無人物流車路徑跟蹤控制算法研究
2022-07-06 03:57:56甘鑫覃高峰何靜如何逸波林智桂
中國儲(chǔ)運(yùn) 2022年7期
文/甘鑫 覃高峰 何靜如 何逸波 林智桂
工廠無人化是智慧工廠事實(shí)的重要體現(xiàn),工廠物流的無人化則是實(shí)現(xiàn)工廠無人化的關(guān)鍵技術(shù),而車輛的路徑跟蹤技術(shù)是無人物流車輛駕駛系統(tǒng)的核心技術(shù)之一。本文首先介紹車輛路徑跟蹤算法的研究進(jìn)展,以物流車輛為載體,闡述無人物流車輛自動(dòng)駕駛系統(tǒng)的搭建以及路徑跟蹤算法在車輛中的應(yīng)用情況。針對(duì)無人物流車輛低速、固定場(chǎng)景、低成本的設(shè)計(jì)特性,本文提出采用純跟蹤控制的綜合控制策略,考慮車輛橫縱控制,實(shí)現(xiàn)對(duì)無人物流車輛的穩(wěn)定跟蹤控制。根據(jù)實(shí)際物流運(yùn)行驗(yàn)證,車輛所使用的控制邏輯算法能夠滿足工廠物流系統(tǒng)12小時(shí)持續(xù)穩(wěn)定運(yùn)行工況。
1.引言.
車輛無人駕駛是目前研究的熱點(diǎn)領(lǐng)域,目前針對(duì)封閉廠區(qū)的特殊場(chǎng)景以及可以實(shí)現(xiàn)完全無人化的點(diǎn)對(duì)點(diǎn)車輛自動(dòng)駕駛,如廠區(qū)物資運(yùn)送的無人化物流系統(tǒng)。實(shí)現(xiàn)廠區(qū)物流無人駕駛能夠提高廠區(qū)自動(dòng)化、智能化,保障員工工作環(huán)境、提高物流效率、減少廠區(qū)物流成本。無人物流車輛主要采用具體驅(qū)動(dòng)裝置的車輛作為牽引車輛,牽引車后使用托掛鉤裝置掛載多個(gè)物料拖車組成。為了達(dá)到靈活轉(zhuǎn)向的目的。相對(duì)于一般乘用車,無人物流牽引車由于較短的前后輪軸距,導(dǎo)致車輛對(duì)于前輪偏角的變化更為敏感,對(duì)車輛的橫向控制精度、控制模型的準(zhǔn)確性、穩(wěn)定性要求較高。路徑跟蹤控制是無人物流車輛實(shí)現(xiàn)的核心技術(shù)之一,即通過獲取車輛實(shí)時(shí)規(guī)劃的實(shí)時(shí)行駛軌跡,使用有效的路徑跟蹤算法實(shí)現(xiàn)對(duì)車輛的控制,以達(dá)到車輛行駛在正確路線上的目的[1]。傳統(tǒng)的跟蹤控制算法如滑模控制[2]、模糊PID控制[3]等,隨著控制技術(shù)的發(fā)展,衍生出更為智能的車輛控制方法,如線性二次型調(diào)節(jié)控制[4]和模型預(yù)測(cè)控制[5,6]等。本文主要研究廠區(qū)物流車輛無人化控制中車輛路徑跟蹤控制的相關(guān)技術(shù)。針對(duì)無人物流車輛的運(yùn)行特點(diǎn),本文提出采用嵌入式車輛控制器作為中央主控系統(tǒng)的方案,在此方案基礎(chǔ)之上,需要考慮車輛考慮控制系統(tǒng)的低算力負(fù)載消耗,同時(shí)保證車輛控制的穩(wěn)定性以及精確性。
2.無人控制系統(tǒng)設(shè)計(jì).
