跑道侵入與沖突檢測的共形幾何代數描述
2022-07-04 02:28:34焦衛東王瑞冬姚軍強龐艷麗
航空學報 2022年5期
焦衛東,王瑞冬,姚軍強,龐艷麗
中國民航大學 天津市智能信號與圖像處理重點實驗室,天津 300300
隨著中國經濟快速發展,民航飛行器數量越來越多,機場日漸繁忙,跑道侵入、沖突導致的危險事件發生的可能性增大,嚴重影響機場場面的安全運行。跑道侵入與沖突檢測成為空中交通管理的重要環節。
目前,跑道侵入與沖突檢測算法均基于歐氏空間研究。沈笑云等利用廣播式自動相關監視(Automatic Dependent Surveillance-Broadcast, ADS-B)提供的實時位置數據和地理信息系統(Geographic Information System, GIS),采用射線法及計算歐氏距離判斷的方式實現了實時跑道沖突檢測與告警功能。該方法在用射線法判斷飛行器和跑道保護區(Runway Protection Zone,RPZ)的位置關系時,需通過求解線性方程組確定射線和多面體的交點個數,且需要考慮邊界、邊界頂點及邊界延長面等特殊情況,邏輯復雜;在沖突檢測時需要分別判斷水平和垂直方向的距離,向高維擴展較困難,基于復雜場景的算法結構較復雜。Cai等提出一種基于深度學習的跑道侵入檢測方法,具有更好的可靠性和準確性。但該算法需要通過監控獲取大量視頻圖像,經大量學習和訓練獲得可靠的網絡及參數,工作量較大,且由于視頻視角原因,很難檢測遮蔽情況下的目標。Li等基于地面運動制導控制系統檢測跑道侵入,通過及早發現和警告跑道侵入來提高跑道安全性。該方法將保護區分成進場區、排隊區、跑道區和離去區,需要將航跡點和各個區進行比較,檢測沖突場景眾多。Wang等使用基于圖形處理器的高效算法檢測潛在的航路沖突,但由于航跡影響因素的不確定性,需要同時處理大量航跡,不適合用于跑道沖突檢測。王獻鋒等針對航路與終端區的防撞安全問題,提出一種基于蒙特卡羅法的飛行沖突檢測方法,能夠得到較為準確的總體飛行沖突概率。Miao等提出一種基于多級網格時空索引的新型低空軌跡沖突檢測算法,提高了軌跡規劃和空域利用率。Yang等提出一種基于計算幾何的概率沖突檢測快速算法,取得了不錯的準確率和效率。文獻[6-8]中的方法都是基于計算沖突概率的方法,在具有大量航跡數據的情況下,準確率會有一定保證。但對于發生跑道侵入后的沖突檢測,屬于實時檢測的情況,不會有足夠數據用于沖突概率計算和比較,不利于已經發生跑道侵入后的實時沖突檢測。

