦大大增加了后機遭遇尾流的風險。這一現象在V05算例中可明顯觀察到。此時,在地面作用下兩個尾渦中心的距離變大,因此基于尾渦互誘導的Crow不穩定性減弱,抑制了尾渦的快速衰減;此外,由于尾渦與地面反彈后距離逐漸增大,地面效應減弱。地面效應產生的二次渦對尾渦的誘導作用也隨之減弱,所以尾渦的衰減速度將減慢。在這一階段中,尾渦的演化類似于單個渦在自由大氣中的情況,可稱為孤立渦階段。另一方面,由圖7與Zhang等靜風條件下ARJ21尾渦演化結果對比可以明顯看出側風促進了尾渦的衰減,并且側風越大尾渦衰減越快。已有研究表明,在近地演化中尾渦壽命對湍流耗散率的敏感度較大,衰減速率隨湍流耗散率的增大而增大。而背景大氣的湍流耗散率隨側風增強(表1),因此尾渦衰減速率也隨側風增大而加快。此外,在3個算例中兩個尾渦的環量隨時間演化均表現出不對稱性,其中下游渦(右側渦,圖7中由虛線表示)在側風的作用下環量衰減速度加快;而對于上游渦(左側渦,圖7中由實線表示)趨勢與下游渦相反,環量的衰減速度隨穩定度增加而減慢。這是因為側風平均剪切影響了尾渦的演化,側風的剪切方向與上游渦相同,因而加強了上游渦的穩定性;而側風剪切方向與下游渦相反,因此下游渦更容易發生失穩,所以衰減更快。這與圖6中通過渦量分布所顯示的尾渦演化特點相符。
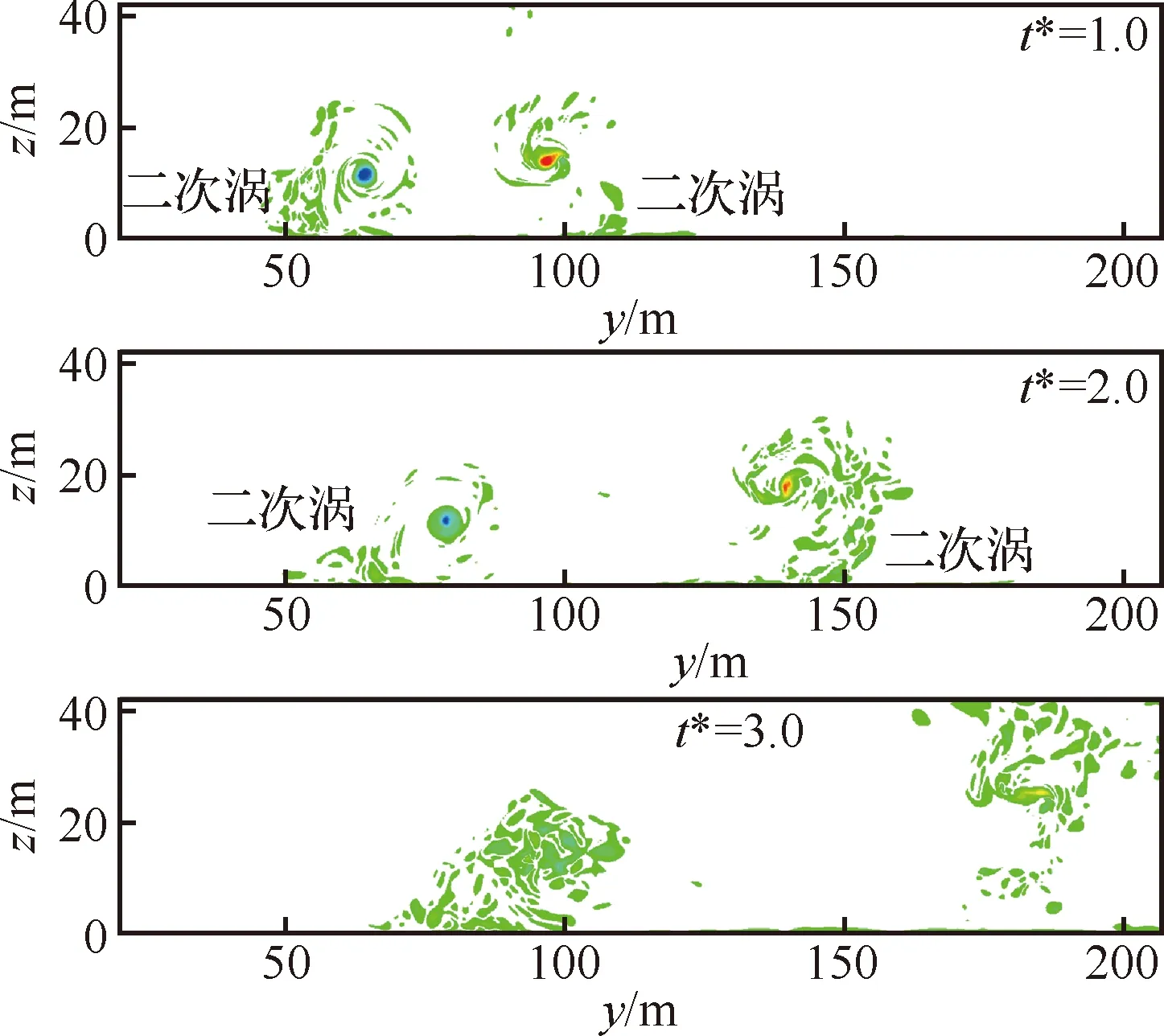
圖6 V1算例軸向渦量分布Fig.6 Axial vorticity distribution in V1 case
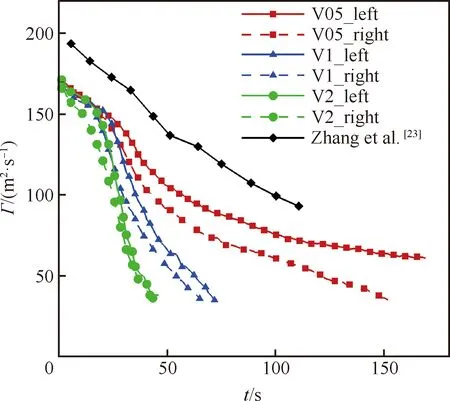
