波浪中自由自航船舶軸系功率特性的數值預報方法
2022-07-05 03:41:08余嘉威姚朝幫張志國馮大奎王先洲
中國艦船研究 2022年3期
余嘉威,姚朝幫*,張志國,馮大奎,王先洲
1 華中科技大學 船舶與海洋工程學院,湖北 武漢 430074
2 華中科技大學 船舶和海洋水動力湖北省重點實驗室,湖北 武漢 430074
0 引 言
在傳統的船舶設計過程中,一般主要考慮靜水條件下船舶阻力和自航性能對船舶快速性和經濟性的影響[1]。然而,在實際航行過程中,船舶將不可避免地因風、浪、流等環境因素作用而發生顯著運動,導致波浪增阻和失速,從而影響船舶的經濟性。因此,對波浪中而不僅僅是靜水中的自航船舶的運動特性和適航性能開展評估和優化工作,對于船舶安全和經濟而言至關重要。
目前,船舶耐波性能預測主要有3 種實現方法:模型試驗、勢流理論和黏性計算流體動力學(computational fluid dynamics,CFD)模擬。實驗流體動力學(experimental fluid dynamics,EFD)可以為 CFD 驗證提供最可靠的數據和不確定性分析結果,雖然這種方法的周期長、成本高,但目前仍然不可替代。近年來,由于保真度高、成本低和精度高等優點,CFD 逐漸被視為預測和評估船舶耐波性的有效方法。Simonsen 等[2]采用 EFD 和 CFD研究了韓國船舶與海洋工程研究所(Korea research institute of ships and ocean engineering,KRISO)的集裝箱船(KRISO container ship,KCS)標準船模在靜水和迎浪規則波中的性能,并選擇了 URANS軟件 CFDSHIP-IOWA,STAR-CCM+ 和勢流程序AEGIR 進行了CFD 模擬;EFD 數據的不確定性分析評估結果表明,靜水不確定性的水平與平面運動機構(planar motion mechanism,PMM)相當,而波浪的水平則更高;與勢流結果相比,使用 URANS 軟件 的運動和平均阻力結果更接近測量數據。魏成柱等[3]采用URANS 方法研究了新概念高速穿梭艇系列單體船、雙體船和三體船在波浪中的航行性能。張明霞等[4]基于STAR-CCM+研究了小水線面三體船的耐波性,發現小水線面三體船側體靠近船艏時的耐波性更優。Jin 等[5]采用STAR-CCM+ 預報了2 艘液化天然氣(liquefied natural gas,LNG)運輸船在規則波中迎浪和斜浪的流體動力特性,通過不確定度分析評估了數值不確定性之后,研究了不同波浪條件下船舶的載荷和運動;計算結果與 EFD 和勢流程序預測結果的一致性較好。
除了波浪環境,轉動的螺旋槳也會導致船舶受到動態因素的影響,包括隨時間變化的尾流分布、推進因子、船舶運動、失速或儲備功率等。隨著船舶設計水平的發展,研究波浪中螺旋槳載荷波動對船舶航行性能的影響具有重要的意義,因為該工況下發動機功率和轉速將產生巨大的波動。王建華等[6]使用 CFD 結合動態重疊網格技術研究了自航標準船模ONRT 在迎浪規則波中的運動響應和失速情況,CFD 與 EFD 結果的一致性表明了該方法適用于波浪中的自航預測。Lee 等[7]使用URANS 結合有限體積法和流體體積模型(volume of fluent model,VOF)預測了KVLCC2 船模的功率增加/速度損失和推進性能,進行了靜水及波浪中的拖曳和自航仿真計算,預報了自航因子、阻力和波浪增阻等情況,并采用泰勒展開法、直接動力法、負載變化法、等推力法等4 種方法研究了波浪中的速度–功率關系和推進性能。
綜上所述,目前船舶耐波性方面的研究工作主要以約束模的試驗和仿真為主,然而,在螺旋槳對自航模船舶運動特性的影響,以及對自航模儲備功率或波浪失速及其推進性能等方面的研究成果則非常少。為此,本文擬基于KCS 船模和KP505 槳模,采用URANS 方法進行船舶波浪自由直航CFD 模擬,通過自研URANS 求解器HUSTShip 與自研結構化動態重疊網格代碼HUSTOverset 耦合求解船舶在波浪中的自航運動,并將選取基于葉元–動量混合方法的改進型體積力螺旋槳推進模型,以兼顧預報精度、可靠性和計算效率[8-10]。首先,研究波浪中兩自由度(垂蕩、縱搖)KCS 約束模的運動響應特性和波浪增阻,并通過試驗數據驗證波浪中數值計算的可靠性;然后,采用改進體積力方法對不同波浪情況下三自由度(垂蕩、縱搖和縱蕩)KCS 自航模進行直航仿真,以研究KCS 在自由直航狀態下波浪中的運動響應特性、儲備功率和推進效率,從而對比分析相同遭遇頻率下約束模與自航模船舶的運動特性差異;最后,采用對數分析法對波浪中船舶自由直航功率增加的主要成分及其具體占比進行詳細分析,用以為波浪中自由自航船舶軸系功率的特性數值預報提供參考。
1 數值方法
1.1 控制方程與改進體積力模型
本文將采用自研 CFD 求解器 HUST-Ship 開展靜水和波浪中的拖曳和自航CFD 仿真,其中HUST-Ship 的可靠性已通過各種螺旋槳、船舶和水下航行器在靜水和波浪中的仿真得以驗證[8-12]。通過對連續性方程和動量守恒方程進行時間平均,即可得到雷諾平均Navier-Stokes(RANS)控制方程:
此外,本文選擇了雙方程渦黏性k- ω模型作為湍流模型[13]。
所謂體積力方法,即在艉部添加一個簡化的圓柱區域代替螺旋槳,同時在動量方程右端添加一個體積力項fbi以產生螺旋槳相應的力和力矩。本文將采用改進型體積力(modified Osaka University method,MOUM)[6]模型,這是一種考慮了三維螺旋槳黏性效應的葉元體動量理論(blade element momentum theory,BEMT),其在迭代計算中將采用該時刻槳盤面處的瞬時速度作為螺旋槳進速。
1.2 自由液面捕捉
1.3 造波與消波方法
在HUST-Ship 中,將采用速度邊界造波方法[15]來產生目標波浪。當仿真的目標波浪波長為λ,波高為A時,其入口處的自由液面變化l(t)為