考慮到ADS-B已經成為民航飛機的標配,能夠提供實時位置及速度等數據,本文利用ADS-B數據,基于共形幾何代數優越的幾何計算能力和統一維度的表達能力,對實時跑道侵入與沖突檢測進行研究。首先,利用共形幾何代數進行RPZ的模型描述,通過共形幾何的外積運算判斷飛行器與RPZ各面之間的位置關系,進而判斷是否形成跑道侵入。然后,基于共形幾何代數的球面表示方法建立飛行器安全保護區的模型描述,通過共形幾何的內積運算判斷飛行器的安全保護區是否相交,從而判斷飛行器是否沖突。
1 共形幾何代數
1.1 基本定義
共形幾何代數是建立在歐氏幾何模型之上的幾何代數,它將三維歐氏空間擴展成五維共形空間,其一組正交矢量基為、、、、,滿足

(1)
式中:,=1,2,…,。
引入矢量
(2)
=+
(3)
分別表示坐標原點和無窮點,則

(4)
從而五維共形空間的基變為、、、、,定義單位偽標量為=。
1.2 基本運算
共形幾何代數的核心運算包括內積、外積與幾何積,即
(5)
式中:和為矢量;為和的夾角;表示運算空間。
內積是一種降維操作,其結果多用來表示距離與角度的運算。外積是將一個向量延伸到另一個向量的運算,是一種升維操作,其結果為二維子空間,也稱為二重向量(Bivector)。幾何積同時包含內積和外積,類似于復數中的實部與虛部,符號“+”僅對不同維度的幾何對象進行連接,并不進行任何其他操作。
在共形幾何代數中,幾何實體有2種表示形式,如表1所示。其中,在表示法1中:=++為五維歐氏空間的點;球的表示中:為該球球心;為該球半徑;平面的表示中:為該面法向量,為坐標原點到該面的距離;圓和點對的表示法中等變量為球;線的表示法中等變量為平面。表示法2中:“*”表示對偶運算符;、、、分別為歐氏空間中的點對應的表示法1中的共形幾何代數形式。通常情況下用表示法1可以解決共形幾何代數中的問題,而當只知道歐氏空間幾個點時,可以用表示法2快速表示共形幾何代數中幾何圖元的描述問題。