通過充分考慮無人物流車輛無人駕駛系統(tǒng)的較高實(shí)時(shí)性、較為苛刻的負(fù)載分配限制,本文設(shè)計(jì)的基于嵌入式芯片和LINUX系統(tǒng)的DDS通信框架,實(shí)現(xiàn)了各模塊之間毫秒級(jí)的數(shù)據(jù)時(shí)間同步,滿足各模塊運(yùn)行實(shí)時(shí)性能的要求。無人物流車輛采用的自動(dòng)控制系統(tǒng)架構(gòu)如圖2-1所示。

圖2-1無人駕駛系統(tǒng)框架示意圖

圖2-2無人駕駛系統(tǒng)各模塊介紹
在無人駕駛系統(tǒng)架構(gòu)之上,便可以搭建無人駕駛系統(tǒng)的各功能模塊。無人駕駛系統(tǒng)各系統(tǒng)模塊的工作數(shù)據(jù)流如圖2-2所示。傳感器驅(qū)動(dòng)程序?qū)④囕v傳感器硬件采集到的環(huán)境信息數(shù)據(jù)發(fā)送至車輛局域網(wǎng)絡(luò)內(nèi)。車輛環(huán)境感知可分為自車位置識(shí)別以及障礙物識(shí)別,通過獲取車輛所在位置的3D點(diǎn)云地圖以及GNSS-RTK信號(hào),使用SLAM算法匹配融合,計(jì)算得到車輛當(dāng)前的實(shí)時(shí)位置數(shù)據(jù);結(jié)合激光雷達(dá)的三維點(diǎn)云數(shù)據(jù),障礙物感知模塊可識(shí)別周圍動(dòng)態(tài)、靜態(tài)障礙物輪廓、運(yùn)動(dòng)方向、速度等數(shù)據(jù)信息。通過獲取車輛自身的位置數(shù)據(jù)、周圍障礙物數(shù)據(jù),車輛決策規(guī)劃模塊可進(jìn)行車輛運(yùn)動(dòng)行為判斷以及行駛路線軌跡規(guī)劃,由跟蹤控制模塊根據(jù)局部行駛路徑進(jìn)行最終車輛執(zhí)行器執(zhí)行數(shù)據(jù)計(jì)算,獲得最終的車輛執(zhí)行信號(hào),通過CAN總線端口下發(fā)至車輛執(zhí)行器,完成車輛的實(shí)際控制。
3.無人物流車輛跟蹤控制算法設(shè)計(jì).
無人物流駕駛系統(tǒng)的路徑跟蹤算法已有較多的研究,針對(duì)車輛橫向控制精度與控制穩(wěn)定性能問題。本文提出使用純跟蹤算法進(jìn)行車輛橫向控制。目前主流的橫向控制算法分為兩大類:基于模型的預(yù)測(cè)控制方法、基于幾何追蹤的控制方法。相較于基于模型的控制方法,純跟蹤法只需要構(gòu)建車輛的單車運(yùn)行學(xué)模型,使用較低的計(jì)算算力便能夠完成車輛前輪轉(zhuǎn)向角度的計(jì)算。本文基于阿克曼轉(zhuǎn)向車輛為研究基礎(chǔ),闡述純跟蹤路徑跟蹤控制算法的設(shè)計(jì)與實(shí)現(xiàn)過程。純跟蹤算法以車輛后軸的車輛控制參考點(diǎn),構(gòu)造車輛自行車模型,如圖3-1所示。假設(shè)車輛在單一時(shí)刻車輛轉(zhuǎn)向行駛軌跡為圓弧軌跡,即車輛可以沿著一條目標(biāo)點(diǎn)P的圓弧行駛。假設(shè)車輛需要跟蹤的下一個(gè)目標(biāo)點(diǎn)為P1(Px1-Py1),目標(biāo)點(diǎn)位于車輛行駛的參考軌跡內(nèi)。假設(shè)ld為車輛當(dāng)前位置到目標(biāo)點(diǎn)P的直線距離;α為車輛目前姿態(tài)與目標(biāo)點(diǎn)的夾角;R為車輛轉(zhuǎn)向半徑,根據(jù)幾何計(jì)算,能夠得到