速度邊界上對應的速度分量為


式中:A,k, ω,φ分別為子成分規則波的波幅、波數、圓頻率、初始相位;d為水深;x1,x3和u1,u3分別為第1 個和第3 個坐標方向的坐標和速度;在消波過程中,為了減少波浪反射對仿真結果的影響,本文使用了網格衰減和動量消波2 種方法。
1.4 PI 速度控制器
在自航控制中,比例積分(proportional integral,PI)速度控制器是一種直接通過自由直航匹配螺旋槳轉速的方法[16],其原理是通過比例積分調節器來控制船速以符合設定值,即

式中:n為螺旋槳轉速;P為比例系數;e=utar?uship,為目標航速utar與實際航速uship之間的差值;I為積分系數。
在自研軟件HUST-Ship 中,P,I值將在計算初始時刻予以給定,然后隨著每個計算時間步而變化,直至達到目標航速并實現船長方向的受力平衡,由此即完成自航點下的轉速匹配。
2 工況與網格
2.1 仿真工況
本文仿真的船舶模型和螺旋槳模型分別為帶舵的KCS 集裝箱船和KP505 螺旋槳,縮尺比為1:37.89,該模型的敞水、阻力、自航和迎浪運動響應的實驗數據均源自Tokyo2015 研討會[17]。根據Tokyo2015 的試驗工況,設定如表1 所示的CFD仿真工況(兩自由度),其中:Lpp為船舶垂線間長;弗勞德數Fr=0.26 對應的航速,波浪中自航的轉速則可以通過 PI 速度控制器進行匹配。