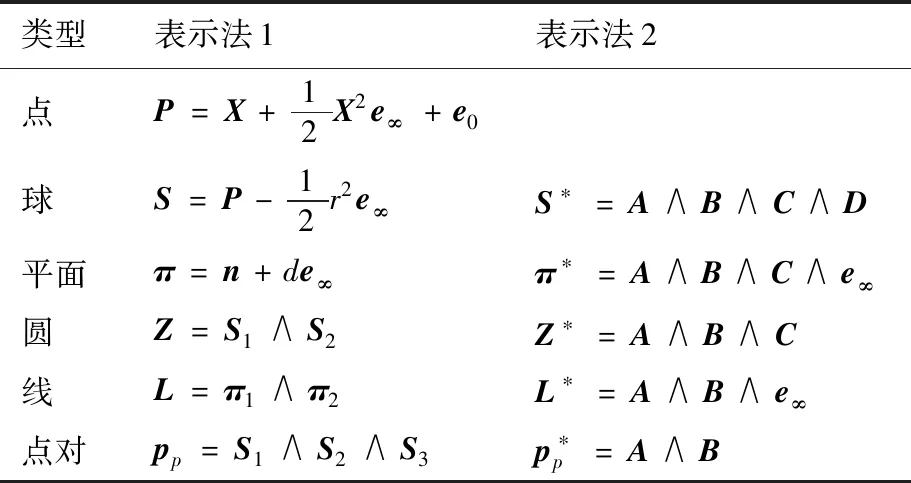
表1 共形幾何圖元列表Table 1 List of conformal geometric primitives
2 方法介紹
2.1 跑道保護區
國際民航組織(International Civil Aviation Organization,ICAO)對跑道侵入的定義:在機場中任何飛行器、車輛或人員誤入指定用于飛行器著陸和起飛的地面保護區。RPZ由《防止機場地面車輛和人員跑道侵入管理規定》定義,由地面保護區和空中保護區組成,如圖1所示。其中,地面保護區由機場跑道、滑行道、升降帶、跑道端安全區和電磁敏感區確定;空中保護區是從跑道升降帶起始端兩側開始,以3°角向上擴張,15°角向兩側擴張,直至達到距離跑道入口4 km處。這些線面圍成的區域及其地面部分共同組成RPZ。
以天津濱海國際機場為例,其經緯度分別為E117°20.7′和N39°07.4′,16R/34L跑道長3 600 m,寬60 m。以跑道中心點為原點、平行跑道的方向為軸、垂直跑道的方向為軸,建立直角坐標系,則RPZ的8個頂點坐標如表2所示。
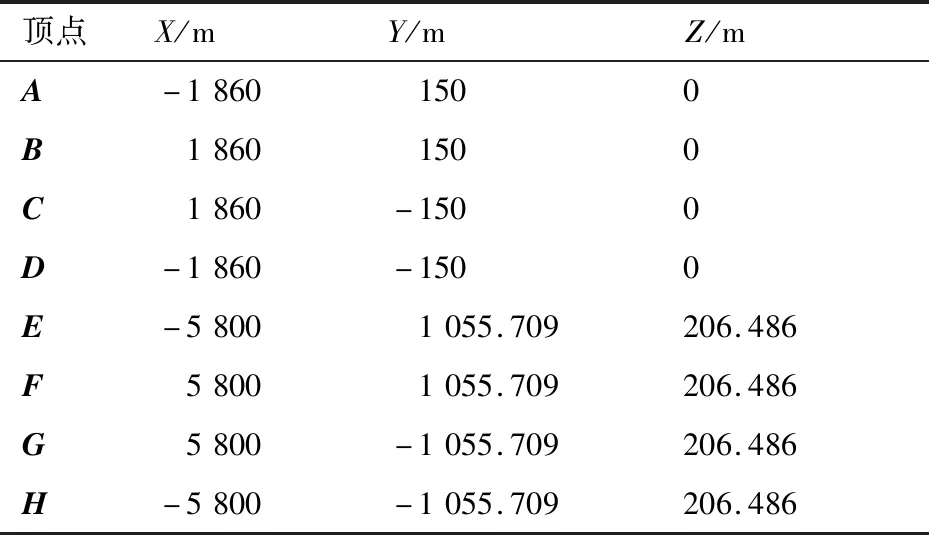
表2 RPZ的8個頂點坐標Table 2 8 vertex coordinates of RPZ
根據表1中點的表示法1和面的表示法2,共形幾何代數中的平面可以由該面上3點和表示,如由點,,得到RPZ的一個面(如圖1 所示)的共形幾何代數表示為
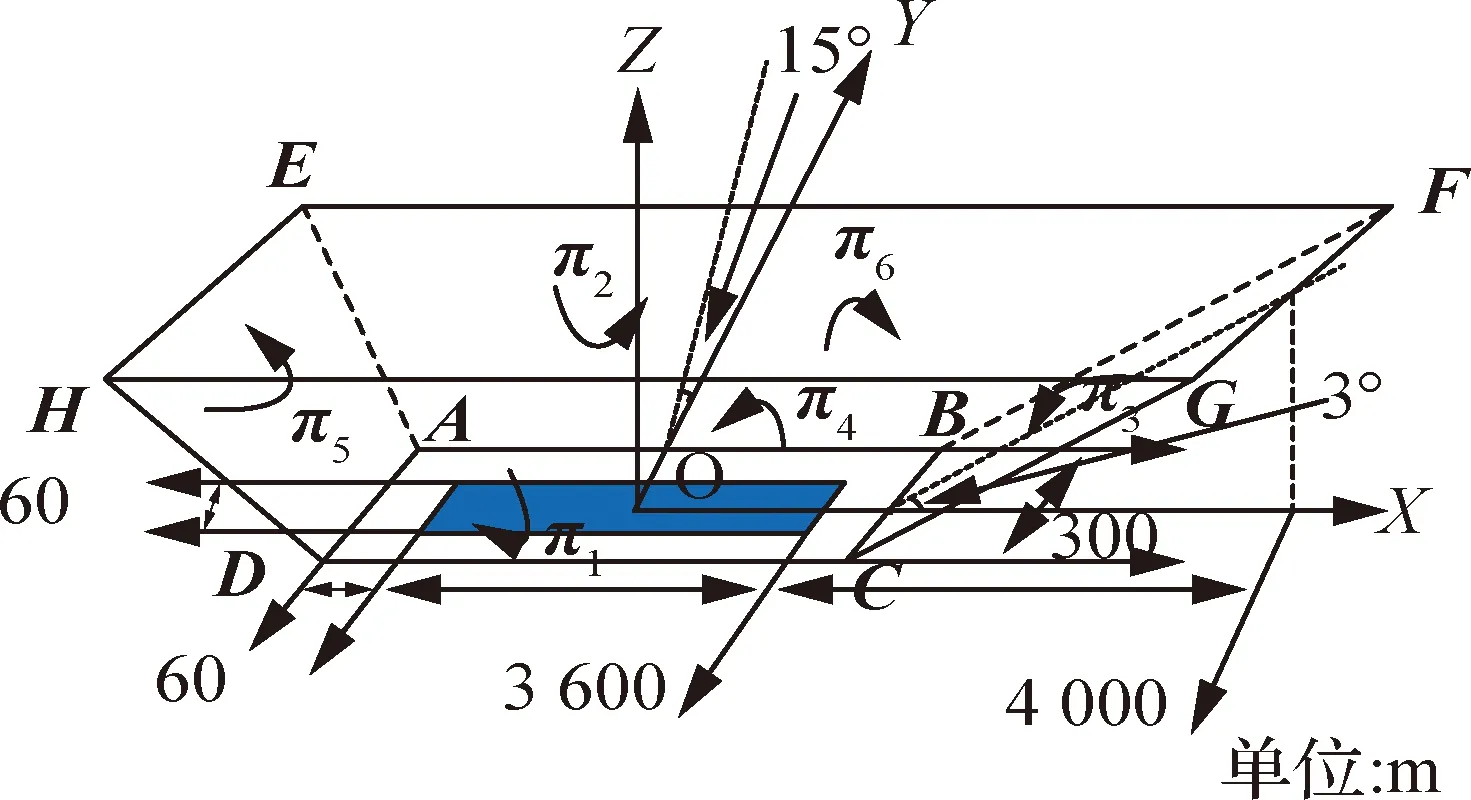
圖1 跑道保護區Fig.1 Runway protection zone




+]∧
(6)
此時,應注意共形幾何代數中的面具有方向性,如圖1中各平面上的箭頭所示,3點的順序不同,則生成面的方向也不同。同理可獲得RPZ的其他5個面的共形幾何代數表示的詳細形式。
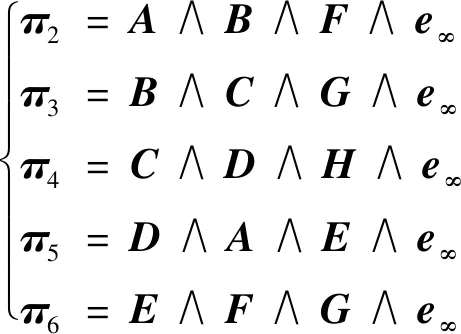
(7)
以上6個面圍成RPZ,其內部均在各面的后方,如圖1所示。
2.2 跑道侵入