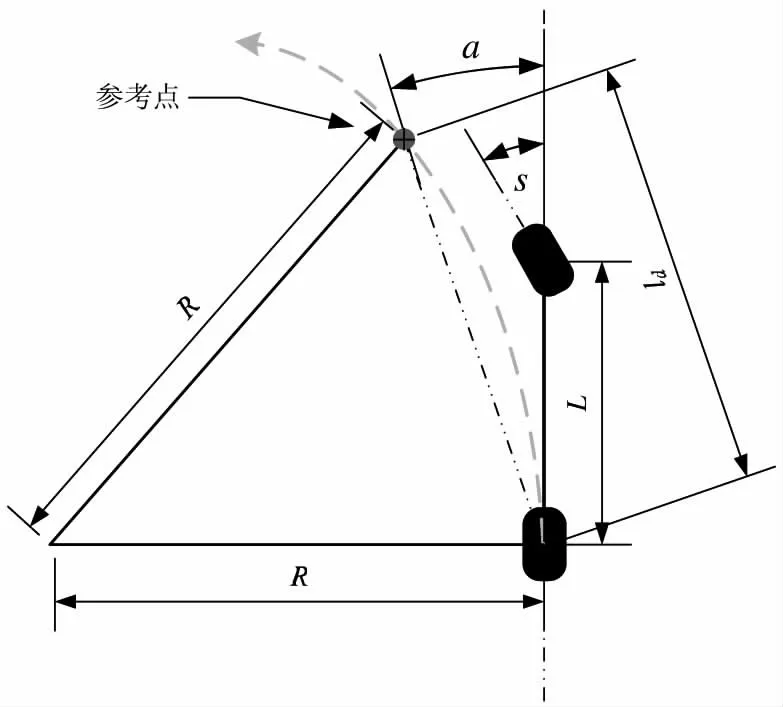
圖3-1車輛自行車模型
4.實(shí)車運(yùn)行情況.
在上汽通用五菱有限公司柳州河西基地,采用本文設(shè)計(jì)的無人物流車輛控制系統(tǒng)的物流車輛以及實(shí)現(xiàn)了常態(tài)化運(yùn)行測(cè)試,車輛無人化運(yùn)行能夠滿足12小時(shí)的穩(wěn)定運(yùn)行,如圖4-1所示,為車輛實(shí)際運(yùn)行過程圖片。目前車輛運(yùn)行線路單圈總長為2.3公里,車輛無避讓運(yùn)行速度為15km/h,單圈運(yùn)行時(shí)間約為10-20分鐘,滿足廠區(qū)內(nèi)車間物料運(yùn)輸要求。經(jīng)過實(shí)車單次測(cè)試,車輛實(shí)際運(yùn)行5圈物流線路,完成約10km的路線行駛,車輛實(shí)際控制一致性較好,橫向控制精度達(dá)到5cm以內(nèi)。

圖4-1無人物流車輛實(shí)際運(yùn)行
5.結(jié)論.
本文針對(duì)廠區(qū)物流車輛的無人化進(jìn)行研究與應(yīng)用,設(shè)計(jì)并采用嵌入式的車輛主控方案,搭建車輛的無人駕駛系統(tǒng),使用DDS協(xié)議作為無人駕駛系統(tǒng)的底層通信協(xié)議,實(shí)現(xiàn)的在嵌入式系統(tǒng)中的數(shù)據(jù)實(shí)時(shí)性傳輸、較低算力和負(fù)載消耗的自動(dòng)控制系統(tǒng)搭建。本文提出采用純跟蹤橫向控制算法邏輯進(jìn)行控制算法設(shè)計(jì)。采用該方法能夠有效減少控制模塊對(duì)系統(tǒng)資源的消耗,同時(shí)能夠?qū)崿F(xiàn)車輛長時(shí)間穩(wěn)定運(yùn)行。經(jīng)過實(shí)車測(cè)試,表明該控制方法能夠?qū)崿F(xiàn)車輛12小時(shí)的持續(xù)運(yùn)行,同時(shí)車輛控制的一致性較好,滿足了廠區(qū)車間物流的實(shí)際使用要求,對(duì)廠區(qū)物流成本控制、效率提高等均有較大的幫助。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
物流技術(shù)與應(yīng)用(2020年11期)2020-03-11 03:11:36
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
汽車觀察(2018年12期)2018-12-26 01:05:44
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:16
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09