項目引路,AI賦能,創意無限
2022-07-06 06:51:20王宇涵張崇珍上海人工智能實驗室
中國信息技術教育 2022年13期
王宇涵 張崇珍 上海人工智能實驗室
項目化學習是在建構主義理論、情境認知理論和學習遷移理論的指導下發展的,強調以學生為中心,學生通過設計基于情境的驅動性問題,主動接受、解釋和加工信息,進而使得真實情境與學科知識產生聯結,使得學習者與學習環境產生深度交互,并實現知識遷移的新型學習方式。
筆者所在的上海人工智能實驗室(以下簡稱“實驗室”),嘗試借助形式多樣的AI科創活動,通過完整的項目化學習實踐過程,引導青少年理解人工智能學科知識并運用多學科知識解決基于真實情境的驅動問題。
從活動的人工智能項目化學習成果來看,根據人工智能在項目中的功用分類,可以得學習成果分為“將AI作為研究對象”“將AI作為研究工具”和“將AI作為應用技術”。下面,筆者分別介紹活動中的四個項目成果,希望能為中小學教師的人工智能項目化學習實踐提供更多思路。
● 將AI作為研究對象
“將AI作為研究對象”是指對人工智能算法模型進行改進和優化。
項目:基于改進STN的鳥類中細粒度分類算法研究。
該項目將計算機視覺中的細粒度圖像分析作為研究任務,在CUB200-201數據集中將反映動物空間結構的關鍵點坐標與空間變換網絡(Spatial Transformer Network,STN)相融合(如圖1),有效解決了同一鳥類姿態差異較大而導致識別率下降的問題。實驗結果表明,該項目加入PoseSTN模塊改進后,在運行時間縮短一半的基礎上,鳥類識別準確率提升了21%。
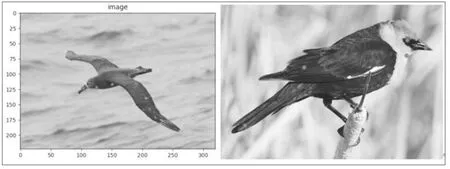
圖1 CUB200-201數據集及其部位關鍵點標注
● 將AI作為研究工具
“將AI作為研究工具”是指中小學生對某一具體真實問題開展理論探究、求證。
項目:黑板反光問題研究。
基于黑板表面在強陽光照射下會產生巨大的反光亮斑,影響教學體驗和教學質量,項目團隊通過攝像頭拍攝黑板照片,判斷入射光進入教室的方位。該程序算法首先使用矩形矯正算法獲取黑板的四個頂點(如圖2),經過透視變換將黑板的照片矯正成二維正面的矩形圖,然后將該矩形圖分割成100個左右的小方格,并使用自建數據集訓練的卷積神經網絡將每個小方格分類成“光心”“光暈”和“無光”,得到分類結果矩陣,再對該矩陣進行減噪處理,最終得到亮斑中心位置。以此為基礎代入教室尺寸數據,進行幾何光學計算,就可以得出入射光線的方向以及應拉動的窗簾。

圖2 黑板矩形未矯正的圖像
● 將AI作為應用技術
“將AI作為應用技術”是指用AI相關技術解決真實世界的客觀問題,并將成果應用于物理場景案例中。
項目:基于人體姿態識別和機器學習的武術教學及評價系統。
武術教學和評價的標準化和規范化是學校體育教學中的難點,項目團隊利用人體檢測、人體姿態識別等技術,將一整套動作分解為單個基礎動作,并對此進行識別、分類、對比、評價(如圖3)。同時,比較了基于分類規則和基于機器學習兩種方法,通過實驗結果證明基于機器學習的分類在準確率、適應性方面都有明顯優勢。

圖3 使用基于機器學習的分類器對視頻評分
項目:車輛駕駛視覺輔助系統。
在駕駛車輛時,由于車速過快、駕駛員視力不好、樹枝綠化遮擋、駕駛員開小差、傍晚黃昏夜間光線不足等,駕駛者經常會漏看路上的交通標志牌、地面導向標志、紅綠燈、行人、非機動車等,導致駕駛違章,甚至是發生事故。該項目借助神經網絡進行深度學習,運用卷積算法提取圖像的特征,依靠GPU高效的并行計算架構完成實時目標檢測。系統可識別道路交通標志、地面導向標志、機動車、非機動車、行人、交通信號燈等目標,輔助觀察前方道路、被汽車A柱遮擋區域、轉彎和倒車盲區等位置,彌補夜間視線模糊情況,給予駕駛者適當提示,避免違章,防止事故發生,提升主動安全。
● 總結展望
隨著人工智能普及教育的發展,越來越多的中小學生參與到中小學人工智能項目化學習實踐中,其學科項目化學習成果、學科知識的理解與應用能力也得到不斷發展。后續,筆者所在團隊會繼續挖掘、融合更多平臺資源優勢,啟發學生思考真實問題,制訂項目化學習計劃,完成具有個性化、創意性的人工智能項目,為青少年人工智能教育生態建設和人才集聚提供良好支撐,為我國選拔和培養人工智能領域的未來人才助力。
猜你喜歡
福建中學數學(2023年5期)2024-01-25 17:41:36
中學生數理化·中考版(2022年10期)2022-11-10 09:37:46
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
小康(2017年16期)2017-06-07 09:00:59
護士進修雜志(2017年3期)2017-02-14 07:19:35