飛行器大小遠小于RPZ,其形狀大小可忽略不計,近似看成一點,而RPZ可看成一多面體,從而飛行器與RPZ的位置關系可看作點與多面體的位置關系。雖然共形幾何代數的Meet運算符可以以統一的方式確定不同尺寸的2個對象之間的相交關系,且可以直接處理無邊界的基本幾何對象,但只能進行基本元素(點、線、面)的運算,而不能對“體”直接運算。為判斷點和多面體的位置關系,需要依次考慮點和形成該多面體邊界的幾個面的位置關系。
點面位置關系的問題,通常采用定性的方位描述方法,這類定性的空間描述在共形幾何代數空間一般只需要利用外積運算的方向性,直接判斷點面外積結果的正負號即可。本文引入共形幾何代數中外積的性質來判斷點是否在多面體內,從而判斷飛行器是否在RPZ內。以圖1跑道保護區中的面為例,其在共形幾何代數空間的屬性如圖2所示。
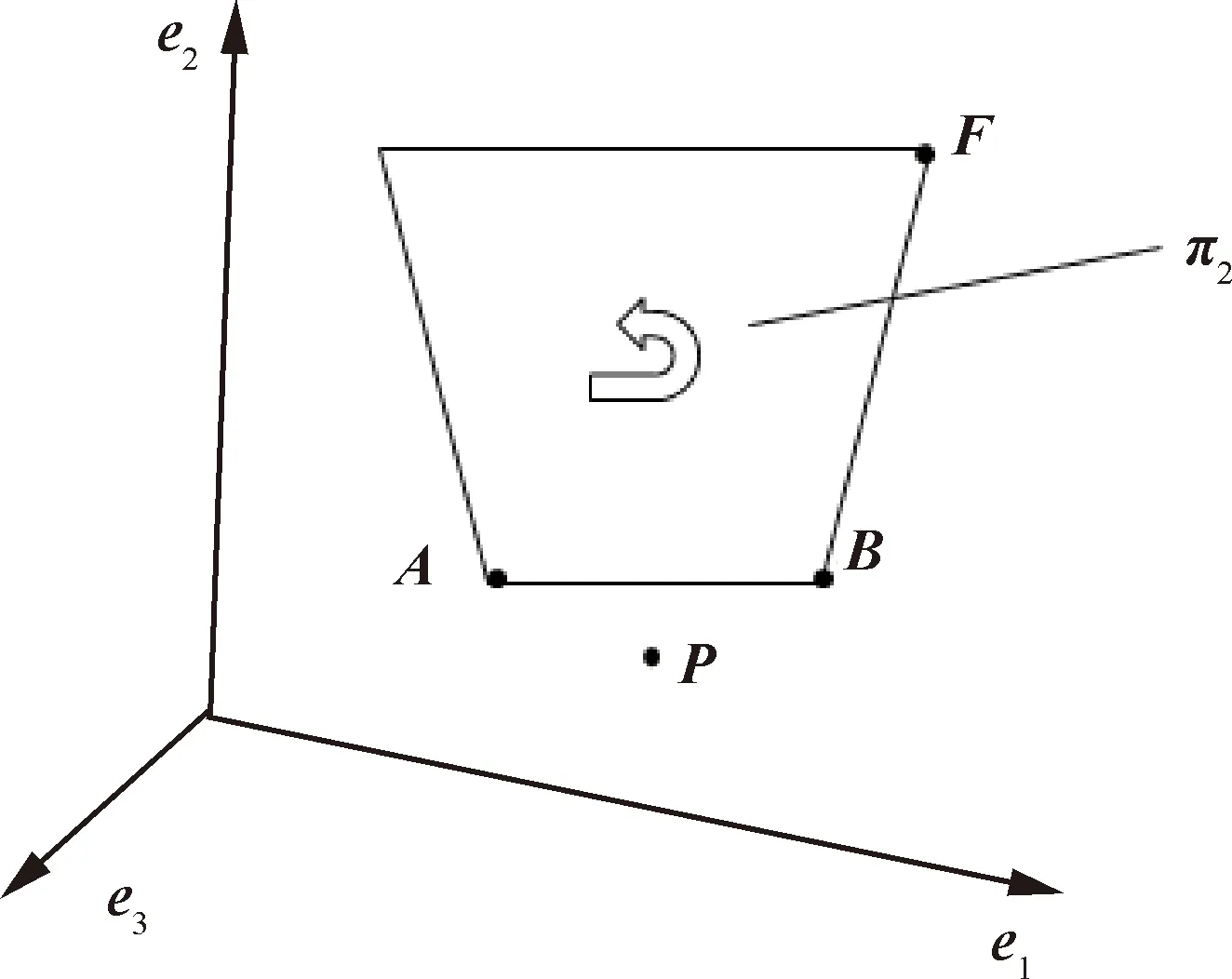
圖2 點面位置關系Fig.2 Position relationship of point and surface
令
=(∧)
(8)
在共形幾何代數中,當>0時,點位于平面順時針方向,即點位于平面前方;當<0時,點位于平面逆時針方向,點位于平面后方;當=0時,點位于平面上。
通過上述方法可以得到點與一個面的位置關系。RPZ是由6個面圍成的多面體,實際情況中飛行器始終在跑道所在面的上方,對
始終有≤0。因此只需依次判斷飛行器與其他5個面之間的位置關系:如果對某個面出現>0時,可以斷定飛行器不在RPZ內;如果對這5個面都有≤0,則飛行器在RPZ內。
這樣,通過共形幾何代數將有界的RPZ用無界的平面組合進行表示,只需要通過外積運算考慮飛行器相對于RPZ各面的方向或點面位置關系,減少判定因素,而且不依賴坐標系建立。避免了歐氏空間中需要將點代入多面體的邊界平面方程計算經過點的有向射線與多面體的交點個數來判斷位置關系,以及處理RPZ邊界延長面等各種特殊情況的處理,邏輯相對簡單。
2.3 飛行器保護區
為防止飛行器與其他飛行器、障礙物相撞,確保飛行器安全運行,必須提供其在空間上的安全距離即最小安全間隔。對于RPZ中的飛行器,水平最小安全距離由飛行器的長寬決定,垂直最小安全距離為規定值:=60.96 m。因此以飛行器中心點為球心,=max{,}為半徑的球即為飛行器保護區(保護球),其共形幾何代數形式為