表1 CFD 仿真工況的參數設置Table 1 Parameter setting of CFD simulation cases
2.2 結構化重疊網格
本文將采用結構化動態重疊網格,并通過自研重疊網格程序HUST-Overset 予以處理。自研重疊網格程序是基于結構網格的格點式重疊,包括3 個步驟:挖洞、尋點和識別貢獻單元。首先采用基于均勻網格的笛卡爾坐標網格的洞映射方法進行挖洞,然后基于交替數字二叉樹(alternating digital tree,ADT)的數據結構來尋找插值點的貢獻單元,其中貢獻單元與插值點的關系可以采用三線性插值來獲取[18-19]。
重疊網格技術可以將復雜的物體分解為若干簡單的部件,然后對各個部件單獨劃分網格,并將各個部件網格嵌入到背景網格中。例如,本文中的KCS 曲面較為復雜,可以將主船體、艉部及舵單獨劃分網格,然后拼接為整船網格,如圖1 所示。當采用多套彼此不相關的網格覆蓋整個計算域時,各套網格之間將存在重疊的部分,需通過挖洞處理將計算域之外的網格挖去,然后對剩余重疊區域的網格建立插值關系,因此可以在每套網格之間通過重疊區域進行數據交換,進而對整個計算域進行求解,所以重疊網格具有網格生成效率高、壁面模擬能力強及可以有效處理復雜空間幾何模型等優點。為了捕捉船體和螺旋槳周圍的精細流動,本文對圖1 所示的網格進行了大量加密,根據特定需求進行自由加密也是重疊網格的一個優勢。

圖1 離散槳自航工況的結構重疊網格Fig. 1 Structured overset grid for self-propulsion case of discrete propeller
3 仿真結果分析
3.1 波浪中拖航仿真
首先,按照Tokyo2015 研討會[15]所提供的試驗條件,在規則波迎浪條件下對KCS 約束模進行仿真,結果如圖2 所示。仿真中釋放了垂蕩和縱搖2 個自由度,規則波波長范圍為 0.65Lpp~1.95Lpp,陡度為恒定值(A/λ = 1/60)。圖2 中對比了4 種波浪條件下x1=0 處波高的時歷CFD 仿真曲線與EFD 理論值曲線,可以看出,兩者幾乎一致。

圖2 規則波的仿真結果與理論結果對比Fig. 2 Comparison between simulation results and theoretical results of regular wave
然后,根據國際拖曳水池會議(international towing tank conference,ITTC)所推薦的不確定度方法規程,開展波長為1.95Lpp波浪條件下阻力系數CT、垂蕩傳遞函數TF3和縱搖傳遞函數TF5的不確定度分析。表2 所示為不同網格和不同時間步長下的不確定度分析結果,表3 所示為基于試驗數據的驗證結果,其中:rG和rT分別為網格、時間步長的細化率;SG1,SG2,SG3和ST1,ST2,ST3分別為稀疏、中等、加密網格和稀疏、中等、加密時間步長的不確定度分析結果;UG和UT分別為網格、時間步長的不確定度;USN為數值不確定度;UD為試驗不確定度;UV為驗證不確定度;D為試驗數據。分析結果表明,所有的比較誤差E均小于驗證不確定度UV,即表明本文在UV水平下驗證了數值計算結果。該波浪條件下,仿真預報的運動響應與試驗結果的誤差不大于1%。圖3 為垂蕩和縱搖運動響應的仿真曲線與試驗曲線,可見仿真誤差均小于5%,這表明HUST-Ship 可以準確地預報船舶在波浪中的運動。