圖7 各算例左右尾渦環量隨時間的演化及Zhang 等[23]靜風條件結果對比Fig.7 Temporal evolution of left and right wake vortex circulations and comparison with results from Zhang et al. [23] under static wind condition
圖8為3種側風條件下尾渦渦心高度隨時間的變化關系。可以看出尾渦在相互誘導下先下降,后因為地面效應開始反彈。并且,在側風的影響下,3個算例中下游渦的反彈情況均更為顯著,這與圖6中顯示的尾渦演化特點一致。此外,結合圖7可以發現,尾渦環量開始快速衰減(即環量拐點)的時間為+0.25,其中為尾渦達到最低點的時間,這一結果與Proctor的觀測相符。
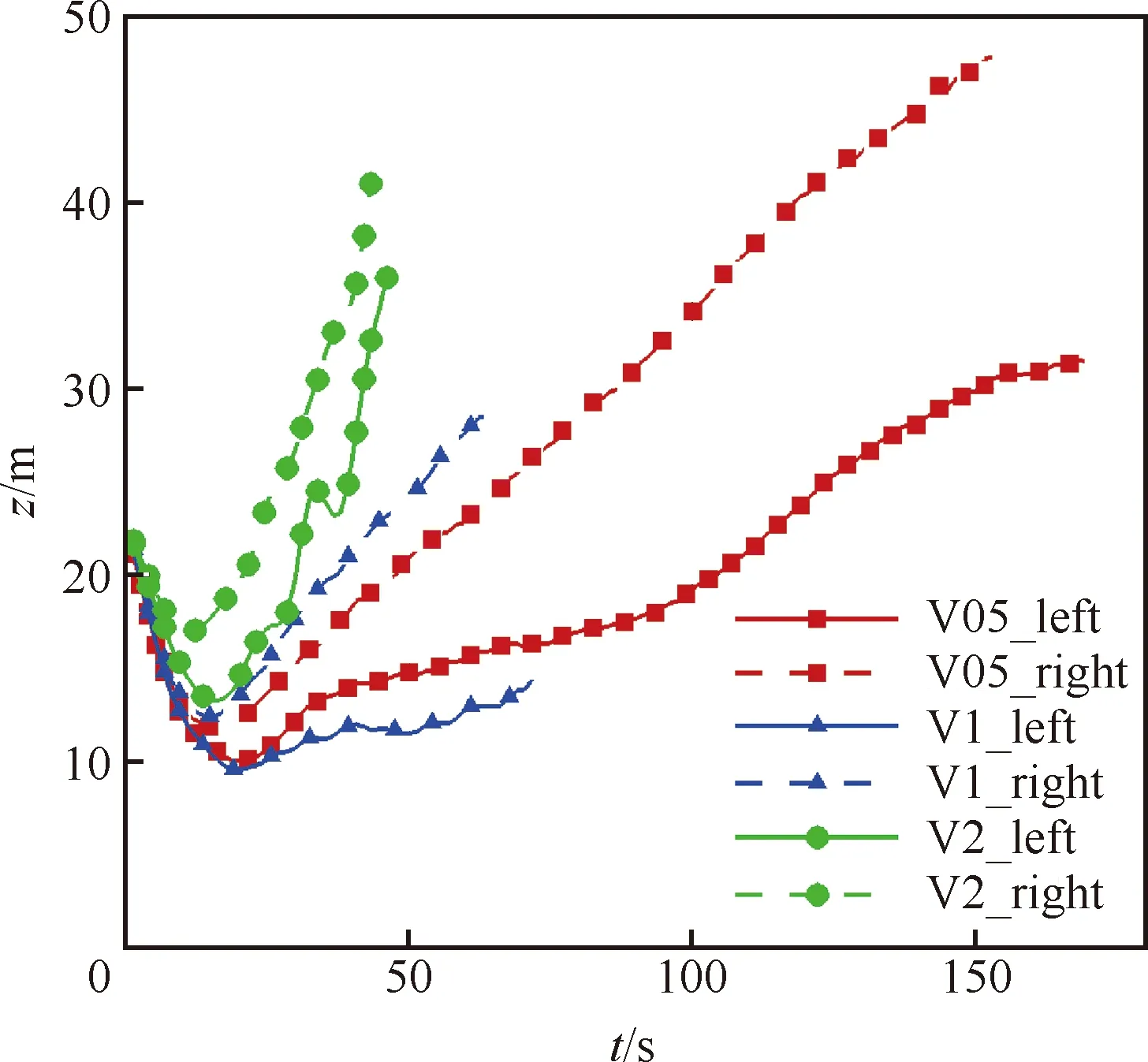
圖8 尾渦渦心高度隨時間的演化Fig.8 Temporal evolution of altitude of wake vortex core
圖9顯示了各算例尾渦渦心移動軌跡(其中環量小于40 m/s的部分已經截去)。從圖中可以看出,尾渦的水平移動距離與側風大小呈正相關,并且下游渦的移動距離更遠。這是由于在地面效應下,鏡像渦的誘導速度使兩個渦互相排斥,所以上游渦的平移速度略小于側風速度,而下游渦的平移速度略大于側風速度。尾渦的壽命與水平移動距離對飛機起降安全較為重要。因此結合圖8與圖9可以發現V05算例中的上游渦長時間停留在跑道上方,對本跑道的后續航班最危險。而V2算例下游渦平移距離最遠,達到了170 m,對相鄰跑道有一定的威脅。
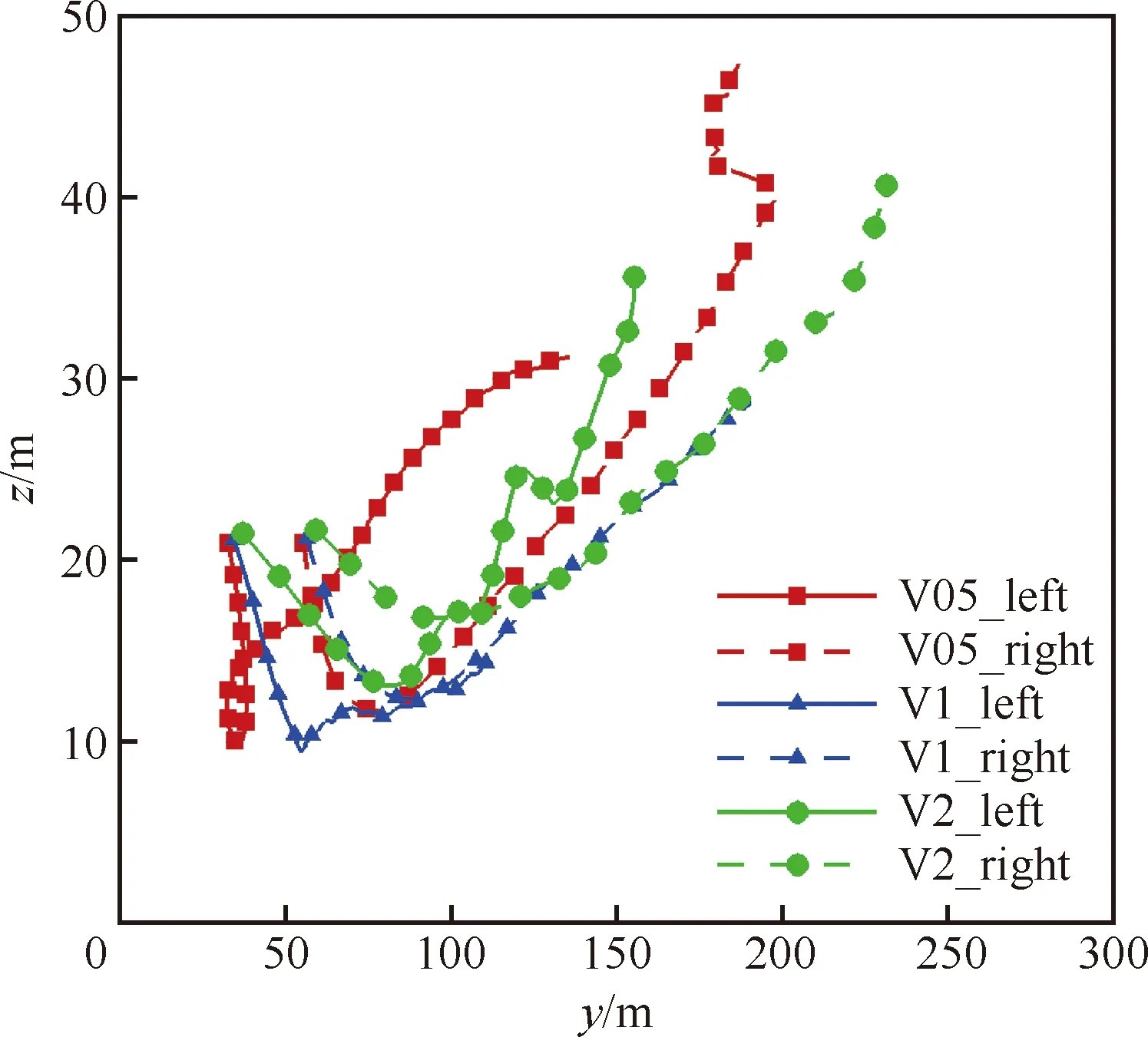