(9)
實際應用中,可根據應用要求適當調節半徑大小。
2.4 跑道沖突檢測
跑道沖突檢測中,為保證有充分的安全冗余,分別以2架正在作業的飛行器中心位置、為球心,不妨以作為飛行器1保護區(球)的半徑、作為飛行器2保護區(球)的半徑做球、,用表1中球的共形幾何代數表示法1表示為
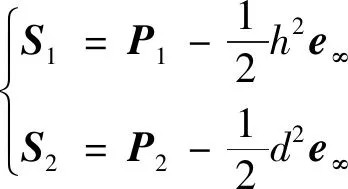
(10)
幾何代數中,為定義2點之間的度量性質,引入內積運算,計算式(10)中2球、的內積得



(11)

(12)
式(12)等號右邊等于2球半徑的平方和減去2球心之間距離的平方。考慮兩球相切的充分必要條件為

(13)
可以得到:
1) 若·<-,則2球不相交,此時認為2飛行器不發生沖突。
2) 若·≥-,則2球相交或相切,此時認為2飛行器發生沖突,其中等號成立時為相切。
這種判斷方法利用共形幾何代數的多維統一表示將水平和垂直方向維度的屬性統一起來,只需要考慮2飛行器保護區(球)之間的內積運算即可確定是否沖突,避免了歐氏空間中需要分別判斷水平和垂直方向的距離,實現了運算低維向高維的擴展,算法結構簡單。
2.5 跑道侵入與沖突檢測步驟
對機場跑道定義保護區后,設飛行器1為跑道上當前作業飛行器,飛行器2為后續作業飛行器,則基于共形幾何代數的跑道侵入與沖突檢測步驟為(流程圖如3所示):
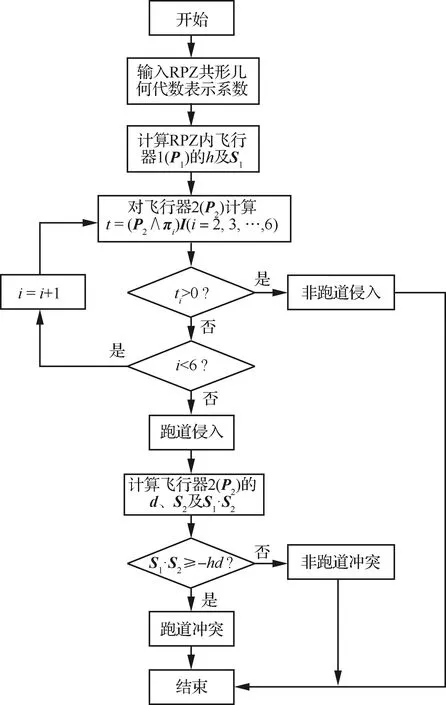
圖3 跑道侵入與沖突檢測流程圖Fig.3 Flow chart of runway incursion and conflict detection
輸入RPZ的各面的共形幾何代數表示。
對RPZ內的當前作業飛行器1(點),計算及。
對飛行器2(點),依次計算
=(∧)=2,3,…,6
如果某一>0,則飛行器2不夠成跑道侵入,繼續判斷下一時刻該飛行器或下一作業飛行器是否構成跑道侵入或算法終止;如果所有≤0,則飛行器2侵入RPZ,轉步驟4進入沖突檢測過程。
計算、、·。