圖3 垂蕩和縱搖運動響應的仿真曲線與試驗曲線Fig. 3 Simulation curve and test curve of heave and pitch motion response

表2 不同網格和時間步長下的不確定度分析結果Table 2 Uncertainty analysis results under different grids and time steps

表3 基于試驗數據的驗證結果Table 3 Validation results based on test data
3.2 波浪中自航仿真
本節在4 種波浪條件下進行波浪自航仿真,其中自航模釋放了垂蕩、縱搖和縱蕩3 個自由度,以目標航速2.017 m/s 為控制目標,并采用PI 控制方法來匹配該目標航速所對應的螺旋槳轉速。KCS 船模在不同波浪下迎浪自航的螺旋槳轉速和相對航速的時歷仿真曲線如圖4 所示。

圖4 KCS 船模在不同波浪條件下自航過程中的螺旋槳轉速和船速曲線Fig. 4 Propeller rotation speed and ship speed curves for KCS self-propulsion simulations under different wave conditions
圖5 所示為波浪中自航模與約束模這2 種不同仿真方法的運動響應對比曲線,可見看出,相較于約束模,KCS 自航模在迎浪中的船舶運動響應傳遞函數值偏低,但偏差小于5%。由此可見,螺旋槳對船舶運動幅度的影響非常小,從而驗證了采用拖曳試驗預報自航船舶在波浪中運動響應的合理性。
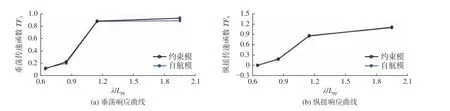
圖5 波浪中自航模與約束模的垂蕩與縱搖響應曲線Fig. 5 Heave and pitch response curves with/without propeller in waves
表4 中所示為波浪增阻與波浪中自航的仿真結果,其中,ΔR為波浪增阻,Q為螺旋槳扭矩。

表4 波浪增阻與波浪中自航的仿真結果Table 4 Simulation results of added resistance and selfpropulsion in waves
為了詳細分析船舶在波浪中功率增加的影響成分及占比,本文將采用對數分析法[20]對船舶推進效率η=Ru/2πnQ進行詳細分析,即量化波浪增阻R、航速u及推進效率η 對波浪自航儲備功率2πnQ的貢獻百分比,具體如下:

式中,下標w 和cw 分別表示波浪和靜水工況。由于本文的仿真過程以航速為控制目標,故最終狀態的平均航速uw=ucw。
結合式(7)及表4 的仿真結果可知,KCS 船模在波浪中自航時的功率增加主要由推進效率和波浪增阻這2 個因素所致,其中推進效率和波浪增阻對功率增加的貢獻占比分別為23%~26%和74%~77%,即儲備功率主要因波浪增阻所致,而波浪增阻主要因船舶運動所致,因此,減小船舶運動以降低波浪增阻是降低波浪中功率增加的最有效方法。
4 結 論
本文基于KCS 船模和KP505 槳模,通過自研URANS 求解器HUST-Ship 與自研結構化動態重疊網格代碼HUST-Overset 耦合求解了船舶在波浪中的自航運動,并采用URANS 方法開展了船舶波浪自由直航CFD 模擬,得到如下結論:
1) 根據CFD 結果與EFD 數據的對比結果,驗證了采用HUST-Ship 耦合重疊網格代碼HUSTOverset 求解船舶在波浪中運動響應的可靠性。
2) 根據波浪中自航模與約束模的仿真運動響應結果,自航模的船舶運動響應傳遞函數值偏低,但偏差小于 5%,因此,螺旋槳對船舶運動響應的影響很小,從而驗證了采用拖曳試驗來預報自航船舶在波浪中運動響應的合理性。
3) 船舶在波浪中的功率增加主要由推進效率和波浪增阻兩方面因素引起,其中波浪增阻的貢獻占比更大。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國船檢(2017年3期)2017-05-18 11:33:09
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56