圖9 尾渦渦心移動軌跡Fig.9 Trajectory of wake vortex cores
2.3 ARJ21飛機對后機安全影響
后機安全與前機尾渦衰減情況密切相關,在2.2節得到ARJ21尾渦衰減規律后,本節對后機安全性進行討論。為了分析ARJ21飛機尾渦對后機的影響,采用林孟達對后機遭遇前機尾渦時的安全性分析模型。后機飛入前機尾流場后,會受到尾渦誘導下洗速度場的影響,包括尾流誘導的升力改變和滾轉力矩,而誘導滾轉力矩對飛行安全的威脅最大。因此,通常采用尾渦誘導的滾轉力矩系數(簡稱為滾轉力矩系數,用表示)作為后機的安全判據,即前機尾渦衰減使其所誘導的滾轉力矩系數降低到后機可承受的范圍內方為安全。圖10為滾轉力矩系數計算過程示意圖。
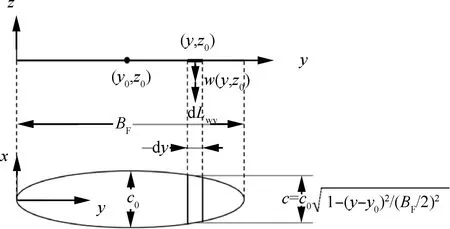
圖10 尾流誘導滾轉力矩系數計算示意圖Fig.10 Sketch of calculation of wake vortex-induced rolling moment coefficients
將后機簡化為橢圓分布力的平板機翼,其中為后機翼展;后機穿過尾渦預測面的位置坐標為(,)。假設升力線斜率為2π,則下洗速度場在機翼微元上產生的攻角變化量d及誘導升力變化量d為
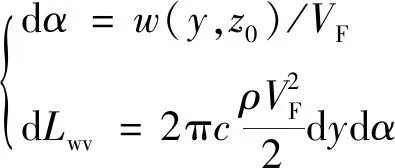
(17)
式中:(,) 為尾渦預測面內某時刻的下洗速度場;表示后機的進場空速。后機受到的誘導滾轉力矩為

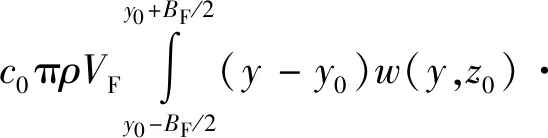

(18)
滾轉力矩系數為


(19)