如果·≥-,則飛行器2與飛行器1發生沖突,進行報警或沖突解脫。如果·<-,則2機不發生沖突,繼續判斷下一時刻該飛行器或下一飛行器是否構成跑道侵入或算法終止。
3 實驗結果
準確的航跡預測是檢測飛行器是否發生沖突的基礎,由于Kalman濾波具有較強的魯棒性和工程應用潛力,本文實驗過程中利用卡爾曼濾波進行航跡預測。
利用2020年12月14日天津濱海國際機場的ADS-B航跡數據,在GIS中構造沖突場景進行實驗分析,并同歐氏空間算法比較驗證本文算法的有效性。實驗環境為macOS Catalian、2.6 GHz雙核處理器、8 GB內存計算機、Python3.8平臺。共形幾何代數運算使用Python中基于Gaigen系統的Clifford模塊實現,該模塊可以將歐氏空間的點轉換為共形幾何代數空間形式,并進行內積、外積和幾何積等基本運算。
對圖4所示2架航班,在10∶49∶27前,計劃推入跑道的航班CCA8286(波音737機型,長度37.57 m)在RPZ內,從西北方向準備進場的航班CCA8284(波音737機型)不在RPZ內,此時經本文跑道侵入算法檢測到CCA8284不發生跑道侵入,系統也不產生告警。

圖4 未發生跑道侵入Fig.4 No runway incursions
隨著飛行器繼續運行,在10∶49∶27時檢測出CCA8284和CCA8286同時處在RPZ內,即CCA8284對CCA8286產生了跑道侵入,系統產生跑道侵入告警提示,如圖5和圖6所示。此時利用本文沖突檢測算法進行沖突檢測,結果為CCA8284和CCA8286并不沖突,但此時仍然發出跑道侵入告警,隨著飛行器的繼續運行,需要繼續進行沖突檢測。

圖5 未發生沖突的跑道侵入Fig.5 Runway incursion without conflict
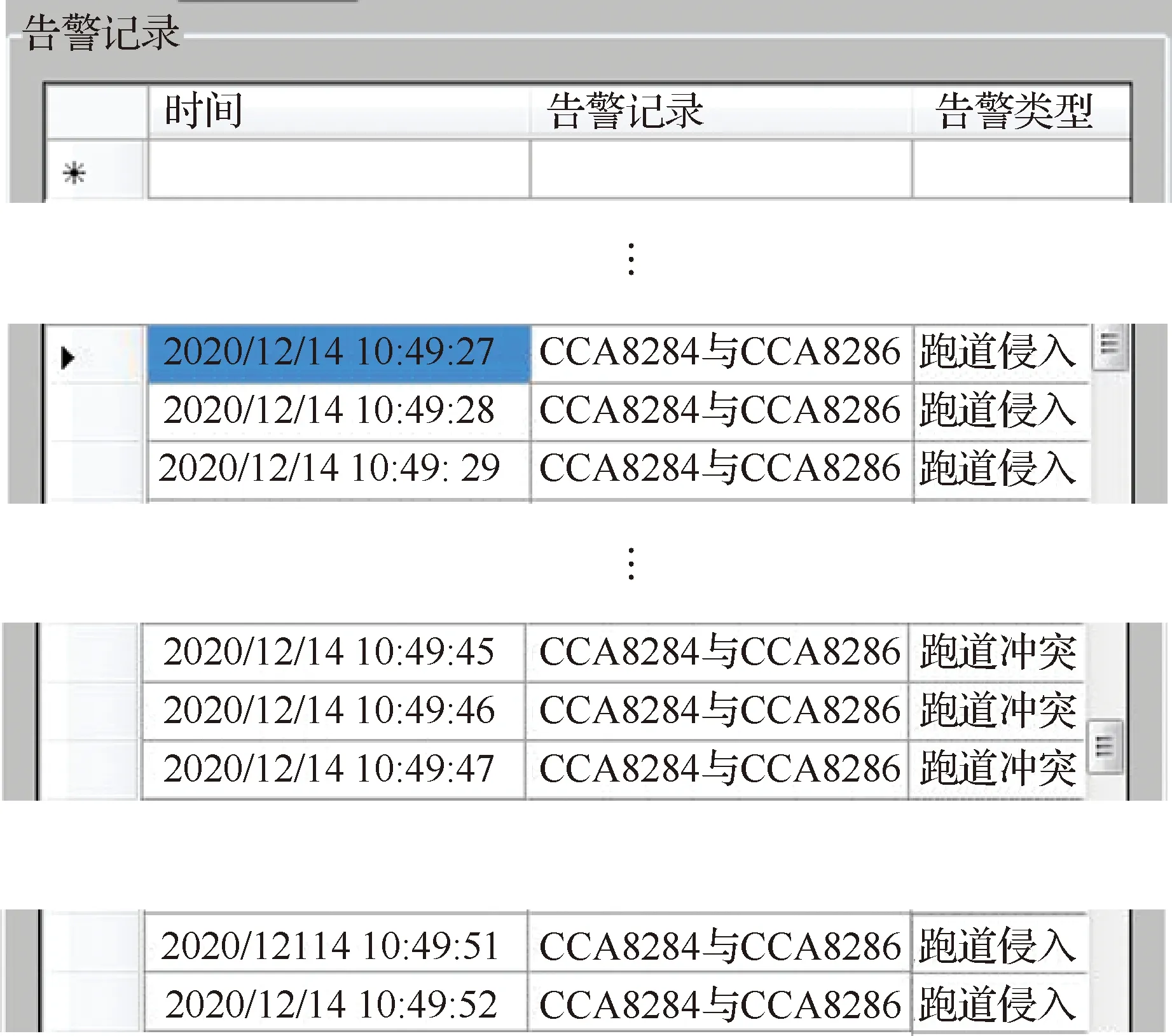
圖6 告警記錄Fig.6 Alarm record
在10∶49∶45時檢測出2機發生沖突,如圖7所示,此時系統產生跑道沖突提示告警,需立即進行沖突解脫。在10∶49∶51時,由于降落的飛行器操作優先級大于穿越跑道的飛行器,所以CCA8286減速至停止,CCA8284正常降落,變成跑道侵入狀態,系統中產生跑道侵入提示告警,如圖8所示。

圖7 跑道侵入并發生沖突Fig.7 Runway incursion and conflict

圖8 沖突后解脫Fig.8 Liberation after conflict
本文方法本質上是共形幾何代數空間中判斷點面關系及計算距離的檢測方法,因此,在相同條件及數據下通過實驗復現了文獻[1-2]中歐氏空間基于射線法和距離計算的跑道侵入和沖突檢測算法,和本文算法檢測結果一致。
實驗中對各時刻對應的跑道侵入檢測過程占用CPU時間進行了統計和對比。表3為在10∶49∶27 時刻發生跑道侵入以前,隨機選取5個時刻的跑道侵入檢測耗時結果。其中在10∶49∶27時刻,由于在該時刻發生了跑道侵入,需要完整判斷航班CCA8284與圍成跑道保護區的所有面之間的位置關系,故該時刻完成一次跑道侵入判斷的用時最長。而其他時刻只需要判斷航班與部分面之間的位置關系,耗時較短。結果表明:文獻[1-2]中歐氏空間的跑道侵入算法平均用時63 ms,而本文跑道侵入算法平均用時21 ms。即使是在跑道保護區所有面都參與運算的情況下,本文方法的運算速度也比傳統歐氏空間算法速度快近1.5倍。
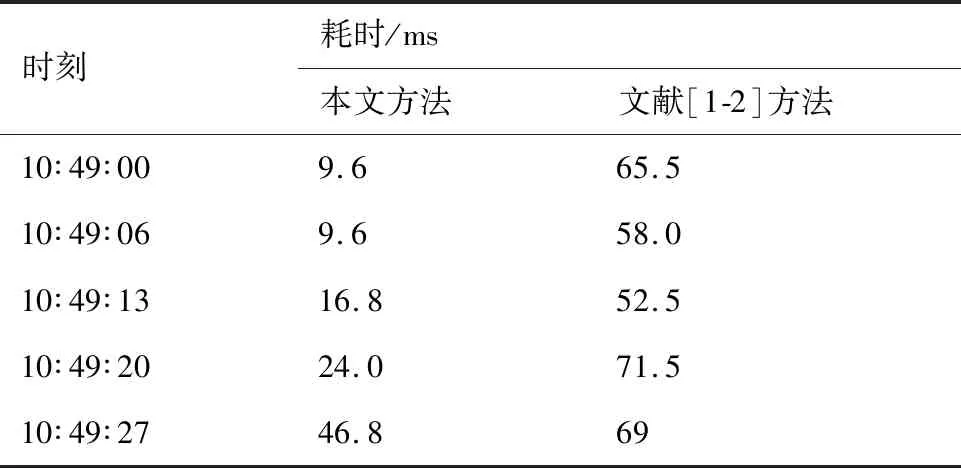
表3 跑道侵入耗時對比Table 3 Time-consumption of runway incursion conflict
這是因為:① 文獻[1-2]中跑道侵入算法需建立坐標系,確定RPZ邊界平面的方程,將點代入多面體的邊界平面方程計算經過點的有向射線與多面體的交點個數來判斷位置關系,需要解線性方程。實際計算中還需要考慮點在多面體(RPZ)的邊界或所圍面上、點在多面體所圍面的延長面上、點的射線與多面體相交于多面體的頂點上等特殊情況,需要判斷的因素過多,較為復雜,減少工作效率。② 本文算法在共形幾何代數空間中將有界的保護區通過無界的平面組合進行表示,只需要通過外積運算考慮各個點相對于保護區各面的方向就可以確定位置關系,無需建立坐標系及求解線性方程組,減少了運算量。③ 本文實驗使用Python中基于Gaigen系統的Clifford模塊實現共形幾何代數運算,通過布爾運算和預編譯實現了高性能的計算,在內積等算子運算上效率高于歐氏空間的線性代數運算效率。因此相對于歐氏空間跑道侵入計算方法,本文用時較短。