其中:為翼面面積。由式(19)可知后機的滾轉力矩系數與其通過預測面的位置(,)有關,式(19) 中積分號內被積函數與后機翼展相關,其中′=-。如果根據式(19)計算,數據庫需要存儲每一時刻的下洗速度場(,),并在每次預測時,根據不同的后機做積分運算。為了適應快速預測的要求,本文做了如下簡化:

(20)
式中:(,)為在(,)處半徑=∞時的無窮遠環量,可以得到



(21)
式(21)表明:尾渦誘導速度場對應的環量越大,后機受到的滾轉力矩系數就越大。當(,)與渦心重合時(,)最大,所以當后機正好穿過尾渦中心時,受到的滾轉力矩最強。而后機的進場速度越大,翼展越大,則受到的滾轉力矩系數越小。
對于常見客機,最大可承受的滾轉力矩系數為0.05~0.07,為保證安全,本文取為0.05。由此根據式(21)可求得幾種常見機型所能承受的最大尾渦強度,如表2所示。
表2選取波音B747-400、波音B737-800和塞斯納C650分別作為重型、中型、輕型機的代表,計算了它們在進近階段能夠承受的最大尾渦環量。再根據2.2節中不同側風條件下ARJ21尾渦環量隨時間演化關系,進而得到不同后機對應的最小安全時間間隔。
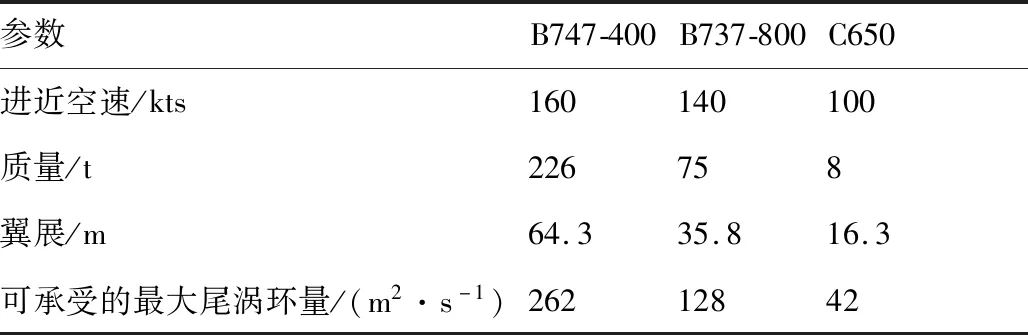
表2 機型參數Table 2 Parameters of different aircraft types
由此可以看出B747能承受的環量為262 m/s,已經大于ARJ21的初始環量,因此B747在ARJ21后方進近時不需要考慮尾渦的影響。B737-800為典型中型機,是世界上目前使用最廣泛的民航客機,對其安全分析結果具有重要意義。