對于RPZ中的沖突檢測效率,實驗中發生跑道侵入后對各時刻對應的沖突檢測過程占用CPU時間進行了統計和對比。其中表4為在10∶49∶27發生跑道侵入以后,隨機選取5個時刻的沖突檢測耗時結果。可以看出本文算法對于RPZ中的沖突檢測效率也優于文獻[1-2]中沖突檢測算法。這是因為本文算法利用共形幾何代數的多維統一表示將水平和垂直方向維度的屬性統一起來,只需要考慮2飛行器保護區(球)之間的內積運算即可確定是否沖突。而歐氏空間需要分別判斷水平和垂直方向的距離,向高維擴展較困難,基于復雜場景的算法結構復雜,從而計算效率低。共形幾何代數運算不需要建立坐標系,在沖突檢測中減少計算量。
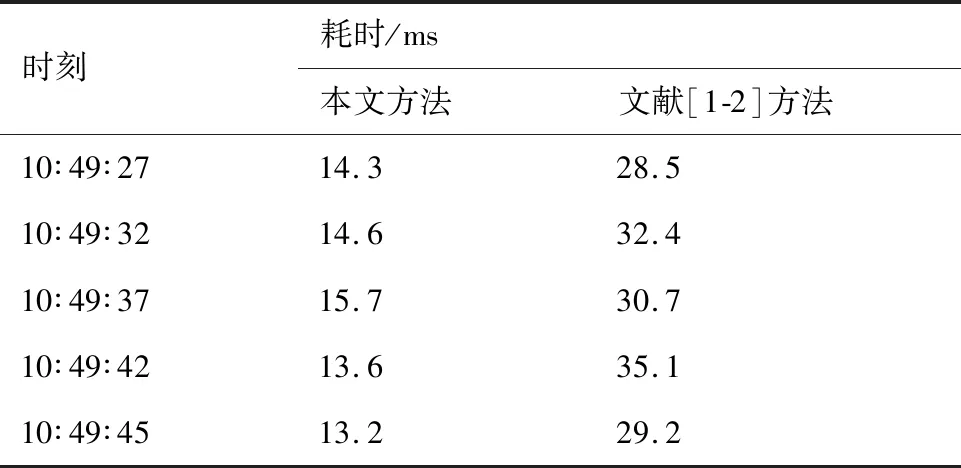
表4 沖突檢測耗時對比Table 4 Comparison of time-consumption of conflict detection
4 結 論
建立了機場跑道保護區和飛行器保護區模型的共形幾何代數描述方法,基于共形幾何代數的外積和內積運算分別提出了共形幾何代數空間的跑道侵入和跑道沖突檢測算法。研究結果表明:
1) 基于共性幾何代數的跑道侵入算法,由于將有界的保護區通過無界的平面組合進行表示,只需要通過外積運算考慮各個點相對于保護區各面的方向,減少了建立坐標系對算法效率的影響,避免了歐氏空間中各種特殊情況的處理,邏輯簡單,用時較短。
2) 基于共形幾何代數的跑道沖突檢測算法,利用共形幾何代數的多維統一表示將水平和垂直方向維度的屬性統一起來,只需要考慮2飛行器保護區(球)之間的內積運算即可確定是否沖突。避免了歐氏空間中低維向高維擴展這一難點,算法結構簡單,計算效率高。
3) 實驗表明基于共形幾何代數的跑道侵入與沖突檢測方法能夠快速、準確地判斷跑道侵入及沖突的發生,相比于歐氏空間方法在運算效率上有顯著提高。
4) 鑒于共性幾何代數優越的空間表達能力和運算效率,民航中仍有許多應用可以基于共形幾何代數方法進行描述,如飛行程序驗證中的障礙物評估以及飛行器航跡預測等。