B737-800能承受的環量為128 m/s,V05、V1、V2這3個算例中ARJ21尾渦衰減到128 m/s的時間分別為36 s,28 s,24 s。最危險的算例為側風最小的算例V05,可見在風速大于0.79 m/s情況下,B737在ARJ21后方進近時,時間間隔大于50 s即可不受ARJ21尾渦的威脅。對于輕型機C650所能承受的環量為42 m/s,V05、V1、V2這3個算例中尾渦衰減到42 m/s的時間分別為224 s、68 s、42 s。最危險的算例也是V05,間隔要大于300 s才可以不受ARJ21尾渦的威脅。由此可見,在側風較小的情況下(如V05算例),ARJ21的尾渦對于輕型客機威脅相對較大。
3 結 論
本文應用升力面模型和自適應網格大渦模擬方法,模擬了國產ARJ21飛機尾渦在3種側風條件下的演化與衰減過程,并對尾渦流場結構特點進行了分析。
1) 在ARJ21飛機尾渦的近場演化階段,主翼、襟翼和平尾分別產生一對渦系(翼尖渦、襟翼渦和平尾渦)。其中,平尾渦與翼尖渦、襟翼渦的方向相反,且強度最弱并較快消散;而襟翼渦最強并誘導翼尖渦與之融合。
2) 在遠場演化階段,上游渦與下游渦的演化具有不對稱性:側風增強了上游渦的穩定性,同時也促進了下游渦的失穩與衰減,但下游渦的移動距離更遠,此外側風越強尾渦衰減越快。
3) 根據ARJ21尾渦在側風條件下的演化特點,分析了不同機型跟隨ARJ21進近時的安全性,發現重型機可不考慮其尾渦影響,而對于中型機與輕型機,在側風大于0.79 m/s的情況下,時間間隔分別大于50 s與300 s可不受ARJ21尾渦的威脅。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
